Download - Intel® Leibniz Challenge
Download - Intel® Leibniz Challenge
Download - Intel® Leibniz Challenge

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
02.04.2012<br />
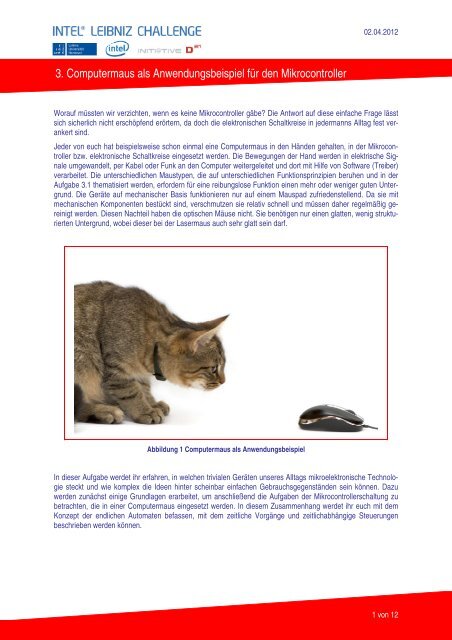
3. Computermaus als Anwendungsbeispiel für den Mikrocontroller<br />
Worauf müssten wir verzichten, wenn es keine Mikrocontroller gäbe? Die Antwort auf diese einfache Frage lässt<br />
sich sicherlich nicht erschöpfend erörtern, da doch die elektronischen Schaltkreise in jedermanns Alltag fest verankert<br />
sind.<br />
Jeder von euch hat beispielsweise schon einmal eine Computermaus in den Händen gehalten, in der Mikrocontroller<br />
bzw. elektronische Schaltkreise eingesetzt werden. Die Bewegungen der Hand werden in elektrische Signale<br />
umgewandelt, per Kabel oder Funk an den Computer weitergeleitet und dort mit Hilfe von Software (Treiber)<br />
verarbeitet. Die unterschiedlichen Maustypen, die auf unterschiedlichen Funktionsprinzipien beruhen und in der<br />
Aufgabe 3.1 thematisiert werden, erfordern für eine reibungslose Funktion einen mehr oder weniger guten Untergrund.<br />
Die Geräte auf mechanischer Basis funktionieren nur auf einem Mauspad zufriedenstellend. Da sie mit<br />
mechanischen Komponenten bestückt sind, verschmutzen sie relativ schnell und müssen daher regelmäßig gereinigt<br />
werden. Diesen Nachteil haben die optischen Mäuse nicht. Sie benötigen nur einen glatten, wenig strukturierten<br />
Untergrund, wobei dieser bei der Lasermaus auch sehr glatt sein darf.<br />
Abbildung 1 Computermaus als Anwendungsbeispiel<br />
In dieser Aufgabe werdet ihr erfahren, in welchen trivialen Geräten unseres Alltags mikroelektronische Technologie<br />
steckt und wie komplex die Ideen hinter scheinbar einfachen Gebrauchsgegenständen sein können. Dazu<br />
werden zunächst einige Grundlagen erarbeitet, um anschließend die Aufgaben der Mikrocontrollerschaltung zu<br />
betrachten, die in einer Computermaus eingesetzt werden. In diesem Zusammenhang werdet ihr euch mit dem<br />
Konzept der endlichen Automaten befassen, mit dem zeitliche Vorgänge und zeitlichabhängige Steuerungen<br />
beschrieben werden können.<br />
1 von 12
02.04.2012<br />
3.1 Von der Computermaus zu den endlichen Automaten I<br />
In der Computermaus bildet der Mikrocontroller das Herzstück eines Systems, das aus Sensoren, der Signalverarbeitung<br />
und Aktoren besteht. In diesem Aufgabenteil stehen die Grundlagen der Entwicklung von solchen Systemen<br />
im Vordergrund. Bevor die Entwicklung eines Systems beginnt, muss ein solches System analysiert werden,<br />
um sich anschließend mit den Details befassen zu können.<br />
1) Patentiert wurde das Prinzip der Computermaus von einem US-amerikanischen Computertechniker.<br />
Wann wurde das Patent erteilt und wie hieß dieser Techniker?<br />
2) Nennt zwei Typen von Computermäusen mit grundsätzlich verschiedenen Methoden der Abtastung<br />
des Untergrunds.<br />
3) Beschreibt in maximal drei Sätzen das Prinzip der Bewegungserfassung der Computermäuse.<br />
Hinweis: Berücksichtigt dabei die Methode der Abtastung vom Untergrund, von der ihr meint, sie sei<br />
am meisten verbreitet.<br />
Bei allen in Computermäusen verwendeten Methoden der Sensorik werden die aufgenommenen Informationen in<br />
digitale Signale gewandelt, mit denen ein Mikrocontroller Berechnungen durchführen kann. Diese Berechnungen<br />
erfolgen digital, sodass alle Informationen binär codiert werden müssen. Da Bewegungen der Computermaus in<br />
unterschiedliche Richtungen verarbeitet werden, müssen neben den positiven Zahlen auch negative Zahlen codiert<br />
werden.<br />
4) Führt die Operation 8 + 9 = 17 im binären Zahlensystem schriftlich durch.<br />
5) Führt die Operation 7 - 10 = -3 im binären Zahlensystem schriftlich durch.<br />
Hinweis: Verwendet das Zweierkomplement für die Subtraktion.<br />
Wie in den vorangegangenen Aufgaben deutlich wird, können mathematische Operationen, die der Mensch für<br />
gewöhnlich im dezimalen Zahlensystem durchführt, auch im binären Zahlensystem berechnet werden. Dieses<br />
Zahlensystem ist die Domäne der Mikrocontroller und digitaler Schaltungen, da sie nur mit zwei Werten arbeiten.<br />
Solche Schaltungen realisieren unter anderem die bereits erwähnte Signalverarbeitung der Computermaus und<br />
können allgemein für Steuerungsaufgaben verwendet werden.<br />
Da solche Steuerungsaufgaben einen zeitlichen Verlauf (zeitliche Abhängigkeit) haben, wird oft für die Beschreibung<br />
das Konzept der endlichen Automaten („finite state machine“, „Zustandsautomaten“) verwendet. Die endlichen<br />
Automaten ermöglichen die Modellierung des zeitlichen Verhaltens einer Steuerung unter der Berücksichtigung<br />
der Eingaben, die vom Benutzer bzw. der Umgebung erzeugt werden. Zusätzlich ist es möglich, durch die<br />
endlichen Automaten eine Ausgabe zu generieren, um so dem Benutzer Informationen zu liefern und die Umgebung<br />
zu beeinflussen. Die Bezeichnung „endliche Automaten“ basiert auf der Tatsache, dass damit modellierte<br />
Steuerungen eine endliche Anzahl an Zuständen aufweisen. Bei der Modellierung ist es möglich, zwei Arten von<br />
endlichen Automaten zu verwenden: Moore-Automaten und Mealy-Automaten.<br />
2 von 12
02.04.2012<br />
3.1 Von der Computermaus zu den endlichen Automaten II<br />
6) Beschreibt in maximal zwei Sätzen den Unterschied zwischen einem Moore- und einem Mealy-<br />
Automaten.<br />
7) Welche Teile von der Computermaus dienen als Eingabe, wenn ihr die Computermaus als einen endlichen<br />
Automaten betrachtet? Was ist die Ausgabe dieses Automaten?<br />
Bis zu diesem Zeitpunkt wurden die endlichen Automaten als theoretisches Konzept betrachtet. Nun soll die<br />
technische Realisierung thematisiert werden. Die Realisierung des endlichen Automaten verfügt zunächst über<br />
Eingangssignale (Eingabe) und Ausgangssignale (Ausgabe) sowie einen Zustandsspeicher. In dem Zustandsspeicher<br />
wird der aktuelle Zustand gespeichert. Der Wechsel der Zustände, der als Zustandsübergang bezeichnet<br />
wird, erfolgt ausschließlich zu festgelegten Zeitpunkten. Diese Zeitpunkte werden durch ein Taktsignal (clock,<br />
clk) vorgegeben. Bei den folgenden zwei Aufgaben werden alle Eingangssignale zu einem Signal „X“ und alle<br />
Ausgangssignale zu einem Signal „Y“ zusammengefasst. Der aktuelle Zustand wird als „Z“ bezeichnet. Überdies<br />
wird noch ein Folgezustand „Z’“ benötigt, der bei der nächsten Flanke des Taktsignals „clk“ eingenommen wird.<br />
Bei der Flanke handelt es sich um einen Wechsel des Wertes vom Taktsignal, der von „0“ auf „1“ (positive bzw.<br />
steigende Flanke) oder von „1“ auf „0“ (negative bzw. fallende Flanke) erfolgt.<br />
8) Vervollständigt das untenstehende Blockschaltbild eines Moore-Automaten.<br />
9) Erklärt die jeweilige Aufgabe des Schaltnetzes A und B in jeweils maximal zwei Sätzen.<br />
10) Ergänzt (in einem zweiten Bild) das Blockschaltbild des Moore-Automaten, sodass ein Mealy-Automat<br />
entsteht.<br />
X<br />
Schaltnetz A<br />
Zustandsspeicher<br />
Z<br />
Schaltnetz B<br />
clk<br />
Form der Lösung für den Aufgabenteil 3.1<br />
Abbildung 2 Realisierung eines endlichen Automaten<br />
- Antworten auf die Fragen 1 - 3<br />
- Schriftliche Addition bzw. Subtraktion im binären Zahlensystem als Antworten auf die Fragen 4 und 5<br />
- Antworten auf die Fragen 6 und 7<br />
- Vervollständigtes Blockschaltbild eines Moore-Automaten als Antwort auf Frage 8<br />
- Antwort auf die Frage 9<br />
- Vervollständigtes Blockschaltbild eines Mealy-Automaten als Antwort auf Frage 10<br />
3 von 12
02.04.2012<br />
3.2 Opto-mechanische Computermaus I<br />
Gegenstand dieser Aufgabe ist das Prinzip einer opto-mechanischen Maus. Aufbauend auf der Aufgabe 3.1 sollt<br />
ihr einen endlichen Automaten entwerfen, der die Bewegungserfassung dieser Mausart modelliert (beschreibt).<br />
Abgeschlossen wird diese Aufgabe mit der konkreten Berechnung von einigen physikalischen Parametern der<br />
Computermaus.<br />
In Abbildung 3 ist das Innere eines geöffneten Mausgehäuses dargestellt. Fast in der Mitte des Untergehäuses<br />
angeordnet, könnt ihr sehr gut die Gummikugel erkennen (Position 1), die ein signifikantes Bauteil dieses Maustyps<br />
darstellt. Links daneben und oberhalb (Position 2) von ihr sind die Walzen mit den Lochscheiben und Lichtschranken<br />
zu sehen. Die Lichtschranke besteht aus einer LED und einer Fotodiode (Position 3). Zentral auf der<br />
Platine befindet sich der Mikrocontroller, der die Signalverarbeitung realisiert. Die Taster (Position 4) dienen als<br />
Maustasten.<br />
Abbildung 3 Opto-mechanische Computermaus 1<br />
Die genaue Funktionsweise der opto-mechanischen Bewegungserfassung einer Computermaus wird durch Abbildung<br />
4 dargestellt. Die durch die Gummikugel bewegten Walzen bewegen gleichzeitig die Lochscheiben, die<br />
mit Löchern bzw. Schlitzen versehen sind. Die Lochscheiben unterbrechen den Lichtstrahl einer LED, der durch<br />
die Fotodioden empfangen wird.<br />
Abbildung 4 Funktionsprinzip der opto-mechanischen Computermaus 2<br />
1 Quelle: http://de.wikipedia.org; Autor: Sador<br />
2 Quelle: http://en.wikipedia.org; Autoren: Jeremykemp und Pbroks13<br />
4 von 12
02.04.2012<br />
3.2 Opto-mechanische Computermaus II<br />
Durch das Zusammenspiel der parallel angeordneten LED und von zwei Fotodioden entsteht eine Lichtschranke,<br />
mit der die Drehrichtung und die Drehgeschwindigkeit erkannt werden können. Das Schema einer solchen Lichtschranke<br />
sowie die möglichen Abtastpunktkombinationen bei einer Drehbewegung werden in Abbildung 5 dargestellt.<br />
Die Schlitze, die das LED-Licht durchlassen sollen, sind rot markiert. Die fest angeordneten Fotodioden<br />
FD1 und FD2 werden durch die Lampensymbole angedeutet.<br />
Abbildung 5 Schematische Darstellung der Lochscheibe (Zustand A)<br />
Durch eine Drehung der Lochscheibe und bedingt durch die aktuelle Position der Schlitze können entweder beide<br />
Fotodioden, abwechselnd nur eine, oder gar keine bedeckt sein. In Abbildung 5 werden beide Fotodioden als<br />
gerade bedeckt dargestellt. Insgesamt ergeben sich durch die Drehung genau vier mögliche Kombinationen.<br />
1) Stellt die vier möglichen Stellungen der Schlitze über den Fotodioden FD1 und FD2 bei einer Linksdrehung<br />
der Lochscheibe dar. Vervollständigt dafür Tabelle 1.<br />
Hinweis: Verwendet den Ausgangssignalwert „AUS“ für den Fall, in dem die jeweilige Fotodiode durch<br />
das Rad verdeckt wird und den Ausgangssignalwert „AN“ für den Fall, in dem die jeweilige Fotodiode<br />
durch den Schlitz angeleuchtet wird (vgl. Abbildung 5). Der bereits dargestellte Zustand „A“ beschreibt<br />
die Stellung des Rades, in der beide Fotodioden durch das Rad verdeckt werden.<br />
2) Stellt die vier möglichen Stellungen der Schlitze über den Fotodioden FD1 und FD2 bei einer Rechtsdrehung<br />
der Lochscheibe dar. Vervollständigt dafür Tabelle 2.<br />
Hinweis: Verwendet die identischen Bezeichnungen für die Ausgangssignalwerte („AUS“ und „AN“)<br />
und die identischen Zustandsbezeichnungen („A“-„D“) für die jeweiligen Konstellationen der Ausleuchtung<br />
von Fotodioden.<br />
5 von 12
02.04.2012<br />
3.2 Opto-mechanische Computermaus III<br />
Tabelle 1 Zustand der Fotodioden bei einer Linksdrehung (Vorlage für die Lösung)<br />
Zustand A B C D<br />
FD1<br />
FD2<br />
AUS<br />
AUS<br />
Tabelle 2 Zustand der Fotodioden bei einer Rechtsdrehung (Vorlage für die Lösung)<br />
Zustand<br />
FD1<br />
FD2<br />
AUS<br />
AUS<br />
Während die Tabelle 1 und Tabelle 2 die möglichen Kombinationen darstellen, soll nun der endliche Automat<br />
„Bewegungserfassung der Computermaus“ betrachtet werden. Die Fotodioden FD1 und FD2 stellen die Eingangssignale<br />
dar. Seine Ausgabe soll im Folgenden vernachlässigt werden. Für die Darstellung des endlichen<br />
Automaten wird hier ein sogenanntes Zustandsübergangsdiagramm verwendet.<br />
3) Vervollständigt das Zustandsübergangsdiagramm für die Computermaus in folgender Abbildung.<br />
Hinweis: Verwendet eine „0“ für den Ausgangssignalwert der Fotodiode „AUS“, eine „1“ für den Ausgangssignalwert<br />
der Fotodiode „AN“ und ein „X“ für einen Ausgangssignalwert der Fotodiode, der keine<br />
Rolle für den jeweiligen Zustandsübergang spielt. (Mit einem „X“ bzw. "don't care" werden in der<br />
Digitaltechnik allgemein Werte bezeichnet, bei denen es an der betrachteten Stelle egal ist, ob ein Signal<br />
den Wert „0“ oder „1“ aufweist.<br />
FD1/FD2 = ?/0<br />
FD1/FD2 = ?/0<br />
Zustand<br />
?<br />
FD1/FD2 = ?/?<br />
FD1/FD2 = ?/?<br />
Zustand<br />
A<br />
FD1/FD2 = ?/?<br />
FD1/FD2 = ?/0<br />
FD1/FD2 = ?/?<br />
FD1/FD2 = X/?<br />
Zustand<br />
?<br />
FD1/FD2 = 0/?<br />
FD1/FD2 = ?/?<br />
FD1/FD2 = 1/?<br />
Zustand<br />
?<br />
FD1/FD2 = ?/?<br />
Abbildung 6 Unvollständiges Zustandsübergangsdiagramm einer Computermaus<br />
6 von 12
02.04.2012<br />
3.2 Opto-mechanische Computermaus IV<br />
Nicht nur die Funktion einer opto-mechanischen Computermaus ist von Bedeutung. Auch hinsichtlich ihrer physikalischen<br />
Parameter kann zwischen leistungsschwachen und leistungsstarken Computermäusen unterschieden<br />
werden. Zu diesen Parametern gehören unter anderem die Auflösung, die Mausgeschwindigkeit und die Baudrate.<br />
Die Auflösung der Computermaus, die bei den folgenden Fragen betrachtet wird, wird durch mechanische Abmessungen<br />
der Gummikugel, der Walze und des Rades bestimmt. In der Elektromechanik wird die Auflösung oft<br />
in dpi (dots per inch) angegeben. Inch ist eine Längeneinheit, die im englischsprachigen Raum Anwendung findet.<br />
Typische Werte für opto-mechanische Mäuse liegen im Bereich zwischen 400 dpi und 800 dpi. Höhere Werte<br />
sind aufgrund des mechanischen Aufbaus nur schwierig möglich. Um höhere Werte zu erreichen, werden andere<br />
Typen von Computermäusen eingesetzt. Unter dem Begriff Mausgeschwindigkeit wird die maximale Bewegungsgeschwindigkeit<br />
verstanden, mit der die Maus bewegt werden kann, ohne dass der Cursor auf dem Bildschirm zu<br />
springen anfängt. Dies hängt damit zusammen, wie schnell die Signalverarbeitung die Impulse der Fotodioden<br />
abtasten und verarbeiten kann. Die Baudrate gibt an, mit welcher Geschwindigkeit die Computermaus die Informationen<br />
an den PC übertragen kann.<br />
Um die Auflösung der Computermaus zu bestimmen, muss zunächst die Anzahl der Schlitze vom Rad bestimmt<br />
werden. Wie bereits dargestellt, werden durch das Rad zwei Fotodioden beeinflusst. Dies bedeutet, dass für die<br />
Berechnung der Auflösung pro Schlitz zwei Datenpunkte berücksichtigt werden müssen. Selbstverständlich müssen<br />
auch die Speichen des Rades bei der Berechnung berücksichtigt werden.<br />
Eine ganze Umdrehung des Rades wird dadurch erkannt, dass sich die mechanische Walze genau einmal um<br />
ihre Achse dreht. Die Auflösung ergibt sich somit aus der Anzahl der berechneten Datenpunkte, die durch den<br />
Umfang der Rolle geteilt werden. Im folgenden Beispiel hat die Walze einen Durchmesser von 2,547 mm und auf<br />
dem Rad sind 48 Schlitze angebracht.<br />
4) Berechnet die Anzahl der zur Verfügung stehenden Datenpunkte für das oben dargestellte Beispiel.<br />
5) Gebt die Auflösung der Maus in der Einheit dpi an.<br />
6) Berechnet die Wegstrecke, die zurückgelegt wird, wenn sich die Walze durch die Mausbewegung 4,2-<br />
mal um ihre Achse dreht.<br />
7) Berechnet den Weg des Mauszeigers auf dem Bildschirm, wenn das Auflösungsverhältnis 1 zu 4 ist.<br />
Form der Lösung für den Aufgabenteil 3.2<br />
- Vervollständigte Tabelle 1 bzw. Tabelle 2 als Antwort auf die Frage 1 bzw. 2<br />
- Vervollständigtes Zustandsübergangsdiagramm als Antwort auf die Frage 3<br />
- Antworten auf die Fragen 4 - 7<br />
7 von 12
02.04.2012<br />
3.3 Taster der Computermaus I<br />
Zur Interaktion mit einem Computer muss die Computermaus nicht nur Bewegungsinformationen übermitteln,<br />
sondern dem Benutzer auch andere Eingabemöglichkeiten zur Verfügung stellen. Für alle „Klick“-Eingaben haben<br />
Computermäuse mindestens zwei Tasten. Diese zusätzlichen Informationen müssen ebenfalls von dem<br />
Mikrocontroller der Computermaus verarbeitet und an den Computer weitergeleitet werden.<br />
Wie ihr bereits in Aufgabe 2 der Intel ® <strong>Leibniz</strong> <strong>Challenge</strong> 2012 erfahren habt, haben Taster die unerwünschte<br />
Eigenschaft, die als „Prellen“ bezeichnet wird. Der zeitliche Verlauf der Spannung U Taster , die an einem Taster<br />
gemessen werden kann, ist in der folgenden Abbildung dargestellt. Zum Zeitpunkt t 0 wird dabei der Taster gedrückt<br />
und zum Zeitpunkt t 1 losgelassen.<br />
UTaster<br />
t0<br />
Abbildung 7 Prellen eines Tasters<br />
t1<br />
t<br />
1) Warum ist das Prellen eines Tasters ein Problem für den Mikrocontroller?<br />
2) Beschreibt in einem Satz, wie ein Taster in Software „entprellt“ werden kann?<br />
3) Beschreibt in maximal drei Sätzen, warum das Entprellen der Taster für die fehlerfreie Verwendung<br />
der Maus erforderlich ist?<br />
Hinweis: Denkt an die zu unterscheidenden Funktionen der Computermaustasten.<br />
Das Entprellen von Tastern kann mehrere Millisekunden (ms) in Anspruch nehmen, wobei die Dauer von dem<br />
mechanischen Aufbau des jeweiligen Tasters abhängig ist. In den folgenden zwei Fragen wird ein Taster betrachtet,<br />
der 10 ms benötigt, um einen stabilen Zustand zu erreichen.<br />
4) Wie viele Tastendrücke kann der beschriebene Taster pro Sekunde registrieren? Welcher Frequenz<br />
entspricht das?<br />
5) Nennt zwei Gründe, warum eine solche Frequenz für einen realen Computermaustaster nicht realistisch<br />
ist.<br />
8 von 12
02.04.2012<br />
3.3 Taster der Computermaus II<br />
Neben der bereits betrachteten Möglichkeit, einen Taster in Software zu entprellen, gibt es elektronische Schaltungen,<br />
um einen Tastendruck in Hardware zu entprellen. Die zusätzliche Hardware vereinfacht die Programmierung<br />
des Mikrocontrollers mit Tastern stark, da nun von einem idealen Taster ohne Prellen ausgegangen werden<br />
kann.<br />
6) Beschreibt in maximal drei Sätzen die Möglichkeit einen Taster mit einem RS-Flipflop zu entprellen.<br />
Fertigt dazu ein Schaltbild mit NOR-Gattern an.<br />
7) Zeichnet ein Zustandsübergangsdiagramm für einen endlichen Automaten, der einen Taster entprellt.<br />
Hinweis: Der Zustand, in dem ein Tastendruck eindeutig erkannt wurde, soll mit „KLICK“ bezeichnet<br />
werden.<br />
8) Zeichnet ein Zustandsübergangsdiagramm für einen endlichen Automaten, der eine Computermaus<br />
mit zwei Tasten beschreibt. Das Entprellen der Taster soll selbstverständlich berücksichtigt werden.<br />
Hinweis: Die Zustände, in denen ein jeweiliger Tastendruck eindeutig erkannt wurde, sollen mit<br />
„KLICK_1“ und „KLICK_2“ bezeichnet werden.<br />
Form der Lösung für den Aufgabenteil 3.3<br />
- Antworten auf die Fragen 1 - 5<br />
- Beschreibung und Schaltbild des Entprellens eines Tasters mit einem RS-Flipflop als Antwort auf die<br />
Frage 6<br />
- Jeweils ein Zustandsübergangsdiagramm als Antwort auf die Frage 7 und 8<br />
9 von 12
02.04.2012<br />
3.4 Kommunikation der Computermaus mit dem PC I<br />
In den vorausgegangenen Aufgabenteilen stand die Computermaus mit der Signalverarbeitung und ihren Sensoren<br />
im Vordergrund. Damit die Computermaus nun endlich als Eingabegerät für den PC nutzbar ist, muss sie die<br />
Bewegungsinformationen und die Tasteneingaben an den PC übermitteln. Dies geschieht mittels serieller Kommunikation,<br />
die über Kabel oder kabellos erfolgt, wobei an dieser Stelle ausschließlich die kabelgebundene<br />
Kommunikation betrachtet wird. Die Kommunikation mit dem PC findet mithilfe eines genormten Protokolls statt.<br />
1) Was zeichnet die serielle Kommunikation aus? Erläutert in maximal zwei Sätzen das Konzept jeder<br />
seriellen Kommunikation.<br />
2) Begründet in maximal zwei Sätzen die Notwendigkeit der Verwendung von genormten Kommunikationsprotokollen.<br />
Bei der Entwicklung der Computermäuse wurden in den vergangenen Jahren insbesondere drei Anschlussarten<br />
verwendet. Die ersten Computermäuse verfügten über RS-232-Anschlüsse, die später von PS/2-Anschlüssen<br />
ersetzt wurden. Heutzutage sind diese Anschlüsse größtenteils von USB-Anschlüssen verdrängt worden. In den<br />
folgenden Fragen soll zunächst das PS/2-Protokoll für eine Computermaus mit drei Tasten und ohne Mausrad<br />
betrachtet werden (vgl. http://www.uni-koblenz.de/~physik/informatik/ECC/ps2.pdf).<br />
3) Welche Ereignisse (Vorkommen) können bei der Computermaus die Kommunikation mit dem PC auslösen?<br />
Nennt zwei solche Ereignisse.<br />
Das PS/2-Protokoll sieht ein Vorzeichen und Überlauf-Bit (overflow bit) vor.<br />
4) Begründet in einem Satz die Notwendigkeit des Vorzeichens bei der Kommunikation mit dem PC.<br />
5) Begründet in einem Satz die Notwendigkeit des Überlauf-Bits bei der Kommunikation mit dem PC. Wie<br />
würde sich das Fehlen des Überlauf-Bits bei der Kommunikation für den Computermausbenutzer bemerkbar<br />
machen?<br />
Nun soll ein Moore-Automat entworfen werden, der die Datenübertragung steuern kann. Geht davon aus, dass<br />
der Automat pro Zustand genau ein Byte an Daten übermitteln kann! Die Computermaus sendet dabei regelmäßig<br />
Daten an den PC. Sollten keine neuen Informationen vorliegen, so soll die Computermaus ein „leeres“ Byte<br />
übermitteln (00000000).<br />
6) Erstellt mithilfe der Protokollspezifikation eine Tabelle, die die Ausgabe des Automaten den einzelnen<br />
Zuständen zuordnet.<br />
Hinweis: Verwendet die Tabelle 3 als Vorlage für die Lösung.<br />
7) Zeichnet das Zustandsübergangsdiagramm für den Automaten, den ihr in der Frage 6 beschrieben<br />
habt.<br />
Hinweis: Denkt daran, die Übergänge zwischen den Zuständen mit der Eingabe des Automaten zu<br />
verknüpfen.<br />
10 von 12
02.04.2012<br />
3.4 Kommunikation der Computermaus mit dem PC II<br />
Zustand<br />
IDLE<br />
Byte_1<br />
Byte_2<br />
Byte_3<br />
Tabelle 3 Zuordnung der Zustände (Vorlage für die Lösung)<br />
zu übertragenden Daten<br />
D7 D6 D5 D4 D3 D2 D1 D0<br />
Bei der letzten Frage soll die USB-Schnittstelle betrachtet werden. Da USB ein Format ist, das von vielen verschiedenen<br />
Geräten benutzt wird, müssen neu-angeschlossene Geräte einen Deskriptor mit ihren Daten an den<br />
PC senden. Der Deskriptor kann als eine Visitenkarte gesehen werden, die die Computermaus zur Vorstellung<br />
einmal an den PC sendet. Hier teilt sie dem PC mit, wer sie ist und was sie kann. Das Format, das sie dazu verwendet,<br />
nennt sich HID-USB (Human Interface Device) und ist in Abbildung 8 unvollständig dargestellt.<br />
8) Wie könnte ein solcher Deskriptor für eine Computermaus aufgebaut sein, wenn sie sechs Taster und<br />
ein Mausrad besitzt, sowie eine sehr hohe Geschwindigkeit in x- und y-Richtung unterstützt?<br />
Hinweis: Ihr dürft für die Erstellung des Deskriptors das Programm (http://www.usb.org/developers/hidpage/dt2_4.zip)<br />
benutzen. Es ist zudem empfehlenswert, den Beispiel-Deskriptor auf Seite 25<br />
in http://www.usb.org/developers/devclass_docs/HID1_11.pdf zu betrachten.<br />
USAGE_PAGE (Generic Desktop) 05 01<br />
USAGE (Mouse) 09 02<br />
COLLECTION (Application) A1 01<br />
USAGE (Pointer) 09 01<br />
COLLECTION (Physical) A1 00<br />
…<br />
END_COLLECTION<br />
C0<br />
END_COLLECTION<br />
C0<br />
Abbildung 8 Unvollständiger Deskriptor<br />
Form der Lösung für den Aufgabenteil 3.4<br />
- Antworten auf die Fragen 1 - 5<br />
- Ausgefüllte Tabelle 3 als Antwort auf die Frage 6<br />
- Zustandsübergangsdiagramm als Antwort auf die Frage 7<br />
- Deskriptor für eine USB-Computermaus als Antwort auf die Frage 8<br />
11 von 12
02.04.2012<br />
Wichtige Informationen<br />
Falls ihr Fragen zu den Aufgaben habt oder eine Hilfestellung benötigt, so schaut doch einfach in unser Forum:<br />
http://www.intel-leibniz-challenge.de/forum/<br />
Abgabe der Lösungen:<br />
Wo:<br />
Wie:<br />
www.intel-leibniz-challenge.de/portal<br />
Genauigkeit der Lösungen<br />
Falls nicht anders gefordert, gebt bei den Lösungen maximal drei signifikante Stellen an<br />
(z. B. 1,52 mA, 42,1 kW, 123 V etc.)!<br />
Form der Abgabe und Dateibenennung:<br />
Für jeden Aufgabenteil soll nur eine Datei abgegeben werden. Falls mehrere Dateien<br />
vorhanden sind, müssen sie in eine zip-Datei gepackt werden. Die Datei muss wie folgt<br />
benannt werden:<br />
Gruppenname_Aufgabe_Teilaufgabe.zip<br />
Für die Abgabe der Aufgabe 3.1 müsste die „Muster Gruppe“ folgende Datei hochladen:<br />
MusterGruppe_3_1.zip<br />
Verwendet bitte keine Leerzeichen und Sonderzeichen in den Dateinamen!<br />
Zulässige Dateiformate:<br />
Textformate:<br />
PDF mit eingebetteten Bildern, txt<br />
Bildformate:<br />
jpg, bmp, png, wmf<br />
Videoformate: flv, avi, mpg, ogg<br />
Audioformate: mp3, wma, wav, ogg<br />
Dateigrößen und Dateiinhalt<br />
Die Dateien sollten nicht größer als 7,5 MB sein! Bitte gebt in der Datei (nicht im<br />
Dateinamen) auch euren Teamnamen, die Namen der Gruppenmitglieder sowie deren<br />
Schulen an. Erzeugt dafür eine zusätzliche Textdatei!<br />
Wann:<br />
Hinweis:<br />
Bis zum 06.05.2012 um 23:59 Uhr.<br />
Um sicherzugehen, dass eure Dateien wirklich fehlerfrei und für die Korrektoren zu<br />
öffnen sind, solltet ihr eure Zip-Dateien nochmals von eurem Account runterladen und<br />
öffnen. Dateien, die sich nicht öffnen lassen, können nicht bewertet werden!<br />
Die AGB und weitere Informationen findet ihr unter: www.intel-leibniz-challenge.de<br />
Der Rechtsweg ist ausgeschlossen!<br />
12 von 12