

F-206.S HexAlign™ 6 Achsen-Hexapod (PDF) - PI
F-206.S HexAlign™ 6 Achsen-Hexapod (PDF) - PI
F-206.S HexAlign™ 6 Achsen-Hexapod (PDF) - PI

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Piezo • Nano • Positioning<br />
F-<strong>206.S</strong> HexAlign 6 <strong>Achsen</strong>-<strong>Hexapod</strong><br />
Parallelkinematik-Mikrojustiersystem / Mikromanipulator, mit Controller<br />
© Physik Instrumente (<strong>PI</strong>) GmbH & Co. KG 2009. Änderungen vorbehalten. Dieses Datenblatt verliert seine Gültigkeit mit Erscheinen einer neuen Revision.<br />
Die jeweils aktuelle Revision ist unter www.pi.ws zum Herunterladen verfügbar. Cat120D Inspirationen2009 09/02.10<br />
Parallelkinematik mit sechs Freiheitsgraden<br />
Aktorauflösung 0,033 µm<br />
Wiederholbarkeit 0,3 µm<br />
Keine bewegten Kabel: Höhere Zuverlässigkeit, reduzierte<br />
Reibung<br />
Wesentlich kompakter und steifer als Seriellkinematik-<br />
Systeme, höhere Dynamik<br />
Zum Scannen und Justieren<br />
Vektorsteuerung mit virtuellem Pivotpunkt<br />
Leistungsfähiger Controller mit Open-Source LabVIEW-<br />
Treibern und DLL-Bibliotheken<br />
Integrierte Faserkoppelroutinen<br />
Anwendungsbeispiele<br />
Mikrobearbeitung<br />
Photonik<br />
Faserkopplung<br />
Halbleiter-Testsysteme<br />
Mikromanipulation (Life-<br />
Science)<br />
Optische Testaufbauten<br />
Justage von Kollimatoren<br />
und Faserbündeln<br />
MEMS-Justage<br />
4-12<br />
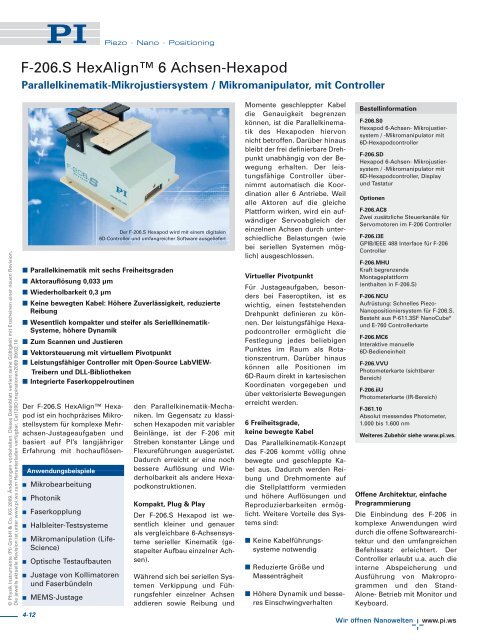
Der F-<strong>206.S</strong> <strong>Hexapod</strong> wird mit einem digitalen<br />
6D-Controller und umfangreicher Software ausgeliefert<br />
Der F-<strong>206.S</strong> HexAlign Hexa -<br />
pod ist ein hochpräzises Mikro -<br />
stellsystem für komplexe Mehr -<br />
achsen-Justageaufgaben und<br />
basiert auf <strong>PI</strong>’s langjähriger<br />
Erfahrung mit hochauflösenden<br />
Parallelkinematik-Me cha -<br />
niken. Im Gegensatz zu klassischen<br />
<strong>Hexapod</strong>en mit variabler<br />
Beinlänge, ist der F-206 mit<br />
Streben konstanter Länge und<br />
Flexureführungen ausgerüstet.<br />
Dadurch erreicht er eine noch<br />
bessere Auf lösung und Wie -<br />
der holbarkeit als andere Hexa -<br />
pod konstruk tionen.<br />
Kompakt, Plug & Play<br />
Der F-<strong>206.S</strong> <strong>Hexapod</strong> ist we -<br />
sentlich kleiner und genauer<br />
als vergleichbare 6-<strong>Achsen</strong> sys -<br />
teme serieller Kinematik (ge-<br />
sta pelter Aufbau einzelner Ach -<br />
sen).<br />
Während sich bei seriellen Sys -<br />
temen Verkippung und Füh -<br />
rungs fehler einzelner <strong>Achsen</strong><br />
ad dieren sowie Reibung und<br />
Momente geschleppter Kabel<br />
die Genauigkeit begrenzen<br />
kön nen, ist die Parallel kine ma -<br />
tik des <strong>Hexapod</strong>en hiervon<br />
nicht betroffen. Darüber hinaus<br />
bleibt der frei definierbare Drehpunkt<br />
unabhängig von der Be -<br />
wegung erhalten. Der leis -<br />
tungs fähige Controller übernimmt<br />
automatisch die Ko or -<br />
dination aller 6 Antriebe. Weil<br />
alle Aktoren auf die gleiche<br />
Plattform wirken, wird ein aufwändiger<br />
Servoabgleich der<br />
einzelnen <strong>Achsen</strong> durch unterschiedliche<br />
Belastungen (wie<br />
bei seriellen Systemen möglich)<br />
ausgeschlossen.<br />
Virtueller Pivotpunkt<br />
Für Justageaufgaben, be son -<br />
ders bei Faseroptiken, ist es<br />
wichtig, einen feststehenden<br />
Dreh punkt definieren zu kön -<br />
nen. Der leistungsfähige Hexa -<br />
podcontroller ermöglicht die<br />
Festlegung jedes beliebigen<br />
Punktes im Raum als Ro ta -<br />
tionszentrum. Darüber hinaus<br />
können alle Positionen im<br />
6D-Raum direkt in kartesischen<br />
Koordinaten vorgegeben und<br />
über vektorisierte Bewegungen<br />
erreicht werden.<br />
6 Freiheitsgrade,<br />
keine bewegte Kabel<br />
Das Parallelkinematik-Konzept<br />
des F-206 kommt völlig ohne<br />
bewegte und geschleppte Ka -<br />
bel aus. Dadurch werden Rei -<br />
bung und Drehmomente auf<br />
die Stellplattform vermieden<br />
und höhere Auflösungen und<br />
Reproduzierbarkeiten ermög -<br />
licht. Weitere Vorteile des Sys -<br />
tems sind:<br />
Keine Kabelführungs -<br />
systeme notwendig<br />
Reduzierte Größe und<br />
Massenträgheit<br />
Höhere Dynamik und besseres<br />
Einschwingverhalten<br />
Bestellinformation<br />
F-<strong>206.S</strong>0<br />
<strong>Hexapod</strong> 6-<strong>Achsen</strong>- Mikro justier -<br />
system / -Mikromanipulator mit<br />
6D-<strong>Hexapod</strong>controller<br />
F-<strong>206.S</strong>D<br />
<strong>Hexapod</strong> 6-<strong>Achsen</strong>- Mikrojustier -<br />
system / -Mikromanipulator mit<br />
6D-<strong>Hexapod</strong>controller, Display<br />
und Tastatur<br />
Optionen<br />
F-206.AC8<br />
Zwei zusätzliche Steuerkanäle für<br />
Servomotoren im F-206 Controller<br />
F-206.i3E<br />
G<strong>PI</strong>B/IEEE 488 Interface für F-206<br />
Controller<br />
F-206.MHU<br />
Kraft begrenzende<br />
Montageplattform<br />
(enthalten in F-<strong>206.S</strong>)<br />
F-206.NCU<br />
Aufrüstung: Schnelles Piezo-<br />
Nanopositioniersystem für F-<strong>206.S</strong>.<br />
Besteht aus P-611.3SF NanoCube ®<br />
und E-760 Controllerkarte<br />
F-206.MC6<br />
Interaktive manuelle<br />
6D-Bedieneinheit<br />
F-206.VVU<br />
Photometerkarte (sichtbarer<br />
Bereich)<br />
F-206.iiU<br />
Photometerkarte (IR-Bereich)<br />
F-361.10<br />
Absolut messendes Photometer,<br />
1.000 bis 1.600 nm<br />
Weiteres Zubehör siehe www.pi.ws.<br />
Offene Architektur, einfache<br />
Programmierung<br />
Die Einbindung des F-206 in<br />
kom plexe Anwendungen wird<br />
durch die offene Soft ware ar chi -<br />
tektur und den umfangreichen<br />
Befehlssatz erleichtert. Der<br />
Con troller erlaubt u.a. auch die<br />
interne Abspeicherung und<br />
Ausführung von Makro pro -<br />
gram men und den Stand-<br />
Alone- Betrieb mit Monitor und<br />
Keyboard.
Piezo • Nano • Positioning<br />
Automatische optische<br />
Justage<br />
Als Option stehen interne oder<br />
externe Photometer zur Ver fü -<br />
gung. Sie arbeiten nahtlos mit<br />
den im Controller integrierten<br />
Routinen zusammen, die speziell<br />
für die automatische Aus -<br />
rich tung von Kollimatoren,<br />
Faser bündeln und I/O-Chips<br />
entwickelt wurden. Weitere<br />
Informationen zu den Photo -<br />
metern siehe: www.pi.ws.<br />
Linearantriebe & Aktoren<br />
Nanostelltechnik / Piezoelektronik<br />
Nanomesstechnik<br />
Mikrostelltechnik<br />
<strong>Hexapod</strong>en,<br />
Parallelkinematiken<br />
Linearversteller<br />
Horizontalachsen (X)<br />
Vertikalachsen (Z)<br />
Mehrachsig<br />
Rotations- u. Kippversteller<br />
Zubehör<br />
HexControl Software mit Scan eines<br />
faseroptischen Bauteils<br />
F-<strong>206.S</strong>. Abmessungen in mm<br />
Servo- & Schrittmotor -<br />
steuerungen<br />
Einkanalig<br />
Hybrid<br />
Mehrkanalig<br />
Grundlagen der<br />
Mikrostelltechnik<br />
Technische Daten<br />
Index<br />
Modell<br />
F-<strong>206.S</strong>0 / F-<strong>206.S</strong>D<br />
* Stellweg X -8 bis +5,7 mm<br />
* Stellweg Y ±5,7 mm<br />
* Stellweg Z ±6,7 mm<br />
* Stellweg θ X ±5,7°<br />
* Stellweg θ Y ±6,6°<br />
* Stellweg θ Z ±5,5°<br />
Aktorauflösung<br />
33 nm<br />
** Kleinste Schrittweite X, Y, Z 0,1 µm (6-<strong>Achsen</strong>bewegung!)<br />
** Kleinste Schrittweite θ X , θ Y , θ Z 2 µrad (0,4“) (6-<strong>Achsen</strong>bewegung!)<br />
Bidirektionale Wiederholbarkeit X, Y, Z 0,3 µm<br />
Bidirektionale Wiederholbarkeit θ X , θ Y , θ Z 3,6 µrad<br />
Geschwindigkeit X, Y, Z<br />
Belastbarkeit (vertikal)<br />
Masse<br />
Controller<br />
Betriebsspannung<br />
Software<br />
0,01 bis 10 mm/s<br />
2 kg, horizontale Montage,<br />
im Zentrum der Montageplattform<br />
5,8 kg<br />
Digitaler <strong>Hexapod</strong>controller mit optionaler<br />
Photometerkarte und<br />
internen Scan- und Koppelroutinen<br />
100-240 VAC, 50/60 Hz<br />
LabView-Treiber, Software zur Array-<br />
Justage, DLL-Bibliotheken, HexControl<br />
„Scan & Alignment“ Software, Terminalsoftware<br />
*Die maximalen Stell wege der einzelnen Koordinaten<br />
(X, Y, Z, X , Y , Z ) sind voneinander abhängig. Die genannten Daten geben den maxi malen Stellweg einzelner<br />
<strong>Achsen</strong> an, bei denen alle ande ren <strong>Achsen</strong> auf Null position stehen. Andernfalls kann je nach Winkel<br />
oder Linearposi tion der Stell weg geringer<br />
ausfallen.<br />
**Bewegung aller 6 Aktoren. Keine geschleppten Kabel wie bei serieller Kinematik („gestapelter Aufbau“)!<br />
Dadurch werden Biege-, Dreh momente und Reibung eliminiert und die Positionsgenauigkeit verbessert.<br />
Der Interferometertest eines F-<strong>206.S</strong><br />
Systems zeigt die extrem gute<br />
Wiederholbarkeit kleiner Schritte, hier<br />
0,5 µm, im Zeitraster von 100 ms<br />
4-13












