Klausur 06_1 - Lösungen
Klausur 06_1 - Lösungen
Klausur 06_1 - Lösungen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Fachhochschule Merseburg<br />
Fachbereich Maschinenbau<br />
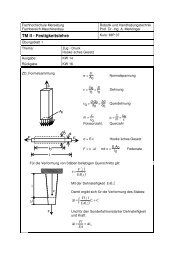
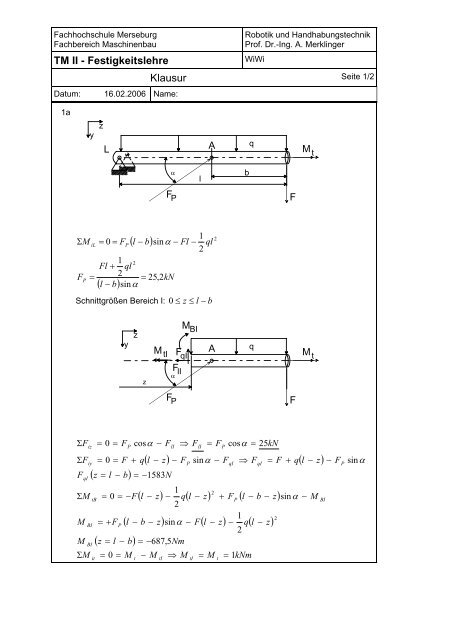
TM II - Festigkeitslehre<br />
<strong>Klausur</strong><br />
Datum: 16.02.20<strong>06</strong> Name:<br />
1a<br />
ΣM<br />
F<br />
P<br />
y<br />
iL<br />
=<br />
z<br />
L<br />
( l − b)<br />
α<br />
F P<br />
1<br />
= 0 = FP<br />
( l − b)<br />
sinα<br />
− Fl −<br />
2<br />
1 2<br />
Fl + ql<br />
2<br />
= 25,<br />
2kN<br />
sinα<br />
l<br />
A<br />
ql<br />
Schnittgrößen Bereich I: 0 ≤ z ≤ l − b<br />
ΣF<br />
ΣF<br />
F<br />
ΣM<br />
M<br />
M<br />
qI<br />
iz<br />
iy<br />
ΣM<br />
y<br />
F<br />
F<br />
( z = l − b)<br />
BI<br />
BI<br />
iB<br />
z<br />
= 0 = −F<br />
z<br />
M tI<br />
α<br />
F P<br />
F qI<br />
F lI<br />
M BI<br />
A<br />
2<br />
Robotik und Handhabungstechnik<br />
Prof. Dr.-Ing. A. Merklinger<br />
WiWi<br />
b<br />
q<br />
q<br />
F<br />
F<br />
M t<br />
M t<br />
( l − z)<br />
− F sinα<br />
− F ⇒ F = F + q(<br />
l − z)<br />
2<br />
( l − z)<br />
− q(<br />
l − z)<br />
+ F ( l − b − z)<br />
= + FP<br />
( l − b − z)<br />
sinα<br />
− F(<br />
l − z)<br />
− q(<br />
l − z)<br />
2<br />
( z = l − b)<br />
= −687,<br />
5Nm<br />
it<br />
= 0 =<br />
= 0 =<br />
= 0 =<br />
P<br />
M<br />
cosα<br />
−<br />
+<br />
q<br />
= −1583N<br />
t<br />
−<br />
M<br />
tI<br />
F<br />
lI<br />
1<br />
2<br />
⇒ F<br />
P<br />
⇒ M<br />
tI<br />
lI<br />
=<br />
=<br />
M<br />
F<br />
t<br />
P<br />
cosα<br />
= 25kN<br />
qI<br />
P<br />
1<br />
= 1kNm<br />
qI<br />
2<br />
sinα<br />
−<br />
M<br />
BI<br />
−<br />
F<br />
Seite 1/2<br />
P<br />
sinα
Fachhochschule Merseburg<br />
Fachbereich Maschinenbau<br />
TM II - Festigkeitslehre<br />
<strong>Klausur</strong><br />
Datum: 16.02.20<strong>06</strong> Name:<br />
a Schnittgrößen Bereich II l − b ≤ z ≤ l<br />
ΣF<br />
ΣF<br />
F<br />
ΣM<br />
M<br />
M<br />
qII<br />
iz<br />
iy<br />
ΣM<br />
= 0 = −F<br />
= 0 = F + q<br />
( z = l − b)<br />
BII<br />
BII<br />
iB<br />
it<br />
= 0 = −F<br />
Robotik und Handhabungstechnik<br />
Prof. Dr.-Ing. A. Merklinger<br />
WiWi<br />
z<br />
MBII y<br />
M tII FqII FlII q<br />
z<br />
( l − z)<br />
− F ⇒ F = F + q(<br />
l − z)<br />
( l − z)<br />
− q(<br />
l − z)<br />
= −F<br />
( l − z)<br />
− q(<br />
l − z)<br />
2<br />
( z = l − b)<br />
= −687,<br />
5Nm<br />
= 0 = M<br />
lII<br />
= 1750N<br />
t<br />
− M<br />
b) Linke Beschlagseite:<br />
c)<br />
σ<br />
τ<br />
max<br />
max<br />
− M<br />
=<br />
π<br />
=<br />
π<br />
1<br />
tII<br />
1<br />
2<br />
qII<br />
⇒ M<br />
( z = l − b)<br />
− ( d − 2s)<br />
2<br />
tII<br />
2<br />
qII<br />
= M<br />
− M<br />
t<br />
BII<br />
= 1kNm<br />
BI<br />
lI +<br />
4<br />
4<br />
2<br />
2<br />
( d<br />
) π ( d − ( d − 2s)<br />
)<br />
M<br />
16d<br />
32d<br />
N<br />
tI = 44,<br />
4<br />
4<br />
4<br />
2<br />
( d − ( d − 2s)<br />
) mm<br />
Rechte Beschlagseite:<br />
σ<br />
max<br />
B<br />
− M<br />
=<br />
π<br />
( z = l − b)<br />
− ( d − 2s)<br />
BII<br />
4<br />
4<br />
( d<br />
)<br />
32d<br />
=<br />
61,<br />
1<br />
4F<br />
N<br />
mm<br />
2<br />
=<br />
114,<br />
9<br />
M tII16d<br />
N<br />
τ max =<br />
= 44,<br />
4<br />
4<br />
4<br />
2<br />
π ( d − ( d − 2s)<br />
) mm<br />
σ B 300<br />
= ≈<br />
τ 175<br />
3 ⇒ GE-Hypothese: σ v =<br />
2<br />
σ max<br />
2<br />
+ 3τ<br />
Linke Beschlagseite:<br />
σ v =<br />
N<br />
138, 3<br />
mm<br />
2<br />
max<br />
F<br />
N<br />
mm<br />
2<br />
M t<br />
Rechte Beschlagseite:<br />
v = σ<br />
N<br />
98, 2<br />
mm<br />
2<br />
Seite 2/2