PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
1. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
2l<br />
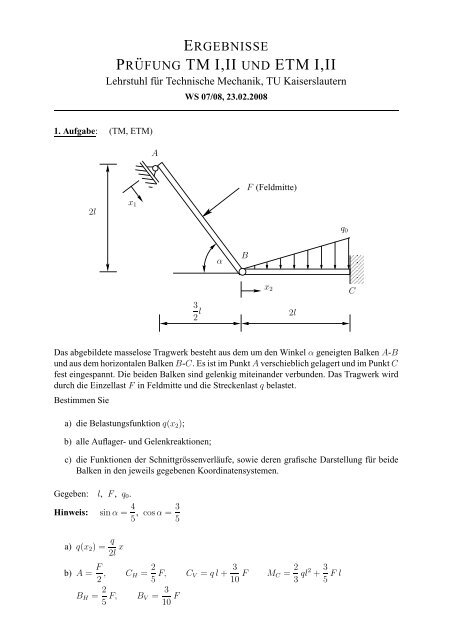
ERGEBNISSE<br />
<strong>PR</strong>ÜFUNG <strong>TM</strong> I,<strong>II</strong> <strong>UND</strong> E<strong>TM</strong> I,<strong>II</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> <strong>Technische</strong> <strong>Mechanik</strong>, TU Kaiserslautern<br />
x1<br />
A<br />
WS 07/08, 23.02.2008<br />
3<br />
2 l<br />
α<br />
B<br />
F (Feldmitte)<br />
x2<br />
2l<br />
q0<br />
000 111<br />
000 111<br />
000 111<br />
000 111<br />
Das abgebildete masselose Tragwerk besteht aus dem um den Winkelαgeneigten Balken A-B<br />
und aus dem horizontalen BalkenB-C. Es ist im PunktAverschieblich gelagert und im PunktC<br />
fest eingespannt. Die beiden Balken sind gelenkig miteinander verbunden. Das Tragwerk wird<br />
durch die EinzellastF in Feldmitte und die Streckenlast q belastet.<br />
Bestimmen Sie<br />
a) die Belastungsfunktionq(x2);<br />
b) alle Auflager- und Gelenkreaktionen;<br />
c) die Funktionen der Schnittgrössenverläufe, sowie deren grafische Darstellung <strong>für</strong> beide<br />
Balken in den jeweils gegebenen Koordinatensystemen.<br />
Gegeben: l, F , q0.<br />
Hinweis: sinα = 4 3<br />
, cosα =<br />
5 5<br />
a) q(x2) = q<br />
2l x<br />
b) A = F<br />
2 , CH = 2<br />
5 F, CV = ql+ 3<br />
10 F MC = 2<br />
3 ql2 + 3<br />
F l<br />
5<br />
BH = 2<br />
5 F, BV = 3<br />
10 F<br />
C
c)<br />
0 ≤ x1 ≤ 5<br />
4 l<br />
0 ≤ x1 ≤ 5<br />
2 l<br />
0 ≤ x2 ≤ 2l<br />
x1<br />
x1<br />
BH<br />
N(x)<br />
Q(x)<br />
M(x)<br />
A<br />
A<br />
BV<br />
x2<br />
F<br />
2<br />
0<br />
Q<br />
+<br />
+<br />
N<br />
Q<br />
F<br />
M<br />
N<br />
Q<br />
N<br />
M<br />
M<br />
− F<br />
2 − 3<br />
10 F<br />
5<br />
8 Fl<br />
+<br />
quadratisch<br />
kubisch<br />
N(x1) = 0<br />
Q(x1) = F<br />
2<br />
M(x1) = F<br />
2 x1<br />
N(x1) = 0<br />
Q(x1) = − F<br />
M(x1) = F<br />
N(x2) = 2<br />
5 F<br />
2<br />
<br />
5 x1<br />
l−<br />
4 2<br />
Q(x2) = − 3 q<br />
F −<br />
10 4l x22 M(x2) = − 3<br />
10 Fx2 − q<br />
12l x32 2<br />
5F − 3<br />
F −ql 10<br />
3 2<br />
Fl− 5 3 ql2
2. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
a<br />
2<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111<br />
µ2<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111 µ1<br />
00000000000000<br />
11111111111111<br />
r<br />
00000000000000<br />
11111111111111<br />
F<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111<br />
00000000000000<br />
11111111111111 α<br />
0000000000000000000<br />
1111111111111111111 00000000000000<br />
11111111111111<br />
0000000000000000000<br />
1111111111111111111 00000000000000<br />
11111111111111<br />
0000000000000000000<br />
1111111111111111111 00000000000000<br />
11111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
µ1<br />
a<br />
2<br />
b<br />
Ein masseloser Keil wird mit der Kraft F unter eine massebehaftete Scheibe mit der Masse m<br />
geschoben. Zwischen dem Keil und der Unterlage und zwischen der Scheibe und der Wand<br />
wirkt der Reibungskoeffizientµ1, zwischen Keil und Scheibe der Reibungskoeffizientµ2.<br />
Bestimmen Sie<br />
a) den Schwerpunkt der Scheibe im angegebenen Koordinatensystem;<br />
b) die Mindestgröße der Kraft F <strong>für</strong> den Fall, dass der Keil gerade nicht herausrutscht.<br />
Gegeben: a = 6cm; b = 2cm; r = 5<br />
2 √ π cm;<br />
m; α = 30◦ ; µ1 = 1<br />
10 ; µ2 = 1<br />
5<br />
a) xs = 4 47<br />
143 cm ys = 3 61<br />
143 cm<br />
b) F = −G cosα−µ1sinα<br />
1−µ1µ2<br />
y<br />
b<br />
<br />
<br />
(µ1µ2 −1)sinα+(µ1 +µ2)cosα = 0,192G<br />
a<br />
2<br />
a<br />
2<br />
x
3. Aufgabe: (<strong>TM</strong>)<br />
l<br />
2<br />
l<br />
l<br />
2<br />
l<br />
F<br />
l<br />
2<br />
2F<br />
3<br />
2 l<br />
A G<br />
B<br />
M<br />
C D<br />
H<br />
Das dargestellte System besteht aus vier masselosen starren Balken. Es ist wie angegeben durch<br />
zwei EinzellastenF und2F , ein EinzelmomentM und eine konstante Streckenlast q belastet.<br />
Berechnen Sie mit dem Prinzip der virtuellen Verschiebungen<br />
a) Die horizontale Auflagerkraft inA;<br />
b) Die vertikale Auflagerkraft inA;<br />
Gegeben: F, q, M, l<br />
Anmerkung: Sämtliche Polpläne, Verschiebungsbilder sowie kinematischen Beziehungen sind<br />
anzugeben.<br />
Eine Lösung der Aufgabe mit Gleichgewichtsbedingungen wird nicht bewertet.<br />
a) AH = 4<br />
3 F<br />
b) AV = 4<br />
5<br />
F + 3<br />
5<br />
3M<br />
ql −<br />
5 l<br />
2l<br />
q
4. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
l<br />
l<br />
q0<br />
D<br />
qz<br />
s1<br />
C<br />
3l<br />
B<br />
l<br />
A<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
000000000<br />
111111111<br />
Das dargestellte masselose System besteht aus einem Ausleger mit kreisrundem Querschnitt<br />
(Radius R, ElastizitätsmodulE, Schubmodul G) und einem starrem Hebel. Der Hebel und der<br />
Ausleger sind inC rechtwinklig fest miteinander verschweißt.<br />
Der Ausleger ist in A fest eingespannt, über den Hebel wird eine lineare Streckenlast qz(y) in<br />
das System eingebracht.<br />
Das Tragwerk liegt in derx,y-Ebene.<br />
Bestimmen Sie<br />
a) die Schnittgrößen im Ausleger in Abhängigkeit der angegebenen Koordinates1,<br />
b) die Durchbiegung im PunktC,<br />
c) die Verdrehung des Auslegers im Punkt C,<br />
d) die Absenkung an der StelleDund<br />
e) den Spannungstensor im PunktB (s1 = 2l, z = R).<br />
Gegeben: E, G, l, q0, R = l/20.<br />
2 q0l<br />
a) Nx(s1) = 0 Qz(s1) = lq0 Mx =<br />
3<br />
b) w(C) = − 576·104 q0<br />
Eπ<br />
= −1.8346·10 6q0<br />
E<br />
c) ϕ(C) = 32·104 q0<br />
= 1.10859·105<br />
Gπl2 Gl2 d) Zwei Anteile:<br />
• Absenkung inC<br />
• Anteil aus Torsion: −ltan(ϕ) ≈ −lϕ<br />
w(D) = − 576·104 q0<br />
Eπ<br />
− 32·104 q0<br />
Gπl<br />
My(s1) = −lq0s1<br />
x<br />
z<br />
y
e) Klare Null-Anteile<br />
• Anteil aus NormalkraftσNx = 0, daNx(s1) = 0,<br />
• Anteileσy = τyz = 0, keine Belastung in y-Richtung,<br />
• Anteileσz = 0, keine Lasten in z-Richtung entlang Balkenachse.<br />
Normalspannung aus Biegung:<br />
σx(s1) = M(s1)<br />
z daher<br />
Iy<br />
σx(B) = −8l2 q0R<br />
πR 2<br />
und<br />
Schubspannung aus Torsion:<br />
τp(r) = Mx<br />
r =<br />
It<br />
4q0<br />
3πl2 τp(r) = τxy.<br />
Schubspannung aus Querkraft:<br />
τxz = 0
5. Aufgabe: (<strong>TM</strong>)<br />
Qy<br />
e<br />
s1<br />
y<br />
l<br />
Dargestellt ist der Querschnitt eines symmetrischen dünnwandigen Profils mit konstanter Wanddicke<br />
t. Das Profil ist durch die Querkraft Qy belastet, deren Wirkungslinie gegenüber der<br />
y-Achse um den Betrag e verschoben ist.<br />
a) Bestimmen Sie die Lage des Schwerpunkts S, d.h. bestimmen Sie den Abstand a zum<br />
Profil.<br />
b) Bestimmen Sie das FlächenträgheitsmomentIzz.<br />
c) Bestimmen Sie die SchubspannungenτQ infolge der Querkraft Qy.<br />
d) Bestimmen Sie die Lage der maximalen Schubspannungenτ max<br />
Q infolge der QuerkraftQy.<br />
e) Wie groß darf die Exentrizitäte maximal sein, so dass die maximale Schubspannung den<br />
Betrag 10 N/cm 2 nicht übersteigt?<br />
Für diesen Aufgabenteil gelten die folgenden Annahmen:<br />
l = 10 cm, t = 1 cm, Q = 50 N, α = 60.<br />
Gegeben: l, Q, α = 60<br />
a) zS = 0 aus Symmetrie, a = 0,125l<br />
b) Izz = 5<br />
48 l3 t<br />
a<br />
α<br />
S<br />
z<br />
l
c) Schubfluss infolge Querkraft<br />
τ = QyS(y)<br />
Izzt<br />
<br />
SI(y) = ydA =<br />
ytds1 = 1<br />
4 s2 3<br />
1t− 8 ls1t<br />
day = s1cos60− 3<br />
8 l und s1 läuft von 0 bis l.<br />
S<strong>II</strong>(y) = 1<br />
4 l2t− 3<br />
8 l2 <br />
t+ ytds2<br />
= 1<br />
4 l2t− 3<br />
8 l2t+ 1<br />
8 ls2t<br />
day = 1/8l und s2 läuft von 0 bis l.<br />
Daraus folgt <strong>für</strong> die maximalen Schubspannungen:<br />
Si(y) ′ = 1/2s1 −3/8l = 0 ⇒ s1 = 3/4l<br />
d) exzentrische Querkraft ⇒ TorsionsmomentMT = −Qe<br />
τM = MT<br />
t IT = 4/3lt<br />
IT<br />
3<br />
Berechnung vone:<br />
τmax Q +τmax<br />
Qy<br />
M =<br />
Izzt<br />
e ≤ 0.866667<br />
τM = 3Qet<br />
4lt 3<br />
<br />
− 1 9<br />
416<br />
l2t+ 33<br />
84<br />
l2 <br />
t<br />
+ 3Qet<br />
≤ k<br />
4lt2
6. Aufgabe: (E<strong>TM</strong>, <strong>TM</strong><strong>II</strong>)<br />
A<br />
EA<br />
R<br />
C<br />
Das dargestellte Tragwerk besteht aus einem Bogenträger mit der BiegesteifigkeitEI und einem<br />
gelenkig verbundenen Stab mit der Dehnsteifigkeit EA. Der Stab ist in den Punkten A und C<br />
gelenkig mit dem Bogenträger verbunden. Im PunktB wirkt eine horizontale Kraft F .<br />
Bestimmen Sie<br />
a) alle Auflagerkräfte,<br />
b) die Stabkraft,<br />
c) die horizontale Verschiebung des PunktesB,<br />
d) <strong>für</strong> den Sonderfall eines dehnstarren Stabes (d.h. EA → ∞) und eines sehr weichen<br />
Stabes (d.h. EA → 0) die Verschiebung des PunktesB.<br />
Gegeben: R, F , EA, EI<br />
Anmerkung:<br />
Im Bogenträger sind nur Energieanteile infolge des Biegemoments zu berücksichtigen. Der<br />
Aufgabenteil d) kann auch ohne b) und c) gelöst werden.<br />
Hinweis:<br />
<br />
2 1 1<br />
sin (x)dx = x−<br />
2 4 sin(2x)<br />
R<br />
EI<br />
B<br />
F
a) Ax = −F, Ay = 0, B = 0<br />
b) S = R2 πA<br />
R 2 πA+4I F<br />
c) uB = R3 πF<br />
E<br />
<br />
1<br />
2I +<br />
2<br />
R2 <br />
πA+4I<br />
d) EA → 0 uB = R3 πF<br />
EI<br />
EA → ∞ uB = R3 πF<br />
2EI
7. Aufgabe: (E<strong>TM</strong>)<br />
l<br />
ω1<br />
y<br />
B<br />
A<br />
α<br />
Das dargestellte System besteht aus einem im Punkt A drehbar gelagerten Schwungrad und<br />
zwei Kurbeln. Die Kurbel B-C verbindet das Schwungrad mit der Kurbel C-D, dabei ist die<br />
KurbelC-D im PunktD drehbar gelagert. Das Schwungrad dreht sich mit der konstanten Winkelgeschwindigkeitω1.<br />
a) Zeichnen Sie die Richtung der Geschwindigkeiten VB und VC, sowie die Lage des Momentanpols<br />
der StangeB-C.<br />
b) Berechnen Sie die momentane Winkelgeschwindigkeiten der zwei Kurbeln ωBC = ω2<br />
und ωDC = ω3.<br />
c) Berechnen Sie die momentane Winkelbeschleunigungen der zwei Kurbeln ˙ωBC = ˙ω2 und<br />
˙ωDC = ˙ω3.<br />
Gegeben: l, ω1, α = 30 ◦ , β = 60 ◦ .<br />
2l<br />
C<br />
β<br />
D<br />
3<br />
2 l<br />
x
a)<br />
vB<br />
M b) vB =<br />
vC<br />
⎡<br />
0<br />
c) von A aus aB = ⎣−ω2<br />
⎤<br />
1 l⎦<br />
0<br />
⎡ ⎤<br />
−ω1l<br />
⎢ ⎥<br />
⎣ 0 ⎦<br />
0<br />
⎡ ⎤ ⎡<br />
−ω1l<br />
⎢ ⎥ ⎢<br />
vC = ⎣ 0 ⎦+ ⎣<br />
0<br />
ω2<br />
⎡<br />
3<br />
−ω3 ⎢<br />
vC = ⎢<br />
⎣<br />
√ 3<br />
l<br />
4<br />
3<br />
−ω3<br />
4 l<br />
⎤<br />
⎥<br />
⎦<br />
0<br />
ω2 l<br />
√ 3l<br />
0<br />
⎤<br />
√<br />
3<br />
ω2 = −<br />
4 ω3 ω3 = 2<br />
√ ω1<br />
3<br />
ω2 = − 1<br />
2 ω1<br />
⎡<br />
0<br />
von B aus aC = ⎣−ω2<br />
⎤ ⎡ ⎤ ⎡<br />
√<br />
˙ω2l<br />
1 l⎦+<br />
⎣ 3 ˙ω2 l⎦+<br />
⎣<br />
0 0<br />
−ω2 √ ⎤<br />
2 3 l<br />
⎦<br />
von D aus<br />
⎡<br />
3<br />
⎢−˙ω3<br />
⎢<br />
aC = ⎢<br />
⎣<br />
√ 3<br />
l<br />
4<br />
3<br />
−˙ω3<br />
4 l<br />
⎤<br />
⎥<br />
⎦<br />
0<br />
+<br />
⎡<br />
⎢<br />
⎣<br />
˙ω3 = 4 √ ω<br />
3 2 1 ˙ω2 = ω 2 √ <br />
3<br />
1 −2−<br />
4<br />
−ω 2 3<br />
3<br />
˙ω3<br />
4 l<br />
3 √ ⎤<br />
⎥<br />
3 ⎥<br />
l<br />
⎥<br />
4<br />
⎦<br />
0<br />
ω 2 2 l<br />
0<br />
⎥<br />
⎦ vonB aus<br />
vonD aus
8. Aufgabe: (E<strong>TM</strong> I)<br />
g<br />
m1<br />
ϕ2<br />
x1<br />
a<br />
m2, Θ2<br />
x3<br />
ϕ3<br />
r<br />
R<br />
m3, Θ3<br />
Die Masse m1 ist mit einem Seil, das über eine Walze(Massenträgheitsmoment bezüglich des<br />
SchwerpunktesΘ2, Massem2) und eine masselose Rolle umgelenkt wird, mit einer Rolle (Massenträgheitsmoment<br />
bezüglich des Schwerpunktes Θ3, Masse m3) verbunden. Das System befindet<br />
sich zunächst in Ruhe und rollt im weiteren ohne zu gleiten.<br />
a) Schneiden Sie das System vollständig frei und stellen Sie die kinematischen Beziehungen<br />
auf. Verwenden Sie die eingezeichneten Koordinaten.<br />
b) Bestimmen Sie die Beschleunigung ¨x1 der Masse m1 and die Beschleunigung ¨x3 der<br />
Massem3.<br />
c) Bestimmen Sie die Schwerpunktsgeschwindigkeit v3 der Rolle, wenn die Masse m1 die<br />
Strecke x1 = h zurückgelegt hat.<br />
Gegeben: g, a, r, R = 2r<br />
m, m1 = m3 = m, m2 = 4m<br />
Θ2 = m2<br />
2 a2 , Θ3 = m3<br />
2 R2
a)<br />
m 1 g<br />
S 1<br />
x1<br />
↓ : m1¨x1 = m1g −S1<br />
B : Θ2¨ϕ2 = S1a−S2a<br />
← : m3 ¨x3 = S2 −R3<br />
C : Θ3¨ϕ3 = −S2r +R3R<br />
Kinematik: ¨x1 = a¨ϕ2 ¨x1 = r¨ϕ3 ¨x3 = 2¨ϕ3<br />
b) ¨x1 = 1<br />
9 g ¨x3 = 2<br />
9 g<br />
c) v3 = 2<br />
2gh<br />
3<br />
S<br />
1<br />
ϕ<br />
B<br />
2<br />
a<br />
m2, Θ2 S<br />
2<br />
S 2<br />
x 3<br />
ϕ<br />
r<br />
N R<br />
3<br />
3<br />
m3, Θ3 R<br />
3