
Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
U-<strong>Boot</strong><br />
Submarine<br />
Sous-marin<br />
Duikboot<br />
„SharCon“<br />
Best.-Nr. / Item-No. / N° de commande / Bestnr.: 22 99 21<br />
Bedienungsanleitung Seite 2 - 33<br />
Operating Instructions Page 34 - 65<br />
Notice d’emploi Page 66 - 97<br />
Gebruiksaanwijzing Pagina 98 - 129<br />
version 01/06
1<br />
2<br />
3<br />
4<br />
5<br />
20 mm<br />
3.4 N<br />
6.15 N<br />
2.2<br />
6,5 mm<br />
3.3<br />
3.4 N<br />
6.11<br />
6.16 N<br />
3.5 N<br />
3.3<br />
2.3<br />
3.2<br />
6.10<br />
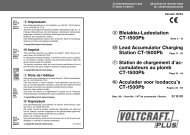
Zusatzanleitung:<br />
Als technische Verbesserung ist bei <strong>“Sharcon”</strong> die<br />
Zentralverschraubung von außen zugänglich.<br />
Damit entfällt das Abschrauben der Rumpfnase<br />
zum Öffnen des <strong>Boot</strong>s.<br />
Die tiefgezogenen Rumpfteile liegen fertig beschnitten<br />
bei.<br />
Die Teile 1.10 und 1.11 aus Baustufe 1 entfallen.<br />
Richten Sie sich beim Bau des Modells nach der<br />
Bauanleitung sowie den untenstehenden<br />
Hinweisen. Neuteile sind mit einem „N“ hinter der<br />
Nummer gekennzeichnet.<br />
Zu Baustufe 2<br />
Bild 1<br />
- Darauf achten, dass die Gewindestange 2.2<br />
vorn 20 mm übersteht.<br />
Zu Baustufe 3<br />
Bild 2<br />
- Das mittlere Loch der Tauchrohrkappe 3.3 auf<br />
6,5 mm aufbohren.<br />
Bild 3<br />
- Kappe aufsetzen. Mittigen Sitz der<br />
Gewindestange prüfen. Die Verklebung der<br />
Tauchrohrkappe 3.3 statt mit Silikon mit Stabilit-<br />
Express ausführen.<br />
Bild 4<br />
- Die Stopmutter 3.4 entfällt. An ihrer Stelle wird<br />
die Verschraubung 3.4 N (Ø 10 x 205 mm) verwendet.<br />
- Den O-Ring 3.5 N auf die Verschraubung<br />
schieben und in die Rille eindrücken.<br />
Zu Baustufe 6<br />
Die 18 Arretierungsplättchen 6.2, 6.3 und 6.12 aus<br />
dem beiliegenden 10 mm breiten ABS-Streifen mit<br />
15 mm Länge zuschneiden. Nach dem Einkleben<br />
die Plättchen entsprechend der Rumpfform biegen.<br />
Bild 5<br />
- In dieser Übersicht sind die notwendigen Teile<br />
für die Zentralverschraubung dargestellt.<br />
- Verschraubung 3.4 N mit einem Inbusschlüssel<br />
SW 4 montieren.<br />
- Die Aussparungen für das Zentrierrohr 6.15 N<br />
gemäß Markierungen in den Teilen 6.10 und<br />
6.11 ausarbeiten - siehe Pfeile.<br />
U-<strong>Boot</strong> <strong>“Sharcon”</strong><br />
Supplementary instructions:<br />
A technical improvement has been introduced in<br />
the <strong>“Sharcon”</strong>, providing external access to the<br />
central screw fixing. It is now no longer necessary<br />
to unscrew the forward <strong>hu</strong>ll section in order to<br />
open the boat.<br />
The vacuum-moulded <strong>hu</strong>ll components are supplied<br />
pre-trimmed.<br />
Parts 1.10 and 1.11 from Stage 1 are no longer<br />
required.<br />
When assembling the model please follow the<br />
building instructions as normal, but refer to the<br />
notes below. New components are indicated by<br />
the letter “N” after the part number.<br />
Stage 2<br />
Fig. 1<br />
- Ensure that the threaded rod 2.2 projects by 20<br />
mm at the front.<br />
Stage 3<br />
Fig. 2<br />
- Open up the central hole in the diving pipe cap<br />
3.3 to 6.5 mm diameter.<br />
Fig. 3<br />
- Fit the cap, and check that the threaded rod is<br />
located centrally. Glue the diving pipe cap 3.3<br />
in place using Stabilit-Express instead of silicone<br />
sealant.<br />
Fig. 4<br />
- The self-locking nut 3.4 is not required; instead<br />
the threaded fitting 3.4 N (10 Ø x 205 mm) is<br />
used.<br />
- Slide the O-ring 3.5 N onto the threaded fitting<br />
and press it into the channel.<br />
Stage 6<br />
Cut the 18 locating plates 6.2, 6.3 and 6.12 from<br />
the strip of 10 mm ABS sheet supplied; each<br />
should be 15 mm long. Glue the plates in place,<br />
then bend them to follow the curvature of the <strong>hu</strong>ll.<br />
Fig. 5<br />
- This picture shows the parts required for the<br />
central screw system.<br />
- Install the threaded fitting 3.4 N using a 4 mm<br />
A/F allen key.<br />
- Cut the notches for the locating tube 6.15 N at<br />
the marked points in parts 6.10 and 6.11 -<br />
see arrows.<br />
1<br />
Notice complémentaire:<br />
L'amélioration technique du modèle <strong>“Sharcon”</strong><br />
consiste à rendre accessible le vissage central<br />
de l'extérieur. Le dévissage du nez de la coque<br />
est ainsi superflu pour ouvrir le sous-marin.<br />
Les éléments emboutis de la coque sont fournis<br />
découpés.<br />
Les pièces 1.10 et 1.11 du stade de montage 1<br />
sont superflues.<br />
Pour le montage du modèle, reportez-vous à la<br />
notice de construction et aux indications fournies<br />
ci-dessous. Les nouvelles pièces sont mies du<br />
suffixe „N“ après le numéro approprié.<br />
En ce qui concerne le stade de montage 2<br />
Fig. 1<br />
- Veiller à ce que la tige filetée 2.2 présente une<br />
saillie de 20 mm à l'avant.<br />
En ce qui concerne le stade de montage 3<br />
Fig. 2<br />
- Porter l'alésage du trou médian du capuchon<br />
du tube d'immersion 3.3 à 6,5 mm.<br />
Fig. 3<br />
- Mettre le capuchon en place. Contrôler l'assise<br />
médiane de la tige filetée. Assurer le collage<br />
du capuchon du tube d'immersion 3.3 à<br />
l'aide de la Stabilit-Express et non, comme<br />
mentionné, avec de silicone.<br />
Fig. 4<br />
- L'écrou autobloquant 3.4 est superflu. Le<br />
remplacer par le raccord vissé 3.4 N (Ø 10 x<br />
205 mm).<br />
- Glisser le joint torique 3.5 N sur le raccord<br />
vissé et le planter dans la gorge.<br />
En ce qui concerne le stade de montage 6<br />
Couper les 18 plaques d'arrêt 6.2, 6.3 et 6.12<br />
dans les bandes d'ABS jointes de 10 mm de<br />
large sur une longueur de 15 mm. Après avoir<br />
collé les plaques, les couder à la forme de la<br />
coque.<br />
Fig. 5<br />
- Cette vue d'ensemble présente les pièces<br />
nécessaires au raccord vissé central.<br />
- Monter le raccord vissé 3.4 N à l'aide d'une<br />
clé mâle six pans de 4 sur plats.<br />
- Réaliser les dégagements pour le tube de<br />
centrage 6.15 N en fonction des repères, sur<br />
les pièces 6.10 et 6.11 – cf. les flèches<br />
Fig. 6<br />
Aanvullende bouwbeschrijving:<br />
De technische verbeteringen bij de <strong>“Sharcon”</strong><br />
bestaan nu hierin dat de centrale schroefverbinding<br />
nu van buiten bereikbaar.<br />
Daarmee is het losschroeven van de neus van de<br />
romp voor het openen van de boot vervallen.<br />
De voorgevormde rompdelen bevinden zich als<br />
op maat gesneden delen in de bouwdoos.<br />
De delen 1.10 en 1.11 van bouwfase 1 vervallen.<br />
Houdt u bij het bouwen van het model aan de<br />
bouwbeschrijving, alsmede aan de hierna volgende<br />
bouwaanwijzingen.<br />
Nieuwe delen zijn aangeduid met een letter “N”<br />
achter de betreffende nummers.<br />
betreffende Bouwfase 2<br />
Foto 1:<br />
- er op letten dat het draadeindje 2.2 ook daadwerkelijk<br />
aan de voorzijde 20 mm uitsteekt.<br />
betreffende Bouwfase 3<br />
Foto 2:<br />
- de opening in het midden kap 3.3 opboren<br />
naar 6,5 mm<br />
Foto 3:<br />
- De kap aanbrengen. Controleren of het<br />
draadeind ook precies in het midden zit.<br />
- Het verlijmen van kap 3.3 moet nu worden<br />
gedaan met Stabilit Express in plaats van lijmen<br />
met siliconen(kit).<br />
Foto 4:<br />
- Het borgmoertje 3.4 vervalt<br />
- In plaats daarvan wordt schroefverbinding<br />
3.4N (Ø 10 x 205 mm) gebruikt.<br />
- De O-ring 3.5N op schroefverbinding 3.4N<br />
sc<strong>hu</strong>iven en in de uitsparing drukken.<br />
betreffende Bouwfase 6<br />
De 18 vergrendelplaatjes 6.2, 6.3 en 6.12 uit de<br />
10 mmm brede ABS-strook snijden op een lengte<br />
van 15 mm.<br />
Na het verlijmen moeten de plaatjes voorzichtig<br />
in de vorm van de romp worden gebogen.<br />
Foto 5:<br />
No.<br />
22 99 21<br />
- In dit overzicht zijn de noodzakelijke delen<br />
voor de centrale schroefverbinding<br />
weergegeven.<br />
- Schroefverbinding 3.4N met een inbussleutel<br />
SW 4 monteren.<br />
- De uitsparingen voor de centreerbuis 6.15N<br />
volgens de markeringen in de delen 6.10 en<br />
6.11 aanbrengen. – zie de pijlen op de foto.
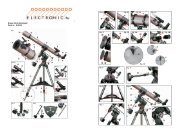
6<br />
7<br />
8<br />
9<br />
10<br />
6.11<br />
6.15 N<br />
6.15 N<br />
6.15 N<br />
6.10<br />
3.4 N<br />
6.16 N<br />
Ø 1,5 / 2,5 mm<br />
Ø 1,5 mm<br />
3.3<br />
6.12<br />
“M”<br />
5 mm<br />
6.11<br />
12 mm<br />
“M”<br />
Bild 6<br />
- Das Zentrierrohr 6.15 N auf die Verschraubung<br />
schieben. Die Teile 6.10 und 6.11 spaltfrei<br />
zueinander und an dem Rumpfmittelteil<br />
anpassen.<br />
- Abweichend von der Anleitung wird das untere<br />
Rumpfvorderteil 6.11 nicht mit dem oberen<br />
Vorderteil 6.10 sondern mit der Tauchrohrkappe<br />
3.3 verklebt.<br />
- Das Oberteil 6.10 wird erst später am Unterteil<br />
sinngemäß wie am Heck das Teil 6.1 mit Teil 5.3<br />
verschraubt.<br />
Bild 7<br />
- Das Oberteil 6.10 aufsetzen, zum<br />
Rumpfmittelteil ausrichten und beidseitig eine<br />
Markierung „M“ anbringen.<br />
Bild 8<br />
- Gemäß diesen Markierungen das Unterteil 6.11<br />
ansetzen und mit Sekundenkleber an der<br />
Kappe 3.3 fixieren.<br />
- Zentrierrohr abziehen, Stützspant 6.16 N aufschieben.<br />
- Zentrierrohr wieder aufschieben, Spant positionieren<br />
und ebenfalls mit Sekundenkleber fixieren.<br />
- Folgende Klebestellen mit Stabilit-Express<br />
nachkleben bzw. vermuffen:<br />
- Rumpfunterteil 6.11 mit Kappe 3.3<br />
- Spant 6.16 N am Rumpfunterteil<br />
- Zentrierrohr am Spant und an der Rumpfspitze.<br />
Bild 9<br />
- Die 6 Arretierungsplättchen 6.12 einkleben.<br />
Bild 10<br />
- Bohrungspositionen auf dem Oberteil anzeichnen<br />
und mit 1,5 mm bohren.<br />
- Oberteil aufsetzen, Löcher durch die<br />
Arretierungsplättchen und den Rand der<br />
Tauchrohrkappe bohren.<br />
- Löcher nur im Oberteil auf 2,5 mm aufbohren.<br />
- Oberteil mit 8 Schrauben 6.14 verschrauben.<br />
Den Bau des Modells gemäß Anleitung fortsetzen.<br />
Zur Darstellung der Schweißnähte entsprechend<br />
den Hilfslinien Streifen schneiden und diese gemäß<br />
Zeichnung des Zubehörblatts vor der Lackierung<br />
positionieren. Nach Fertigstellung des Modells das<br />
Dekor aufbringen.<br />
U-<strong>Boot</strong> <strong>“Sharcon”</strong><br />
Fig. 6<br />
- Slip the locating tube 6.15 N over the threaded<br />
fitting. Trim parts 6.10 and 6.11 to fit accurately<br />
together and against the <strong>hu</strong>ll centre section.<br />
- The building instructions state that the bottom<br />
front <strong>hu</strong>ll section 6.11 should be glued to the<br />
top front section 6.10, but this is now not the<br />
case. Instead glue part 6.11 to the diving tube<br />
cap 3.3.<br />
- Later the top section 6.10 will be screwed to<br />
the bottom section, in the same way that part<br />
6.1 is attached to part 5.3 at the stern.<br />
Fig. 7<br />
- Place the top section 6.10 on the model, align<br />
it with the <strong>hu</strong>ll centre section and mark points<br />
“M” on both sides.<br />
Fig. 8<br />
- Place the bottom section 6.11 on the model,<br />
line it up with the marked points, and tack it to<br />
the cap 3.3 using cyano.<br />
- Withdraw the locating tube and fit the support<br />
former 6.16 N on it.<br />
- Fit the locating tube again. Position the former<br />
carefully and glue it in place using cyano.<br />
- The following glued joints should now be reinforced<br />
with a fillet of Stabilit-Express:<br />
- Hull bottom section 6.11 to cap 3.3;<br />
- Former 6.16 N to <strong>hu</strong>ll bottom section;<br />
- Locating tube to former and <strong>hu</strong>ll tip.<br />
Fig. 9<br />
- Glue the six locating plates 6.12 in place as<br />
shown.<br />
Fig. 10<br />
- Mark the hole positions on the top section and<br />
drill 1.5 mm Ø holes at the marked points.<br />
- Place the top section on the boat and continue<br />
the holes through the locating plates and the<br />
flange of the diving tube cap.<br />
- Remove the top section and open up the holes<br />
in it to 2.5 mm Ø.<br />
- Fix the top section to the model using eight<br />
screws 6.14.<br />
Cut strips to represent the welding seams and<br />
apply them in the positions indicated by the lines<br />
before painting the model, as shown in the drawing<br />
on the accessory sheet.<br />
Apply the decals when the model is finished.<br />
2<br />
- Glisser le tube de centrage 6.15 N sur le raccord<br />
vissé. Ajuster les pièces 6.10 et 6.11<br />
sans jeu mutuel sur la partie centrale de la<br />
coque.<br />
- Contrairement à ce qui est mentionné dans la<br />
notice, la partie avant inférieure de la coque<br />
6.11 n'est pas collée à la partie supérieure<br />
6.10 mais au capuchon du tube d'immersion<br />
3.3.<br />
- La partie supérieure 6.10 ne sera vissée<br />
qu'ultérieurement à la partie inférieure de<br />
même qu'à l'arrière la pièce 6.1 le sera<br />
ultérieurement la pièce 5.3.<br />
Fig. 7<br />
- Mettre la partie supérieure 6.10 en place,<br />
l'aligner par rapport à la partie centrale de la<br />
coque et appliquer de chaque côté un repère<br />
„M“.<br />
Fig. 8<br />
- En fonction de ces repères, mettre la partie<br />
inférieure 6.11 en place et la coller au capuchon<br />
3.3 avec de la colle cyanoacrylate.<br />
- Retirer le tube de centrage, glisser le couple<br />
d'appui 6.16 N en place.<br />
- Réinstaller le tube de centrage, positionner le<br />
couple et le fixer également avec de la colle<br />
cyanoacrylate.<br />
- Recoller les points suivant avec un bon bourrelet<br />
de colle Stabilit-Express :<br />
- la partie inférieure de la coque 6.11 au capuchon<br />
3.3<br />
- le couple 6.16 N à la partie inférieure de la<br />
coque<br />
- le tube de centrage au couple et au nez de la<br />
coque.<br />
Fig. 9<br />
- Coller les 6 plaques d'arrêt 6.12.<br />
Fig. 10<br />
- Reporter la position des alésages sur la partie<br />
supérieure et percer avec une mèche de<br />
1,5 mm.<br />
- Mettre la partie supérieure en place, percer<br />
les trous au travers des plaques d'arrêt et le<br />
bord du capuchon du tube d'immersion.<br />
- Porter les trous à 2,5 mm uniquement dans la<br />
partie supérieure.<br />
- Visser la partie supérieure avec les 8 vis 6.14.<br />
Poursuivre la construction du modèle selon les<br />
indications de la notice.<br />
Pour représenter les joints de soudure couper<br />
des bandes en fonction des indications fournies<br />
par les lignes auxiliaires et les positionner selon<br />
les indications du schéma du feuillet des accessoires<br />
avant la mise en peinture. Une fois la construction<br />
du modèle achevée, y appliquer les éléments<br />
de décoration.<br />
Foto 6:<br />
- De centreerbuis 6.15N op de schroefverbinding<br />
sc<strong>hu</strong>iven. De delen 6.10 en 6.11 zonder<br />
tussenruimte op elkaar pasmaken en eveneens<br />
aanpassen aan het rompmiddendeel.<br />
- In afwijking van de bouwbeschrijving word<br />
het onderste deel van het voorste rompdeel<br />
6.11 NIET met het bovenste rompdeel 6.10<br />
verlijmd maar met kap 3.3.<br />
- Het bovendeel 6.10 word in een later stadium<br />
verschroefd met het onderdeel net zoals aan<br />
het achtersteven deel 6.1. met deel 5.3 wordt<br />
verschroefd.<br />
Foto 7:<br />
- Het bovendeel 6.10 aanbrengen en dan<br />
uitrichten ten opzichte van het rompmiddendeel<br />
en aan beide zijden de markering “M”<br />
aanbrengen.<br />
Foto 8:<br />
- Overeenkomstig deze markeringen het<br />
onderdeel 6.11 monteren en met secondenlijm<br />
aan kap 3.3. vastzetten/fixeren.<br />
- Centreerbuis verwijderen en steunspant<br />
6.16N aanbrengen.<br />
- De centreerbuis er weer opsc<strong>hu</strong>iven, het steunspant<br />
in de juiste positie brengen en eveneens<br />
met secondenlijm vastzetten/fixeren<br />
- De volgende lijmverbindingen moeten met<br />
Stabilit Express nagelijmd worden:<br />
rompdeel 6.11 met kap 3.3;<br />
Spant 6.16N aan het romponderdeel;<br />
Centreerbuis met het spant en aan het rompneus.<br />
Foto 9:<br />
- De 6 vergrendelplaatjes 6.12 op <strong>hu</strong>n plek lijmen.<br />
Foto 10:<br />
No.<br />
22 99 21<br />
- De plaats waar een gaatje geboord moet worden<br />
uitmeten en aftekenen op het bovendeel<br />
en daarna een 1,5 mm gaatje boren.<br />
- Het bovendeel aanbrengen en daarna gaatjes<br />
boren door de bevestigingsplaatjes en aan de<br />
rand van kap 3.3.<br />
- De gaatjes uitsluitend in het bovendeel<br />
opboren naar 2,5 mm<br />
- Het bovendeel met 8 schroeven 6.14<br />
vastschroeven.<br />
De bouw van het model nu volgens de<br />
bouwbeschrijving voortzetten.<br />
Om de lasnaden duidelijker zichtbaar te laten<br />
zijn, strookjes snijden volgens de <strong>hu</strong>lplijnen en<br />
deze strookjes voor het lakken volgens tekening<br />
in positie brengen. Als het model gereed is, de<br />
decoratiestickers aanbrengen.
Geeignete Fernsteueranlage<br />
Zubehör Bestell Nr.<br />
U-<strong>Boot</strong> <strong>“Sharcon”</strong> 22 99 21<br />
Alle Reely-Fernsteuerungen ab 2 Kanälen im 27 MHz und 40 MHz Band.<br />
Zur zusätzlichen Betätigung des Tiefenruders wird ein weiteres Servo und eine Vierkanal-<br />
Fernsteuerung benötigt.<br />
Geeignete Klebstoffe<br />
Leimart Bezeichnung geeignet für<br />
Klebungen von<br />
Zweikomponentenkleber Stabilit-Expreß Holz, Metall, Kunststoff<br />
Einkomponentenkleber universell verwendbar<br />
Geeignete Lacke<br />
Lacke auf Kunstharz- oder Acrylbasis<br />
Technische Änderungen vorbehalten<br />
Ensemble de radiocommande recommandé<br />
Accessoires Réf.<br />
Sous-marin <strong>“Sharcon”</strong> 22 99 21<br />
Tout ensemble de radiocommande Reely à partir de deux voies en 27 MHz ou 41 MHz en<br />
relation avec un servo et un régulateur de vitesse électronque.<br />
Si le gouvernail de plongée est également asservi par la radiocommande, une radiocommande<br />
à quatre voies s’impose avec deux servos.<br />
Colles appropriées<br />
Type de colle Désignation Pour coller<br />
Deux composants Stabilit-Express bois, métal, plastique<br />
Cyanoacrylate tous matériaux<br />
Peintures adaptées<br />
Peintures à base de résine synthétique ou acrylique.<br />
Sous réserve de modifications techniques<br />
Radio control equipment<br />
Extra items<br />
Submarine <strong>“Sharcon”</strong><br />
Order No.<br />
22 99 21<br />
Any Reely radio control system with 2 or more channels in the 27 MHz or 40 MHz band, in<br />
conjunction with one servo and an electronic motor controller rated at 20 A minimum.<br />
If you wish to control the depth vanes, you will need a four-channel set with two servos.<br />
Adhesives<br />
Type of glue Trade names Suitable for gluing<br />
Two-part adhesive Stabilit-Express Wood, metal, plastic<br />
One-shot glue all materials<br />
(cyano-acrylate)<br />
Types of paint<br />
Use synthetic enamel or acrylic paints.<br />
We reserve the right to alter technical specifications<br />
Aanbevolen radiobesturing<br />
Toebehoren<br />
Duikboot <strong>“Sharcon”</strong><br />
Bestelnr.<br />
22 99 21<br />
Alle Reely-radiobesturingen met 2 of meer kanalen in de 27 MHz of 40 MHz uitvoering, in<br />
combinatie met 1 servo en een elektronische snelheidsregelaar van 20 A of zwaarder.<br />
Bij de extra bediening van het duikroer is een vierkanaals-radiobesturing met 2 servo’s<br />
noodzakelijk.<br />
Aanbevolen lijmsoorten<br />
Lijmsoort Benaming Geschikt voor het<br />
lijmen van<br />
Twee-componentenlijm Stabilit-Express Hout, metaal, kunststof<br />
Eencomponentenlijm Universeel bruikbaar<br />
Aanbevolen lak<br />
Synthetische lak op basis van kunsthars of acryl<br />
Technische wijzigingen voorbehouden
Position der Teile 4.1 an den Akkus<br />
Position of parts 4.1 relative to the batteries<br />
Position des pièces 4.1 au niveau des accus<br />
Postie van de delen 4.1 aan de akkus<br />
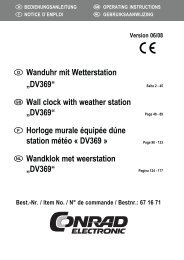
U-<strong>Boot</strong> <strong>“Sharcon”</strong><br />
Schematische Darstellung zum Anbringen der Schweißnähte vor der Lackierung<br />
Schematic drawing showing how the welding seams are applied before painting<br />
Représentation schématique de l'application des raccords de soudure avant la mise en peinture<br />
Schematische afbeelding voor het aanbrengen van de lasnaden voor het lakken.<br />
No.<br />
22 99 21<br />
0 mm 100 mm 200 mm 300 mm 400 mm 500 mm 600 mm 700 mm 800 mm 900 mm
Inhaltsverzeichnis<br />
<br />
1. Einführung ............................................................................................................................. 3<br />
2. Symbol-Erklärung ................................................................................................................... 4<br />
3. Funktionsweise des SHARCON ............................................................................................... 4<br />
4. Technische Daten .................................................................................................................. 5<br />
5. Sicherheitshinweise ............................................................................................................... 5<br />
6. Zubehör ................................................................................................................................. 6<br />
7. Allgemeine Hinweise zum Bauablauf ...................................................................................... 7<br />
8. Hinweise zur Lackierung ......................................................................................................... 7<br />
9. Verarbeitung der Dekorbilder ................................................................................................. 8<br />
10. Hinweise zur Fernsteueranlage .............................................................................................. 8<br />
11. Aufbau ................................................................................................................................... 9<br />
Baustufe 0: Der <strong>Boot</strong>sständer, Teile 0.1-0.2 ............................................................................ 9<br />
Baustufe 1: Vorbereiten des Antriebs, Teile 1.1-1.14 ................................................................ 9<br />
Baustufe 2: Der Einsc<strong>hu</strong>b für Antrieb und Fernsteueranlage, Teile 2.1-2.16 ........................... 10<br />
Baustufe 3: Montage des Tauchrohrs, Teile 3.1-3.4 ............................................................... 11<br />
Baustufe 4: Der Einbau der Fernsteuerung, Teile 4.1- 4.19 .................................................... 13<br />
Baustufe 5: Die Ruderanlage, Teile 5.1-5.19 .......................................................................... 14<br />
Funktionsprobe .................................................................................................................... 16<br />
Baustufe 6: Fertigstellung des Rumpfs, Teile 6.1-6.14 ........................................................... 17<br />
Baustufe 7: Turm und vordere Tiefenruder, Teile 7.1-7.13 ..................................................... 19<br />
Baustufe 8: Die Tauchautomatik, Teile 8.1-8.27 .................................................................... 20<br />
Baustufe 9: Endarbeiten, Auswiegen, Teile 9.1-9.6 ............................................................... 22<br />
12. Einstellung der Tauchautomatik ........................................................................................... 23<br />
13. Stückliste ............................................................................................................................. 24<br />
2<br />
Seite
1. Einführung<br />
Sehr geehrte Kundin, sehr geehrter Kunde,<br />
wir bedanken uns für den Kauf dieses Produkts.<br />
Diese Bedienungsanleitung gehört zu diesem Produkt. Sie enthält wichtige Hinweise zur<br />
Inbetriebnahme und Handhabung. Achten Sie hierauf, auch wenn Sie dieses Produkt an<br />
Dritte weitergeben.<br />
Heben Sie deshalb diese Bedienungsanleitung zum Nachlesen auf!<br />
Alle enthaltenen Firmennamen und Produktbezeichnungen sind Warenzeichen der jeweiligen Inhaber.<br />
Alle Rechte vorbehalten.<br />
Bei Fragen wenden Sie sich an unsere Technische Beratung:<br />
<br />
Tel.: 0180/5 31 21 11 Tel.: 072 42/20 30 60<br />
Fax: 0 96 04/40 88 48 Fax: 072 42/20 30 66<br />
E-Mail: tkb@conrad.de E-Mail: support@conrad.at<br />
Mo. bis Fr. 8.00-18.00 Uhr Mo. bis Do., 8.00-17.00 Uhr, Fr. 8.00-14.00 Uhr<br />
<br />
Tel.: 0848/80 12 88<br />
Fax: 0848/80 12 89<br />
E-Mail: support@conrad.ch<br />
Mo. bis Fr. 8.00-12.00, 13.00-17.00 Uhr<br />
3
2. Symbol-Erklärung<br />
4<br />
Das Symbol mit dem Ausrufezeichen weist Sie auf besondere Gefahren bei Handhabung,<br />
Betrieb oder Bedienung hin.<br />
Das „Pfeil“-Symbol steht für spezielle Tipps und Bedienhinweise.<br />
<br />
3. Funktionsweise des SHARCON<br />
In Ruhe befindet sich das Modell mit nur geringem Restauftrieb bis zur Oberkante des Rumpfrückens<br />
eingetaucht in stabiler Wasserlage.<br />
Bei Langsamfahrt bleibt das Modell in dieser Lage schwimmend an der Oberfläche.<br />
Werden die Motordrehzahl und damit die Geschwindigkeit erhöht, taucht das <strong>Boot</strong> automatisch. Die<br />
Langlöcher im Rumpf erlauben das Eindringen und Ablaufen des Wassers, sodass eine Pumpe nicht<br />
erforderlich ist.<br />
Bei einer bestimmten Tauchtiefe und Geschwindigkeit bewirkt der Wasserdruck auf den drehbar gelagerten<br />
Radarschirm der Tauchautomatik eine Bewegung nach hinten. Diese Bewegung wird mechanisch<br />
auf die vorderen Tiefenruder übertragen. Diese erhalten einen positiven Anstellwinkel, wodurch<br />
das Auftauchen des <strong>Boot</strong>s bewirkt wird.<br />
Sobald der Radarschirm sich nicht mehr unter Wasser befindet, kehren die vorderen Tiefenruder in ihre<br />
Ausgangslage zurück.<br />
Es kann erneut getaucht werden, wobei die Tauchdauer über die Geschwindigkeit beeinflußbar ist.<br />
Das <strong>Boot</strong> kann wahlweise über 2 oder 3 Kanäle gesteuert werden. Bei der Steuerung über 2 Kanäle ist<br />
die Tauchfahrt von der Geschwindigkeit und der Tauchautomatik abhängig.<br />
Mit gewachsener Erfahrung im Steuern des U-<strong>Boot</strong>s eröffnet die zusätzliche Funktion des Tiefenruders<br />
weitere Möglichkeiten:<br />
Die Tauchautomatik kann bei Unterwasserfahrt übersteuert werden, d.h. die Tauchtiefe ist direkt zu<br />
regulieren. Bei entsprechendem Ziehen des Tiefenruders ist schnelle Überwasserfahrt möglich, ohne<br />
dass das <strong>Boot</strong> taucht.
4. Technische Daten<br />
Länge: ca. 900 mm<br />
Breite: ca. 200 mm<br />
Breite, Tauchrohr: ca. 100 mm<br />
Höhe ü.a.: ca. 320 mm<br />
Gewicht: ca. 4100 g<br />
<br />
5. Sicherheitshinweise<br />
1. Beim Bau des Modells beachten: Innerhalb des Druckrohrs nur die vorgeschriebenen<br />
Klebstoffe verwenden. Vor Schließen des Druckrohrs alle Klebestellen gut ablüften lassen.<br />
2. Die Bleiakkus dürfen nicht im geschlossenen Druckrohr geladen werden - Explosionsgefahr!<br />
Zum Laden das Druckrohr öffnen und die Akkus herausnehmen. Unbedingt die Ladevorschriften<br />
des Akkuherstellers beachten.<br />
Beim Laden der Akkus kann über das eingebaute Akku-Sicherheitsventil entzündliches<br />
Wasserstoffgas entweichen. Deshalb vor Einbau die Akkus unbedingt mindestens 1<br />
Stunde ruhen lassen.<br />
3. Nachdem das Druckrohr kurz vor Inbetriebnahme wieder geschlossen wurde, wird durch<br />
Hineinblasen in das Ventil eine Dichtigkeitsprobe durchgeführt. Dazu ein Stück Silikonschlauch<br />
auf das Ventil schieben und mit dem Mund hineinblasen. Das Druckrohr darf<br />
nicht zu stark unter Druck gesetzt werden. Auf keinen Fall eine Luftpumpe oder<br />
Pressluft verwenden.<br />
4. Nach Beendigung des Betriebs bzw. bei Lagerung des Modells das Druckrohr öffnen.<br />
5
6. Zubehör<br />
Nicht enthaltenes, jedoch erforderliches Zubehör:<br />
Nr. Bezeichnung Stück<br />
4.2 Fahrakku 1<br />
4.4 Trennschalter 1<br />
4.13 Servo 1<br />
4.14 Servo 1<br />
4.16 Empfänger 1<br />
4.17 Regler mit mind. 20A 1<br />
--- Präzisionsfett ---<br />
Geeignete Fernsteueranlage<br />
Alle Fernsteuerungen ab 2 Kanälen im 27MHz- und 40MHz-Band.<br />
Für zusätzliche Betätigung des Tiefenruders wird ein weiteres Servo und eine 4-Kanal-Fernsteuerung<br />
benötigt.<br />
Geeignete Klebstoffe<br />
Leimart Geeignet für<br />
Zweikomponentenkleber Holz, Metall, Kunststoff<br />
Einkomponentenkleber Universell verwendbar<br />
Geeignete Lacke<br />
Lacke auf Kunstharz- oder Acrylbasis.<br />
6
7. Allgemeine Hinweise zum Bauablauf<br />
Die Nummerierung entspricht im Wesentlichen der Reihenfolge des Bauablaufs, wobei die Nummer vor<br />
dem Punkt die Baustufe, die Nummer hinter dem Punkt das entsprechende Bauteil angibt.<br />
Verschaffen Sie sich bitte in Verbindung mit dem Bauplan, den Detailzeichnungen, den Anleitungstexten<br />
und der Stückliste einen Überblick über die jeweiligen Bauschritte.<br />
Reste, die bei der Bearbeitung der Tiefziehteile weggeschnitten werden, sind in den Zeichnungen oder<br />
auf den Teilen durch Schraffur gekennzeichnet.<br />
Nach Beschneiden der Tiefziehteile die Schnittkanten mit Schleifpapier glätten.<br />
Das Auffinden der Stanzteile erleichtert die in der Anleitung enthaltene Identifikationszeichnung “0”.<br />
Die Stanzteile entsprechend nummerieren. Teile erst austrennen, wenn sie benötigt werden<br />
und anschließend sauber verputzen. Richtungsangaben, wie z. Bsp. “rechts” oder “hinten”<br />
sind in Fahrtrichtung zu sehen.<br />
<br />
8. Hinweise zur Lackierung<br />
Die Kunststoffteile werden vor der Lackierung mit Kunstharzverdünnung (kein Nitro!) abgewaschen<br />
und danach möglichst wenig angefasst.<br />
Vor dem eigentlichen Farbauftrag ist es empfehlenswert, die Übergänge mit einem guten Kunststoffspachtel<br />
zu spachteln. Anschließend kann das Modell grundiert und lackiert werden.<br />
Wird eine mehrfarbige Lackierung gewünscht, so müssen die Abgrenzungen mit Klebeband oder PVC-<br />
Band vorgenommen werden. Kein Kreppband verwenden!<br />
Das Klebeband muß entfernt werden, wenn die Farbe angetrocknet ist.<br />
Zur Lackierung werden nur hochwertige Acryl- oder Kunstharzlacke empfohlen. Bei der Farbgebung<br />
können Sie sich nach den Abbildungen auf der Kartonage richten.<br />
7
9. Verarbeitung der Dekorbilder<br />
8<br />
Bei der Platzierung der Dekorbilder können Sie sich nach dem Deckelbild der Kartonage<br />
richten.<br />
• Eine nicht zu kleine Plastikschüssel mit lauwarmem Wasser (ca. 20°C) füllen und einige Spritzer<br />
Spülmittel hineingeben.<br />
• Ein Schwammtuch mit Spülwasser anfeuchten.<br />
• Die zu beklebende Stelle am Modell befeuchten.<br />
• Die Decorbilder einzeln abziehen, im Spülwasser anfeuchten, auf die zu beklebende Stelle legen,<br />
ausrichten und mit einem Tuch andrücken.<br />
• Wenn das Wasser unter dem Dekorbild ausgetrocknet ist, das Dekorbild nochmals mit einem trokkenen<br />
Tuch andrücken.<br />
<br />
10. Hinweise zur Fernsteueranlage<br />
Zur Steuerung ist eine Fernsteueranlage mit 2 Kanälen ausreichend. Soll das Tiefenruder zusätzlich<br />
angesteuert werden, ist eine 4-Kanal-Anlage erforderlich.<br />
Die Empfangsanlage wird aus dem Fahrakku mit Strom versorgt, daher benötigen Sie einen Fahrtregler<br />
ab 20A Dauerstrom mit integrierter Empfängerstromversorgung (BEC).<br />
Es wird empfohlen, die vorgesehenen RC-Komponenten einzubauen. Bei Verwendung anderer Einbauteile<br />
können Sie sich nach dem Einbauschema richten.<br />
Maßdifferenzen sind von Ihnen selbst auszugleichen.
11. Aufbau<br />
Baustufe 0: Der <strong>Boot</strong>sständer, Teile 0.1-0.2<br />
Fertigen Sie einen stabilen <strong>Boot</strong>sständer, damit das Modell einen sicheren Stand hat. Hierfür die im<br />
Maßstab 1:1 gezeichneten Auflagepallen 0.1 auf ein entsprechendes Brett übertragen, aussägen und<br />
auf die Grundplatte 0.2 kleben.<br />
Das Material hierfür liegt dem Montagekasten nicht bei, die Maße entnehmen Sie bitte<br />
der Zeichnung.<br />
Die Auflage des fertigen Ständers mit Filz oder Schaumstoff bekleben, um das Modell nicht zu beschädigen<br />
oder zu verkratzen.<br />
Baustufe 1: Vorbereiten des Antriebs, Teile 1.1-1.14<br />
• Bei den Verkabelungsarbeiten den Schaltplan beachten!<br />
• Den Weicheisenmantel vom Elektromotor 1.1 abziehen, da er nicht benötigt wird.<br />
• Den Elektromotor entstören. Dazu je ein Beinchen der Kondensatoren 1.2 mit Isolierschlauch 1.4<br />
versehen und an einen Motorpol und am Gehäuse, welches dazu blankzufeilen ist, anlöten.<br />
• Der ebenfalls mit Isolierschlauch versehene Kondensator 1.3 wird als Brücke zwischen die Motorpole<br />
gelötet.<br />
• Das Motoranschlusskabel 1.5 an die Pole des Motors löten.<br />
• Das Akkukabel aus dem Kabel mit Buchse 1.6 und den AMP-Faston-Steckern 1.7 herstellen.<br />
• Die Laufrichtung des Motors mit der Fernsteuerung prüfen. Dazu den Regler sowie die Fernsteuerung<br />
gemäß der den Geräten beiliegenden Anleitungen anschließen.<br />
• Den Fahrakku anschließen.<br />
• Den Knüppel am Sender in Richtung “Vorwärtsfahrt” betätigen. Jetzt muß der Motor bei Blick auf<br />
das Ritzel rechtsherum, also im Uhrzeigersinn drehen.<br />
Dreht der Motor entgegengesetzt, sind die Motoranschlusskabel durch Umlöten an den<br />
Polen zu vertauschen.<br />
• Die drei Löcher für die Gestänge mit 3,2 mm in die hintere Tauchrohrkappe 1.8 bohren.<br />
• Das mittlere Loch (Stufenbohrung) der hinteren Tauchrohrkappe 1.8 durchgehend auf 6,5 mm aufbohren.<br />
9
• Das Stevenrohr 1.9 mit Getriebegehäuse durch die Tauchrohrkappe schieben.<br />
• Den Schmiernippelhalter 1.10 am unteren Ende halbrund gemäß Stevenrohrkontur ausfeilen und<br />
nach Plan auf das Stevenrohr löten.<br />
• Das Stevenrohr durch den Halter hindurch mit 3 mm bohren. Bohrspäne ausblasen.<br />
• Den Schmiernippel 1.11 auf den Halter kleben. Dazu den Nippel rundum dünn mit Zweikomponentenkleber<br />
einstreichen und Nippel aufsetzen.<br />
• Die Schiffswelle 1.12 in das Stevenrohr schieben. Das Zahnrad mit Teflonfett schmieren.<br />
• Den Gehäusedeckel 1.13 in das Getriebegehäuse legen. Den Motor einsetzen und mit den Schrauben<br />
1.14 befestigen.<br />
Baustufe 2: Der Einsc<strong>hu</strong>b für Antrieb und Fernsteueranlage,<br />
Teile 2.1-2.16<br />
• Die Mutter 2.1 auf die Gewindestange 2.2 aufdrehen.<br />
• Den Querschlitz für die Mutter 2.1 in der Einsc<strong>hu</strong>bplatte 2.3 nach Körnerspitzen bohren und rechtekkig<br />
ausfeilen. Erst dann den Längsschlitz für die Gewindestange ausarbeiten. Die Schlitze auf einer<br />
Seite mit Klebeband abkleben.<br />
• Die Einsc<strong>hu</strong>bplatte 2.3 so auf einen ebenen Tisch legen, dass die Schlitze für Mutter und Gewindestange<br />
über die Kante stehen.<br />
• Die Mutter gemäß des Quer-Schlitzes auf der Gewindestange einstellen. Gewindestange einlegen.<br />
Nach Einstreichen der Schlitze mit Zweikomponentenkleber, die Einheit 2.1/2.2 einkleben.<br />
• Die Öffnungen für Akku und Getriebegehäuse ausarbeiten.<br />
• Den Spant 2.4 mit einem Durchbruch für das Motoranschlusskabel 1.5 versehen.<br />
• Die Einsc<strong>hu</strong>bplatte 2.3 auf eine ebene Unterlage legen.<br />
• Die zwei Spanten 2.4 und 2.5 nach Zeichnung auf der Platte 2.3 positionieren, rechtwinklig ausrichten<br />
und mit Sekundenkleber fixieren.<br />
• Die noch nicht abgelängten Profilschienen 2.6 durch die Spanten schieben und mit Sekundenkleber<br />
fixieren. Schienen durch entlanglaufende Sekundenklebertropfen an Platte und Spanten verkleben.<br />
• Den Überstand der Schienen vorn und hinten gemäß der Kontur der Einsc<strong>hu</strong>bplatte wegschneiden.<br />
Schienen beischleifen bzw. gemäß der Kontur der Tauchrohrkappen anschrägen.<br />
• Die vorderen und die hinteren Stützwinkel 2.7 und 2.8 nach Plan einkleben. Die Winkel müssen an<br />
den Profilschienen anliegen.<br />
• Die zwei Distanzplättchen 2.9 bündig zur Innenkante des hinteren Schlitzes für das Stevenrohr aufkleben.<br />
• Die Auflage 2.10 für das Stevenrohr auf die Plättchen 2.9 kleben.<br />
10
• Die Halteplättchen 2.11 mit Anschlag gegen die Teile 2.9/2.10 kleben.<br />
• Den Antrieb von unten in die Aussparung der Einsc<strong>hu</strong>bplatte setzen. Falls erforderlich, an den Halteplättchen<br />
2.11 nachschleifen.<br />
• Die Löcher für die Blechschrauben 2.13 mit 1,5 mm gemeinsam durch die Flansche am Getriebegehäuse<br />
und die Plättchen 2.11 bohren.<br />
• Den Antrieb herausnehmen und nur die Löcher im Getriebegehäuse auf 2,5 mm aufbohren.<br />
• Den Antrieb wieder einsetzen und mit den Unterlegscheiben 2.12 und den Blechschrauben 2.13<br />
befestigen.<br />
• Die hintere Tauchrohrkappe 1.9 an die Einsc<strong>hu</strong>bplatte heranschieben, jedoch nicht verkleben. Die<br />
Einsc<strong>hu</strong>bplatte muß sich in die inneren Schlitze der Tauchrohrkappe setzen.<br />
• Die Aussparung und Bohrungen im Schalterspant 2.14 nach vorgesehenem Schalter ausarbeiten.<br />
Den Schalterspant anpassen und nur an der Stevenrohrauflage 2.10 mit Sekundenkleber fixieren.<br />
• Das Führungsröhrchen 2.15 vorn mit einem rechteckigen, ca. 3 mm breiten und 5 mm langen Schlitz<br />
versehen; siehe Detailzeichnung ”Z”.<br />
• Die Führungsröhrchen 2.15 und 2.16 ablängen, an den Klebestellen aufrauen und in die seitlichen<br />
Bohrungen der Tauchrohrkappe schieben. Die Tauchrohrkappe nach hinten ziehen und die Führungsröhrchen<br />
mit Sekundenkleber fixieren.<br />
Baustufe 3: Montage des Tauchrohrs, Teile 3.1-3.4<br />
Rote Markierung<br />
Druckkörper 3.2<br />
Die rote Markierung kennzeichnet die Hinterseite des Druckkörpers 3.2.<br />
• Die Profilschiene 3.1 genau auf 320 mm ablängen.<br />
• Die Profilschiene muß im Abstand von 13 mm von der Vorderkante des Tauchrohrs eingeklebt werden.<br />
Diese 13 mm vorn und hinten mit einem Tropfen Sekundenkleber fixieren. Bei eingelegtem<br />
Stahllineal auf der gegenüberliegenden Seite einen Tropfen Sekundenkleber entlanglaufen lassen.<br />
Vorsicht: das Stahllineal nicht mitverkleben.<br />
11
• Die Einsc<strong>hu</strong>bplatte in das Tauchrohr schieben, die Leichtgängigkeit auf der Schiene 3.1 prüfen.<br />
• Das Tauchrohr mitsamt der hinteren Tauchrohrkappe bis zum Schmiernippel schieben.<br />
• Die vordere Tauchrohrkappe 3.3 auf die Gewindestange 2.2 schieben, wobei sich die Einsc<strong>hu</strong>bplatte<br />
in die Schlitze der Kappe setzen muss.<br />
• Die vordere Kappe mit der Stopmutter 3.4 sichern. Mutter nicht fest anziehen.<br />
• Das Tauchrohr bis zum Anschlag nach vorn auf die Kappe schieben. Die hintere Tauchrohrkappe<br />
anschieben. Die beiden Tauchrohrkappen müssen spaltfrei im Tauchrohr sitzen.<br />
• Auf dem Tauchrohr und der vorderen Tauchrohrkappe einen gemeinsamen Markierungsstrich ziehen.<br />
Damit ist die Position der Teile zueinander festgelegt, sodass sie später nicht gegeneinander<br />
verdreht zusammengeklebt werden.<br />
• Die Mutter 3.4 lösen, das Tauchrohr mit der vorderen Tauchrohrkappe nach vorn abziehen.<br />
• Die hintere Tauchrohrkappe wieder anschieben, darauf achten, dass die Einsc<strong>hu</strong>bplatte in die Schlitze<br />
rutscht.<br />
• Den Einsc<strong>hu</strong>b sowie den Schalterspant mit Zweikomponentenkleber an der hinteren Tauchrohrkappe<br />
verkleben. Noch bevor der Klebstoff aushärtet, das Tauchrohr mit vorderer Tauchrohrkappe<br />
aufschieben und damit die hintere Tauchrohrkappe ausrichten.<br />
• Bis zum Aushärten das Modell senkrecht, z. B. mit dem Stevenrohr in eine leere Flasche stellen.<br />
Damit wird verhindert, dass der Klebstoff wegläuft.<br />
• Das gesamte Vorderteil wieder abnehmen.<br />
• Die Klebestelle innen in der hinteren Tauchrohrkappe mit Zweikomponentenkleber vermuffen. Dabei<br />
die Führungsröhrchen 2.15 und 2.16 an der Tauchrohrkappe mitverkleben.<br />
• Das Stevenrohr außen an der Tauchrohrkappe mit Zweikomponentenkleber vermuffen.<br />
• Die vordere Tauchrohrkappe sowie den vorderen, oberen Rand des Tauchrohrs rundum mit durchsichtigem<br />
Klebeband abkleben.<br />
• Den inneren Rand der vorderen Tauchrohrkappe 3.3 und den vorderen Bereich des Tauchrohrs innen<br />
gut mit Silikon einstreichen. Die Kappe auf das Tauchrohr setzen und spaltfrei andrücken. Die<br />
beiden vorher angebrachten Markierungen müssen sich decken.<br />
• Das Silikon muß gut austrocknen, was an übergequollenem Kleber kontrolliert werden kann. Es<br />
muß beidseitig für gute Belüftung gesorgt werden. Nach Aushärten des Silikons die Klebebandstreifen<br />
abziehen und den übergequollenen Klebstoff entfernen.<br />
12
Baustufe 4: Der Einbau der Fernsteuerung, Teile 4.1- 4.19<br />
Hinweis:<br />
Bei starrem Tiefenruder entfällt das Tiefenruderservo 4.13. Bei beweglichem Tiefenruder<br />
entfallen die Madenschraube 4.9 und der Stellring 4.10.Alle anderen Teile und Arbeitsgänge<br />
werden für beide Versionen beibehalten.<br />
Auf diese Art ist es möglich, das Modell am Anfang mit starrem Tiefenruder zu fahren und<br />
nach entsprechender Eingewöhnung das Tiefenruder funktionsfähig auszuführen.<br />
• Die gestanzten, 2 mm starken Akkuhalter 4.1 jeweils beidseitig so beschleifen, dass sie in die 1,5<br />
mm Schlitze des Akkus 4.2 spannungsfrei eingesetzt werden können.<br />
• Die vier Halter bis zum Anschlag nach oben schieben und mit Sekundenkleber festkleben.<br />
• Das Anlenkgestänge 4.3 für den Schalter an einem Ende nach Plan vorbiegen und von innen durch<br />
die innere Bohrung derhinteren Tauchrohrkappe schieben.<br />
• Den Schalter 4.4 so einbauen dass er sich beim Schieben nach hinten, also Ziehen am Gestänge, in<br />
der Stellung “Ein” befindet. Sollte das <strong>Boot</strong> im späteren Fahrbetrieb einmal mit dem Schaltergestänge<br />
hängenbleiben, ist auf diese Art sichergestellt, dass die Fernsteuerung eingeschaltet bleibt.<br />
• Die Querbohrung im Schieber des Schalters genau nach Detailzeichnung anreißen und mit 1,5 mm<br />
vorbohren. Loch auf 2 mm aufbohren.<br />
• Das Gestänge 4.3 von unten durch die Bohrung fädeln, dazu das Gestänge entsprechend nachbiegen.<br />
• Das Gestänge mit dem Stellring 4.5 und der eingedrehten Madenschraube 4.6 sichern. Gestänge<br />
nach Plan ablängen. Die Schnittstelle gut entgraten.<br />
• Den Faltenbalg 4.7 von innen gut mit Wasser befeuchten. Dem Wasser muß ein Sc<strong>hu</strong>ss Spülmittel<br />
beigefügt sein.<br />
• Den Faltenbalg auf dem Gestänge 4.3 nach vorn bis auf den Stutzen der Tauchrohrkappe 1.8 schieben.<br />
Faltenbalg auf eine Gesamtlänge von etwa 50 mm einstellen.<br />
• Den Akku 4.2 probeweise in die Aussparung der Einsc<strong>hu</strong>bplatte setzen.<br />
• Die Halter 4.8 für die Führungsröhrchen 2.15 und 2.16 mit 3,2 mm bohren, von vorn aufschieben und<br />
nach Draufsicht ausrichten.<br />
Die Außenkante der Halter darf nicht über die Kante der Einsc<strong>hu</strong>bplatte stehen. Halter<br />
verkleben.<br />
• Auf das Führungsrohr 2.15 des Tiefenruder-Anlenkgestänges einen mit der Madenschraube 4.9<br />
versehenen Stellring 4.10 lose aufschieben.<br />
• Das Tiefenruder-Anlenkgestänge 4.11 auf 420 mm, das Seitenruder-Anlenkgestänge 4.12 auf 495<br />
mm ablängen. Schnittstellen sauber entgraten.<br />
13
• Die Gestänge 4.11 und 4.12 jeweils an einem Ende mit einer Z-Kröpfung versehen und in der Steuerscheibe<br />
des entsprechenden Servos 4.13/4.14 einhängen.<br />
• Das Tiefenruder-Anlenkgestänge 4.11 in das Führungsröhrchen 2.15 einschieben. Das Servo 4.13<br />
nach Draufsicht platzieren und mit einem Streifen Doppelklebeband 4.15 so auf der Platte 2.3 befestigen,<br />
dass das Gestänge gerade und spannungsfrei nach hinten läuft.<br />
• Bei nicht angelenktem Tiefenruder das Gestänge 4.11 nach Seitenansicht einstellen und die Madenschraube<br />
4.9 des Stellrings 4.10 festziehen; siehe Detailzeichnung ”Z”.<br />
• Ebenso das Seitenruder-Anlenkgestänge 4.12 mit Servo 4.14 einbauen, mit einem Streifen Doppelklebeband<br />
4.15 befestigen.<br />
• Den Empfänger 4.16 und den Fahrtregler 4.17 mit Doppelklebeband 4.15 befestigen.<br />
• Die Fernsteuerung und den Akku nach Schaltplan und den Anleitungen, die den Geräten beiliegen,<br />
anschließen. Die Anschlusskabel von Motor, Regler und Schalter können mit weiteren Doppelklebebandstreifen<br />
auf dem Regler platziert werden.<br />
• Die Ladebuchse muß frei zugänglich bleiben. Die Kabel mit Isolierband oder Spiralschlauch zusammenfassen<br />
und sauber verlegen.<br />
• Die Servos mittels Fernsteuerung in Neutralstellung bringen.<br />
• Die Faltenbälge 4.18 wie beschrieben unter Zugabe von Wasser auf die Gestänge 4.13 und 4.14 schieben<br />
und auf ca. 50 mm Länge einstellen. Darauf achten, dass die Servos die Neutralstellung beibehalten.<br />
Die Faltenbälge 4.7 und 4.18 mit Sekundenkleber sowohl an den Gestängen als auch an den<br />
Stutzen der Tauchrohrkappe dicht verkleben.<br />
• Den Akku 4.2 herausnehmen. Den O-Ring 4.19 auf die hintere Tauchrohrkappe schieben.<br />
• Das Tauchrohr 3.2 mit der vorderen Kappe 3.3 aufsetzen. Die Stopmutter 3.4 aufdrehen und etwas<br />
anziehen. Dadurch den O-Ring 4.19 leicht zusammendrücken.<br />
Baustufe 5: Die Ruderanlage, Teile 5.1-5.19<br />
• Die vier Dämpfungsflächen 5.1 von hinten in die Führungen des Mittelstücks 5.2 schieben.<br />
• Vorn am Schlitz die Dämpfungsflächen jeweils mit einem Tropfen Sekundenkleber verkleben.<br />
• Die Bohrung des Mittelstücks vorn mit einem Bohrer entgraten.<br />
• Die Einheit 5.1/5.2 so auf das Stevenrohr schieben, dass die Lagerbuchse hinten sichtbar ist.<br />
• Zum Ausrichten der Dämpfungseinheit das Modell in den <strong>Boot</strong>sständer setzen.<br />
• Das Tauchrohr so ausrichten, dass der rechte und der linke Stutzen der vorderen Tauchrohrkappe<br />
den gleichen Abstand zum Arbeitstisch aufweisen - X-rechts = X-links; siehe Detailzeichnung ”X”.<br />
• Die Dämpfungseinheit auf dem Stevenrohr nun so drehen, dass die waagrechten Dämpfungsflächen<br />
ebenfalls rechts und links den gleichen Abstand zum Arbeitstisch aufweisen - Y-rechts = Y-links.<br />
14<br />
Zur Kontrolle den vertikalen Sitz der senkrechten Dämpfungsflächen prüfen.
• Das Mittelstück 5.2 vorn mit Zweikomponentenkleber am Stevenrohr verkleben. Es darf kein Klebstoff<br />
in das Stevenrohr laufen.<br />
Hinweis zur folgenden Bearbeitung der Rumpfteile:<br />
Beim Bohren der Löcher für die Blechschrauben zuerst die Bohrung 1,5 mm in beiden Teilen<br />
gemeinsam anbringen. Das Loch im außen befindlichen Teil wird anschließend als Durchgangsloch<br />
auf 2,5 mm erweitert.<br />
Dieser Vorgang wird nachfolgend nicht mehr einzeln beschrieben.Die Langlöcher zum Fluten<br />
des Rumpfs sowie für den Wasserablauf werden stufenweise mit 1,5 mm beginnend<br />
auf 3 mm aufgebohrt.<br />
• Die unteren Langlöcher für den Wasserablauf im unteren Rumpf-Heckteil 5.3 nach Markierungen<br />
bohren und ausfeilen.<br />
• Die drei Langlöcher im Heckbereich zur Durchführung der Gestänge bohren und nach dem Gestängeverlauf<br />
ausfeilen.<br />
• Teil 5.3 nach Markierungen beschneiden und so an die Dämpfungseinheit anpassen, dass es hinten<br />
bündig abschließt. Die Schlitze und die Öffnung nach hinten sind beabsichtigt. Die seitlichen Langlöcher<br />
konturgenau nachfeilen.<br />
• Die Vorderkante von Teil 5.3 so beschleifen, dass sie genau mit dem Innenrand der hinteren Tauchrohrkappe<br />
abschließt.<br />
• Das Rumpf-Heckteil mit Sekundenkleber von innen an der Dämpfungseinheit fixieren. Mit Zweikomponentenkleber<br />
nachkleben.<br />
• Das Modell im Ständer drehen und das Rumpf-Heckteil waagrecht ausrichten.<br />
• Genau in der Mitte ein Loch mit 1,5 mm durch Teil 5.3 und den Rand der Tauchrohrkappe bohren. Die<br />
Kappe selbst darf nicht angebohrt werden. Dies auch beim Bohren der folgenden Löcher beachten.<br />
Das Maß 10 mm unbedingt einhalten.<br />
• Teil 5.3 mit einer Blechschraube 5.4 an der Tauchrohrkappe befestigen.<br />
• Die restlichen zwei Löcher bohren und das Rumpf-Heckteil mit zwei weiteren Blechschrauben 5.4<br />
befestigen.<br />
• Die Kontermutter 5.5 auf die Schiffswelle drehen, 0,5 mm Abstand zum Lager des Stevenrohrs einhalten.<br />
• Die Nabe der Schiffsschraube 5.6 nach Draufsicht kürzen. Die Schnittstelle sauber verputzen. Schiffsschraube<br />
auf die Welle drehen und mit der Mutter 5.5 kontern.<br />
• Das Tiefenruder 5.7 und das Seitenruder 5.8 mit den Hohlnieten 5.9 und den Blechschrauben 5.10<br />
an den Dämpfungsflächen leicht beweglich verschrauben.<br />
• Die Zapfen der Ruderhörner 5.11 abschneiden, die Schnittstelle planschleifen. Jeweils das innere<br />
Loch der Ruderhörner auf 1,5 mm aufbohren.<br />
• Die zwei Rudergestänge 5.12 und 5.13 auf 220 mm ablängen, jeweils an einem Ende mit einer z-<br />
Kröpfung versehen und in den Ruderhörnern einhängen.<br />
• Die drei Führungsröhrchen 5.14 auf 100 mm ablängen.<br />
15
• Zwei der Führungsröhrchen auf die Gestänge 5.12 und 5.13 schieben.<br />
• Die Gestänge samt Röhrchen durch die Langlöcher von Teil 5.3 schieben.<br />
• Die Gestänge 4.11 und 5.12 sowie 4.12 und 5.13 mit den Stellringen 5.15 mit Madenschrauben 5.16<br />
miteinander verbinden.<br />
• Die Ruderhörner an die Ruderflächen anhalten. Die Gestänge müssen möglichst geradlinig und<br />
spannungsfrei verlaufen. Falls erforderlich, die Langlöcher in Teil 5.3 nachfeilen.<br />
• Die Ruderhörner müssen so auf den Ruderflächen positioniert werden, dass die Gestänge sich außerhalb<br />
des Drehkreises der Schiffsschraube befinden.<br />
• Die Madenschrauben 5.16 lösen. Die Ruderhörner bei neutral stehenden Rudern mit Sekundenkleber<br />
ankleben. Achtung: Die Bohrungen in den Ruderhörnern bzw. die Gestänge müssen sich genau im<br />
Drehpunkt der Ruderflächen befinden - die gestrichelte Linie in der Draufsicht und Seitenansicht<br />
beachten.<br />
• Das Schaltergestänge 5.17 an einem Ende abwinkeln, das dritte Führungsröhrchen 5.14 aufschieben.<br />
• Das Gestänge durch das untere Langloch einschieben und mittels Stellring 5.18 und Madenschraube<br />
5.19 mit dem Gestänge 4.3 verbinden.<br />
• Die Führungsröhrchen im Rumpfheck verkleben.<br />
Funktionsprobe<br />
• Zuerst den Sender einschalten. Der Reglerknüppel muß sich in der Stellung “Motor aus” befinden.<br />
• Die Fernsteuerung durch Ziehen des Gestänges 5.17 nach hinten einschalten.<br />
16<br />
Achtung:<br />
Da sowohl die Fernsteuerung als auch der Antrieb aus dem Akku 4.2 mit Strom versorgt<br />
werden, läuft der Motor beim Einschalten kurz an. Nicht mit den Händen in den Drehkreis<br />
der Schiffsschraube geraten - Verletzungsgefahr!<br />
• Die Ruderflächen müssen sich bei auf “neutral” stehenden Servos (Knüppel der Ruder sowie<br />
Trimmungen in Mittelstellung) genau in neutraler Position befinden.<br />
• Zum erforderlichen Nachtrimmen die jeweilige Madenschraube 5.16 lösen, Gestänge verschieben<br />
und Schraube wieder anziehen.<br />
• Die Ruderausschläge und die Servo-Laufrichtung prüfen. Bei vertauschter Ruderfunktion Servo-<br />
Reverse im Sender umstecken.<br />
• Die Motorlaufrichtung nochmals prüfen. Die Schiffsschraube muß bei Vorwärtsfahrt von hinten gesehen<br />
links herum drehen.
Baustufe 6: Fertigstellung des Rumpfs, Teile 6.1-6.14<br />
• Die oberen Langlöcher im Rumpfheckteil 6.1 nach Markierungen bohren und ausfeilen.<br />
• Das obere Rumpfheckteil nach Markierungen ausschneiden. Das Teil hat zum genauen Einpassen<br />
beidseitig ca. 3 mm Übermaß.<br />
• Die Schlitze für die Dämpfungsflächen 5.1 möglichst exakt ausarbeiten.<br />
• Zum genauen Beschneiden bzw. spaltfreien Anpassen des Oberteils 6.1 an das Unterteil 5.3 die<br />
seitlichen Blechschrauben 5.4 lösen. Das Oberteil 6.1 so aufsetzen, dass die noch überstehenden<br />
Längskanten zwischen Tauchrohrkappe und die Ränder des Unterteils rutschen.<br />
Teil 6.1 muß bündig mit dem Innenrand der hinteren Tauchrohrkappe abschließen. Der Rumpfrücken<br />
muß vorn auf der Tauchrohrkappe aufliegen und zum Tauchrohr fluchten.<br />
• Auf diese Art kann die Schneidkante von Teil 6.1 gemäß den Kanten von Teil 5.3 angezeichnet werden.<br />
• Teil 6.1 abnehmen und durch Beschneiden und Beschleifen der Kanten genau an das Unterteil anpassen.<br />
• Auf die beschriebene Weise werden später auch die Mittelteile und Vorderteile zueinander angepaßt.<br />
• Die seitlichen Blechschrauben 5.4 wieder eindrehen.<br />
• Die Arretierungsplättchen 6.2 und 6.3 für das untere und das obere Rumpf-Heckteil 5.3 und 6.1 aus<br />
den halbrunden Stirnseiten-Abschnitten des Unterteils 5.3 nach Markierung zuschneiden.<br />
• Plättchen 6.2 nach Plan so in das untere Heckteil kleben, dass sie etwa um halbe Materiallänge<br />
oben überstehen.<br />
• Die Position der oberen Plättchen 6.3 zwischen den unteren Plättchen 6.2 und den seitlichen Langlöchern<br />
im unteren Heckteil außen anzeichnen. Plättchen 6.3 innen in das Oberteil kleben.<br />
• Das obere Teil 6.1 aufsetzen, spaltfreien Sitz zum Unterteil prüfen. Falls erforderlich, die Plättchen<br />
in der Rundung nachbiegen.<br />
• Die Aufdopplungen 6.4 für die spätere Verschraubung nachbiegen und nach Plan auf die entsprechenden<br />
Plättchen 6.2 kleben.<br />
• Von oben mittig ein Loch 1,5 mm durch Rumpfheckteil 6.1 und den Rand der Tauchrohrkappe bohren<br />
und das Teil 6.1 mit der Blechschraube 6.5 befestigen.<br />
• Die hinteren Löcher im Bereich der Ruderanlage mit 1,5 mm bohren.<br />
• Position der restlichen Bohrungen anzeichnen. Das obere Rumpfheckteil 6.1 und die Plättchen mit<br />
den Aufdopplungen 6.4 gemeinsam durchbohren.<br />
• Die hinteren Blechschrauben 6.6 eindrehen.<br />
• Die Löcher für die Blechschrauben 6.7 durch das Rumpf-Heckteil 6.1 in den Rand der Tauchrohrkappe<br />
bohren - nicht durchbohren.<br />
17
• Das Rumpfheckteil abnehmen, erst dann den Rand der Tauchrohrkappe durchbohren.<br />
• Rumpf-Heckteil wieder aufsetzen und mit den Blechschrauben 6.5-6.7 verschrauben.<br />
• Am oberen Rumpf-Mittelteil 6.8 die Langlöcher bohren und ausfeilen. Mittelteil nach Markierungen<br />
beschneiden und Schneidränder glätten.<br />
• Das Modell in den <strong>Boot</strong>sständer setzen und, wie vorhin beschrieben, waagrecht ausrichten. Zur<br />
Kontrolle die Dämpfungsfläche des Tiefenruders nachmessen.<br />
• Das obere Rumpf-Mittelteil auf das Tauchrohr setzen und parallel zur Dämpfungsfläche ausrichten.<br />
• Die gefundene Position von Teil 6.8 beidseitig am Tauchrohr anzeichnen.<br />
18<br />
Darauf achten, dass zum oberen Rumpf-Heckteil ein Spalt von ca. 2 mm eingehalten wird,<br />
da sich der O-Ring 4.19 sonst später nicht zusammendrücken läßt.<br />
• Teil 6.8 nur in der Mitte am Tauchrohr, nicht an den Rändern sowie der vorderen Tauchrohrkappe<br />
mit Zweikomponentenkleber, welcher dünn aufgetragen wird, verkleben.<br />
Die hintere Tauchrohrkappe sowie den O-Ring nicht mitverkleben.<br />
• Das untere Rumpfmittelteil 6.9 nach Markierungen beschneiden und so auf das Tauchrohr setzen,<br />
dass die Kanten des Oberteils überlappen. Mittelteil über die ganze Länge beidseitig spaltfrei an<br />
das Oberteil anpassen. Teil 6.9 muß flächig auf dem Tauchrohr aufliegen.<br />
• Ober- und Unterteil am Tauchrohr, nicht an den Tauchrohrkappen verkleben. Das Unterteil beidseitig<br />
mit einem über die ganze Länge gespannten Klebebandstreifen fixieren. Nochmals auf spaltfreien<br />
Sitz achten.<br />
• Das obere Rumpf-Vorderteil 6.10 und das untere Rumpf-Vorderteil 6.11 mit den Langlöchern versehen.<br />
Die Löcher für die vorderen Tiefenruder noch nicht bohren.<br />
• Teil 6.10 auf den Rand der vorderen Tauchrohrkappe setzen und mit einem Lineal zum Mittelteil<br />
ausrichten. Vorderteil 6.10 in dieser Lage mit Klebeband fixieren.<br />
Das Lineal kann als Stütze mit fixiert werden.<br />
• Das untere Rumpf-Vorderteil 6.11 spaltfrei anpassen und an das obere Rumpfvorderteil ansetzen.<br />
• Teile von außen über die ganze Länge mit einem Tesastreifen zusammenhalten.<br />
• Die so gefertigte Rumpfnase probeweise an den Rumpf setzen und die Passung zur Tauchrohrkappe<br />
und den spaltfreien Sitz zum Rumpf-Mittelteil prüfen.<br />
• Teile 6.10 und 6.11 von innen mit Sekundenkleber aneinander punkten. Die Arretierungsplättchen<br />
6.12 innen einkleben, wobei sich kein Plättchen im Bereich der Tauchrohrkappe befinden darf. Klebestellen<br />
von innen rundum mit Zweikomponentenkleber nachkleben.
• Den Klebestreifen 6.13, den Sie auf dem Dekorbogen finden, im Randbereich der Tauchrohrkappe in<br />
die Rumpfnase kleben.<br />
• Die Rumpfnase an den Rumpf setzen und zum Rumpfmittelteil ausrichten.<br />
• Löcher am Umfang anzeichnen, bohren und die Rumpfnase mit den Blechschrauben 6.14 an der<br />
Tauchrohrkappe verschrauben.<br />
• Die Tesastreifen erst vor der Lackierung entfernen.<br />
Baustufe 7: Turm und vordere Tiefenruder, Teile 7.1-7.13<br />
• Das <strong>Boot</strong> im Ständer so ausrichten, dass die Tiefenrudereinheit genau parallel zur Arbeitsunterlage<br />
steht.<br />
• Die Löcher für die vorderen Tiefenruder der Tauchautomatik beidseitig nach der Anformung anzeichnen.<br />
Dazu von der Arbeitsunterlage aus messen, um rechts und links den gleichen Wert zu<br />
erhalten. Die Bohrungen müssen sich beidseitig auf der eingezogenen Markierung befinden, um<br />
einen horizontalen Versatz nach vorn oder hinten auszuschließen.<br />
• Löcher stufenweise auf 4 mm aufbohren.<br />
• Den Turm 7.1 ausschneiden und unten planschleifen. Den Schlitz für den Radarmast (8.10) ausfeilen.<br />
Die 3 mm Löcher im Turmdeckel bohren. Die oberen Löcher für die Einstellschrauben mit 4 mm<br />
bohren. Das untere Loch für die Einnietmutter mit 3,2 mm bohren.<br />
• Die jeweils zweifach vorhandenen Turmspanten 7.2-7.4 deckungsgleich aufeinander kleben.<br />
• Den Turmspant 7.2 nach Markierung und innerer Aussparung nur auf die Rumpfnase kleben.<br />
• Den Turm 7.1 probeweise aufsetzen und den genauen Sitz auf dem Rumpf kontrollieren.<br />
• Der mittlere Turmspant 7.3 darf nicht verklebt werden. Er dient später zur Aufnahme der Tauchautomatik.<br />
• Den mittleren Turmspant 7.3 als Distanzstück mit Anschlag gegen den vorderen Turmspant 7.2 schieben.<br />
• Den hinteren Turmspant 7.4 positionieren und auf das Rumpf-Mittelteil kleben. Den mittleren Turmspant<br />
herausnehmen.<br />
• Die Rumpfnase abschrauben.<br />
• Den Schaft des jeweiligen, vorderen Tiefenruders 7.5 nach Detailzeichnung ”W” kürzen.<br />
• Die Hohlniete 7.6 in die Bohrungen der Rumpfnase einsetzen.<br />
• Den Ruderhebel 7.7 nach Zeichnung beschneiden. Den Stellring 7.8 einsetzen und die Schraube 7.9<br />
eindrehen.<br />
• Das vordere Gestänge 7.10 ablängen, einseitig mit einer Z-Kröpfung versehen und im Hebel einhängen.<br />
• Das Verbindungsröhrchen 7.11 ablängen und an den Enden nach Zeichnung ”V” mit einem Schlitz<br />
versehen.<br />
19
• Die Stellringe 7.12 mit den Madenschrauben 7.13 versehen.<br />
• Den Ruderhebel und die Stellringe auf das Verbindungsröhrchen schieben.<br />
• Die Ruder beidseitig in die Hohlniete stecken. Beim Zusammenschieben der Ruder das Verbindungsröhrchen<br />
mit einsetzen.<br />
• Die Ruder rechts und links in die gleiche Position bringen.<br />
• Die Stellringe so drehen, dass sich die Madenschrauben über den eingefeilten Schlitzen befinden.<br />
Madenschrauben anziehen.<br />
• Den Ruderhebel nach Seitenansicht ausrichten und Schraube 7.9 ebenfalls anziehen.<br />
Baustufe 8: Die Tauchautomatik, Teile 8.1-8.27<br />
• In den senkrechten Turmspanten 8.1 und 8.2 Löcher 3,2 mm nach Körnerspitzen bohren,<br />
Einnietmuttern 8.3 einziehen und mit Sekundenkleber sichern.<br />
• Die Hilfsschraube “HS” durch beide Einnietmuttern drehen und zwischen den Spanten einen Abstand<br />
von 26 mm einstellen.<br />
• Die Einheit von innen in den Turm setzen und mittig unter dem Schlitz ausrichten. Die Spanten mit<br />
Sekundenkleber im Turm fixieren.<br />
• Die Hilfsschraube herausdrehen.<br />
20<br />
Die Schraube ist durch eine der Einstellbohrungen zugänglich.<br />
• Die zwei Schrauben 8.4 eindrehen.<br />
• Die Muttern 8.5 auf die Schraubenspitzen der Schrauben 8.4 drehen und jeweils mit einem Tropfen<br />
Sekundenkleber sichern.<br />
• Die Rumpfnase wieder montieren. Den Turm aufsetzen, nochmals ausrichten und nur am vorderen<br />
Turmspant 7.2 bzw. an der Rumpfnase mit Zweikomponentenkleber verkleben.<br />
• Die Aufdopplungen 8.6 bündig zur Außenkante auf den mittleren Turmspant 7.3 kleben.<br />
• Die Lagerplättchen 8.7 nach Körnern mit 2 mm durchbohren. Die Hilfsschraube “HS” durch die Bohrungen<br />
stecken.<br />
• Die Lagerplättchen in die Sicke zwischen Turmspant 7.3 und Aufdopplungen 8.6 kleben.<br />
• Die Hilfsschraube herausziehen, die Löcher auf 4 mm aufbohren.<br />
• Den Stellring 8.8 mit der Madenschraube 8.9 versehen und auf den Radarmast 8.10 schieben. Stellring<br />
genau nach Zeichnung positionieren und Madenschraube anziehen.<br />
• Die Lötösen 8.11 von unten gegen den Stellring schieben, das Ende um 90° drehen und umbiegen.<br />
• Die Lötösen sowohl untereinander als auch am Stellring verlöten.
• Ein Loch mit 1,5 mm durch das umgebogene Lötösenende bohren.<br />
• Die Hülse 8.12 von unten auf den Radarmast schieben.<br />
• Den S-Haken 8.13 zum Einhängen der Feder am Fuß des Radarmasts anlöten.<br />
• Den Radarmast zwischen die Lagerplättchen setzen und mit den Schrauben 8.14 und den Hohlnieten<br />
8.15 befestigen. Schrauben so anziehen, dass der Mast zuverlässig festgeklemmt wird, jedoch<br />
frei drehbar ist.<br />
• Das Gestänge 8.16 ablängen, an einem Ende mit einer Z-Kröpfung versehen und in der Bohrung der<br />
Lötösen einhängen.<br />
• Die Rumpfnase mit Turm vom Modell abnehmen.<br />
• Den Radarmast von unten in den Turm setzen. Den mittleren Turmspant mit der kompletten Mechanik<br />
mit Anschlag gegen den vorderen Turmspant schieben.<br />
Der Spant muß bündig mit der Unterkante des Turms abschließen.<br />
• Die Position der vier Blechschrauben 8.17 anzeichnen. Sowohl den Turm als auch den Turmspant<br />
mit 1,5 mm bohren. Die Mechanik mit den Blechschrauben 8.17 im Turm befestigen.<br />
• Nach Markierung ein Loch 3,2 mm für die Einnietmutter 8.18 im Turm bohren.<br />
• Den Augbolzen 8.19 im S-Haken 8.20, die Feder 8.21 in den S-Haken 8.13 und 8.20 einhängen.<br />
• Den Augbolzen durch die Bohrung im Turm stecken, die Einnietmutter 8.18 von außen aufdrehen<br />
und in die Bohrung drücken.<br />
• Die Grundeinstellung des Augbolzens nach Plan vornehmen.<br />
• Die Gestänge 7.10 und 8.16 mit dem Stellring 8.22 und der Madenschraube 8.23 miteinander verbinden.<br />
Die vorderen Ruderflächen sollten ca. 2° auf Tiefenruder stehen.<br />
• Den ausgetrennten Radarschirm 8.24 auf den Stellring 8.25 kleben.<br />
• Den Radarschirm auf den Mast schieben, den Stellring mit der Madenschraube 8.26 befestigen.<br />
• Im Radarschirm nach Plan ein Loch 1,5 mm bohren.<br />
• Das Drähtchen 8.27 nach Zeichnung zurechtbiegen, ablängen und in das Loch im Radarschirm einkleben.<br />
21
Baustufe 9: Endarbeiten, Auswiegen, Teile 9.1-9.6<br />
• Die Turm-Dämpfungsflächen 9.1 nach Schnitt profilieren, innen an die Turmkontur anpassen und an<br />
den Turm kleben. Rechts und links auf gleichen, waagrechten Sitz der Teile 9.1 achten.<br />
• Das <strong>Boot</strong> öffnen.<br />
• Ein Loch 1 mm für die Stahldrahtantenne 9.2 nach Plan in die hintere Tauchrohrkappe bohren. Zwei<br />
Löcher zur Durchführung und Verlegung der Litzenantenne in der Einsc<strong>hu</strong>bplatte bohren.<br />
• Die Litzenantenne um 500 mm kürzen.<br />
• Die Stahldrahtantenne 9.2 durch die Bohrung in der Tauchrohrkappe schieben.<br />
• Die Verbindung zwischen Litzenantenne und Stahldrahtantenne durch Löten oder durch eine Steckverbindung<br />
herstellen.<br />
• Die Stahldrahtantenne in der Bohrung der Tauchrohrkappe mit Sekundenkleber verkleben und innen<br />
mit Zweikomponentenkleber vermuffen.<br />
• Die Deckplatte 9.3 nach Zeichnung beschleifen, an den Rumpfrücken anpassen und aufkleben.<br />
• Das Loch für das Ventil 9.4 mit 5,3 mm bohren. Ventil einpressen und von außen mit Sekundenkleber<br />
verkleben.<br />
• Nach Feinverschleifen der einzelnen Komponenten ist das Modell lackierfertig.<br />
• Nach Plan eine Bleiplatte 9.5 mit Zweikomponentenkleber genau mittig in die Rumpfnase kleben.<br />
Sechs weitere aufeinandergeklebte Platten deckungsgleich auf die erste Platte aufkleben.<br />
• In das untere Heckteil eine Platte 9.6 nach Plan einkleben. 5 weitere Platten deckungsgleich aufkleben.<br />
• Das Modell komplett zusammenbauen.<br />
• Durch Einblasen in das Ventil 9.4 eine Dichtigkeitsprobe durchführen. Es darf keine Luft nach außen<br />
entweichen.<br />
• Zur Feintrimmung das U-<strong>Boot</strong> in eine gefüllte Badewanne setzen. Das Modell muß so getrimmt werden,<br />
dass es waagrecht im Wasser liegt und bis an den oberen Rand des Rumpfrückens eintaucht.<br />
• Bis zum Erreichen dieser Wasserlage werden vorn etwa zwei Bleiplatten, hinten eineinhalb Platten<br />
erforderlich sein. Die Platten erst außen auf das <strong>Boot</strong> legen. Nach Ermitteln der genauen Plattengröße<br />
und Anzahl diese so einkleben, dass das Modell nach keiner Seite krängt.<br />
• Vor der Jungfernfahrt muß die Schiffswelle im Stevenrohr geschmiert werden. Dazu die Fettpresse<br />
auf den Schmiernippel setzen und das Stevenrohr vollständig mit Fett füllen.<br />
22
12. Einstellung der Tauchautomatik<br />
Die Grundeinstellung von Tauchautomatik und Gestänge sollte für die ersten Fahrten genau nach Bauplan<br />
vorgenommen werden.<br />
Wenn mit zunehmender Routine eine Veränderung des Tauchverhaltens gewünscht wird, kann man<br />
wie folgt vorgehen:<br />
• Herausdrehen der vorderen Schraube 8.4 bewirkt eine stärkere Anstellung der vorderen Tiefenruder<br />
nach unten, was ein schnelleres Abtauchen zur Folge hat.<br />
• Ein Hereindrehen der Schraube nimmt die Anstellung der Ruder zurück und bewirkt damit ein langsameres<br />
Abtauchen.<br />
Die Feder 8.21 muß durch Herausziehen und entsprechendes Verdrehen der Einnietmutter gespannt<br />
oder entspannt werden.<br />
• Herausdrehen der hinteren Schraube 8.4 bewirkt entsprechend schnelleres Auftauchen, ein Hereindrehen<br />
verlängert die Tauchfahrt.<br />
Auch hier muß die Feder 8.21 nachgestellt werden.<br />
Fahrtipps zur Jungfernfahrt<br />
Das obere Ende der Stahldrahtantenne wird zweckmäßigerweise mit einem kleinen Wimpel aus farbiger<br />
Decorfolie gekennzeichnet, um das <strong>Boot</strong> für die ersten Tauchfahrten kenntlich zu machen.<br />
Suchen Sie sich für die ersten Fahrten ein möglichst klares Gewässer ohne Schlingpflanzen etc.<br />
Das Modell ins Wasser setzen und langsam Gas geben. Am Anfang sollte nicht über die Antennenhöhe<br />
hinaus getaucht und nicht mit Vollgas gefahren werden. Ist das Tiefenruder funktionsfähig ausgeführt,<br />
sollte es bei den ersten Fahrten noch nicht benutzt werden, um eventuell eingeleitete, abrupte Tauchvorgänge<br />
zu vermeiden.<br />
23
13. Stückliste<br />
Baustufe 1: Vorbereiten des Antriebs<br />
Nr. Bezeichnung Material Maße in mm Stück Bemerkungen<br />
1.1 Elektromotor mit Ritzel --- Fertigteil 1 nicht enthalten<br />
1.2 Entstörkondensator 100nF --- 2 nicht enthalten<br />
1.3 Entstörkondensator 47nF --- 1 nicht enthalten<br />
1.4 Isolierschlauch Ku 4 nicht enthalten<br />
1.5 Motor-Anschlußkabel Cu/Ku Fertigteil 1 nicht enthalten<br />
1.6 Akkukabel mit Buchse Cu/Ku Fertigteil 1 nicht enthalten<br />
1.7 AMP-Faston-Flachsteckbuchse --- Fertigteil 2 nicht enthalten<br />
1.8 Tauchrohrkappe hinten ABS Spritzteil 1<br />
1.9 Stevenrohr mit Getriebegehäuse MS/Ku Fertigteil 1<br />
1.10 Schmiernippelhalter MS Fertigteil 1<br />
1.11 Schmiernippel Stahl Fertigteil 1<br />
1.12 Schiffswelle mit Zahnrad Stahl/Ku Fertigteil 1<br />
1.13 Gehäusedeckel Ku Spritzteil 1<br />
1.14 Inbusschraube Stahl M3 x 10 2<br />
24
Baustufe 2: Der Einsc<strong>hu</strong>b für Antrieb und Fernsteueranlage<br />
Nr. Bezeichnung Material Maße in mm Stück Bemerkungen<br />
2.1 Mutter Stahl M3 1<br />
2.2 Gewindestange Stahl M3 x 80 1<br />
2.3 Einsc<strong>hu</strong>bplatte ABS 3 (Stanzteil) 1<br />
2.4 Spant hinten ABS 3 (Stanzteil) 1<br />
2.5 Spant vorn ABS 3 (Stanzteil) 1<br />
2.6 Profilschiene ABS T-Profil, ablängen 2<br />
2.7 Stützwinkel vorn ABS 3 (Stanzteil) 2<br />
2.8 Stützwinkel hinten ABS 3 (Stanzteil) 2<br />
2.9 Distanzplättchen ABS 2 (Stanzteil) 2<br />
2.10 Auflage ABS 2 (Stanzteil) 1<br />
2.11 Halteplättchen für Antrieb ABS 3 (Stanzteil) 2<br />
2.12 Unterlegscheibe MS d 2,6, innen 2<br />
2.13 Blechschraube Stahl d 2,2 x 4,5 2<br />
2.14 Schalterspant ABS 3 (Stanzteil) 1<br />
2.15 Führungsröhrchen Ku d 2,2 x d 3,2 1<br />
für Tiefenrudergestänge ablängen<br />
2.16 Führungsröhrchen Ku d 2,2 x d 3,2 1<br />
für Seitenrudergestänge ablängen<br />
25
Baustufe 3: Montage des Tauchrohrs<br />
Nr. Bezeichnung Material Maße in mm Stück Bemerkungen<br />
3.1 Profilschiene ABS T-Profil, 320 lang 1<br />
3.2 Tauchrohr ABS 345 lang 1<br />
3.3 Tauchrohrkappe vorn ABS Spritzteil 1<br />
3.4 Stopmutter Stahl M3 1<br />
Baustufe 4: Der Einbau der Fernsteuerung<br />
Nr. Bezeichnung Material Maße in mm Stück Bemerkungen<br />
4.1 Akkuhalter ABS 2 (Stanzteil) 4<br />
4.2 Fahrakku --- Fertigteil 1 nicht enthalten<br />
4.3 Anlenkgestänge für Schalter MS d 1,5 ablängen 1<br />
4.4 Schalter --- Fertigteil 1 nicht enthalten<br />
4.5 Stellring MS d 2,2 x d 7 x 5 1<br />
4.6 Madenschraube Stahl M 3 x 3 1<br />
4.7 Faltenbalg für Gestänge 4.3 Gummi Fertigteil 1<br />
4.8 Halter für Führungsröhrchen ABS 3 (Stanzteil) 2<br />
4.9 Madenschraube Stahl M 3 x 6 1<br />
4.10 Stellring MS d 4,2 x d 7 x 5 1<br />
4.11 Tiefenruder-Anlenkgestänge MS d 1,5 x 420 1<br />
4.12 Seitenruder-Anlenkgestänge MS d 1,5 x 495 1<br />
4.13 Tiefenruderservo --- Fertigteil 1 nicht enthalten<br />
4.14 Seitenruderservo --- Fertigteil 1 nicht enthalten<br />
4.15 Doppelklebeband Ku 1,6 x 19 x 50 2<br />
4.16 Empfänger --- Fertigteil 1 nicht enthalten<br />
4.17 Regler --- Fertigteil 1 nicht enthalten<br />
4.18 Faltenbalg für Gestänge 4.11/4.12 Gummi Fertigteil 2<br />
4.19 O-Ring Gummi d 85 1<br />
26
Baustufe 5: Die Ruderanlage<br />
Nr. Bezeichnung Material Maße in mm Stück Bemerkungen<br />
5.1 Dämpfungsfläche Ku Spritzteil 4<br />
5.2 Mittelstück Ku Spritzteil 1<br />
5.3 Rumpf-Heckteil unten ABS 1,5 (Tiefziehteil) 1<br />
5.4 Blechschraube Stahl d 2,2 x 6,5 3<br />
5.5 Kontermutter MS M 4 1<br />
5.6 Schiffsschraube Ku d 50, Dreiblatt 1<br />
5.7 Tiefenruder Ku Spritzteil 1<br />
5.8 Seitenruder Ku Spritzteil 1<br />
5.9 Hohlniet MS Fertigteil 4<br />
5.10 Blechschraube Stahl d 2,2 x 11 4<br />
5.11 Ruderhorn Ku Spritzteil 2<br />
5.12 Tiefenrudergestänge MS 1,5 x 220 1<br />
5.13 Seitenrudergestänge MS 1,5 x 220 1<br />
5.14 Führungsröhrchen Ku d 2,2 x d 3,2 x 100 3<br />
5.15 Stellring MS d 3,2 x d 7 x 5 2<br />
5.16 Madenschraube Stahl M3 x 3 2<br />
5.17 Schaltergestänge MS d 1,5 ablängen 1<br />
5.18 Stellring MS d 3,2 x d 7 x 5 1<br />
5.19 Madenschraube Stahl M3 x 3 1<br />
27
Baustufe 6: Fertigstellung des Rumpfs<br />
Nr. Bezeichnung Material Maße in mm Stück Bemerkungen<br />
6.1 Rumpf-Heckteil oben ABS 1,5 (Tiefziehteil) 1<br />
6.2 Arretierungsplättchen ABS 1,5 (Tiefziehteil) 4<br />
6.3 Arretierungsplättchen ABS 1,5 (Tiefziehteil) 4<br />
6.4 Aufdopplung ABS 1,5 (Tiefziehteil) 4<br />
6.5 Blechschraube Stahl d 2,2 x 6,5 1<br />
6.6 Blechschraube Stahl d 2,2 x 6,5 4<br />
6.7 Blechschraube Stahl d 2,2 x 6,5 2<br />
6.8 Rumpf-Mittelteil oben ABS 1,5 (Tiefziehteil) 1<br />
6.9 Rumpf-Mittelteil unten ABS 1,5 (Tiefziehteil) 1<br />
6.10 Rumpf-Vorderteil oben ABS 1,5 (Tiefziehteil) 1<br />
6.11 Rumpf-Vorderteil unten ABS 1,5 (Tiefziehteil) 1<br />
6.12 Arretierungsplättchen ABS 1,5 (Tiefziehteil) 6<br />
6.13 Klebestreifen Ku 2 auf Dekorbogen<br />
6.14 Blechschraube Stahl d 2,2 x 6,5 4<br />
28
Baustufe 7: Turm und vordere Tiefenruder<br />
Nr. Bezeichnung Material Maße in mm Stück Bemerkungen<br />
7.1 Turm ABS 1,5 (Tiefziehteil) 1<br />
7.2 Turmspanten ABS 2 (Stanzteil) je 2<br />
7.3 Turmspanten ABS 2 (Stanzteil) je 2<br />
7.4 Turmspanten ABS 2 (Stanzteil) je 2<br />
7.5 Tiefenruder vorn Ku/MS Spritzteil 2<br />
7.6 Hohlniet MS d 4 x 0,4 x 4 2<br />
7.7 Ruderhebel Ku Spritzteil 1<br />
7.8 Stellring MS d 4 x d 7 x 5 1<br />
7.9 Madenschraube Stahl M3 x 6 1<br />
7.10 Gestänge vorn MS d 1,5 ablängen 1<br />
7.11 Verbindungsröhrchen MS d 3,2 x d 4 1<br />
anpassen<br />
7.12 Stellring MS d 4 x d 7 x 5 2<br />
7.13 Madenschraube Stahl M3 x 6 2<br />
29
Baustufe 8: Die Tauchautomatik<br />
Nr. Bezeichnung Material Maße in mm Stück Bemerkungen<br />
8.1 Turmspant ABS 3 (Stanzteil) 1<br />
8.2 Turmspant ABS 3 (Stanzteil) 1<br />
8.3 Einnietmutter MS M2 2<br />
„HS“ Hilfsschraube MS M2 x 35 1<br />
8.4 Schraube MS M2 x 20 2<br />
8.5 Mutter MS M2 2<br />
8.6 Aufdopplung ABS 3 (Stanzteil) 2<br />
8.7 Lagerplättchen ABS 3 (Stanzteil) 2<br />
8.8 Stellring MS d 4 x d 7 x 5 1<br />
8.9 Madenschraube Stahl M3 x 3 1<br />
8.10 Radarmast MS-Rohr d 4 ablängen 1<br />
8.11 Lötöse MS Fertigteil 2<br />
8.12 Hülse Alu Drehteil 1<br />
8.13 S-Haken MS Fertigteil 1<br />
8.14 Schraube MS M3 x 10 2<br />
8.15 Hohlniet MS d 4 x 0,4 x 4 2<br />
8.16 Gestänge MS d 1,5 ablängen 1<br />
8.17 Blechschraube Stahl d 2,2 x 6,5 4<br />
8.18 Einnietmutter MS M2 1<br />
8.19 Augbolzen MS M2 Fertigteil 1<br />
8.20 S-Haken MS Fertigteil 1<br />
8.21 Feder Stahl Fertigteil 1<br />
8.22 Stellring MS d 3 x d 7 x 5 1<br />
8.23 Madenschraube Stahl M 3 x 3 1<br />
8.24 Radarschirm ABS 1,5 (Tiefziehteil) 1<br />
8.25 Stellring MS d 4 x d 7 x 5 1<br />
8.26 Madenschraube Stahl M3 x 3 1<br />
8.27 Bügel MS 1,5 nach Plan 1<br />
30
Baustufe 9: Endarbeiten, Auswiegen<br />
Nr. Bezeichnung Material Maße in mm Stück Bemerkungen<br />
9.1 Turm-Dämpfungsfläche ABS 2 (Stanzteil) 2<br />
9.2 Antenne Stahldraht d 0,8 x 500 1<br />
9.3 Deckplatte ABS 3 (Stanzteil) 1<br />
9.4 Ventil, kpl. Stahl Fertigteil 1<br />
9.5 Ballast vorn Blei ca. 440 g 1 nicht enthalten<br />
9.6 Ballast hinten Blei ca. 350 g 1 nicht enthalten<br />
31
"0"<br />
32<br />
0.1<br />
0.1<br />
0.2<br />
300<br />
340 x 195 x 10
Table of Contents<br />
<br />
1. Einführung ............................................................................................................................. 3<br />
2. Symbol-Erklärung ................................................................................................................... 4<br />
3. Funktionsweise des SHARCOON ............................................................................................. 4<br />
4. Technische Daten .................................................................................................................. 5<br />
5. Sicherheitshinweise ............................................................................................................... 5<br />
6. Zubehör ................................................................................................................................. 6<br />
7. Allgemeine Hinweise zum Bauablauf ...................................................................................... 7<br />
8. Hinweise zur Lackierung ......................................................................................................... 7<br />
9. Verarbeitung der Dekorbilder ................................................................................................. 8<br />
10. Hinweise zur Fernsteueranlage .............................................................................................. 8<br />
11. Aufbau ................................................................................................................................... 9<br />
Baustufe 0: Der <strong>Boot</strong>sständer, Teile 0.1-0.2 ............................................................................ 9<br />
Baustufe 1: Vorbereiten des Antriebs, Teile 1.1-1.14 ................................................................ 9<br />
Baustufe 2: Der Einsc<strong>hu</strong>b für Antrieb und Fernsteueranlage, Teile 2.1-2.16 ........................... 10<br />
Baustufe 3: Montage des Tauchrohrs, Teile 3.1-3.4 ............................................................... 11<br />
Baustufe 4: Der Einbau der Fernsteuerung, Teile 4.1- 4.19 .................................................... 13<br />
Baustufe 5: Die Ruderanlage, Teile 5.1-5.19 .......................................................................... 14<br />
Funktionsprobe .................................................................................................................... 16<br />
Baustufe 6: Fertigstellung des Rumpfs, Teile 6.1-6.14 ........................................................... 17<br />
Baustufe 7: Turm und vordere Tiefenruder, Teile 7.1-7.13 ..................................................... 19<br />
Baustufe 8: Die Tauchautomatik, Teile 8.1-8.27 .................................................................... 20<br />
Baustufe 9: Endarbeiten, Auswiegen, Teile 9.1-9.6 ............................................................... 22<br />
12. Einstellung der Tauchautomatik ........................................................................................... 23<br />
13. Stückliste ............................................................................................................................. 24<br />
34<br />
Page
1. Introduction<br />
Dear customer,<br />
Thank you for purchasing this product.<br />
We kindly request the user to follow the operating instructions to preserve this condition<br />
and to ensure safe operation!<br />
Please read the operating instructions completely and observe the safety and operation<br />
notes before using the product!<br />
All company names and product designations contained herein are trademarks of the respective owners.<br />
All rights are reserved.<br />
For more inquiries, contact or consult our technical advisory service:<br />
<br />
Tel. no.: +49 9604 / 40 88 80<br />
Fax. no.: +49 9604 / 40 88 48<br />
E-mail: tkb@conrad.de<br />
Mon. to T<strong>hu</strong>r. 8.00am to 4.30pm<br />
Fri. 8.00am to 2.00pm<br />
35
2. Icon Explanation<br />
36<br />
The symbol with the exclamation mark indicates important instructions in this operating<br />
manual which absolutely have to be observed.<br />
This symbol gives you tips and notes on the unit operation.<br />
<br />
3. How the SHARCON works<br />
When at rest the model floats on the surface in a stable attitude, with the top surface of the <strong>hu</strong>ll roughly<br />
at water level.<br />
Buoyancy is just sufficient to keep the model afloat. When run at low speed, the boat stays on the<br />
surface in this attitude.<br />
If motor speed is raised, the model's forward speed increases, and the boat dives automatically. Slots<br />
in the <strong>hu</strong>ll allow water to flow in and out freely, so no pump is required.<br />
Water pressure increases with depth and speed until it is sufficient to rotate the pivoting radar screen<br />
towards the rear. This action activates the automatic diving system.<br />
The movement of the radar screen is transferred mechanically to the forward depth control vanes. The<br />
vanes are moved to a positive angle of attack, which causes the boat to rise to the surface.<br />
As soon as the radar screen is out of the water, the forward vanes return to their former position, and<br />
the model can be dived again. The duration of each dive varies according to the model's speed.<br />
The boat can be controlled using either two or three channels. With two channels the model's diving<br />
characteristics depend on its speed and the automatic diving system. The optional function of<br />
controllable depth vanes opens up new possibilities to the more experienced operator:<br />
The automatic diving system can be over-ridden while the model is under water, i.e. you can control<br />
diving depth directly.<br />
If the depth vanes are pulled back, it becomes possible to run the boat at high speed on the surface,<br />
without the model diving.
4. Technical data<br />
Overall length: ca. 900 mm<br />
Overall beam: ca. 200 mm<br />
Width of buoyancy <strong>hu</strong>ll: ca. 100 mm<br />
Overall height: ca. 320 mm<br />
Weight: ca. 4100 g<br />
<br />
5. Safety Instructions<br />
1. When you are building the model please note: Be sure to use only the recommended<br />
adhesives inside the <strong>hu</strong>ll. Allow all glued joints to dry out fully before you seal the <strong>hu</strong>ll.<br />
2. The lead/acid batteries must not be charged in the sealed <strong>hu</strong>ll, as this could result in<br />
an explosion.<br />
When you want to charge the batteries, open the <strong>hu</strong>ll and remove it first. Be sure to<br />
keep to the recommended charging procedure.<br />
During the charging process inflammable hydrogen gas may be ejected through the<br />
battery´s integral safety valve. It is therefore important to wait at least 1 hour before<br />
installing the batteries in the model.<br />
3. Shortly before running the model you would naturally seal the <strong>hu</strong>ll. After sealing it, you<br />
should blow into the valve to check that the <strong>hu</strong>ll is airtight: Push a piece of silicone<br />
hose onto the valve and blow into it through your mouth. Don´t place the <strong>hu</strong>ll under<br />
excessive pressure - on no account use an air pump or compressed air.<br />
4. When you have finished running the model or when storing it away, open the <strong>hu</strong>ll.<br />
37
6. Extra items<br />
Essential items not included in the kit:<br />
Part Description No. of<br />
4.2 drive battery 1<br />
4.4 isolation switch 1<br />
4.13 servo 1<br />
4.14 servo 1<br />
4.16 receiver 1<br />
4.17 motor controller, min. 20A 1<br />
--- precision grease ---<br />
Radio controll equipment<br />
Any radio control system with 2 or more channels in the 27 MHz or 40 MHz band, in conjunction with<br />
one servo and an electronic motor controller rated at 20 A minimum.<br />
If you wish to control the depth vanes, you will need a four-channel set with two servos.<br />
Adhesives<br />
Type of glue Suitable for gluing<br />
Two-part adhesive Wood, metal, plastic<br />
One-shot glue (cyano-acrylate) All materials<br />
Types of paint<br />
Use synthetic enamel or acrylic paints.<br />
38
7. Sequence of assembly<br />
In general terms the numbering of the kit components corresponds to the sequence of assembly; the<br />
number before the point indicates the stage of construction, the number after the point the individual<br />
component.<br />
Please refer to the plan, the detail drawings, the building instructions and the parts list to ensure that<br />
you understand each stage.<br />
Scrap material which has to be removed from the vacuum mouldings is marked by hatching-in, either in<br />
the drawings or on the part itself.<br />
After cutting the vacuum-moulded parts to size, sand the cut edges smooth.<br />
The identification drawing "O", which is bound into the centre of this booklet, will help you identify the<br />
die-cut parts.<br />
Number the die-cut parts as shown, but do not separate them until they are needed. Clean<br />
up the cut edges before installing them. Directions, such as "right-hand", are as seen<br />
from the rear of the model, looking forward.<br />
<br />
8. Painting<br />
The plastic parts should be washed down with white spirit (not cellulose thinners) before painting.<br />
Avoid touching the cleaned surfaces with your fingers.<br />
Before you apply the final colour finish, we recommend that you apply a good quality polyester filler<br />
paste to all joints, and rub down to a smooth finish.<br />
The model can then be primed and given a colour paint finish.<br />
If any part is to be painted more than one colour, then you will need to mask out the base coat with<br />
Sellotape or PVC tape (not paper masking tape) before applying the second colour.<br />
The tape must be removed as soon as the paint is touch-dry.<br />
The only types of paint that we recommend for this model are high-quality synthetic enamel or acrylic<br />
paints.You can copy the colour scheme shown in the kit box illustration if you wish.<br />
39
9. Applying the transfers<br />
40<br />
The kit box illustration gives a good idea of where to apply the transfers.<br />
• Applying the transfersFill a medium-sized plastic bowl with luke-warm water (around 20 degrees C),<br />
and add a few generous squirts of liquid detergent.<br />
• Moisten a sponge cloth in the solution, and wet the area of the model which is to be decorated.<br />
• Peel off one of the transfers, moisten it in the bowl, place it on the model and move it into position.<br />
• When you are satisfied, press it down with a cloth.<br />
• Allow the water under the transfer to dry out, then press down once more with a soft dry cloth.<br />
<br />
10. Radio control equipment<br />
2-channel radio control system is sufficient to control the model. If you wish to control the depth vanes<br />
you will need a 4-channel set.<br />
The receiver system is powered from the main drive battery, so you will need a motor controller rated at<br />
a minimum of 20 A continuous current, with integral receiver power supply.<br />
We recommend that you use the RC system components shown on the plan. If you intend using a radio<br />
other than the recommended Robbe system, you can still follow the arrangement shown, but you will<br />
need to allow for minor differences in component size.<br />
Set the servos to neutral using the radio control system before you start building (sticks and trim levers<br />
central).
11. Assembling<br />
Stage 0: the boatstand, parts 0.1 - 0.2<br />
The first step is to assemble a strong boatstand so that your model is securely supported on the<br />
workbench. Transfer the shape of the end supports 0.1 to a suitable sheet of wood (they are shown fullsize),<br />
and saw them out.<br />
Parts not included.<br />
Glue the end supports to the baseplate 0.2. Stick felt or foam plastic to the support surfaces of the<br />
completed boatstand, to avoid the model becoming damaged or scratched.<br />
Stage 1: preparing the power system, parts 1.1 - 1.14<br />
• Please refer to the wiring diagram when working on the electrical circuits.<br />
• Slide the soft iron mantle off the electric motor 1.1, as it is not needed for this model.<br />
• The motor 1.1 must be suppressed first. Slip an insulating sleeve 1.4 onto the pins of one condensor<br />
1.2 and solder one pin to one motor terminal and the other to the motor casing.<br />
Repeat the process with the other condensor 1.2 and the other motor terminal. You will need to file<br />
the casing clean before soldering.<br />
• Fit insulating sleeves 1.4 onto both pins of the condensor 1.3, and solder it between the motor<br />
terminals to form a bridge.<br />
• Solder the power leads 1.5 to the motor terminals.<br />
• Make up the battery lead from the lead with socket 1.6, and the AMP Faston plugs 1.7.<br />
• At this stage you should check the direction of rotation of the motor by means of the radio control<br />
system. To do this, connect up the motor controller and radio system, following the instructions<br />
supplied with the units.<br />
Connect the main drive battery. When connecting the lead to the battery, take care to maintain<br />
correct polarity.<br />
• Move the transmitter stick in the direction of „forwards running“. The motor pinion should now<br />
rotate to the right, i.e. clockwise.<br />
If the motor runs in the opposite direction, reverse the connections at the motor terminals<br />
by swapping the leads over.<br />
• Drill the three 3.2 mm holes for the pushrods in the rear buoyancy <strong>hu</strong>ll cap 1.8.<br />
41
• Drill out the central (stepped) hole in the rear buoyancy <strong>hu</strong>ll cap 1.8 to 6.5 mm diameter right through.<br />
• Push the stern tube 1.9 and gearbox housing through the buoyancy <strong>hu</strong>ll cap.<br />
• File out the bottom end of the lubricating nipple holder 1.10 to a half-round shape, to match the<br />
curvature of the stern tube, and solder it to the tube, as shown on the plan.<br />
• Drill a 3 mm hole into the stern tube, drilling through the holder. Blow out the drilling swarf.<br />
• The lubricating nipple 1.11 can now be glued to the holder: apply Stabilit Express thinly all round the<br />
flange of the nipple, and push the parts together.<br />
• Slide the propeller shaft 1.12 into the stern tube. Apply grease to the gear to lubricate it.<br />
• Fit the housing cover 1.13 into the gearbox housing. Insert the motor and tighten the screws 1.14.<br />
Stage 2: insert for the motor / gearbox assembly and<br />
radio control system, parts 2.1 - 2.16<br />
• Screw the nut 2.1 onto the threaded rod 2.2.<br />
• Drill and file out the transverse slot for the nut 2.1 in the insert plate 2.3, starting at the marked<br />
points. When the slot is finished, file out the lengthwise slot for the threaded rod. Cover the slots on<br />
one side with adhesive tape.<br />
• Place the insert plate 2.3 on a flat table, with the slots for the nut and the threaded rod projecting<br />
over the edge.<br />
• Screw the nut in or out on the threaded rod until it matches the position of the transverse slot. Place<br />
the threaded rod in the insert. Apply Stabilit Express to the slots to glue the assembly 2.1 / 2.2 in<br />
place.<br />
• Cut the openings for the battery and the gearbox housing.<br />
• Cut a hole in the bulkhead 2.4 to take the motor lead 1.5.<br />
• Place the insert plate 2.3 on a flat surface.<br />
• Position the two bulkheads 2.4 and 2.5 on the plate 2.3 as shown on the plan, check that they are<br />
upright, and fix them in place with instant glue.<br />
• Push the full-length T-section rails 2.6 through the bulkheads and fix them in place with instant glue.<br />
Allow a drop of instant glue to run along the joints to fix the rails to the plate and the bulkheads.<br />
• Cut away excess rail length at front and rear, following the shape of the insert plate. Sand the rails to<br />
the correct angle to match the inside shape of the buoyancy <strong>hu</strong>ll caps.<br />
• Glue the front and rear gussets 2.7 and 2.8 in place, as shown on the plan. The gussets must rest<br />
against the rails.<br />
• Glue the two spacer plates 2.9 to the insert plate, flush with the inside edge of the rear slot for the<br />
stern tube.<br />
42
• Glue the stern tube support 2.10 on the plates 2.9.<br />
• Glue the mounting plates 2.11 in place, butting up against parts 2.9 / 2.10.<br />
• Place the motor / gearbox assembly in the aperture in the insert plate from underneath. Sand back<br />
the mounting plates 2.11 if necessary.<br />
• Drill 1.5 mm holes through the horizontal webs of the gearbox housing and the plates 2.11, to take<br />
the self-tapping screws 2.13.<br />
• Remove the motor assembly and drill out the holes in the gearbox housing to 2.5 mm diameter.<br />
• Install the motor assembly, fixing it in place with the washers 2.12 and the self-tapping screws 2.13.<br />
• Push up the rear buoyancy <strong>hu</strong>ll cap 1.8 against the insert plate, but do not glue it yet. The insert plate<br />
must fit into the inside slots in the buoyancy <strong>hu</strong>ll cap.<br />
• Cut and file out the rectangular aperture and screw holes in the switch bulkhead 2.14 for the radio<br />
system switch. Trim the switch bulkhead to fit, and glue it to the stern tube support 2.10 only, using<br />
instant glue.<br />
• Cut a rectangular slot, about 3 mm wide and 5 mm long, in the front end of the depth vane guide<br />
tube 2.15 - detail drawing „Z“.<br />
• Cut the guide tubes 2.15 and 2.16 to length, roughen them up at the joint positions, and push them<br />
through the side holes in the buoyancy <strong>hu</strong>ll cap. Pull the buoyancy <strong>hu</strong>ll cap back, and fix the guide<br />
tubes in place with instant glue.<br />
Stage 3: assembling the buoyancy <strong>hu</strong>ll, parts 3.1 - 3.4<br />
Red mark<br />
Pressure vessel 3.2<br />
The red mark indicates the rear face of the pressure vessel 32.<br />
• Cut the T-section rail 3.1 to a length of exactly 320 mm.<br />
• The rail has to be glued in the buoyancy <strong>hu</strong>ll, ending 13 mm short of the front rim of the <strong>hu</strong>ll. Mark<br />
this 13 mm dimension on the inside at the front.<br />
Place the rail 3.1 in the buoyancy <strong>hu</strong>ll 3.2, lining it up with the 13 mm mark.<br />
• Fix the buoyancy <strong>hu</strong>ll on the workbench so that it cannot roll.<br />
43
• Place a steel ruler against the rail 3.1, to help you to align the rail perfectly straight. It must run<br />
parallel to the <strong>hu</strong>ll centreline, and should be perfectly straight.<br />
• Fix the rail in place with a drop of instant glue at front and rear. With the steel ruler resting against<br />
the opposite side of the rail, allow a drop of instant glue to run along the joint. Take care not to glue<br />
the ruler in place!<br />
• Slide the insert plate into the buoyancy <strong>hu</strong>ll, and check that it runs smoothly on the rail 3.1.<br />
• Push the rear buoyancy <strong>hu</strong>ll cap back until it rests against the lubricating nipple, and slide the<br />
buoyancy <strong>hu</strong>ll along to meet the cap.<br />
• Fit the front buoyancy <strong>hu</strong>ll cap 3.3 onto the threaded rod 2.2, and check that the insert plate engages<br />
in the slots in the cap.<br />
• Lock the front cap in place with the self-locking nut 3.4. Do not tighten the nut firmly.<br />
• Push the buoyancy <strong>hu</strong>ll forward against the front cap as far as it will go, and slide the rear cap<br />
forward to meet the <strong>hu</strong>ll. The two caps should seat snugly in the buoyancy <strong>hu</strong>ll, with no gaps.<br />
• Draw an alignment line across the buoyancy <strong>hu</strong>ll and the forward <strong>hu</strong>ll cap. This determines the final<br />
position of the parts, and avoids any danger of gluing them together in the wrong position.<br />
• Undo the nut 3.4, and pull off the buoyancy <strong>hu</strong>ll forward, together with the forward buoyancy <strong>hu</strong>ll<br />
cap.<br />
• Fit the rear buoyancy <strong>hu</strong>ll cap against the insert plate again, checking that it engages squarely in the<br />
slots.<br />
• The insert and the switch bulkhead should now be glued to the rear buoyancy <strong>hu</strong>ll cap, using Stabilit<br />
Express. As soon as you have applied the resin, fit the buoyancy <strong>hu</strong>ll and forward buoyancy <strong>hu</strong>ll cap,<br />
and align all the components carefully.<br />
• Prop up the model vertically until the glue has set hard, e.g. with the stern tube in an empty bottle.<br />
This will prevent the resin running off the joint.<br />
• Remove the whole of the front section.<br />
• Apply a second coating of Stabilit Express to the joint at the rear buoyancy <strong>hu</strong>ll cap on the inside.<br />
Glue the guide tubes 2.15 and 2.16 to the cap at the same time.<br />
• Apply Stabilit Express to the outside of the stern tube at the buoyancy <strong>hu</strong>ll cap.<br />
• The buoyancy <strong>hu</strong>ll should now be glued to the front cap. Apply transparent adhesive tape all round<br />
the forward cap and the front rim of the buoyancy <strong>hu</strong>ll.<br />
• Apply a generous coat of silicone sealant to the inside flange of the forward buoyancy <strong>hu</strong>ll cap 3.3<br />
and the front part of the buoyancy <strong>hu</strong>ll. Line up the alignment marks, and fit the cap on the buoyancy<br />
<strong>hu</strong>ll. Press the parts together until there is no visible gap. Check that the alignment marks are still in<br />
line.<br />
• Allow the silicone to dry out completely; you can check this by feeling the excess material which is<br />
squeezed out. The joint must be open to the air on both sides while the sealant is setting. When the<br />
silicone has cured, remove the strips of tape and the excess sealant.<br />
44
Stage 4: installing the radio control system, parts 4.1 - 4.19<br />
Note:<br />
If you intend fitting fixed depth vanes, the depth vane servo 4.13 is not needed. If you wish<br />
to install controllable depth vanes, the grubscrew 4.9 and the collet 4.10 are not required.<br />
All other components and procedures are the same for both versions. As a result, it is<br />
possible to operate the model initially with fixed depth vanes, then install controllable<br />
vanes once you have got used to the model.<br />
• Sand back both edges of the 2mm thick die-cut battery holders 4.1 until they fit easily into the 1.5<br />
mm slots in the battery 4.2.<br />
• Push the four holders upward as far as they will go, and fix them in place with instant glue.<br />
• Bend one end of the switch actuating rod 4.3 as shown on the plan view, and slip it through the inner<br />
hole in the rear buoyancy <strong>hu</strong>ll cap from the inside.<br />
• Install the switch 4.4. It must be positioned so that it is „On“ when pulled back, i.e. when the pushrod<br />
is pulled. If the switch rod should get tangled in weed when the boat is running, this arrangement<br />
ensures that the radio system stays switched on.<br />
• Mark and drill the transverse hole in the switch knob exactly as shown in the detail drawing „Y“. Use<br />
a 1.5 mm drill first, then open up the hole to 2 mm diameter.<br />
• Thread the pushrod 4.3 through the hole in the knob from the underside, bending the rod as<br />
necessary.<br />
• Lock the pushrod in place with the collet 4.5 and grubscrew 4.6. Cut the pushrod to the length shown<br />
on the plan, and de-burr the cut end carefully.<br />
• Add a little liquid detergent to a bowl of water, and moisten the inside of the flexible boot 4.7 with it.<br />
• Fit the boot onto the pushrod 4.3, and slide it forward as far as the stub on the buoyancy <strong>hu</strong>ll cap 1.8.<br />
Set the boot to a totallength of about 50 mm.<br />
• Temporarily place the battery 4.2 in the aperture in the insert plate.<br />
• Drill 3.2 mm holes in the holders 4.8 for the guide tubes 2.15 and 2.16, fit them onto the tubes from<br />
the front, and position them as shown in the plan view.<br />
The outside edge of the holders must not project beyond the edge of the insert plate. Glue<br />
the holders in this position.<br />
• Fit the grubscrew 4.9 into the collet 4.10, and slip the collet onto the depth vane guide tube 2.15.<br />
• Cut the depth vane pushrod 4.11 to a length of 420 mm, the rudder pushrod 4.12 to 495 mm. De-burr<br />
the cut ends carefully.<br />
• Form a double bend in one end of the pushrods 4.11 and 4.12, and connect them to the output disc<br />
of the corresponding servos 4.13 and 4.14.<br />
45
• Slip the depth vane pushrod 4.11 into the guide tube 2.15. Position the servo 4.13 as shown in the<br />
plan view, and fix it on the plate 2.3 with two strips of double-sided foam tape 4.15, with the pushrod<br />
running in a straight and unobstructed path towards the rear.<br />
• With the depth vanes disconnected, adjust the pushrod 4.11 as shown in the plan view, and tighten<br />
the grubscrew 4.9 in the collet 4.10 - detail drawing „Z“.<br />
• Install the rudder pushrod 4.12 and servo 4.14 in the same way, fixing the servo in place with two<br />
further strips of double-sided foam tape 4.15.<br />
• Fix the receiver 4.16 and the motor controller 4.17 in place with strips of double-sided tape 4.15.<br />
• Connect up the radio control system and the battery, referring to the wiring diagram and the<br />
instructions supplied with the units. Keep the leads to the motor, controller and switch tidy by pressing<br />
them onto a further piece of double-sided tape stuck on top of the motor controller.<br />
• Make sure that the charge socket is still accessible. Wrap the rest of the leads in insulating tape or<br />
spiral tubing, and deploy them neatly.<br />
• Set the servos to neutral from the transmitter.<br />
• Fit the flexible boots 4.18 onto the pushrods 4.13 and 4.14 as described earlier, moistening them<br />
with water beforehand. Set each to a length of about 50 mm. Check that the servos are still at neutral.<br />
Apply instant glue to the boots 4.7 and 4.18 where they meet the pushrods and at the stubs on<br />
the buoyancy <strong>hu</strong>ll cap, to ensure a watertight seal at both ends.<br />
• Remove the battery 4.2. Slip the O-ring 4.19 onto the rear buoyancy <strong>hu</strong>ll cap.<br />
• Fit the buoyancy <strong>hu</strong>ll 3.2 and the forward cap 3.3. Screw the self-locking nut 3.4 into place and<br />
tighten it lightly. This will com press the O-ring 4.19 slightly.<br />
Stage 5: the control system, parts 5.1 - 5.19<br />
• Slide the four fixed control panels 5.1 into the slots in the centre section 5.2 from the rear.<br />
• Apply a drop of instant glue to the slots at the front end of each fixed panel.<br />
• De-burr the hole in the front of the centre section, using a drill bit.<br />
• Fit the assembly 5.1 / 5.2 onto the stern tube; the bush must be visible at the rear.<br />
• The next step is to align the fixed control panel assembly. You will need to place the model in the<br />
boatstand for this.<br />
• Position the buoyancy <strong>hu</strong>ll 3.3 so that the right-hand and left hand stubs on the forward cap are the<br />
same distance above the workbench: X right = X left, c.f. detail drawing ”X”.<br />
• Rotate the fixed control panel assembly on the stern tube until the horizontal panels are also the<br />
same height above the workbench: Y right = Y left. As confirmation, check that the vertical fixed<br />
panels are truly vertical.<br />
• Glue the centre section 5.2 to the stern tube at the front end only. Use Stabilit-Express. Do not run<br />
the risk of glue getting inside the stern tube.<br />
46
Note regarding the next step:<br />
When drilling holes for the self-tapping screws, drill a 1.5 mm hole through both parts<br />
together first. The hole in the outer part is then opened up to 2.5 mm diameter to provide<br />
clearance.<br />
This process is not described in detail every time.The slots for flooding the <strong>hu</strong>ll and letting<br />
water out again should be drilled out in stages, starting at 1.5 mm and ending at 3 mm.<br />
• Drill and file out the bottom slots for water exit in the bottom rear <strong>hu</strong>ll section 5.3 at the marked<br />
points.<br />
• Drill holes for the three slots in the rear <strong>hu</strong>ll section for the pushrod exits, and file them out to follow<br />
the run of the pushrods.<br />
• Cut out part 5.3 as indicated, and trim it to fit snugly against the fixed control panel assembly. It<br />
should finish flush at the rear end. The slots and the rear opening are intentional. File out the lateral<br />
slots to the exact shape shown.<br />
• Sand back the front rim of part 5.3 until it ends exactly flush with the flange of the rear buoyancy <strong>hu</strong>ll<br />
cap.<br />
• Fix the rear <strong>hu</strong>ll section to the fixed control panel assembly by applying instant glue on the inside of<br />
the joint. Apply a fillet of Stabilit Express to reinforce the joint.<br />
• Rotate the model in the stand, and set the rear <strong>hu</strong>ll section exactly horizontal.<br />
• Drill a 1.5 mm hole exactly central through part 5.3 and into the flange of the buoyancy <strong>hu</strong>ll cap 1.8.<br />
Take care not to drill into the cap itself. The same applies when you drill the remaining screw holes.<br />
It is essential to keep to the 10 mm dimension, as shown on the plan.<br />
• Fix part 5.3 to the buoyancy <strong>hu</strong>ll cap with one self-tapping screw 5.4.<br />
• Drill the two side holes for the other self-tapping screws 5.4, and fit the screws.<br />
• Screw the locknut 5.5 onto the propeller shaft, leaving 0.5 mm clearance between it and the stern<br />
tube bush.<br />
• Cut down the <strong>hu</strong>b of the propeller 5.6 as shown in the plan view, and clean up the cut face neatly.<br />
Screw the propeller onto the shaft, and lock it against the nut 5.5.<br />
• Screw the depth vanes 5.7 and the rudder 5.8 to the fixed control panels, using the tubular rivets 5.9<br />
and the self-tapping screws 5.10. Check that they move freely on their hinges.<br />
• Cut off the lugs of the rudder horns 5.11, and sand the cut edges flat. Open up the inner hole of both<br />
horns to 1.5 mm diameter.<br />
• Cut the two pushrods 5.12 and 5.13 to the length of 220 mm, form a double bend into one end of<br />
each, and connect them to the horns.<br />
• Cut the three guide tubes 5.14 to the length of 100 mm.<br />
• Slip two of the guide tubes onto the pushrods 5.12 and 5.13.<br />
• Slide the pushrods and tubes through the slots in part 5.3.<br />
47
• Connect the pairs of pushrods 4.11 and 5.12, and 4.12 and 5.13, using the collets 5.15 and grubscrews<br />
5.16.<br />
• Hold the horns against the control surfaces. The pushrods should run as straight as possible, and<br />
not be under tension. If necessary, file out the slots in part 5.3 until this is so.<br />
• Make sure that the horns are positioned far enough outboard on the control surfaces to eliminate<br />
any danger of them fouling the propeller.<br />
• Loosen the grubscrews 5.16. With the control surfaces at neutral, glue the horns to them with instant<br />
glue. Caution: the holes in the horns and the pushrods must be located exactly at right-angles<br />
to the pivot axis of the hinges - note the dotted line in the plan view and the side view.<br />
• Bend one end of the switch pushrod 5.17 as shown on the plan, and install the third guide tube 5.14.<br />
• Slip the pushrod 5.17 through the bottom slot, and connect it to the pushrod 4.3 by means of the<br />
collet 5.18 and the grubscrew 5.19.<br />
• Glue the guide tubes to the rear <strong>hu</strong>ll section.<br />
Checking the working systems<br />
At this stage you should check that the various systems work correctly. First switch the transmitter on.<br />
The motor controller stick must be at the „Motor off“ position.<br />
• Pull the pushrod 5.17 back to switch the radio control system on.<br />
48<br />
Caution:<br />
As the main battery 4.2 supplies power to the radio control system as well as the main<br />
motor, the motor will run briefly when you switch on. Keep your fingers well away from the<br />
propeller, to avoid injury.<br />
• The control surfaces should be exactly at centre when the servos are at „neutral“ (sticks and trims<br />
central).<br />
• If you need to adjust the linkages, undo the corresponding grub screw 5.16. Slide the pushrods to<br />
the correct position, then tighten the screw again.<br />
• Check the control surface deflections and the direction of servo rotation. If any control system works<br />
in the wrong „sense“, reverse the servo inside your transmitter.<br />
• Check the direction of motor rotation once more. The propeller must rotate to the left (anti-clockwise)<br />
for forwards running, when viewed from the rear.
Stage 6: completing the <strong>hu</strong>ll, parts 6.1 - 6.14<br />
• Drill and file out the upper slots in the top rear <strong>hu</strong>ll section 6.1, along the marked lines.<br />
• Cut out the top rear <strong>hu</strong>ll section 6.1 where indicated. It is about 3 mm oversize, to allow for accurate<br />
trimming on both sides.<br />
• Cut out the slots for the fixed control panels 5.1 as accurately as you can.<br />
• Undo the side self-tapping screws 5.4, to allow you to trim the top section 6.1 to fit snugly against<br />
the bottom section 5.3.<br />
Place the top section 6.1 on the model, fitting the oversized long edges inside the bottom section,<br />
and slotting the front corners between the buoyancy <strong>hu</strong>ll cap and the bottom section. Part 6.1 must<br />
finish flush with the flange of the rear buoyancy<strong>hu</strong>ll cap at the front. The <strong>hu</strong>ll top must rest on the<br />
cap at the front, and line up accurately with the buoyancy <strong>hu</strong>ll.<br />
• You can now mark the cutting line on part 6.1 by scoring lightly along the edges of part 5.3.<br />
• Remove part 6.1 and cut back the edges to the marked line. Sand the cut edges smooth, and check<br />
that the part fits accurately.<br />
• The centre <strong>hu</strong>ll sections and front <strong>hu</strong>ll sections are trimmed and fitted together in the same way at<br />
a later stage.<br />
• Fit the side self-tapping screws 5.4 again.<br />
• Cut the locating plates 6.2 and 6.3 for the top and bottom rear <strong>hu</strong>ll sections 5.3 and 6.1 from the halfround<br />
scrap pieces cut from the end of the bottom <strong>hu</strong>ll section 5.3, cutting to the marked lines.<br />
• Glue the plates 6.2 into the bottom rear section, as shown on the plan, leaving about half their<br />
length projecting at the top.<br />
• Mark the position of the top plates 6.3 on the outside of the bottom rear <strong>hu</strong>ll section, between the<br />
bottom plates 6.2 and the lateral notches. Glue the plates 6.3 to the inside of the top section.<br />
• Fit the top section 6.1 on the model and check that it fits snugly on the bottom section. If necessary,<br />
bend the plates slightly to follow the curvature of the <strong>hu</strong>ll.<br />
• Bend the screw doublers 6.4 to shape, and glue them to the corresponding plates 6.2.<br />
• Drill a 1.5 mm hole centrally through the <strong>hu</strong>ll rear section 6.1 and the flange of the buoyancy <strong>hu</strong>ll cap<br />
from the top, and fix part 6.1 in place with the self-tapping screw 6.5.<br />
• Drill the 1.5 mm holes where marked at the rear, in the area of the control surface assembly.<br />
• Mark the position of the remaining holes. Drill through the top rear <strong>hu</strong>ll section 6.1 and the plates<br />
and doublers 6.4 together.<br />
• Fit the rear self-tapping screws 6.6.<br />
• Drill the holes for the self-tapping screws 6.7 through the rear <strong>hu</strong>ll section 6.2 into the flange of the<br />
buoyancy <strong>hu</strong>ll cap - but do not drill right through.<br />
• Remove the <strong>hu</strong>ll rear section, then drill right through the flange of the cap.<br />
49
• Fit the rear <strong>hu</strong>ll section on the model again, and secure it with the self-tapping screws 6.5 - 6.7.<br />
• Drill and file out the slots in the top centre <strong>hu</strong>ll section 6.8. Cut out the centre section along the<br />
marked lines, and sand the cut edges smooth.<br />
• Place the model in the boatstand and set it exactly horizontal, as previously described. Measure<br />
from the depth vane tips to the workbench to check this.<br />
• Place the top centre <strong>hu</strong>ll section on the buoyancy <strong>hu</strong>ll, and align it parallel to the fixed depth vane<br />
panels.<br />
• Mark the exact position of part 6.8 on both sides of the buoyancy <strong>hu</strong>ll.<br />
50<br />
There must be a gap about 2 mm wide between it and the top rear <strong>hu</strong>ll section, otherwise<br />
it will not be possibleto compress the O-ring 4.19.<br />
• Glue part 6.8 to the buoyancy <strong>hu</strong>ll in the centre only - not along the edges or to the front buoyancy<br />
<strong>hu</strong>ll cap - applying a thin coating of Stabilit Express.<br />
Take care not to glue the rear buoyancy <strong>hu</strong>ll cap and the O-ring at the same time.<br />
• Cut out the bottom centre <strong>hu</strong>ll section 6.9 along the marked lines, and place it on the buoyancy <strong>hu</strong>ll<br />
with the edges overlapping on the top section. Trim both long edges of part 6.9 back until they fit<br />
snugly against the top section. Part 6.9 must rest flat on the surface of the buoyancy <strong>hu</strong>ll.<br />
• Glue the top and bottom sections to the buoyancy <strong>hu</strong>ll - but not to the buoyancy <strong>hu</strong>ll caps. Apply a<br />
long strip of adhesive tape along both sides of the bottom section to hold the component in place.<br />
Check once more that the parts fit together really accurately.<br />
• Cut the slots in the top front <strong>hu</strong>ll section 6.10 and the bottom front <strong>hu</strong>ll section 6.11. Do not drill the<br />
holes for the front depth vanes yet.<br />
• Place part 6.10 on the flange of the front buoyancy <strong>hu</strong>ll cap, and align it with the centre section using<br />
a ruler. Tape the front section 6.10 in this position.<br />
It is a good idea to tape the ruler in place as well, for additional support.<br />
• Trim the bottom front <strong>hu</strong>ll section 6.11 to fit snugly, and hold it against the top front <strong>hu</strong>ll section.<br />
• Apply tape along the entire length of the joints on the outside.<br />
• Fit the assembled <strong>hu</strong>ll nose on the <strong>hu</strong>ll, and check that it fits closely over the buoyancy <strong>hu</strong>ll cap. It<br />
should also be a snug fit to the <strong>hu</strong>ll centre section.<br />
• Spot-glue parts 6.10 and 6.11 together on the inside using instant glue. Glue the locating plates 6.12<br />
on the inside, noting that there are no plates where the buoyancy <strong>hu</strong>ll cap fits. Apply a fillet of Stabilit<br />
Express to all the joints on the inside.
• You will find the joint strip 6.13 on the transfer sheet; apply it inside the <strong>hu</strong>ll nose, along the flange<br />
of the buoyancy <strong>hu</strong>ll cap.<br />
• Place the <strong>hu</strong>ll nose against the <strong>hu</strong>ll and align it with the centre section.<br />
• Mark the position of the screw holes around the circumference, drill them, and fix the nose to the<br />
buoyancy <strong>hu</strong>ll cap using the self-tapping screws 6.14.<br />
• Leave the tape strips in place until it is time to paint the model.<br />
Stage 7: conning tower and forward depth vanes, parts 7.1 - 7.13<br />
• Place the boat in the stand with the rear depth vane assembly exactly parallel to the workbench.<br />
• Mark the position of the holes for the front depth vanes of the automatic diving system on both<br />
sides, at the moulded-in depression. Measure from the workbench surface, to ensure that you drill<br />
at the same height on both sides. Be sure to drill the holes at the moulded-in depressions, to avoid<br />
the danger ofpositioning one vane further forward than the other.<br />
• Open up the holes to 4 mm diameter, using progressively larger drills.<br />
• Cut out the conning tower 7.1 and sand the underside flat. File out the slot for the radar mast (8.10).<br />
Drill the 3 mm holes in the conning tower top. Drill the 4 mm holes at the top for the adjustor screws.<br />
Drill the 3.2 mm hole at the bottom for the rivet nut.<br />
• Glue together the pairs of conning tower bulkheads 7.2 - 7.4 with their edges flush.<br />
• Glue the conning tower bulkhead 7.2 to the <strong>hu</strong>ll nose only, aligning it with the marked line and the<br />
inner aperture.<br />
• Place the conning tower 7.1 on the model and check that it is an accurate fit on the <strong>hu</strong>ll.<br />
• The central conning tower bulkhead 7.3 must not be glued in place. The automatic diving system<br />
mechanism is built onto this component.<br />
• Push the central conning tower bulkhead 7.3 up against the front conning tower bulkhead 7.2, to<br />
act as a spacer.<br />
• Position the rear conning tower bulkhead 7.4 and glue it to the <strong>hu</strong>ll centre section. Remove the<br />
loose central conning tower bulkhead.<br />
• Unscrew the <strong>hu</strong>ll nose.<br />
• Cut down the shaft of each front depth vane 7.5 to the length shown in the detail drawing ”W”.<br />
• Fit the tubular rivets 7.6 in the holes in the <strong>hu</strong>ll nose.<br />
• Cut the tiller 7.7 to the shape shown in the drawing, insert the collet 7.8 and fit the screw 7.9.<br />
• Cut the front pushrod 7.10 to length, form a double bend in one end, and connect it to the tiller.<br />
• Cut the connecting sleeve 7.11 to length and file a slot into it at each end, as shown in the drawing<br />
”V”.<br />
51
• Fit the grubscrews 7.13 into the collets 7.12.<br />
• Slip the tiller and the collets onto the connecting sleeve.<br />
• Slide the depth vanes into the tubular rivets on both sides, fitting the connecting sleeve over the<br />
vanes in the centre.<br />
• Set the depth vanes to the same angle on both sides.<br />
• Rotate the collets until the grubscrews are located over the filed slots, and tighten them.<br />
• Align the tiller as shown in the side elevation, and tighten the screw 7.9.<br />
Stage 8: the automatic diving system, parts 8.1 - 8.27<br />
• Drill 3.2 mm holes where punched in the vertical conning tower bulkheads 8.1 and 8.2. Press the<br />
rivet nuts 8.3 into the holes and secure them with a drop of instant glue.<br />
• Screw the jig screw „HS“ through both rivet nuts and set a spacing of 26 mm between the bulkheads.<br />
• Place this assembly inside the conning tower and position it centrally under the slot. Fix the bulkheads<br />
in the conning tower with instant glue.<br />
• Remove the jig screw.<br />
52<br />
The screw is accessible through one of the adjustor holes.<br />
• Fit the two screws 8.4.<br />
• Fit the nuts 8.5 on the tip of the screws 8.4 and secure each with a drop of instant glue.<br />
• Mount the <strong>hu</strong>ll nose on the model again. Fit the conning tower, align it accurately, and glue it to the<br />
front conning tower bulkhead 7.2 and the <strong>hu</strong>ll nose only, using Stabilit Express.<br />
• Glue the doublers 8.6 to the centre conning tower bulkhead 7.3, keeping the outside edges flush.<br />
• Drill 2 mm holes through the vertical plates 8.7 where punched, and fit the jig screw „HS“ through<br />
the holes.<br />
• Glue the vertical plates in the angle between the conning tower bulkhead 7.3 and the doublers 8.6.<br />
• Remove the jig screw, and open up the holes to 4 mm diameter.<br />
• Fit the grubscrew 8.9 into the collet 8.8 and slip it onto the radar mast 8.10. Position the collet in the<br />
exact position shown on the plan, and tighten the grubscrew.<br />
• Push the solder tags 8.11 up against the collet from underneath, rotate the end through 90 degrees,<br />
and bend them down, as shown on the plan.<br />
• Solder the solder tags to each other and to the collet.
• Drill a 1.5 mm hole through the formed end of the solder tags.<br />
• Slip the machined aluminium sleeve 8.12 onto the bottom end of the radar mast.<br />
• Solder the S-hook 8.13 to the base of the radar mast; the return spring is attached to this later.<br />
• Hold the radar mast between the vertical plates and fix it in place with the screws 8.14 and the<br />
tubular rivets 8.15. Tighten the screws to the point where the mast is clamped firmly, but still rotates<br />
freely.<br />
• Cut the pushrod 8.16 to length, form a double bend in one end, and connect it to the hole in the<br />
solder tags.<br />
• Remove the <strong>hu</strong>ll nose and conning tower from the model.<br />
• Fit the radar mast into the conning tower from underneath. Push the centre conning tower bulkhead,<br />
complete with mechanism, up against the front conning tower bulkhead, as far as it will go.<br />
The bulkhead should end up flush with the bottom edge of the conning tower.<br />
• Mark the position of the four self-tapping screws 8.17. Drill 1.5 mm holes through the conning tower<br />
and into the conning tower bulkhead 7.3. Secure the assembly to the conning tower using the selftapping<br />
screws 8.17.<br />
• Connect the ring bolt 8.19 to the S-hook 8.20, and fit the spring 8.21 between the two S-hooks<br />
8.13 and 8.20.<br />
• Fit the ring bolt through the front hole in the conning tower, screw the rivet nut 8.18 onto it from the<br />
outside, and press the nut into the hole.<br />
• Set up the eye-bolt in its basic position, as shown on the plan.<br />
• Connect the two pushrods 7.10 and 8.16 using the collet 8.22 and the grubscrew 8.23. The front<br />
depth vanes should be set to about 2 degrees „down“.<br />
• Cut out the radar screen 8.24 and glue it to the collet 8.25.<br />
• Slip the radar screen onto the mast and fix it in place by screwing the grubscrew 8.26 into the collet.<br />
• Drill a 1.5 mm hole in the radar screen, as shown on the plan.<br />
• Bend the wire 8.27 to the shape shown on the plan, cut it to length, and glue it into the hole in the<br />
screen.<br />
53
Stage 9: final work, balancing, parts 9.1 - 9.6<br />
• Sand the fixed conning tower control panels 9.1 to the profile shown in the cross-section, trim the<br />
inboard ends to match the shape of the conning tower, and glue them in place. Check that the two<br />
parts 9.1 are horizontal and in line.<br />
• Open up the boat.<br />
• Drill a 1 mm hole for the steel whip aerial 9.2 in the rear buoyancy <strong>hu</strong>ll cap 1.8, as shown on the plan.<br />
Drill two holes for the receiver aerial in the insert plate.<br />
• Cut down the flexible receiver aerial by 500 mm.<br />
• Push the steel whip aerial 9.2 through the hole in the buoyancy <strong>hu</strong>ll cap.<br />
• Make up the connection between the flexible aerial and the whip aerial, either by soldering the ends<br />
together, or by fitting a plug and socket.<br />
• Glue the steel whip aerial in the hole in the buoyancy <strong>hu</strong>ll cap, using instant glue, and apply a fillet of<br />
Stabilit Express on the inside.<br />
• Sand the top plate 9.3 to the shape shown in the drawing, trim it to fit on the <strong>hu</strong>ll top, and glue it in<br />
place.<br />
• Drill a 5.3 mm hole for the valve 9.4. Press the valve into the hole and secure it by applying instant<br />
glue on the outside.<br />
• Sand all parts smooth, using very fine glasspaper, and your model is ready for painting.<br />
• Glue one lead sheet 9.5 exactly central in the <strong>hu</strong>ll nose, in the position shown on the plan, using<br />
Stabilit Express. Glue a further six sheets on top of the first, with the edges flush.<br />
• Glue one lead sheet 9.6 in the bottom rear section, as shown on the plan. Glue a further 5 sheets on<br />
top of the first.<br />
• Assemble the model completely.<br />
• Blow into the valve 9.4 to check that the buoyancy <strong>hu</strong>ll is airtight. No air should escape to the outside<br />
when you blow.<br />
• Place the submarine in a filled bathtub to allow you to fine trim the model’s balance. It should float<br />
exactly horizontal, with the top surface of the <strong>hu</strong>ll level with the surface of the water.<br />
• To achieve this basic attitude, you will need to add about two more lead sheets at the front, and<br />
about one and a half more sheets at the rear. First place the sheets on top of the <strong>hu</strong>ll, and establish<br />
the size and number required. Glue them on top of the other lead sheets, and check that the model<br />
has no tendency to list.<br />
• Before you run the model for the first time, the propeller shaft must be lubricated. Fit the grease gun<br />
over the lubricating nipple, and fill the stern tube completely with grease.<br />
54
12. Setting up the diving system<br />
For your first attempts at running the model, the basic setting of the automatic diving system and the<br />
linkages should be exactly as shown on the plan.<br />
Once you have become accustomed to the model, you can modify the diving characteristics in the<br />
following way:<br />
• Slackening the front screw 8.4 provides a greater „down“ setting of the front depth vane, which<br />
results in faster diving.<br />
• Screwing the same screw further in reduces the „down“ setting, and the model will dive more slowly.<br />
You can adjust the tension of the spring 8.21 by pulling it out and screwing the rivet nut in or out.<br />
Unscrewing the rear screw 8.4 makes the boat surface more quickly.<br />
• Screwing it in lengthens the diving phase.<br />
Here again the spring 8.21 will need to be adjusted to match the new setting.<br />
Tips for the maiden voyage<br />
It is a good idea to fit a small pennant, made of coloured trim film, to the tip of the steel whip aerial.<br />
This will make it easier for you to keep sight of the boat during the first attempts at diving.<br />
Seek out an expanse of water, as far as possible devoid of water weed.<br />
Place the boat in the water and slowly open the throttle. Do not allow the model to dive deeper than<br />
aerial height at first, and do not apply full throttle.<br />
If the depth vane is controllable, do not use it for the first runs, otherwise you might inadvertently set<br />
the boat into an abrupt dive.<br />
55
13. Parts list<br />
Stage 1: preparing the power system<br />
Part Description Material Size in mm No. Notes<br />
No.<br />
1.1 Electric motor / pinion --- Ready made 1 Not included<br />
1.2 Suppressor condensor --- 100 nF 2 Not included<br />
1.3 Suppressor condensor --- 47 nF 1 Not included<br />
1.4 Insulating sleeve Plastic Ready made 4 Not included<br />
1.5 Motor power lead Cu./Pl. Ready made 1 Not included<br />
1.6 Battery lead / socket Cu./Pl. Ready made 1 Not included<br />
1.7 AMP Faston socket --- Ready made 2 Not included<br />
1.8 Rear buoyancy <strong>hu</strong>ll cap ABS Ready made 1 Inj. moulded<br />
1.9 Stern tube / gear housing Br./Pl. Ready made 1<br />
1.10 Lubricating nipple holder Brass Ready made 1<br />
1.11 Lubricating nipple Steel Ready made 1<br />
1.12 Propeller shaft / gear Steel/Pl. Ready made 1<br />
1.13 Housing cover Plastic Ready made 1 Inj. moulded<br />
1.14 Socket-head screw Steel M3 x 10 2<br />
56
Stage 2: insert for the motor / gearbox assembly and radio control<br />
system<br />
Part Description Material Size in mm No. Notes<br />
No.<br />
2.1 Nut Steel M3 1<br />
2.2 Threaded rod Steel M3 x 80 1<br />
2.3 Insert plate ABS 3, die-cut 1<br />
2.4 Rear bulkhead ABS 3, die-cut 1<br />
2.5 Front bulkhead ABS 3, die-cut 1<br />
2.6 Profiled rail ABS Overlength 2 T-section<br />
2.7 Front gusset ABS 3, die-cut 2<br />
2.8 Rear gusset ABS 3, die-cut 2<br />
2.9 Spacer plate ABS 2, die-cut 2<br />
2.10 Support ABS 2, die-cut 1<br />
2.11 Motor mounting plate ABS 3, die-cut 2<br />
2.12 Washer Brass 2.6 I.D. 2<br />
2.13 Self-tapping screw Steel 2.2 x 4.5 2<br />
2.14 Switch bulkhead ABS 3, die-cut 1<br />
2.15 Guide tube for depth vane pushrod Plastic 2.2 x 3.2 1 Overlength<br />
2.16 Guide tube for rudder pushrod Plastic 2.2 x 3.2 1 Overlength<br />
Stage 3: assembling the buoyancy <strong>hu</strong>ll<br />
Part Description Material Size in mm No. Notes<br />
No.<br />
3.1 Profiled rail ABS 320 long 1 T-section<br />
3.2 Buoyancy <strong>hu</strong>ll ABS 345 long 1<br />
3.3 Front buoyancy <strong>hu</strong>ll cap ABS Ready made 1 Inj. moulded<br />
3.4 Self-locking nut Steel M3 1<br />
57
Stage 4: installing the radio control system<br />
Part Description Material Size in mm No. Notes<br />
No.<br />
4.1 Battery holder ABS 2, die-cut 4<br />
4.2 Drive battery --- Ready made 1 Not included<br />
4.3 Switch actuating rod Brass 1.5 1 Overlength<br />
4.4 Switch --- Ready made 1 Not included<br />
4.5 Collet Brass 2.2 x 7 x 5 1<br />
4.6 Grubscrew Steel M3 x 3 1<br />
4.7 Flexible boot for 4.3 Rubber Ready made 1<br />
4.8 Guide tube holder ABS 3, die-cut 2<br />
4.9 Grubscrew Steel M3 x 6 1<br />
4.10 Collet Brass 4.2 x 7 x 5 1<br />
4.11 Depth vane pushrod Brass 1.5 x 420 1<br />
4.12 Rudder pushrod Brass 1.5 x 495 1<br />
4.13 Depth vane servo --- Ready made 1 Not included<br />
4.14 Rudder servo --- Ready made 1 Not included<br />
4.15 Double-sided foam tape Plastic 1.6 x 19 x 50 8<br />
4.16 Receiver --- Ready made 1 Not included<br />
4.17 Motor controller --- Ready made 1 Not included<br />
4.18 Flexible boot for pushrods 4.11/.12 Rubber Ready made 2<br />
4.19 O-ring Rubber 85 O.D. 1<br />
58
Stage 5: the control system<br />
Part Description Material Size in mm No. Notes<br />
No.<br />
5.1 Fixed control surface Plastic Ready made 4 Inj. moulded<br />
5.2 Centre section Plastic Ready made 1 Inj. moulded<br />
5.3 Rear bottom <strong>hu</strong>ll section ABS 1.5 1 Vac. moulded<br />
5.4 Self-tapping screw Steel 2.2 x 6.5 3<br />
5.5 Locknut Brass M4 1<br />
5.6 Propeller Plastic 50 O.D. 1 Three-bladed<br />
5.7 Depth vane Plastic Ready made 1 Inj. moulded<br />
5.8 Rudder Plastic Ready made 1 Inj. moulded<br />
5.9 Tubular rivet Brass Ready made 4<br />
5.10 Self-tapping screw Steel 2.2 x 11 4<br />
5.11 Rudder horn Plastic Ready made 2 Inj. moulded<br />
5.12 Depth vane pushrod Brass 1.5 x 220 1<br />
5.13 Rudder pushrod Brass 1.5 x 220 1<br />
5.14 Guide tube Plastic 2.2 x 3.2 x 100 3<br />
5.15 Collet Brass 3.2 x 7 x 5 2<br />
5.16 Grubscrew Steel M3 x 3 2<br />
5.17 Switch pushrod Brass 1.5 1 Overlength<br />
5.18 Collet Brass 3.2 x 7 x 5 1<br />
5.19 Grubscrew Steel M3 x 3 1<br />
59
Stage 6: completing the <strong>hu</strong>ll<br />
Part Description Material Size in mm No. Notes<br />
No.<br />
6.1 Top rear <strong>hu</strong>ll section ABS 1.5 1 Vac. moulded<br />
6.2 Locating plate ABS 1.5 4 Vac. moulded<br />
6.3 Locating plate ABS 1.5 4 Vac. moulded<br />
6.4 Doubler ABS 1.5 4 Vac. moulded<br />
6.5 Self-tapping screw Steel 2.2 x 6.5 1<br />
6.6 Self-tapping screw Steel 2.2 x 6.5 4<br />
6.7 Self-tapping screw Steel 2.2 x 6.5 2<br />
6.8 Top centre <strong>hu</strong>ll section ABS 1.5 1 Vac. moulded<br />
6.9 Bottom centre <strong>hu</strong>ll section ABS 1.5 1 Vac. moulded<br />
6.10 Top front <strong>hu</strong>ll section ABS 1.5 1 Vac. moulded<br />
6.11 Bottom front <strong>hu</strong>ll section ABS 1.5 1 Vac. moulded<br />
6.12 Locating plate ABS 1.5 6 Vac. moulded<br />
6.13 Joint strip Plastic Ready made 2 Transfer<br />
6.14 Self-tapping screw Steel 2.2 x 6.5 4<br />
60
Stage 7: conning tower and forward depth vanes<br />
Part Description Material Size in mm No. Notes<br />
No.<br />
7.1 Conning tower ABS 1.5 1 Vac. moulded<br />
7.2 Conning tower bulkheads ABS 2, die-cut 2<br />
7.3 Conning tower bulkheads ABS 2, die-cut 2<br />
7.4 Conning tower bulkheads ABS 2, die-cut 2<br />
7.5 Front depth vane Pl./Br. Ready made 2 Inj. moulded<br />
7.6 Tubular rivet Brass 4 x 4 x 0.4 2<br />
7.7 Tiller Plastic Ready made 1 Inj. moulded<br />
7.8 Collet Brass 4 x 7 x 5 1<br />
7.9 Grubscrew Steel M3 x 6 1<br />
7.10 Front pushrod Brass 1.5 1 Overlength<br />
7.11 Connecting sleeve Brass 3.2 x 4 1 Cut to size<br />
7.12 Collet Brass 4 x 7 x 5 2<br />
7.13 Grubscrew Steel M3 x 6 2<br />
61
Stage 8: the automatic diving system<br />
Part Description Material Size in mm No. Notes<br />
No.<br />
8.1 Conning tower bulkhead ABS 3, die-cut 1<br />
8.2 Conning tower bulkhead ABS 3, die-cut 1<br />
8.3 Rivet nut Brass M2 2<br />
"HS" Jig screw Brass M2 x 35 1<br />
8.4 Screw Brass M2 x 20 2<br />
8.5 Nut Brass M2 2<br />
8.6 Doubler ABS 3, die-cut 2<br />
8.7 Vertical plate ABS 3, die-cut 2<br />
8.8 Collet Brass 4 x 7 x 5 1<br />
8.9 Grubscrew Steel M3 x 3 1<br />
8.10 Radar mast Brass tube 4 1 Overlength<br />
8.11 Solder tag Brass Ready made 2<br />
8.12 Sleeve Aluminium Ready made 1 Machined<br />
8.13 S-hook Brass Ready made 1<br />
8.14 Screw Brass M3 x 10 2<br />
8.15 Tubular rivet Brass 4 x 4 x 0.4 2<br />
8.16 Pushrod Brass 1.5 1 Overlength<br />
8.17 Self-tapping screw Steel 2.2 x 6.5 4<br />
8.18 Rivet nut Brass M2 1<br />
8.19 Ring bolt Brass M2 1 Ready made<br />
8.20 S-hook Brass Ready made 1<br />
8.21 Spring Steel Ready made 1<br />
8.22 Collet Brass 3 x 7 x 5 1<br />
8.23 Grubscrew Steel M3 x 3 1<br />
8.24 Radar screen ABS 1.5 1 Vac. moulded<br />
8.25 Collet Brass 4 x 7 x 5 1<br />
8.26 Grubscrew Steel M3 x 3 1<br />
8.27 Wire hoop Brass 1.5 1 As plan<br />
62
Stage 9: final work, balancing<br />
Part Description Material Size in mm No. Notes<br />
No.<br />
9.1 Conning tower depth vane ABS 2, die-cut 2<br />
9.2 Aerial Steel wire 0.8 x 500 1<br />
9.3 Top plate ABS 3, die-cut 1<br />
9.4 Valve, complete Steel Ready made 1<br />
9.5 Ballast, front Lead approx. 440 g 1 Not included<br />
9.6 Ballast, rear Lead approx. 350 g 1 Not included<br />
63
"0"<br />
64<br />
0.1<br />
0.1<br />
0.2<br />
300<br />
340 x 195 x 10
Table des matières<br />
<br />
1. Introduction ......................................................................................................................... 67<br />
2. Explication des symboles ..................................................................................................... 68<br />
3. Le principe de fonctionnement ............................................................................................. 68<br />
4. Caractéristiques techniques ................................................................................................. 69<br />
5. Consignes de securite .......................................................................................................... 69<br />
6. Accessoires .......................................................................................................................... 70<br />
7. Recommandations génerales convernant le montage .......................................................... 71<br />
8. Recommandations concernant la mise en peinture .............................................................. 71<br />
9. L’application des motifs de décoration ................................................................................. 72<br />
10. Recommandations concenant l’ensemble de radiocommande ............................................. 72<br />
11. Montage .............................................................................................................................. 73<br />
Stade 0: le berceau, pièces 0.1 et 0.2 ................................................................................... 73<br />
Stade 1: préparation du moteur, pièces 1.1 à 1.14 ................................................................. 73<br />
Stade 2: le tiroir du moteur et de l’ensemble de radiocommande, pièces 2.1 à 2.16 .............. 74<br />
Stade 3: montage du tube de plongée, pièces 3.1 à 3.4 ........................................................ 75<br />
Stade 4: mise en place de l’ensemble de réception, pièces 4.1 à 4.19 ..................................... 77<br />
Stade 5: l’unité de gouvernail, pièces 5.1 à 5.19 ................................................................... 78<br />
Essai de fonctionnement ...................................................................................................... 80<br />
Stade 6: finition de la coque, pièces 6.1 à 6.14 ...................................................................... 81<br />
Stade 7: le kiosque et le gouvernail de plongée avant, pièces 7.1 à 7.13 .................................. 83<br />
Stade 8: l’automatisme de plongée, pièces 8.1 à 8.27 .......................................................... 84<br />
Stade 9: finition, équilibrage, pièces 9.1 à 9.6 ....................................................................... 86<br />
12. Le réglage du dispositif de plongée automatique ................................................................. 87<br />
13. Pièces .................................................................................................................................. 88<br />
66<br />
Page
1. Introduction<br />
Chère cliente, cher client,<br />
Nous vous remercions de l’achat du présent produit !<br />
Afin de maintenir le produit en bon état et d’en assurer une exploitation sans risques,<br />
l’utilisateur doit absolument tenir compte de ce mode d’emploi et le respecter !<br />
Avant l’utilisation de ce produit, lisez attentivement le mode d’emploi entier et respectez<br />
toutes les instructions d’utilisation et consignes de sécurité !<br />
Tous les noms d’entreprises et appellations de produits contenus dans ce mode d’emploi sont des<br />
marques déposées des propriétaires correspondants. Tous droits réservés.<br />
En cas de questions, adressez-vous à notre service d’assistance technique :<br />
<br />
Tél.: 0892 897 777 Tél.: 0848/80 12 88<br />
Fax: 0892 896 002 Fax: 0848/80 12 89<br />
e-mail: support@conrad.fr e-mail: support@conrad.ch<br />
Du lundi au vendredi de 8h00 à 18h00 Du lundi au vendredi de 8h00 à 12h00 0 Uhr<br />
le samedi de 8h00 à 12h00 et de 13h00 à 17h00<br />
67
2. Explication des symboles<br />
68<br />
Un point d’exclamation attire l’attention sur les conseils importants de ce mode d’emploi,<br />
qui sont impérativement à respecter.<br />
Le symbole renvoie à des astuces et conseils d’utilisation spécifiques.<br />
<br />
3. Le principe de fonctionnement<br />
Au repos, le modèle est immergé environ jusqu’à la partie supérieure de la coque avec une faible poussée<br />
résiduelle et conserve une assiette stable.<br />
A faible vitesse, il reste dans cette position, la partie supérieure de la coque flottant au ras de l’eau.<br />
Si on augmente le régime du moteur et donc la vitesse, le sous-marin plonge automatiquement. Les<br />
ouvertures longitudinales de la coque permettent le passage de l’eau, entrée et sortie, ce qui évite la<br />
mise en place d’une pompe.<br />
Lorsqu’il a atteint une certaine profondeur et une certaine vitesse, l’eau provoque le déplacement vers<br />
l’arrière du pavillondu radar monté sur un axe rotatif et commandant l’automatisme de plongée. Ce<br />
déplacement est transmis mécaniquement aux gouvernails de plongée avant. Ces derniers prennent<br />
une incidence positive qui engage la remontée du sous-marin.<br />
Dès que le pavillon du radar est hors d’eau, les gouvernails de plongée avant retrouvent leur position<br />
initiale.<br />
Il est alors à nouveau possible de plonger, la durée de la plongée étant proportionnelle à la vitesse.<br />
Le sous-marin peut se piloter avec deux ou trois voies de commande. Avec une commande deux voies,<br />
la durée de la plongée est dépendante de la vitesse et du mécanisme de plongée.<br />
Avec une plus grande expérience de la plongée et du pilotage du sous-marin, il est possible d’asservir<br />
per radiocommande les gouvernails de plongée ce qui ouvre les perspectives suivantes:<br />
L’automatisme de plongée peut également se piloter sous l’eau, ce qui signifie qu’il est possible de<br />
déterminer la profondeur de plongée.En tirant le manche des gouvernails de plongée il est aussi possible<br />
d’atteindre des vitesses plus importantes en position émergée, sans que le sous-marin plonge.
4. Caractéristiques techniques<br />
Longueur hors tout: 900 mm<br />
environLargeur hors tout: 200 mm<br />
environLargeur du tube de plongée: 100 mm<br />
environHauteur hors tout: 320 mm<br />
environPoids: 4100 g environ<br />
<br />
5. Consignes de securite<br />
1. Pour le construction du modèle: n’utiliser que les colles recommandées à l’ intérieur<br />
du tube plongeur. Avant de fermer le tube plongeur, bien laisser sécher tous les points<br />
de collage.<br />
2. Ne pas charger les accus au plomb dans le tube plongeur fermé - danger d’explosion.<br />
Pour la charge, ouvrir le tube plongeur et retirer les accus. Respecter impérativement<br />
les consignes de charge.<br />
Pendant la charge des accus, il peut se produire que de l’hydrogène inflammable<br />
s’échappe de la vanne de sécurité intégrée (de l’accu).<br />
Avant d’installer les accus, les laisser rester au moins une heure.<br />
3. Après avoir refermé le tube plongeur juste avant mise en service, effectuer un essai<br />
d’étanchéité en soufflant dans la vanne. Pour ce faire, installer un morceau de flexible<br />
silicone sur la vanne et souffler avec la bouche. Veiller à ne pas appliquer une trop<br />
forte pression sur le tube plongeur. N’utiliser en aucun cas une pompe à vélo ou une<br />
pompe à air comprimé.<br />
4. Une fois que la séance est terminée et pour stocker le modèle, ouvrir le tube plongeur.<br />
69
6. Accessoires<br />
Accessoires nécessaires non contenus dans le kit :<br />
N° Désignation Nombre de pièces<br />
4.2 Accu moteur 1<br />
4.4 Interrupteur 1<br />
4.13 Servo 1<br />
4.14 Servo 1<br />
4.16 Récepteur 1<br />
4.17 Régulateur de vitesse à partier de 20A 1<br />
--- Graisse de précision ---<br />
Ensemble de radiocommande recommandé<br />
Tout ensemble de radiocommande à partir de deux voies en 27 MHz ou 41 MHz en relation avec un<br />
servo et un régulateur de vitesse électronque.<br />
Si le gouvernail de plongée est également asservi par la radiocommande, une radiocommande à quatre<br />
voies s’impose avec deux servos.<br />
Colles appropriées<br />
Type de colle Pour coller<br />
Deux composants bois, métal, plastique<br />
Cyanoacrylate tous matériaux<br />
Peintures adaptées<br />
Peintures à base de résine synthétique ou acylique.<br />
70
7. Recommandations génerales<br />
<br />
convernant le montage<br />
La numérotation des pièces correspond en règle générale à leur ordre d’intervention dans la construction,<br />
le numéro se trouvant devant le point indique le stade de montage en cours alors que le numéro qui<br />
suit le point désigne la pièce.<br />
Avant d’entreprendre la construction du modèle, lire attentivement la notice en se référant au plan,<br />
aux croquis de détail et à la liste de pièces afin de se faire une idée d’ensemble du montage.<br />
Les parties à couper sur les éléments moulés sont hac<strong>hu</strong>rées sur le plan ou directement sur la pièce<br />
concernée.<br />
Les contours extérieurs de la coque ne sont pas marqués car seules les parties horizontales sont à<br />
couper.<br />
Après avoir coupé les éléments indiqués, poncer proprement avec du papier de verre.<br />
Un croquis d’identification „0“ agrafé au centre de cette notice permet d’identifier plus aisément les<br />
pièces estampée.<br />
Ne détacher les pièces estampées de leur planche que lorsqu’elles interviennent dans le<br />
montage et les poncer avant de les mettre en place.Les données directionnelles comme<br />
gauche et droite, par exemple, sont considérées dans le sens de déplacement du sousmarin.<br />
<br />
8. Recommandations concernant<br />
<br />
la mise en peinture<br />
Avant de les peindre, nettoyer les pièces en plastique avec un diluant pour résines synthétiques (pas<br />
de nitrométhane) et les poncer ensuite légèrement avec un papier de verre très fin.<br />
Avant d’appliquer la peinture il est recommandé de boucher tous les joints avec un excellent mastic<br />
plastique, appliquer ensuite un fond avant mise en peinture.<br />
Si vous souhaitez appliquer un décor multicolore, délimiter les zones de coloris avec du ruban adhésif,<br />
pas de Tesa Krepp.<br />
Il faut ensuite retirer les bandes de ruban adhésif avant que la peinture soit sèche.<br />
Pour peindre, utiliser d’excellents produits acryliques ou à base de résine synthétique.Pour l’application<br />
de la peinture les photos du sous-marin figurant sur le carton d’emballage peuvent servir de modèle.<br />
71
9. L’application des motifs de décoration<br />
72<br />
Pour la mise en place des autocollants vous pouvez également vous reporter aux photos<br />
du carton d’emballage.<br />
• Remplir une bassine en plastique relativement grande d’eau à peine tiède (20ø environ) et y ajouter<br />
quelques giclées de détergent pour la vaisselle.<br />
• Mouiller légèrement une éponge avec cette préparation.<br />
• Humidifier les endroits destinés à recevoir ces autocollants sur le modèle.<br />
• Retirer les autocollants et les tremper dans la bassine, les installer ensuite sur le sous-marin et les<br />
tamponner avec un chiffon sec.<br />
• Lorsque l’eau est sèche sous les éléments du décor, les tamponner une nouvelle fois avec un chiffon<br />
sec.<br />
<br />
10. Recommandations concenant<br />
<br />
l’ensemble de radiocommande<br />
Un ensemble de radiocommande deux voies est suffisant, toutefois, si on souhaite asservir le gouvernail<br />
de plongée il est nécessaire d’employer un ensemble de radiocommande quatre voies.<br />
L’ensemble est alimenté par l’accu du moteur, d’o— la nécessité d’employer un régulateur de vitesse à<br />
partir de 20 ampères, courant continu, avec un dispositif intégré d’alimentation du récepteur.<br />
Il est recommandé d’installer dans le modèle les composants présentés.<br />
Si vous utilisez des éléments autres que ceux indiqués, reportez-vous au schéma électrique et rectifiez<br />
les différences d’encombrement.
11. Montage<br />
Stade 0: le berceau, pièces 0.1 et 0.2<br />
Fabriquer un berceau solide de manière à ce que le sous-marin dispose d’une assise stable en cours de<br />
montage. Reporter le croquis des montants 0.1 à l’échelle 1 sur une planche correspondante et les scier<br />
avant de les coller sur l’embase 0.2.<br />
Le matériel nécessaire à la réalisation du berceau n’est pas fourni, les cotes sont données<br />
par les croquis.<br />
Recouvrir les montants de feutre ou de mousse plastique afin de ne pas détériorer ou gratter la coque<br />
du sous-marin.<br />
Stade 1: préparation du moteur, pièces 1.1 à 1.14<br />
• Pour les opérations d’installation électrique tenir compte du schéma de principe.<br />
• Retirer le manteau de fer doux du moteur électrique 1.1, il ne sera pas employé.<br />
• Antiparasiter le moteur électrique. Pour ce faire, munir systématiquement les jambes des<br />
condensateurs 1.2 d’une gaine isolante 1.4 et les souder, l’une, sur une des bornes du moteur et<br />
l’autre sur le carter du moteur à un endroit préalablement poncé.<br />
• Munir ensuite l’autre condensateur 1.3 de gaines isolantes et les souder en pontage sur les deux<br />
broches du moteur.<br />
• Souder les fils d’alimentation du moteur 1.5 sur les broches du moteur.<br />
• Préparer les fils de raccordement de l’alimentation avec douille 1.6 et fiche AMP-Faston 1.7.<br />
• Vérifier le sens de rotation du moteur à l’aide de l’ensemble de radiocommande. Pour ce faire,<br />
connecter le régulateur de vitesse et l’ensemble de radiocommande selon les indications des notices<br />
qui les accompagnent.<br />
• Connecter l’alimentation du moteur. Tenir compte des polarités aumoment de connecter<br />
l’alimentation.<br />
• Amener le manche des gaz, sur l’émetteur, en position "marche avant". Le moteur doit alors tourner<br />
vers la droite lorsqu’on regarde le pignon de sortie, c’est-à-dire dans le sens des aiguilles d’une<br />
montre.<br />
Si le moteur tourne dans l’autre sens, inverser les fils sur les broches du moteur.<br />
• Percer les trous pour les tringles avec un foret de "d" 3,2 mm.<br />
73
• Percer le trou central (en procédant progressivement) du capot du tube de plongée arrière 1.8 jusqu’à<br />
"d" 6,5 mm.<br />
• Glisser le tube d’étambot 1.9 avec carter d’engrenage par le capot du tube de plongée.<br />
• Limer le support du raccord de lubrification 1.10 dans sa partie inférieure de manière semi-circulaire<br />
à la forme du tube d’étambot et le souder au tube d’étambot selon les indications du plan.<br />
• Percer ensuite le tube d’étambot au travers du support avec un foret de "d" 3 mm. Souffler les<br />
copeaux.<br />
• Coller le raccord de lubrification 1.11 sur le support en enduisant le bord du raccord de colle Stabilit-<br />
Express avant de le mettre en place.<br />
• Introduire l’arbre d’hélice 1.12 dans le tube d’étambot. Lubrifier la couronne avec de la graisse au<br />
teflon.<br />
• Poser le couvercle 1.13 du carter dans le carter d’engrenage. Mettre le moteur en place et le fixer<br />
avec les vis 1.14.<br />
Stade 2: le tiroir du moteur et de l’ensemble de radiocommande<br />
pièces 2.1 à 2.16<br />
• Engager l’écrou 2.1 sur la tige filetée 2.2.<br />
• Percer la fente transversale pour l’écrou 2.1 dans la platine - tiroir 2.3 selon les marques imprimées<br />
et limer à angle droit. Pratiquer ensuite seulement la fente longitudinale pour la tige filetée. Coller la<br />
fente sur une face avec un morceau de ruban adhésif.<br />
• Disposer la platine-tiroir 2.3 sur un support plan de telle manière que les fentes pour l’écrou et pour<br />
la tige filetée se trouvent exactement au-dessus du bord.<br />
• Régler l’écrou sur la tige filetée en fonction de la fente transversale. Mettre la tige filetée en place.<br />
Après avoir enduit les fentes de Stabilit-Express, coller ensemble l’unité 2.1/2.2.<br />
• Pratiquer les ouvertures pour l’accu et pour le carter d’engrenage.<br />
• Munir le couple 2.4 d’une ouverture pour les fils de connexion du moteur 1.5.<br />
• Installer la platine-tiroir 2.3 sur un support plan.<br />
• Positionner les deux couples 2.4 et 2.5 sur la platine 2.3 selon les indications du croquis, les ajuster<br />
à angle droit et les coller avec de la colle cyanoacrylate.<br />
• Glisser les rails profilés 2.6 non coupés au travers des couples et les fixer avec de la colle<br />
cyanoacrylate. Coller ensuite les rails profilés à la platine et aux couples en y faisant couler une<br />
goutte de colle cyanoacrylate.<br />
• Couper ensuite les saillies avant et arrière des rails en fonction du contour de la platine-tiroir. Poncer<br />
les rails et les biseauter à la forme du contour interne du capot du tube de plongée.<br />
• Coller les équerres avant et arrière 2.7 et 2.8 selon les indications du plan. Les équerres doivent<br />
s’appuyer sur les rails profilés.<br />
74
• Coller les deux plaquettes-entretoises 2.9 à fleur du bord intérieur de la fente arrière, pour le tube<br />
d’étambot.<br />
• Coller le support 2.10 pour le tube d’étambot sur les plaquettes 2.9.<br />
• Coller les plaquettes-supports 2.11 en butée contre les pièces 2.9/2.10.<br />
• Installer le moteur par dessous dans l’ouverture de la platine-tiroir. Le cas échéant, poncer un peu<br />
plus les plaquettes-supports 2.11.<br />
• Percer les trous de "d" 1,5 mm pour les vis autotaraudeuses 2.13, simultanément ,dans les flasques<br />
du carter d’engrenage et dans les plaquettes 2.11.<br />
• Retirer le moteur et porter uniquement les trous du carter d’engrenage à "d" 2,5 mm.<br />
• Remettre le moteur en place et le fixer avec les rondelles 2.12 et les vis autotaraudeuses 2.13.<br />
• Glisser le capot du tube de plongée arrière 1.8 sur la platine•tiroir sans le coller toutefois. La platinetiroir<br />
doit s’engager dans la fente intérieure du capot de tube de plongée.<br />
• Pratiquer l’ouverture et les trous dans le couple de l’interrupteur2.14 selon l’interrupteur prévu.<br />
Ajuster le couple de l’interrupteur et le fixer avec de la colle cyanoacrylate mais uniquement au<br />
support de tube d’étambot 2.10.<br />
• Munir le tube-guide 2.15 à l’avant d’une fente rectangulaire de 3 mm de largeur environ et de 5 mm<br />
de longueur - croquis de détail "Z".<br />
• Couper les tubes-guides 2.15 et 2.16 selon les indications du croquis, les poncer aux endroits qui<br />
seront collés et les glisser dans les trous latéraux du capot du tube de plongée. Tirer le capot du<br />
tube de plongée vers l’arrière et coller les tubes-guides avec de la colle cyanoacrylate.<br />
Stade 3: montage du tube de plongée, pièces 3.1 à 3.4<br />
Repère rouge<br />
Coque épaisse 3.2<br />
Le repère rouge indique la face arrière de la coque épaisse 3.2<br />
• Couper le rail profilé 3.1 exactement à 320 mm.<br />
• Le rail profilé sera collé avec un interstice de 13 mm par rapport au bord avant du tube de plongée.<br />
Marquer ces 13 mm à l’intérieur, à l’avant.<br />
75
• Installer le rail 3.1 dans le tube de plongée 3.2 et tenir compte de la marque de 13 mm.<br />
• Fixer le tube de plongée sur le chantier de telle sorte qu’il ne puisse rouler. Glisser une règle métallique<br />
près du profilé 3.1 afin de pouvoir ajuster le profilé de manière parfaitement droite.<br />
Le profilé ne doit pas se trouver de biais dans le tube de plongée ou présenter des ondulations.<br />
• Fixer le profilé à l’avant et à l’arrière avec une goutte de colle cyanoacrylate. En laissant la règle en<br />
place, déposer une goutte de colle cyanoacrylate sur l’autre face et la faire couler le long du profilé.<br />
76<br />
Attention: ne pas coller la règle métallique.<br />
• Glisser la platine-tiroir dans le tube de plongée et vérifier l’aisance du coulissage sur le rail 3.1.<br />
• Glisser le tube de plongée avec le capot arrière du tube de plongée jusqu’au raccord de lubrification.<br />
• Glisser le capot avant du tube de plongée 3.3 sur la tige filetée 2.2 en veillant à ce que la platinetiroir<br />
s’introduise dans la fente du capot.<br />
• Fixer le capot avant avec l’écrou autobloquant 3.4 sans le serrer toutefois.<br />
• Glisser le tube de plongée jusqu’en butée vers l’avant sur le capot. Mettre le capot arrière du tube<br />
de plongée en place. Les deux capots doivent s’installer sans présenter de jour sur le tube de plongée.<br />
• Sur le tube de plongée et sur le capot avant du tube de plongée, tracer une ligne commune: Ainsi la<br />
disposition des éléments les uns par rapport aux autres est définie de telle manière qu’il ne soit pas<br />
possible ultérieurement de les coller avec un décalage.<br />
• Dévisser l’écrou 3.4, retirer le tube de plongée par l’avant avec le capot avant.<br />
• Remettre le capot arrière à nouveau en place en veillant à ce que la platine-tiroir s’engage dans la<br />
fente.<br />
• Coller la platine-tiroir et le couple de l’interrupteur au capot arrière du tube de plongée avec de la<br />
Stabilit-Express. Avant que la colle ne soit sèche, mettre le tube de plongée avec le capot avant en<br />
place afin de pouvoir ajuster l’ensemble.<br />
• Jusqu’au séchage complet des points de collage installer le sous-marin verticalement en introduisant<br />
par exemple le tube d’étambot dans le goulot d’une bouteille. On évitera ainsi à la colle de couler.<br />
• Retirer à nouveau la totalité de la partie avant.<br />
• Bien boucher les points de collage intérieurs avec de la colle Stabilit-Express au niveau du capot<br />
arrière du tube de plongée. Coller simultanément les tubes-guides 2.15 et 2.16 au capot du tube de<br />
plongée.<br />
• Bien coller le tube d’étambot à l’extérieur au capot du tube de plongée avec un bon congé de colle.<br />
• Coller le capot avant du tube de plongée et également le bord avant supérieur du tube de plongée<br />
avec du ruban adhésif transparent.<br />
• Bien enduire de silicone le bord intérieur du capot avant 3.3 du tube de plongée et la partie avant du<br />
tube de plongée. Installer la capot sur le tube de plongée et l’y appuyer afin que ne subsiste plus<br />
aucun jour. Les deux marques pratiquées antérieurement doivent se couvrir parfaitement.<br />
• Bien laisser sécher le silicone ce qu’il est facile de constater si la colle déborde. Il faut veiller à une<br />
bonne aération des deux parties. Lorsque le silicone est sec, retirer les bandes de ruban adhésif et<br />
l’excédent de colle.
Stade 4: mise en place de l’ensemble de réception, pièces 4.1 à 4.19<br />
Remarque:<br />
Si le gouvernail de plongée est commandé mécaniquement, le servo de plongée 4.13 n’est<br />
pas mis en place. Si le gouvernail de plongée est commandé par le servo, le goujon 4.9 et<br />
l’anneau de serrage 4.10 ne sont pas utilisés.<br />
Toutes les autres pièces et toutes les autres opérations de montage sont maintenues pour<br />
les deux versions. De cette manière, il est possible de commencer à piloter le modèle avec<br />
un dispositif de plongée mécanique puis, en fonction des habitudes de pilotage de passer<br />
à une commande du gouvernail de plongée.<br />
• Poncer chaque fois les supports d’accu de 2 mm d’épaisseur 4.1 sur chaque bord de telle manière<br />
qu’ils puissent s’engager dans les fentes de l’accu 4.2 sans tension.<br />
• Glisser les quatre supports en butée vers le haut et les fixer avec de la colle cyanoacrylate.<br />
• Couder la tringle de renvoi 4.3 pour l’interrupteur à une de ses extrémités selon la vue du dessus et<br />
l’introduire de l’intérieur par le trou interne du capot arrière du tube de plongée.<br />
• Monter l’interrupteur 4.4 de telle manière que, en coulissant vers l’arrière, c’est-à-dire en tirant sur<br />
la tringle il se trouve en position "en". S’il arrivait ultérieurement, en cours fonctionnement, que le<br />
sous-marin reste bloqué, il est ainsi certain que l’ensemble de réception reste en fonction.<br />
• Marquer le trou transversal sur le coulisseau de l’interrupteur selon les indications du croquis de<br />
détail "Y" et prépercer avec un foret de "d" 1,5 mm puis porter le trou à 2 mm.<br />
• Introduire la tringle 4.3 par-dessous dans le trou puis couder la tringle en fonction des indications.<br />
• Fixer la tringle avec l’anneau de serrage 4.5 et le goujon 4.6. Couper la tringle selon les indications<br />
du plan et bien poncer la coupe.<br />
• Bien <strong>hu</strong>midifier le soufflet 4.7 de l’intérieur, de préférence avec de l’eau additionnée de quelques<br />
gouttes de détergent pour la vaisselle.<br />
• Glisser le soufflet 4.7 vers l’avant sur la tringle 4.3 jusqu’au support du capot de tube de plongée<br />
1.8. Régler le soufflet sur une longueur totale de 50 mm environ.<br />
• Installer l’accu 4.2 pour essai dans l’ouverture prévue de la platine-tiroir.<br />
• Percer les supports 4.8 pour les tubes-guides 2.15 et 2.16 avec un foret de "d" 3,2 mm, les introduire<br />
par l’avant et les ajuster selon la vue du dessus.<br />
Le bord extérieur du support ne doit pas dépasser le bord de la platine-tiroir. Coller le<br />
support.<br />
• Glisser sur le tube-guide 2.15 de la tringle de renvoi du gouvernail de profondeur un anneau de<br />
serrage 4.10 préalablement pourvu d’un goujon 4.9 en ne serrant que légèrement.<br />
• Couper la tringle de profondeur 4.11 à 420 mm et la tringle de direction 4.12 à 495 mm. Bien ébarber<br />
les points de coupe.<br />
77
• Munir chacune des gouvernes 4.11 et 4.12 d’un coudage en "Z" et les accrocher dans les palonniers<br />
des servos 4.13 et 4.14 correspondants.<br />
• Engager la tringle de profondeur 4.11 dans le tube-guide 2.15. Installer le servo 4.13 selon les<br />
indications de la vue du dessus et les fixer avec deux bandes d’adhésif double face 4.15 sur la platine<br />
2.3, de telle manière que la tringle se présente vers<br />
l’arrière, sans tension et parfaitement droite.<br />
• Si le gouvernail de profondeur n’est pas directement commandé, régler la tringle 4.11 selon la vue<br />
du dessus et serrer le goujon 4.9 de l’anneau de serrage 4.10 - croquis de détail "Z".<br />
• Installer également la tringle de direction 4.12 avec le servo 4.14 et fixer avec deux bandes d’adhésif<br />
double face 4.15.<br />
• Fixer le récepteur 4.16 et le régulateur de vitesse 4.17 avec de l’adhésif double face 4.15.<br />
• Connecter l’ensemble de radiocommande et l’accu selon les indications de la notice qui les<br />
accompagne et selon le schéma électrique. Fixer les fils de connexion du moteur, du régulateur de<br />
vitesse et de l’interrupteur avec un morceau d’adhésif double face sur le régulateur de vitesse.<br />
• La douille de charge doit rester parfaitement accessible. Rassembler tous les fils électrique avec<br />
une gaine isolante ou un ligament et les disposer proprement dans la coque.<br />
• Amener les servos au neutre à l’aide de l’ensemble de radiocommande.<br />
• Comme décrit précédemment, installer les soufflets 4.18, trempés dans l’eau, sur les tringles 4.13 et<br />
4.14 et les régler sur 50 mm. Veiller à ce que les servos conservent leur position neutre. Coller les<br />
soufflets 4.7 et 4.18 avec de la colle cyanoacrylate aux tringles et aux raccords du capot du tube de<br />
plongée de manière à ce qu’ils soient parfaitement étanches.<br />
• Retirer l’accu 4.2. Glisser le joint torique 4.19 sur le capot arrière du tube de plongée.<br />
• Munir le tube de plongée 3.2 du capot avant 3.3. Serrer l’écrou autobloquant 3.4 assez fortement de<br />
manière à ce que le joint torique 4.19 soit légèrement comprimé.<br />
Stade 5: l’unité de gouvernail, pièces 5.1 à 5.19<br />
• Introduire les quatre stabilisateurs 5.1 par l’arrière dans les guides de la partie centrale 5.2.<br />
• Coller les stabilisateurs chaque fois à l’avant dans la fente avec une goutte de colle cyanoacrylate.<br />
• Ebarber le trou de la partie centrale à l’avant avec un foret.<br />
• Glisser l’unité 5.1/5.2 sur le tube d’étambot de telle sorte que le manchon-palier soit visible de<br />
l’arrière.<br />
• Pour ajuster l’unité de stabilisation, installer le modèle dans le berceau.<br />
• Ajuster le tube de plongée 3.2 de telle sorte que les raccords gauche et droit du capot avant du tube<br />
de plongée présentent un interstice identique par rapport au chantier - X droite = X gauche.<br />
• Faire pivoter ensuite l’unité de stabilisation sur le tube d’étambot de telle sorte que les stabilisateurs<br />
horizontaux présentent également un interstice identique par rapport au chantier - Y droite = Y<br />
gauche. Pour vérifier, tester également la position verticale des stabilisateurs verticaux.<br />
78
• Coller la partie centrale 5.2 à l’avant au tube d’étambot avec de colle Stabilit-Express. Veiller à ce<br />
que la colle ne s’engage pas dans le tube d’étambot.<br />
Remarque concernant la suite des opérations sur la coque:<br />
Pour percer les trous destinés aux vis autotaraudeuses, percer d’abord avec un foret de<br />
"d" 1,5 mm simultanément dans les deux pièces. Porter ensuite le trou à "d" 2,5 mm mais<br />
uniquement dans la pièce se trouvant à l’extérieur. La procédure ne sera plus décrite cidessous.<br />
Les percements longitudinaux destinés au remplissage de la coque et à sa vidange seront<br />
ouverts progressivement de "d" 1,5 mm à 3 mm.<br />
• Percer puis limer les trous longitudinaux inférieurs pour l’écoulement de l’eau dans la partie arrière<br />
inférieure de la coque 5.3 en fonction des marques.<br />
• Percer ensuite les trois trous longitudinaux dans la partie arrière pour le passage des tringles et les<br />
limer en fonction de la disposition des tringles.<br />
• Couper la pièce 5.3 en fonction des marques et l’ajuster à l’unité de stabilisation de telle sorte<br />
qu’elle forme un joint parfait. La fente et l’ouverture vers l’arrière sont intentionnelles. Limer les<br />
trous longitudinaux latéraux exactement à la forme du contour.<br />
• Poncer le bord avant de la pièce 5.3 de telle manière qu’elle s’ajuste exactement au bord intérieur<br />
du capot arrière du tube de plongée.<br />
• Fixer la partie arrière de la coque avec de la colle cyanoacrylate par l’intérieur à l’unité de stabilisation.<br />
Boucher ensuite avec de la colle Stabilit-Express.<br />
• Faire tourner le modèle dans le berceau et ajuster la partie arrière de la coque de manière<br />
parfaitement horizontale.<br />
• Percer un trou de "d" 1,5 mm exactement au milieu dans la pièce 5.3 et le bord du capot du tube de<br />
plongée 1.8. Ne pas percer le capot proprement dit. Tenir compte de cette remarque également<br />
pour les trous percés ultérieurement dans cette zone. Tenir absolument compte de la cote de 10<br />
mm.<br />
• Fixer la pièce 5.3 avec une vis autotaraudeuse au capot du tube de plongée.<br />
• Percer les deux trous latéraux et fixer la partie arrière de la coque avec deux autres vis<br />
autotaraudeuses 5.4.<br />
• Engager le contre-écrou 5.5 sur l’arbre d’hélice, maintenir un interstice de 0,5 mm par rapport au<br />
palier du tube d’étambot.<br />
• Raccourcir le moyeu de l’hélice 5.6 selon la vue du dessus. Bien nettoyer la coupe. Engager l’hélice<br />
sur l’arbre d’hélice et contrer avec l’écrou 5.5.<br />
• Fixer le gouvernail de profondeur 5.7 et le gouvernail de direction 5.8 avec les rivets 5.9 et les vis<br />
autotaraudeuses 5.10 aux stabilisateurs de manière à ce qu’il restent parfaitement mobiles.<br />
• Couper les tétons des guignols 5.11 et poncer la zone de coupe à plat. Percer systématiquement le<br />
trou intérieur des guignols avec un foret de "d" 1,5 mm.<br />
• Couper les deux tringles 5.12 et 5.13 (220 mm), les couder en "z" à l’une des extrémités et les<br />
accrocher dans les guignols.<br />
79
• Couper les trois tubes-guides 5.14 (100 mm).<br />
• Glisser deux des tubes-guides sur les tringles 5.12 et 5.13.<br />
• Introduire les tubes-guides avec les tringles dans les trous longitudinaux de la pièce 5.3.<br />
• Raccorder entre-elles les tringles 4.11 et 5.12 puis 4.12 et 5.13 à l’aide des bagues de serrage 5.15 et<br />
des goujons 5.16.<br />
• Maintenir les guignols sur les gouvernails. Les tringles doivent autant que possible présenter une<br />
ligne droite sans subir de tension. Le cas échéant retravailler les trous longitudinaux de la pièce 5.3.<br />
• Les guignols sont à placer sur les gouvernails de telle sorte que les tringles se trouvent hors du<br />
plan de rotation de l’hélice.<br />
• Desserrer les goujons 5.16 coller les guignols avec de la colle cyanoacrylate lorsque les gouvernails<br />
se trouvent en position neutre. Attention: les trous dans les guignols et donc les tringles doivent se<br />
trouver exactement au niveau de l’axe de rotation des gouvernails - tenir compte de la ligne pointillée<br />
de lla vue du dessus et de la vue latérale.<br />
• Couder la tringle de l’interrupteur 5.17 à une de ses extrémités et y glisser le troisième tube-guide<br />
5.14.<br />
• Introduire la tringle dans le trou longitudinal inférieur et la raccorder à la tringle 4.3 à l’aide de la<br />
bague de serrage 5.18 et du goujons 5.19.<br />
• Coller les tubes-guides dans la queue de la coque.<br />
Essai de fonctionnement<br />
• Pratiquer un essai de fonctionnement. Mettre d’abord l’émetteur en fonction. Le manche du<br />
régulateur de vitesse doit se trouver en position "moteur coupé".<br />
• Mettre le récepteur en fonction en tirant la tringle 5.17 vers l’arrière.<br />
80<br />
Attention:<br />
étant donné que l’ensemble de réception et le moteur sont alimentés simultanément par<br />
l’accu 4.2 le moteur démarre brièvement lors de la mise sous tension. Ne pas avancer les<br />
mains dans le plan de rotation de l’hélice - danger de blessure.<br />
• Les gouvernails doivent se trouver parfaitement en position neutre lorsque les servos sont au<br />
"neutre" (manches et trims correspondants en position médiane).<br />
• Si une correction s’avère nécessaire, desserrer le goujon 5.16, correspondant, déplacer la tringle en<br />
conséquence et resserrer le goujon.<br />
• Vérifier le débattement des gouvernes et le sens de déplacement des servos. Si une fonction s’avérait<br />
inversée, utiliser le dispositif d’inversion de la course des servos sur l’émetteur.<br />
• Vérifier une nouvelle fois le sens de rotation du moteur. En marche avant, l’hélice vue de l’arrière,<br />
doit tourner vers la gauche.
Stade 6: finition de la coque, pièces 6.1 à 6.14<br />
• Percer les trous longitudinaux supérieurs dans la partie arrière de la coque 6.1 selon les marques<br />
puis les limer.<br />
• Découper la partie supérieure de l’arrière de la coque selon les marques . Pour un ajustage précis, la<br />
partie présente sur chaque bord une saillie d’environ 3 mm.<br />
• Découper avec précision les fentes pour les stabilisateurs 5.1.<br />
• Pour pouvoir découper avec précision et assurer un ajustage parfait de la partie supérieure 6.1 sur<br />
la partie inférieure 5.3, desserrer les vis autotaraudeuses latérales 5.4. Installer la partie supérieure<br />
6.1 de telle manière que les bords longitudinaux encore en saillie se glissent entre le capot du tube<br />
de plongée et les bords de la partie inférieure.<br />
La partie 6.1 doit se trouver à fleur du bord intérieur du capot arrière du tube de plongée et en ligne<br />
par rapport au tube de plongée.<br />
• De cette manière il est possible de marquer la bordure de coupe de la pièce 6.1 en fonction des<br />
bords de la pièce 5.3.<br />
• Retirer la partie 6.1, en la découpant et en nettoyant ses bords au papier de verre l’adapter<br />
parfaitement à la partie inférieure.<br />
• La description de cette opération est également valable ultérieurement pour la préparation des<br />
parties centrales et des parties avant.<br />
• Remettre les vis autotaraudeuses latérales 5.4 en place.<br />
• Découper selon les marques les plaquettes de verrouillage 6.2 et 6.3 pour la partie inférieure et la<br />
partie supérieure de l’arrière de la coque 5.3 et 6.1 dans les c<strong>hu</strong>tes semi-circulaires de la partie<br />
avant de la pièce 5.3.<br />
• Coller les plaquettes 6.2 selon les indications du plan dans la partie inférieure arrière de telle sorte<br />
qu’environ la moitié de la longueur du matériau dépasse.<br />
• Marquer à l’extérieur la position des plaquettes supérieures 6.3 entre les plaquettes inférieures 6.2<br />
et les trous longitudinaux de la partie inférieure arrière de la coque. Coller les plaquettes 6.3 à<br />
l’intérieur dans la partie supérieure.<br />
• Mettre la partie supérieure 6.1 en place en veillant à ce qu’elle s’adapte parfaitement, sans jour, à la<br />
partie inférieure. Le cas écheant couder légèrement les plaquettes dans l’arrondi.<br />
• Selon les indications du plan, couder les renforts 6.4 quiserviront ultérieurement de supports de<br />
vissage et les coller sur les plaquettes correspondantes 6.2.<br />
• Par le haut, percer un trou de "d" 1,5 mm au travers de la partie arrière de la coque 6.1 et le bord<br />
du capot du tube de plongée et fixer la pièce 6.1 avec la vis autotaraudeuse 6.5.<br />
• Percer les trous arrière dans la zone des gouvernails avec un foret de "d" 1,5 mm.<br />
• Marquer la position des autres trous à percer. Percer simultanément la partie supérieure arrière de<br />
la coque 6.1 et les plaquettes avec les renforts 6.4.<br />
• Engager les vis autotaraudeuses arrière 6.6.<br />
• Percer les trous pour les vis autotaraudeuses 6.7 dans la partie arrière de la coque 6.1 en veillant<br />
à marquer également le bord du capot du tube de plongée - sans le percer toutefois.<br />
81
• Retirer la partie arrière de la coque et alors seulement percer le bord du capot du tube de plongée.<br />
• Remettre la partie arrière du capot de nouveau en place et la fixer avec les vis autotaraudeuses 6.5-<br />
6.7.<br />
• Percer puis limer les trous longitudinaux dans la partie centrale supérieure de la coque 6.8. Découper<br />
ensuite cette partie selon les marques et en poncer les bords.<br />
• Mettre le modèle en place dans son berceau et, comme décrit précédemment l’installer de manière<br />
parfaitement horizontale. Pour travailler avec précision mesurer à nouveau la hauteur des<br />
gouvernails.<br />
• Installer la partie centrale supérieure de la coque sur le tube de plongée et l’ajuster parallèlement<br />
par rapport aux stabilisateurs.<br />
• Marquer la position de 6.8 sur chaque bord du tube de plongée.<br />
82<br />
Veiller à ce que, par rapport à la partie supérieure arrière de la coque, il subsiste un jour<br />
d’environ 2 mm faute de quoi le joint torique 4.19 ne pourra pas subir de pression.<br />
• Coller la pièce 6.8 uniquement au centre du tube de plongée, et non sur les bords, et le capot de<br />
tube de plongée avant avec une couche régulière mais fine de Stabilit-Express.<br />
Ne pas coller le capot de tube de plongée arrière ni le joint torique.<br />
• Découper la partie centrale inférieure de la coque 6.9 selon les marques et l’installer dans le tube de<br />
plongée de telle sorte que les bords de la partie supérieure de la coque dépassent. Ajuster a partie<br />
centrale sur toute sa longueur, sur chaque bord, par rapport à la partie supérieure. La pièce 6.9 doit<br />
parfaitement couvrir la surface du tube de plongée.<br />
• Coller la partie centrale inférieure et la partie centrale supérieure au tube de plongée mais pas aux<br />
capots du tube de plongée. Fixer la partie inférieure avec une bande de ruban adhésif qui la couvre<br />
sur toute sa longueur.Veiller une nouvelle fois à ce que l’ensemble ne présente pas de jour.<br />
• Munir la partie avant supérieure de la coque 6.10 et la partie avant inférieure de la coque 6.11 des<br />
trous longitudinaux. Ne pas encore percer les trous pour le gouvernail de plongée avant.<br />
• Installer la pièce 6.10 sur le bord du capot avant du tube de plongée et l’ajuster avec une règle par<br />
rapport à la partie centrale. Fixer la partie avant 6.10 avec des bandes de ruban adhésif dans cette<br />
position.<br />
Il est possible de coller simultanément la règle, elle servira de support.<br />
• Ajuster la partie avant inférieure de la coque 6.11 de manière à ce qu’elle ne présente pas de jour et<br />
la placer en butée contre la partie avant supérieure de la coque.<br />
• Maintenir les deux partie ensemble à l’aide de bandes de ruban adhésif appliquées sur toute la<br />
longueur.<br />
• Installer le nez de la coque ainsi préparé, pour essai, sur la coque et vérifier qu’il s’adapte sans<br />
présenter de jour par rapport au capot du tube de plongée et par rapport à la partie centrale de la<br />
coque.
• Coller les pièces 6.10 et 6.11 de l’intérieur avec des points de colle cyanoacrylate. Coller les plaquettes<br />
de verrouillage 6.12 à l’intérieur en veillant à ce qu’aucune plaquette ne se trouve dans la zone du<br />
capot du tube de plongée. Coller ensuite les éléments avec un bon congé de colle Stabilit-Express.<br />
• Coller les bandes adhésives 6.13 qui se trouvent sur la feuille d’autocollants de décoration, en bordure<br />
du capot du tube de plongée dans le nez de la coque.<br />
• Installer le nez de la coque sur la coque et l’ajuster par rapport à la partie centrale de la coque.<br />
• Marquer les trous sur le périmètre, les percer et fixer le nez de la coque avec les vis autotaraudeuses<br />
6.14 au capot du tube de plongée.<br />
• Ne retirer les bandes de ruban adhésif qu’avant la mise en peinture.<br />
Stade 7: le kiosque et le gouvernail de plongée avant, pièces 7.1 à 7.13<br />
• Installer le sous-marin dans son berceau de telle sorte que le gouvernail de profondeur soit<br />
exactement parallèle au chantier.<br />
• Marquer latéralement les trous destinés au gouvernail de profondeur avant du dispositif mécanique<br />
de plongée en fonction de la forme moulée. Pour ce faire, mesurer à gauche et à droite, à partir du<br />
chantier, la hauteur au gouvernail, il faut qu’elle soit parfaitement identique. Les trous de part et<br />
d’autre doivent se trouver sur les marques moulées afin d’éviter tout gauchissement ou décalage<br />
vers l’avant ou vers l’arrière.<br />
• Percer les trous progressivement jusqu’à "d" 4 mm.<br />
• Découper le kiosque 7.1 et poncer sa partie inférieure à plat. Entailler la fente pour la hampe du radar.<br />
Percer les trous de "d" 3 mm dans le couvercle du kiosque. Percer les trous supérieurs pour les vis de<br />
réglage avec un foret de "d" 4 mm. Le trou inférieur pour l’écrou noyé est à percer à 3,2 mm.<br />
• Coller l’un sur l’autre, chaque fois, les couples du kiosque 7.2-7.4.<br />
• Coller le couple du kiosque 7.2 selon la marque et l’évidement intérieur, uniquement sur le nez de la<br />
coque.<br />
• Mettre le kiosque 7.1 en place pour essai et vérifier la précision de son assise sur la coque.<br />
• Le couple central 7.3 n’est pas à coller. Il recevra ultérieurement le mécanisme de plongée.<br />
• Glisser le couple de kiosque central 7.3 comme entretoise en butée contre le couple de kiosque 7.2.<br />
• Positionner le couple arrière 7.4 et le coller sur le partie centrale de la coque. Retirer le couple central<br />
du kiosque.<br />
• Démonter le nez de la coque.<br />
• Couper le corps des gouvernails de plongée avant 7.5 selon les indications du croquis de détail.<br />
• Engager les rivets 7.6 dans les trous du nez de la coque.<br />
• Couper le levier de gouvernail 7.7 selon le croquis. Mettre la bague de serrage 7.8 en place et y<br />
engager la vis 7.9.<br />
• Couper la tringle avant 7.10, la munir à une extrémité d’un "z" et l’accrocher au levier.<br />
• Couper le tube de raccordement 7.11 et le munir à ses extrémités d’une fente comme indiqué sur<br />
le croquis.<br />
83
• Munir les bagues de serrage 7.12 des goujons 7.13.<br />
• Glisser le levier de gouvernail et les bagues de serrage sur le tube de raccordement.<br />
• Engager les gouvernails à chaque extrémité dans les rivets. En assemblant les gouvernails engager<br />
également le tube de raccordement.<br />
• Amener le gouvernail droit et le gouvernail gauche exactement dans une position identique.<br />
• Faire tourner les bagues de serrage de telle sorte que les goujons se trouvent sur les fentes limées.<br />
Serrer les goujons.<br />
• Ajuster le levier de gouvernail selon la vue latérale et serrer également la vis 7.9.<br />
Stade 8: l’automatisme de plongée, pièces 8.1 à 8.27<br />
• Percer les trous marqués dans les couples verticaux du kiosque 8.1 et 8.2 avec un foret de "d" 3,2<br />
mm, mettre les écrous à riveter 8.3 en place et les fixer avec de la colle cyanoacrylate.<br />
• Engager la vis de montage "HS" dans les deux écrous à riveter et déterminer un interstice de 26 mm<br />
entre les deux couples.<br />
• Installer l’unité de l’intérieur dans le kiosque et l’ajuster au centre sous la fente. Fixer les couples<br />
avec de la colle cyanoacrylate dans le kiosque.<br />
• Retirer la vis de montage : La vis est accessible par l’un des trous de réglage.<br />
• Engager les deux vis 8.4.<br />
• Engager les écrous 8.5 sur la pointe des vis 8.4 et les fixer chaque fois avec une goutte de colle<br />
cyanoacrylate.<br />
• Remonter le nez de la coque. Mettre le kiosque en place, ajuster à nouveau et le coller uniquement<br />
au couple avant du kiosque 7.2 et au nez de la coque avec de la colle Stabilit-Express.<br />
• Coller les renforts 8.6 à fleur du bord extérieur sur le couple central du kiosque 7.3.<br />
• Percer les plaquettes-paliers 8.7 au niveau des marques avec un foret de "d" 2 mm. Engager la vis<br />
de montage "HS" dans les trous.<br />
• Coller les plaquettes-paliers dans l’encoche entre le couple de kiosque 7.3 et les renforts 8.6.<br />
• Retirer la vis de montage et porter les trous à "d" 4mm.<br />
• Munir la bague de serrage 8.8 du goujon 8.9 et les installer sur la hampe du radar 8.10. Positionner<br />
la bague de serrage exactement selon les cotes indiquées et serrer le goujon.<br />
• Glisser les oeillets de soudage 8.11 par dessous contre la bague de serrage, en faire tourner l’extrémité<br />
de 90ø et couder.<br />
• Souder les oeillets l’un à l’autre et également à la bague de serrage.<br />
• Percer un trou de "d" 1,5 mm dans l’extrémité coudée de l’oeillet de soudage.<br />
84
• Glisser le manchon 8.12 par dessous sur la hampe du radar.<br />
• Souder le crochet en "S" 8.13 au pied de la hampe du radar, il est destiné à recevoir le ressort.<br />
• Installer la hampe du radar entre les plaquettes-paliers et la fixer avec les vis 8.14 et les rivets 8.15.<br />
Serrer les vis de telle sorte que la hampe soit parfaitement maintenue tout en conservant sa<br />
mobilité.<br />
• Couper la tringle 8.16, la munir à une de ses extrémités d’un "z" et l’accrocher dans le trou des<br />
oeillets de soudage.<br />
• Retirer le nez de la coque et le kiosque du modèle.<br />
• Engager la hampe du radar par dessous dans le kiosque. Glisser le couple central du kiosque avec la<br />
mécanique complète en butée contre le couple avant du kiosque.<br />
Le couple doit se trouver à fleur du bord inférieur du kiosque.<br />
• Marquer la position des quatre vis autotaraudeuses 8.17. Percer le kiosque et le couple du kiosque<br />
avec un foret de "d" 1,5 mm. Fixer la mécanique avec les vis autotaraudeuses 8.17 dans le kiosque.<br />
• Accrocher la cheville à oeillet 8.19 dans le crochet en "S" 8.20 et le ressort 8.21 dans les crochets en<br />
"S" 8.13 et 8.20.<br />
• Engager la cheville à oeillet dans le trou du kiosque, engager l’écrou à riveter 8.18 par l’extérieur et<br />
l’enfoncer dans le trou.<br />
• Pratiquer le réglage initial de la cheville à oeillet selon les indications du plan.<br />
• Raccorder les tringles 7.10 et 8.16 avec la bague de serrage 8.22 et le goujon 8.23. Les gouvernails<br />
de plongée avant doivent présenter un angle de plongée d’environ 2ø.<br />
• Coller le pavillon du radar 8.24 sur la bague de serrage 8.25 après l’avoir détaché.<br />
• Glisser le pavillon du radar sur la hampe et fixer la bague de serrage avec le goujon 8.26.<br />
• Selon les indications du plan, percer un trou de "d" 1,5 mm dans le pavillon du radar.<br />
• Couder l’étrier 8.27 selon les indications du croquis correspondant, le couper et le coller dans le<br />
pavillon du radar.<br />
85
Stade 9: finition, équilibrage, pièces 9.1 à 9.6<br />
• Profiler les stabilisateurs du kiosque 9.1 selon les indications de la coupe, les ajuster à l’intérieur à<br />
la forme du kiosque et veiller à ce qu’ils s’installent de manière parfaitement horizontale, identique<br />
à droite et à gauche.<br />
• Ouvrir le sous-marin.<br />
• Percer un trou de "d" 1 mm pour l’antenne rigide 9.2 dans le capot arrière de tube de plongée 1.8<br />
selon les indications du plan. Percer deux trous dans la platine-tiroir pour le passage et l’installation<br />
de l’antenne souple du récepteur.<br />
• Raccourcir l’antenne souple de 500 mm.<br />
• Glisser l’antenne rigide 9.2 par le trou du capot du tube de plongée.<br />
• Assurer le raccordement de l’antenne souple et de l’antenne rigide par soudure ou en les munissant<br />
de fiches.<br />
• Coller l’antenne rigide dans le trou du capot du tube de plongée avec de la colle cyanoacrylate et<br />
bien boucher à l’intérieur avec de la colle Stabilit-Express.<br />
• Poncer la plaque de couverture 9.3 selon le croquis, l’ajuster et la coller sur le dos de la coque.<br />
• Percer le trou pour la valve 9.4 avec un foret de "d" 5,3 mm. Enfoncer la valve et la coller de l’extérieur<br />
avec de la colle cyanoacrylate.<br />
• Il reste à poncer le modèle avec du papier de verre fin puis à le peindre.<br />
• Selon les indications du plan, coller une plaque de plomb 9.5 avec de la colle Stablit-Express<br />
exactement au milieu dans le nez de la coque. Coller ensuite six plaques l’une sur l’autre, sur<br />
la première.<br />
• Coller une plaque 9.6 dans la partie arrière inférieure de la coque selon les indications du plan, puis<br />
cinq autres plaques les unes sur les autres.<br />
• Assembler complètement le modèle.<br />
• Effectuer un essai d’étanchéité en soufflant dans la valve 9.4. L’air ne doit pas pouvoir s’évacuer<br />
vers l’extérieur.<br />
• Pour pratiquer des réglages plus précis, installer le sous-marin dans une bagnoire remplie d’eau. Le<br />
modèle est équilibré lorsqu’il maintient une assiette horizontale, en immersion jusqu’au dos de la<br />
coque.<br />
• Pour obtenir cet équilibre il sera vraisemblablement nécessaire d’installer à l’avant encore environ<br />
deux plaques de plomb et environ une et demie à l’arrière. Installer d’abord les plaques sur le sousmarin<br />
à l’extérieur. Lorsque la quantité de ballast supplémentaire est déterminée, taille des plaques<br />
et nombre, les coller de manière à ce que le modèle reste horizontal dans l’eau sans pencher vers la<br />
gauche ou vers la droite.<br />
• Avant la première sortie, lubrifier l’arbre d’hélice dans le tube d’étambot. Pour ce faire, installer la<br />
pompe à graisse sur le raccord de lubrification et remplir complètement le tube d’étambot de graisse.<br />
86
12. Le réglage du dispositif de plongée<br />
<br />
automatique<br />
Pratiquer le réglage initial du dispositif automatique de plongée et des tringles exactement selon les<br />
indications du plan, pour la première sortie tout au moins.<br />
Si, après une certaine phase de familiarisation avec le modèle vous souhaitez modifier ses<br />
caractéristiques de plongée, procédez comme suit:<br />
• si vous desserrez légèrement la vis avant 8.4 vous accentuez l’incidence du gouvernail de plongée<br />
avant et provoquez une plongée plus rapide. Si vous resserrez cette vis, vous réduisez l’incidence<br />
du gouvernail de plongée avant et donc la vitesse de plongée.<br />
• La tension du ressort 8.21 est modifiée par l’extraction et la torsion des écrous à riveter.<br />
• Le fait de desserrer la vis arrière 8.4 reccourcit la période de plongée et le fait de la serrer prolonge<br />
la période de plongée. A ce niveau également il est nécessaire de régler le ressort 8.21.<br />
Quelques conseils pour la première sortie<br />
Fixer un petit ruban de couleur en plastique (une c<strong>hu</strong>te de la feuille d’autocollants) à l’antenne rigide<br />
afin de pouvoir mieux distinguer le sous-marin pour les premières plongées.<br />
Pour la première sortie, efforcez-vous de chercher un plan d’eau calme dont l’eau est claire et le fond<br />
exempt de plantes filamenteuses etc.<br />
Placez le sous-marin dans l’eau et donnez légèrement et lentement des gaz. Au début, évitez d’immerger<br />
l’extrémité de l’antenne et évitez de naviguer à plein régime. Si vous avez équipé votre modèle d’un<br />
gouvernail de plongée piloté, ne l’utilisez pas au cours des premières sorties pour éviter des mouvements<br />
de plongée trop abrupts.<br />
87
13. Pièces<br />
Stade 1: préparation du moteur<br />
Numéro Désignation Matériaux Cotes en mm Nombre Remarque<br />
de pièce de pièces<br />
1.1 Moteur électrique avec pignon --- Terminé 1 non contenu<br />
1.2 Condensateur d’antiparasitage --- 100 nF 2 non contenu<br />
1.3 Condensateur d’antiparasitage --- 47 nF 1 non contenu<br />
1.4 Gaine isolante Plastique Terminé 4 non contenu<br />
1.5 Fils de connexion du moteur Plast./Cuivre Terminé 1 non contenu<br />
1.6 Fils d’alimentation avec douille Plast./Cuivre Terminé 1 non contenu<br />
1.7 Douille plate AMP-Faston --- Terminé 2 non contenu<br />
1.8 Capot arrière de tube de plongée ABS Injecté 1<br />
1.9 Tube d’étambot avec carter Laiton/Plast. Terminé 1<br />
d’engrenage<br />
1.10 Support de raccord de Laiton terminé 1<br />
lubrification<br />
1.11 Raccord de lubrification Acier Terminé 1<br />
1.12 Arbre d’hélice avec couronne Acier/Plast. Terminé 1<br />
1.13 Couvercle de carter Plastique Injecté 1<br />
1.14 Vis six pans creux Acier M 3 x 10 2<br />
88
Stade 2: le tiroir du moteur et de l’ensemble de radiocommande<br />
Numéro Désignation Matériaux Cotes en mm Nombre<br />
de pièce de pièces<br />
2.1 Ecrou Acier M 3 1<br />
2.2 Tige filetée Acier M 3 x 80 1<br />
2.3 Platine-tiroir ABS 3 estampé 1<br />
2.4 Couple arrière ABS 3 estampé 1<br />
2.5 Couple avant ABS 3 estampé 1<br />
2.6 Rail profilé ABS Profil-T, à couper 2<br />
2.7 Equerre-support avant ABS 3 estampé 2<br />
2.8 Equerre-support arrière ABS 3 estampé 2<br />
2.9 Plaquettes-entretroises ABS 2 estampé 2<br />
2.10 Support ABS 2 estampé 1<br />
2.11 Plaquette-support pour le moteur ABS 3 estampé 2<br />
2.12 Rondelle Laiton "d" intér. 2,6 2<br />
2.13 Vis autotaraudeuse Acier "d"2,2 x 4,5 2<br />
2.14 Couple-interrupteur ABS 3 estampé 1<br />
2.15 Tube-guide de la tringle Plastique "d"2,2 x "d"3,2 1<br />
du gouvernail de plongée à couper<br />
2.16 Tube-guide de la tringle Plastique "d"2,2 x "d"3,2 1<br />
du gouvernail de plongée Plastique à couper 1<br />
Stade 3: montage du tube de plongée<br />
Numéro Désignation Matériaux Cotes en mm Nombre<br />
de pièce de pièces<br />
3.1 Rail profilé ABS Profil-T, 320 de long 1<br />
3.2 Tube de plongée ABS 345 de long 1<br />
3.3 Capot de plongée avant ABS Injecté 1<br />
3.4 Ecrou autobloquant Acier M 3 1<br />
89
Stade 4: mise en place de l’ensemble de réception<br />
Numéro Désignation Matériaux Cotes en mm Nombre Remarque<br />
de pièce de pièces<br />
4.1 Support d’alimentation ABS 2 estampé 4<br />
4.2 Accu d’alimentation du moteur --- Terminé 1 non contenu<br />
4.3 Tringle de renvoi de l’interrupteur Laiton "d" 1,5 1<br />
à couper<br />
4.4 Interrupteur --- Terminé 1 non contenu<br />
4.5 Bague de serrage Laiton "d"2,2 x 1<br />
"d"7 x 5<br />
4.6 Goujon Acier M 3 x 3 1<br />
4.7 Soufflet pour la tringle 4.3 Caoutchouc Terminé 1<br />
4.8 Support pour tube-guide ABS 3 estampé 2<br />
4.9 Goujon Acier M 3 x 6 1<br />
4.10 Bague de serrage Laiton "d"4,2 x 1<br />
"d"7 x 5<br />
4.11 Tringle du gouvernail de Laiton "d"1,5 x 420 1<br />
profondeur<br />
4.12 Tringle du gouvernail de direction Laiton "d"1,5 x 495 1<br />
4.13 Servo du gouvernail de --- Terminé 1 non contenu<br />
profondeur<br />
4.14 Servo du gouvernail de direction --- Terminé 1 non contenu<br />
4.15 Adhésif double face Plastique 1,6 x 19 x 50 8<br />
4.16 Récepteur --- Terminé 1 non contenu<br />
4.17 Régulateur de vitesse --- Terminé 1 non contenu<br />
4.18 Soufflets Caoutchouc Terminé 2<br />
pour les tringles 4.11/4.12<br />
4.19 Joint torique Caoutchouc "d" 85 1<br />
90
Stade 5: l’unité de gouvernail<br />
Numéro Désignation Matériaux Cotes en mm Nombre<br />
de pièce de pièces<br />
5.1 Stabilisateurs Plastique Injecté 4<br />
5.2 Partie centrale Plastique Injecté 1<br />
5.3 Partie inférieure arrière ABS 1,5 estampé 1<br />
de la coque<br />
5.4 Vis autotaraudeuse Acier "d"2,2 x 6,5 3<br />
5.5 Contre-écrou Laiton M 4 1<br />
5.6 Hélice Plastique "d"50, 1<br />
tripale<br />
5.7 Gouvernail de profondeur Plastique Injecté 1<br />
5.8 Gouvernail de direction Plastique Injecté 1<br />
5.9 Rivet Laiton Terminé 4<br />
5.10 Vis autotaraudeuse Acier "d"2,2 x 11 4<br />
5.11 Guignol Plastique Injecté 2<br />
5.12 Tringle de gouvernail de plongée Laiton 1,5 x 220 1<br />
5.13 Tringle du gouvernail de direction Laiton 1,5 x 220 1<br />
5.14 Tube-guide Plastique "d"2,2 x 3<br />
"d"3,2 x 100<br />
5.15 Bague de serrage Laiton "d"3,2 x 2<br />
"d"7 x 5<br />
5.16 Goujon Acier M 3 x 3 2<br />
5.17 Tringle d’interrupteur Laiton "d"1,5 x 1<br />
à couper<br />
5.18 Bague de serrage Laiton "d"3,2 x 1<br />
"d"7 x 5<br />
5.19 Goujon Acier M 3 x 3 1<br />
91
Stade 6: finition de la coque<br />
Numéro Désignation Matériaux Cotes en mm Nombre<br />
de pièce de pièces<br />
6.1 Partie supérieure arrière de ABS 1,5 moulé 1<br />
la coque<br />
6.2 Plaquettes de verrouillage ABS 1,5 moulé 4<br />
6.3 Plaquettes de verrouillage ABS 1,5 moulé 4<br />
6.4 Renfort ABS 1,5 moulé 4<br />
6.5 Vis autotaraudeuse Acier "d"2,2 x 6,5 1<br />
6.6 Vis autotaraudeuse Acier "d"2,2 x 6,5 4<br />
6.7 Vis autotaraudeuse Acier "d"2,2 x 6,5 2<br />
6.8 Partie centrale supérieure de ABS 1,5 moulé 1<br />
la coque<br />
6.9 Partie centrale inférieure de ABS 1,5 moulé 1<br />
la coque<br />
6.10 Partie avant supérieure de ABS 1,5 moulé 1<br />
la coque<br />
6.11 Partie avant inférieure de ABS 1,5 moulé 1<br />
la coque<br />
6.12 Plaquettes de verrouillage ABS 1,5 moulé 6<br />
6.13 Bandes de ruban adhésif Plastique Décor 2<br />
6.14 Vis autotaraudeuse Acier "d"2,2 x 6,5 4<br />
92
Stade 7: le kiosque et le gouvernail de plongée avant<br />
Numéro Désignation Matériaux Cotes en mm Nombre Remarque<br />
de pièce de pièces<br />
7.1 Kiosque ABS 1,5 moulé 1<br />
7.2 Couples du kiosque ABS 2 estampé 2 de chaque<br />
7.3 Couples du kiosque ABS 2 estampé 2 de chaque<br />
7.4 Couples du kiosque ABS 2 estampé 2 de chaque<br />
7.5 Gouvernail de profondeur avant Plast./Laiton Injecté 2<br />
7.6 Rivet Laiton "d"4x0,4x4 2<br />
7.7 Levier de commande Plastique Injecté 1<br />
7.8 Bague de serrage Laiton "d"4 x 1<br />
"d"7 x 5<br />
7.9 Vis Acier M 3 x 6 1<br />
7.10 Tringle avant Laiton "d"1,5 1<br />
à couper<br />
7.11 Tube de raccordement Laiton "d"3,2 x 1<br />
"d"4 ajuster<br />
7.12 Bague de serrage Laiton "d"4 x 2<br />
"d"7 x 5<br />
7.13 Goujon Acier M 3 x 6 2<br />
93
Stade 8: l’automatisme de plongée<br />
Numéro Désignation Matériaux Cotes en mm Nombre<br />
de pièce de pièces<br />
8.1 Couple de kiosque ABS 3 estampé 1<br />
8.2 Couple de kiosque ABS 3 estampé 1<br />
8.3 Ecrou à riveter Laiton M 2 2<br />
"HS" Vis de montage Laiton M 2 x 35 1<br />
8.4 Vis Laiton M 2 x 20 2<br />
8.5 Ecrou Laiton M 2 2<br />
8.6 Renfort ABS 3 estampé 2<br />
8.7 Plaquettes-paliers ABS 3 estampé 2<br />
8.8 Bague de serrage Laiton "d"4 x<br />
"d"7 x 5<br />
1<br />
8.9 Goujon Acier M 3 x 3 1<br />
8.10 Hampe du radar Tube laiton "d" 4<br />
à couper<br />
1<br />
8.11 Oeillet de soudage Laiton Terminé 2<br />
8.12 Manchon Alu Tourné 1<br />
8.13 Crochet en "S" Laiton Terminé 1<br />
8.14 Vis Laiton M 3 x 10 2<br />
8.15 Rivet creux Laiton "d"4 x0,4 x 4 2<br />
8.16 Tringle Laiton "d"1,5<br />
à couper<br />
1<br />
8.17 Vis autotaraudeuse Acier "d"2,2 x 6,5 4<br />
8.18 Ecrou à riveter Laiton M 2 1<br />
8.19 Cheville à oeillet Laiton M 2 terminé 1<br />
8.20 Crochet en "S" Laiton Terminé 1<br />
8.21 Ressort Acier Terminé 1<br />
8.22 Bague de serrage Laiton "d"3 x<br />
"d"7 x 5<br />
1<br />
8.23 Goujon Acier M 3 x 3 1<br />
8.24 Pavillon du radar ABS 1,5 moulé 1<br />
8.25 Bague de serrage Laiton "d"4 x<br />
"d"7 x 5<br />
1<br />
8.26 Goujon Acier M 3 x 3 1<br />
8.27 Etrier Laiton 1,5 selon plan 1<br />
94
Stade 9: finition, équilibrage<br />
Numéro Désignation Matériaux Cotes en mm Nombre Remarque<br />
de pièce de pièces<br />
9.1 Stabilisateurs de kiosque ABS 2 estampé 2<br />
9.2 Antenne rigide Corde à piano "d"0,8 x 500 1<br />
9.3 Couvercle ABS 3 estampé 1<br />
9.4 Soupape complète Acier Terminé 1<br />
9.5 Plaques de lestage avant Plomb 440 g environ 1 non contenu<br />
9.6 Plaques de lestage arrière Plomb 350 g environ 1 non contenu<br />
95
"0"<br />
96<br />
0.1<br />
0.1<br />
0.2<br />
300<br />
340 x 195 x 10
Inhoudsopgave<br />
<br />
98<br />
Pagina<br />
1. Inleiding ............................................................................................................................... 99<br />
2. Uitleg van de symbolen ...................................................................................................... 100<br />
3. De wijze waarop de SHARCON functioneert ........................................................................ 100<br />
4. Technische Gegevens ......................................................................................................... 101<br />
5. Veiligheidsmaatregelen ...................................................................................................... 101<br />
6. Toebehoren ....................................................................................................................... 102<br />
7. Algemeen geldende tips voor de bouwvolgorde ................................................................. 103<br />
8. Tips voor het schilderen ..................................................................................................... 193<br />
9. Het aanbrengen van de decorstickers ................................................................................ 104<br />
10. Tips voor de radiobestuuring .............................................................................................. 104<br />
11. Bouwbeschrijving ............................................................................................................... 105<br />
Bouwfase 0: de standaard, delen 0.1-0.2 ............................................................................ 105<br />
Bouwfase 1: voorbereiden van de aandrijving, delen 1.1-1.14 .............................................. 105<br />
Bouwfase 2: insc<strong>hu</strong>ifeenheid voor de aandrijving, delen 2.1-2.16 ....................................... 106<br />
Bouwfase 3: montage van de drukkamerbuis, delen 3.1-3.4 ............................................... 107<br />
Bouwfase 4: de inbouw van de radiobesturing, delen 4.1-4.19 ............................................ 109<br />
Bouwfase 5: de roereenheid, delen 5.1-5.19 ........................................................................ 110<br />
Functiecontrole ................................................................................................................... 112<br />
Bouwfase 6: gereedmaken van de romp, delen 6.1-6.14 ...................................................... 113<br />
Bouwfase 7: de toren en voorste duikroeren, delen 7.1-7.13. ............................................... 115<br />
Bouwfase 8: de duikautomatiek, delen 8.1-8.27 .................................................................. 116<br />
Bouwfase 9: afsluitende werkzaamheden en uitbalanceren, delen 9.1-9.612 ....................... 118<br />
12. Het instellen van de duikautomatiek ................................................................................... 119<br />
13. Stuklist .............................................................................................................................. 120
1. Inleiding<br />
Geachte klant,<br />
hartelijk dank voor de aankoop van dit product.<br />
Gelieve deze gebruiksaanwijzing goed op te volgen teneinde deze toestand te behouden<br />
en een gebruik zonder gevaren te waarborgen!<br />
U dient vóór de ingebruikname van het product de gebruiksaanwijzing volledig te lezen<br />
en alle bedienings- en veiligheidsvoorschriften in acht te nemen!<br />
Alle firmanamen en productnamen zijn handelsmerken van de respectieve eigenaars. Alle rechten<br />
voorbehouden.<br />
Bij vragen kunt u zich wenden tot onze technische helpdesk:<br />
<br />
Voor meer informatie kunt u kijken op www.conrad.nl of www.conrad.be.<br />
99
2. Uitleg van de symbolen<br />
100<br />
Het symbool met het uitroepteken in een driehoek wijst op belangrijke aanwijzingen in<br />
deze gebruiksaanwijzing die in ieder geval nageleefd moeten worden.<br />
Het symbool wijst op speciale tips en aanwijzingen voor de bediening van het product.<br />
<br />
3. De wijze waarop de SHARCON<br />
<br />
functioneert<br />
In rust ligt het model, met een geringe restdrijfkracht, tot de bovenkant van van de romprug in het<br />
water; daarbij ligt het stabiel.<br />
Ook bij langzaam varen blijft het model in deze positie aan de oppervlakte drijven.<br />
Als het motortoerental en daarmee de snelheid wordt vergroot, duikt de boot automatisch. De<br />
langssleuven in de romp zorgen ervoor dat het water zowel naar binnen als naar buiten kan stromen,<br />
zodat een pomp overbodig is.<br />
Bij een bepaalde duikdiepte en snelheid zorgt de waterdruk tegen het draaibaar gelagerde radarscherm,<br />
dat deel uitmaakt van de duikautomatiek, voor een achterwaartse beweging. Deze beweging wordt<br />
langs mechanische weg op de voorste duikroeren overgebracht. Deze worden dan op een positieve<br />
hoek ingesteld, waardoor de boot opduikt.<br />
Zodra het radarscherm zich niet meer onder water bevindt, keren de voorste duikroeren weer in <strong>hu</strong>n<br />
uitgangspositie terug.<br />
Er kan dan opnieuw worden gedoken, waarbij de duiktijd door middel van de snelheid is te be‹nvloeden.<br />
De boot kan naar keuze door middel van 2 of 3 kanalen worden bestuurd. Bij een besturing via 2 kanalen<br />
is de duikvaart afhankelijk van de snelheid en de duikautomatiek.<br />
Bij meer ervaring met de besturing van onderzeeboten biedt een extra functie voor het (achterste)<br />
duikroer de volgende mogelijkheden:<br />
De duikautomatiek kan bij het onderwatervaren worden „overstuurd“; dat wil zeggen, dat in dat geval<br />
de duikdiepte direct regelbaar is.Bij overeenkomstig trekken van de duikroerknuppel (naar u toe halen<br />
van de knuppel) kunnen we snel aan de oppervlakte varen, zonder dat de boot duikt.
4. Technische gegevens<br />
Lengte o.a.: ca. 900 mm<br />
Breedte o.a: ca. 200 mm<br />
Breedte drukkamerbuis: ca. 100 mm<br />
Hoogte o.a: ca. 320 mm<br />
Gewicht: ca. 4100 g<br />
<br />
5. Veiligheidsmaatregelen<br />
1. Bij de bouw van het model op het volgende letten: Binnen in de drukkamer uitsluitend<br />
de voorgeschreven lijmsoorten gebruiken. Voordat de drukkamer wordt gesloten, alle<br />
lijmverbindingen degelijk laten uitdampen.<br />
2. De loodaccus mogen niet in een gesloten drukkamer worden geladen -<br />
ontploffingsgevaar!<br />
Voor het laden, de drukkamer openen en de accus eruit nemen. Beslist de<br />
laadvoorschriften inachtnemen.<br />
Tijdens het laden van de accus, kan het waterstofgas via de veiligheidsvenielen (van<br />
de accu) ontwijken. Daarom voor het inbouwen van de accus beslist minstens een uur<br />
wachten.<br />
3. Nadat de drukkamer kort voor het in bedrijf nemen wordt afgesloten, wordt door in het<br />
ventiel blazen, de waterdichtheid gecontrolererd. Daartoe een stuk siliconenslang op<br />
het ventiel sc<strong>hu</strong>iven en daar met de mond krachtig in blazen. De drukkamer mag niet te<br />
sterk onder druk worden geziet. In geen geval een luchtpomp of perslucht gebruiken.<br />
4. Als er niet meer wordt gevaren resp. het model wordt opgeborgen, de drukkamer<br />
openen.<br />
101
6. Toebehoren<br />
Niet aanwezige, maar noodzakelijke toebehoren:<br />
Nr. Benaming Aantal<br />
4.2 Vaaraccu 1<br />
4.4 Scheidingsschakelaar 1<br />
4.13 Servo 1<br />
4.14 Servo 1<br />
4.16 Ontvanger 1<br />
4.17 Regelaar vanaf 20A 1<br />
--• Assenvet ---<br />
Aanbevolen radiobesturing<br />
Alle radiobesturingen met 2 of meer kanalen in de 27 MHz of 40 MHz uitvoering, in combinatie met 1<br />
servo en een elektronische snelheidsregelaar van 20 A of zwaarder.<br />
Bij de extra bediening van het duikroer is een vierkanaals-radiobesturing met 2 servo´s noodzakelijk.<br />
Aanbevolen lijmsoorten<br />
Lijmsoort Geschickt vor het lijmen van<br />
Twee-componentenlijm Hout, metaal, kunststof<br />
Eencomponentenlijm Universeel bruikbaar<br />
Aanbevolen lak<br />
Synthetische lak op basis van kunsthars of acryl.<br />
102
7. algemeen geldende tips voor de<br />
<br />
bouwvolgorde<br />
In principe komt de nummering van de delen overeen met de volgorde van bouwen; daarbij geeft het<br />
nummer voor de punt de bouwfase aan, het nummer daarachter het betreffende onderdeel.<br />
Geef uzelf, in combinatie met het bouwplan, de detailtekeningen, deze beschrijving en de stuklijst, een<br />
overzicht van de stap voor stap uit te voeren werkzaamheden (bouwfasen).<br />
Restanten die bij de bewerking van de vacu_mgezogen delen worden weggesneden, zijn in de tekeningen<br />
of op de delen door een arcering aangegeven.<br />
De buitencontouren van de rompschalen zijn niet aangegeven, omdat daar slechts de horizontale vlakken<br />
worden weggesneden.<br />
Als de vacuümgezogen delen zijn uitgesneden, de snijkanten met sc<strong>hu</strong>urpapier gladmaken.<br />
Het vinden van de stansdelen wordt door de in het midden van deze handleiding aangebrachte<br />
identificatietekening „O“ vereenvoudigd.<br />
De stansdelen in overeenstemming nummeren. De stansdelen pas uitnemen als ze<br />
benodigd zijn en aansluitend zuiver gladmaken.Richtingsaanduidingen, bijvoorbeeld<br />
„rechts“ of „achter“ moeten in de vaarichting worden gezien.<br />
<br />
8. Tips voor het schilderen<br />
Alle kunststofdelen worden voor het lakken met verdunner voor synthetische lak (geen aceton of thinner<br />
en dergelijke) gereinigd en daarna zo min mogelijk aangeraakt.<br />
Voordat we met het eigenlijke schilderen beginnen, verdient het aanbeveling om de overgangen met<br />
een goede kunststofplamuur te behandelen.<br />
Daarna kunnen we het model gronden en aflakken.<br />
Als lakken in meerdere kleuren de bedoeling is, moeten we de overgangen met Tesafilm of PVC-tape<br />
afplakken. Geen Tesa- of andere krepband gebruiken!<br />
De tape moet worden verwijderd als de lak is aangedroogd.<br />
Voor het schilderen wordt uitsluitend hoogwaardige synthetische lak op basis van kunsthars of acryl<br />
aanbevolen.Voor het kleurenschema kunt u de afbeeldingen op de doos raadplegen.<br />
103
9. Het aanbrengen van de decorstickers<br />
104<br />
Bij het aanbrengen van de decorstickers kunt u de afbeelding op de doos raadplegen.<br />
• Een niet te kleine plastic-schaal vullen met lauw water (ca. 20ø) en daaraan enkele scheuten<br />
afwasmiddel toevoegen.<br />
• Een spons of sponsdoekje met het afwaswater bevochtigen en daarmee het te beplakken gedeelte<br />
van het model vochtig maken.<br />
• De decorstickers een voor een afnemen, in het afwaswater natmaken, op de te beplakken plaats<br />
leggen, uitrichten en met een doek aandrukken.<br />
• Als het water onder de sticker opgedroogd is, de sticker nogmaals met een droge doek aandrukken.<br />
<br />
10. Tips voor de radiobestuuring<br />
Als radiobesturing is een robbe-set met 2 kanalen voldoende. Als bovendien de duikroeren worden<br />
aangestuurd, is een radiobesturing met 4 kanalen noodzakelijk.<br />
Het ontvangercircuit wordt via de vaaraccu van stroom voorzien. Daarom moet de benodigde<br />
snelheidsregelaar een type voor 20 A continu of meer zijn, met een ge‹ntegreerde voeding voor de<br />
ontvanger.<br />
Wij adviseren u om de aanbevolen RC-componenten in te bouwen. Bij gebruik van andere componenten<br />
kunt u eveneens het inbouwschema aanhouden.<br />
Maatafwijkingen moet u natuurlijk zelf corrigeren.
11. Bouwbeschrijving<br />
Bouwfase 0: de standaard, delen 0.1-0.2<br />
Maak eerst een stabile standaard, zodat het model stevig neergezet kan worden. Daartoe de in schaal<br />
1:1 getekende rompsteunen 0.1 op het betreffende materiaal overbrengen, uitzagen en op de voetplaat<br />
0.2 lijmen.<br />
Het hiervoor benodigde materiaal bevindt zich niet in de bouwdoos.<br />
De draagranden van de complete standaard met vilt of sc<strong>hu</strong>immateriaal bekleden, om beschadigen of<br />
krassen van het model te voorkomen.<br />
Bouwfase 1: voorbereiden van de aandrijving, delen 1.1-1.14<br />
• Bij de bedradingswerkzaamheden het schakelschema raadplegen.<br />
• Bij de elektromotor 1.1 de weekijzeren mantel eraf sc<strong>hu</strong>iven, omdat die niet wordt gebruikt.<br />
• De elektromotor ontstoren. Daartoe van beide condensatoren 1.2 een uitloper van isolatiekous 1.4<br />
voorzien en aan een motoraansluitlip, de andere aan een blank te vijlen plaats van het <strong>hu</strong>is solderen.<br />
• De condensator 1.3 wordt eveneens van isolatiekous voorzien en als een brugje tussen de<br />
motoraansluitlippen gesoldeerd.<br />
• Het motoraansluitsnoer 1.5 aan de lippen van de motor solderen.<br />
• Met be<strong>hu</strong>lp van het snoer met stekerbusjes 1.6 en de AMP-Fastonstekers 1.7 het accusnoer samenstellen.<br />
• In combinatie met de radiobesturing de draairichting van de motor controleren. Daartoe zowel de<br />
regelaar als de radiobesturing aan de hand van de bij die apparaten aanwezige gebruiksaanwijzingen<br />
aansluiten. De vaaraccu aansluiten. Bij het op de accu aansluiten van het snoer op de juiste polariteit<br />
letten.<br />
• De knuppel van de zender in de richting „vooruitvaren“ bewegen. Als we nu op het motortandwiel<br />
kijken, moet de motor rechtsom draaien, dus met de wijzers van de klok mee.<br />
Als de motor in tegengestelde richting draait, moeten we, door omsolderen bij de<br />
motoraansluitlippen, de uitlopers van het motoraansluitsnoer onderling verwisselen.<br />
• Het gaatjes voor de roerstangen en de schakelaarsteng met 3,2 mm in de drukkamerkap 1.8 boren.<br />
• Het middelste gat (trapvormige boring) van de achterste drukkamerkap 1.8 doorlopend tot 6,5 mm<br />
opboren.<br />
105
• De schroefaskoker 1.9 met tandwiel<strong>hu</strong>is door de drukkamerkap sc<strong>hu</strong>iven.<br />
• De smeernippelsteun 1.10 aan de onderkant in overeenstemming met de schroefascontour halfrond<br />
vijlen en volgens plan op de schroefaskoker solderen.<br />
• De schroefaskoker door de steun met 3 mm boren. De boorrestanten zorgvuldig uitblazen.<br />
• De smeernippel 1.11 op de steun lijmen. Daartoe de nippel rondom bij de rand van Stabilit-Express<br />
voorzien en de nippel opzetten.<br />
• De schroefas 1.12 in de schroefaskoker sc<strong>hu</strong>iven. Het tandwiel met teflonvet smeren.<br />
• Het tandwiel<strong>hu</strong>isdeksel 1.13 in het tandwiel<strong>hu</strong>is leggen. De motor aanbrengen en met de boutjes<br />
1.14 vastzetten.<br />
Bouwfase 2: insc<strong>hu</strong>ifeenheid voor de aandrijving, delen 2.1-2.16<br />
• Het moertje 2.1 op de draadstang 2.2 draaien.<br />
• Aan de hand van de centerpuntjes in de insc<strong>hu</strong>ifplaat 2.3 de dwarssleuf voor het moertje 2.1 boren<br />
en rechthoekig uitvijlen. Pas dan de langssleuf voor de draadstang uitwerken. De sleuf aan een kant<br />
met Tesafilm afplakken.<br />
• De insc<strong>hu</strong>ifplaat 2.3 zodanig op een vlak werkblad leggen, dat de sleuven voor het moertje en de<br />
draadstang buiten het werkblad komen.<br />
• Het moertje aan de hand van de dwarssleuf op de draadstang instellen. De draadstang inleggen. Na<br />
insmeren van de sleuf met Stabilit-Express, de eenheid 2.1/2.2 inlijmen.<br />
• De openingen voor de accu en het tandwiel<strong>hu</strong>is uitwerken.<br />
• De spant 2.4 van een doorvoer voor het motoraansluitsnoer 1.5 voorzien.<br />
• De insc<strong>hu</strong>ifplaat 2.3 op een vlakke ondergrond leggen.<br />
• De twee spanten 2.4 en 2.5 aan de hand van de tekening op de plaat 2.3 positioneren, haaks uitrichten<br />
en met secondenlijm (Secondenlijm) fixeren.<br />
• De nog niet op maat gemaakte profielen 2.6 door de spanten sc<strong>hu</strong>iven en met secondenlijm fixeren.<br />
De profielen door langslopende druppels secondenlijm aan de plaat en spanten lijmen.<br />
• De overstekende gedeelten van de profielen voor en achter aan de hand van de contour van de<br />
insc<strong>hu</strong>ifplaat wegsnijden. De profielen bijsc<strong>hu</strong>ren resp. aan de hand van de binnencontour van de<br />
drukkamerkappen afsc<strong>hu</strong>inen.<br />
• De voorste en achterste hoeksteunen 2.7 en 2.8 volgens plan inlijmen. De steunen moeten tegen de<br />
profielen rusten.<br />
• De twee afstandplaatjes 2.9, gelijkliggend met de binnenkant van de achterste sleuf voor de<br />
schroefaskoker, vastlijmen.<br />
• De ondersteuning 2.10 voor de schroefaskoker op de plaatjes 2.9 lijmen.<br />
• De twee plaatjes 2.11 tegen de delen 2.9/2.10 rustend vastlijmen.<br />
106
• De aandrijving vanaf de onderkant in de uitsparing van de insc<strong>hu</strong>ifplaat aanbrengen. Indien nodig,<br />
bij de bevestigingsplaatjes 2.11 bijsc<strong>hu</strong>ren.<br />
• De gaatjes voor de zelftappers 2.13 gemeenschappelijk met 1,5 mm door de steunribben van het<br />
tandwiel<strong>hu</strong>is en de plaatjes 2.11 boren.<br />
• De aandrijving uitnemen en alleen de gaatjes in het tandwiel<strong>hu</strong>is tot 2,5 mm opboren.<br />
• De aandrijving weer aanbrengen en met de sluitringen 2.12 en zelftappers 2.13 vastzetten.<br />
• De achterste drukkamerkap 1.8 tot de insc<strong>hu</strong>ifplaat aansc<strong>hu</strong>iven, maar niet vastlijmen. De<br />
insc<strong>hu</strong>ifplaat moet in de binnenste sleuven van de drukkamerkap komen.<br />
• Aan de hand van de in te bouwen schakelaar in de schakelaarspant 2.14 de uitsparing en boringen<br />
aanbrengen. De schakelaarspant aanpassen en met secondenlijm alleen aan de schroefaskokerondersteuning<br />
2.10 fixeren.<br />
• De buitenmantel 2.15 aan de voorkant van een rechthoekige, ca. 3 mm brede en 5 mm lange sleuf<br />
voorzien - detailaanzicht „Z“.<br />
• De buitenmantels 2.15 en 2.16 op maat maken, bij de lijmplaatsen ruw maken en in de zijdelingse<br />
boringen van de drukkamerkap sc<strong>hu</strong>iven. De drukkamerkap naar achteren trekken en de<br />
buitenmantels met secondenlijm fixeren.<br />
Bouwfase 3: montage van de drukkamerbuis, delen 3.1-3.4<br />
Rode merkering<br />
Drukvat 3.2<br />
De rode merkering kenmerkt de achterkant von het drukvat 3.2.<br />
• Het profiel 3.1 precies 320 mm lang maken.<br />
• Het profiel moet 13 mm vanaf de voorkant in de drukkamerbuis worden gelijmd. Deze 13 mm aan de<br />
voor/binnenkant aftekenen.<br />
• Het profiel 3.1 in de drukkamerbuis 3.2 leggen - de markering bij 13 mm aanhouden. De drukkamerbuis<br />
zodanig op de werktafel fixeren, dat hij niet kan wegrollen. Een stalen liniaal langs het profiel leggen,<br />
zodat we het profiel recht kunnen uitrichten. Het profiel mag niet sc<strong>hu</strong>in in de buis liggen en<br />
moet rechtlijnig verlopen.<br />
• Het profiel aan de voor- en achterkant met een tipje secondenlijm fixeren. Bij een ingelegde stalen<br />
liniaal aan de tegenoverliggende kant een druppel secondenlijm langs het profiel laten lopen.<br />
107
108<br />
Voorzichtig: de liniaal niet meelijmen.<br />
• De insc<strong>hu</strong>ifplaat in de drukkamerbuis sc<strong>hu</strong>iven en controleren of deze licht op het profiel 3.1 sc<strong>hu</strong>ift.<br />
• Drukkamerbuis in combinatie met de achterste drukkamerkap tot de smeernippel sc<strong>hu</strong>iven.<br />
• De voorste drukkamerkap 3.3 op de draadstang 2.2 sc<strong>hu</strong>iven, waarbij de insc<strong>hu</strong>ifplaat in de sleuven<br />
van de kap moet komen.<br />
• De voorste kap met het borgmoertje 3.4 zekeren. Het moertje niet vast aandraaien.<br />
• De drukkamerbuis naar voren, geheel op de kap sc<strong>hu</strong>iven. De achterste drukkamerkap aansc<strong>hu</strong>iven.<br />
De beide drukkamerkappen moeten zonder speling in de drukkamerbuis zitten.<br />
• Op de drukkamerbuis en de voorste drukkamerkap een gemeenschappelijke merklijn trekken. Op<br />
die manier is de onderlinge positie van deze delen vastgelegd; zodat ze later niet tegenover elkaar<br />
verdraaid aaneen worden gelijmd.<br />
• Het moertje 3.4 losdraaien, de drukkamerbuis met voorste drukkamerkap naar voren afnemen.<br />
• De achterste drukkamerkap weer aansc<strong>hu</strong>iven en daarbij opletten dat de insc<strong>hu</strong>ifplaat in de sleuven<br />
glijdt.<br />
• De insc<strong>hu</strong>ifeenheid de schakelaarspant met Stabilit-Express aan de achterste drukkamerkap lijmen.<br />
Nog voordat de lijm is uitgehard, de drukkamerbuis met voorste drukkamerkap opsc<strong>hu</strong>iven en op<br />
die manier de achterste drukkamerkap uitrichten.<br />
• Tot de lijm is uitgehard, het model verticaal opstellen; bijvoorbeeld met de schroefaskoker in een<br />
lege fles. Op die manier voorkomen we dat de lijm wegloopt.<br />
• Het complete voorste deel weer afnemen.<br />
• De lijmplaatsen aan de binnenkant van de achterste drukkamerkap met Stabilit-Express verlijmen.<br />
Daarbij gelijktijdig de buitenmantels 2.15 en 2.16 aan de drukkamerkap lijmen.<br />
• De schroefaskoker aan de buitenkant van de drukkamerkap met Stabilit-Express vastlijmen.<br />
• De voorste drukkamerkap alsmede de voorste, bovenste rand van de drukkamerbuis rondom met<br />
transparante Tesafilm afplakken.<br />
• De binnenste rand van de voorste drukkamerkap 3.3 en de voorkant van drukkamerbuis aan de<br />
binnenkant degelijk met siliconenkit insmeren. De kap op de drukkamerbuis zetten en spelingvrij<br />
aandrukken. De beide vooraf aangebrachte merktekens moeten daarbij met elkaar overeenstemmen.<br />
• De siliconenkit moet goed uitvulcaniseren, wat bij de uitgepuilende kit te controleren is. Er moet<br />
aan beide kanten voor een goede beluchting worden gezorgd. Als de siliconenkit volledig is<br />
uitgevulcaniseerd, de stroken Tesafilm eraf halen en de uitpuilende kit verwijderen.
Bouwfase 4: de inbouw van de radiobesturing, delen 4.1-4.19<br />
Opmerking:<br />
Bij een star uitgevoerd duikroer komt de duikroerservo 4.13 te vervallen. Bij een beweegbaar<br />
duikroer vervallen het madenschroefje 4.9 en de stelring 4.10.Alle andere delen en<br />
werkzaamheden blijven voor beide versies hetzelfde.<br />
Op die manier is het mogelijk om met het model in het begin met een star uitgevoerd<br />
duikroer te varen, en als we er voldoende aan gewend zijn het duikroer functionerend uit<br />
te voeren.<br />
• De gestansde, 2 mm dikke accusteunen 4.1 aan beide kanten zodanig bijsc<strong>hu</strong>ren, dat ze klemvrij in<br />
de 1,5 mm sleuf van de accu 4.2 aangebracht kunnen worden.<br />
• De vier steunen tot de aanslag naar boven sc<strong>hu</strong>iven en met secondenlijm vastzetten.<br />
• De bedieningsstang 4.3 voor de schakelaar aan een kant volgens de bovenaanzicht voorbuigen en<br />
aan de binnenkant door de binnenste boring van de achterste drukkamerkap sc<strong>hu</strong>iven.<br />
• De schakelaar 4.4 zodanig inbouwen dat deze bij de sc<strong>hu</strong>if naar achteren, ofwel trekken aan de<br />
stang, in de positie „uit“ staat. Als de boot later bij het varen een keer met de schakelstang ergens<br />
achter haakt, is op deze manier zekergesteld dat de radiobesturing ingeschakeld blijft.<br />
• De dwarsboring in de sc<strong>hu</strong>if van de schakelaar nauwkeurig volgens het detailaanzicht „Y“ aftekenen<br />
en met 1,5 mm voorboren. Het gaatje tot 2 mm opboren.<br />
• De stang 4.3 vanaf de onderkant door die boring sc<strong>hu</strong>iven. Daartoe de stang overeenkomstig<br />
bijbuigen.<br />
• De stang met de stelring 4.5 en het ingedraaide madenschroefje 4.6 borgen. De stang volgens plan<br />
op lengte maken. Het bijgeknipte einde degelijk ontbramen.<br />
• De manchet 4.7 aan de binnenkant goed met water natmaken. Aan dat water moet een scheut<br />
afwasmiddel toegevoegd zijn.<br />
• De manchet op de stang 4.3 naar voren sc<strong>hu</strong>iven, tot op de nippel van de drukkamerkap 1.8. De<br />
manchet op een totale lengte van ongeveer 50 mm instellen.<br />
• De accu 4.2 bij wijze van proef in de uitsparing van de insc<strong>hu</strong>ifplaat aanbrengen.<br />
• De steunen 4.8 voor de buitenmantels 2.15 en 2.16 met 3,2mm boren, vanaf de voorkant opsc<strong>hu</strong>iven<br />
en aan de hand van het bovenaanzicht uitrichten. De buitenrand van de steunen mag niet over de<br />
rand van de insc<strong>hu</strong>ifplaat steken. De steunen vastlijmen.<br />
• Los op de buitenmantel 2.15 van de duikroer-aanstuurstang een stelring 4.10 met madenschroefje<br />
4.9 sc<strong>hu</strong>iven.<br />
• De duikroer-aanstuurstang 4.11 tot 420 mm, de richtingsroeraanstuurstang 4.12 tot 495 mm inkorten.<br />
De bijgeknipte einden zuiver ontbramen.<br />
• De stangen 4.11 en 4.12 elk aan een kant z-vormig buigen en aan de stuurschijven van de betreffende<br />
servo’s 4.13/4.14 bevestigen.<br />
109
• De duikroer-aanstuurstang 4.11 in de buitenmantel 2.15 sc<strong>hu</strong>iven. De servo 4.13 volgens het<br />
bovenaanzicht positioneren en met twee stroken dubbelzijdig kleefband 4.15 zodanig op de plaat<br />
2.3 bevestigen, dat de stang recht en klemvrij naar achteren loopt.<br />
• Bij een niet aangestuurd duikroer de stang 4.11 aan de hand van het bovenaanzicht instellen en het<br />
madenschroefje 4.9 van de stelring 4.10 vastzetten - detailaanzicht „Z“.<br />
• Op dezelfde wijze de richtingsroer-aanstuurstang 4.12 met servo 4.14 inbouwen en met twee stroken<br />
dubbelzijdig kleefband 4.15 vastzetten.<br />
• De ontvanger 4.16 en snelheidsregelaar 4.17 met dubbelzijdig kleefband 4.15 bevestigen.<br />
• De radiobesturing en accu aan de hand van het schema en de gebruiksaanwijzingen, die bij deze<br />
componenten aanwezig zijn, aansluiten. De aansluitsnoeren van de motor, regelaar en schakelaar<br />
kunnen eveneens met dubbelzijdig kleefband op de regelaar worden vastgezet.<br />
• De laadaansluiting moet vrij toegankelijk blijven. De snoeren met isolatieband of spiraalslang<br />
samenbundelen en netjes rangschikken.<br />
• De servo’s door middel van de radiobesturing op neutraal regelen.<br />
• De manchetten 4.18, zoals reeds is beschreven, met water op de stangen 4.13 en 4.14 sc<strong>hu</strong>iven en<br />
op een lengte van ca. 50 mm instellen. Daarbij opletten, dat de servo’s op neutraal blijven staan.<br />
De manchetten 4.7 en 4.18 met secondenlijm waterdicht aan zowel de stangen als de nippels van de<br />
drukkamerkap lijmen.<br />
• De accu 4.2 uitnemen. De O-ring 4.19 op de achterste drukkamerkap sc<strong>hu</strong>iven.<br />
• De drukkamerbuis 3.2 met voorste kap 3.3 aanbrengen. Het borgmoertje 3.4 opdraaien en iets<br />
aandraaien. Op die manier wordt de O-ring licht samengedrukt.<br />
Bouwfase 5: de roereenheid, delen 5.1-5.19<br />
• De vier stabilisatievlakken vanaf de achterkant in de sleuven van het middendeel 5.2 sc<strong>hu</strong>iven.<br />
• Aan de voorkant van de sleuf elk stabilisatievlak met een tipje secondenlijm vastzetten.<br />
• Bij het middendeel met een boor de voorkant van de boring ontbramen.<br />
• De eenheid 5.1/5.2 zodanig op de schroefaskoker sc<strong>hu</strong>iven, dat aan de lagerbus aan de achterkant<br />
zichtbaar is.<br />
• Voor het uitrichten van de stabilisatie-eenheid, het model in de standaard plaatsen.<br />
• De drukkamerbuis 3.2 zodanig uitrichten, dat bij de rechter en linker nippel van de drukkamerkap de<br />
afstand ten opzichte van de werktafel hetzelfde is - X rechts = X links - detailaanzicht „Z“<br />
• De stabilisatie-eenheid nu zodanig op de schroefaskoker verdraaien, dat ook bij de horizontale<br />
dempingsvlakken de afstand rechts en links tot het werkvlak hetzelfde is - Y rechts = Y links.<br />
• Voor controle, de verticale positie van de verticale dempingsvlakken meten.<br />
110
• Het middendeel 5.2 aan de voorkant met Stabilit-Expreá aan de schroefaskoker lijmen. Er mag geen<br />
lijm in de schroefaskoker lopen.<br />
Tips voor de nu volgende bewerking van de rompdelen:<br />
Bij het boren van de gaatjes voor de zelftappers, eerst de gaatjes van 1,5 mm<br />
gemeenschappelijk in beide delen boren. Aansluitend wordt het gaatje van het aan de<br />
buitenkant aanwezige deel, als doorvoergaatje, tot 2,5 mm vergroot.<br />
Deze procedure wordt niet meer apart beschreven.De sleufgaten voor de doorstroming<br />
van de romp worden stap voor stap, met 1,5 mm aanvangend, tot 3 mm opgeboord.<br />
• De onderste sleufgaten voor de waterafvloeiing aan de hand van de markeringen in het onderste<br />
romp-achterdeel 5.3 boren en uitvijlen.<br />
• Aan de achterkant de drie stangdoorvoersleuven boren en naar het verloop van de stangen uitvijlen.<br />
• Deel 5.3 aan de hand van de markeringen bijsnijden en zodanig aan de stabilisatie-eenheid<br />
aanpassen, dat het aan de achterkant afsluit. Neem nota van de sleuven en opening naar achteren.<br />
De zijdelingse sleufgaten contourgetrouw bijvijlen.<br />
• De voorkant van deel 5.3 zodanig bijsc<strong>hu</strong>ren, dat deze precies gelijk komt met de binnenrand van<br />
de achterste drukkamerkap.<br />
• Het romp-achterdeel met secondenlijm aan de binnenkant van de stabilisatie-eenheid fixeren. Met<br />
Stabilit-Express nalijmen.<br />
• Het model in zijn standaard draaien en daarbij het rompachterdeel horizontaal uitrichten.<br />
• Precies in het midden een gaatje van 1,5 mm door deel 5.3 en de rand van de drukkamerkap 1.8<br />
boren. De kap zelf mogen we niet inboren. Dit geldt ook bij het boren van de volgende gaatjes. De<br />
maat 10 mm beslist aanhouden.<br />
• Deel 5.3 met een zelftapper 5.4 aan de drukkamerkap bevestigen.<br />
• De twee zijdelingse gaatjes boren en het romp-achterdeel met de twee resterende zelftappers 5.4<br />
bevestigen.<br />
• De contramoer 5.5 op de schroefas draaien; daarbij een ruimte van 0,5 mm tussen het lager van de<br />
schroefaskoker aanhouden.<br />
• De naaf van de schroef 5.6 volgens de bovenaanzicht inkorten. De zaagsnede zuiver bijwerken. De<br />
schroef op de as draaien en met de moer 5.5 borgen.<br />
• Het achterste duikroer 5.7 en richtingsroer 5.8 met de holnieten 5.9 en zelftappers 5.10 licht<br />
beweegbaar aan de stabilisatievlakken monteren.<br />
• Bij de roerhevels 5.11 de tappen afsnijden, de snijvlakken vlaksc<strong>hu</strong>ren. Bij die roerhevels het binnenste<br />
gaatje tot 1,5 mm opboren.<br />
• De twee roerstangen 5.12 en 5.13 op maat (220 mm) maken, ieder aan het einde van een z-buiging<br />
voorzien en aan de roerhevels bevestigen.<br />
• De drie buitenmantels 5.14 op lengte (100 mm) maken.<br />
• Twee van deze buitenmantels op de stangen 5.12 en 5.13 sc<strong>hu</strong>iven.<br />
111
• De stangen inclusief mantels door de sleufgaten van deel 5.3 sc<strong>hu</strong>iven.<br />
• De stangen 4.11 en 5.12 alsmede 4.12 en 5.13 met de stelringen 5.15 en madenschroefjes 5.16<br />
onderling verbinden.<br />
• De roerhevels tegen de roervlakken houden. De stangen moeten zo veel mogelijk rechtlijnig en vrij<br />
van spanningen verlopen. Indien gewenst, de sleufgaten in deel 5.3 bijvijlen.<br />
• De roerhevels moeten zodanig op de roervlakken worden gepositioneerd, dat de stangen zich buiten<br />
de draaicirkel van de schroef bevinden.<br />
• De madenschroefjes 5.16 losdraaien. De roerhevels bij op neutraal gestelde roeren met secondenlijm<br />
vastlijmen. Let op: De gaatjes in de roerhevels resp. de stangen moeten zich precies in het draaipunt<br />
van de roervlakken bevinden - gestippelde lijn in de bovenaanzicht en de zijaanzicht raaplegen.<br />
• De schakelaarstang 5.17 aan een kant buigen, de derde buitenmantel 5.14 opsc<strong>hu</strong>iven.<br />
• De stang door het onderste sleufgat sc<strong>hu</strong>iven en met destelring 5.18 en madenschroefje 5.19 aan<br />
de stang 4.3 bevestigen.<br />
• Aan de achterkant de buitenmantels in de romp vastlijmen.<br />
Functiecontrole<br />
• Een functiecontrole uitvoeren. Eerst de zender inschakelen. De regelaarkuppel moet daarbij in de<br />
positie „motor uit“ staan.<br />
• De radiobesturing, door naar achteren trekken van de stang 5.17, inschakelen.<br />
112<br />
Let op:<br />
Omdat zowel de radiobesturing als de aandrijving uit de accu 4.2 worden gevoed, loopt de<br />
motor bij het inschakelen kort aan. Niet met de handen binnen draaicirkel of in de nabijheid<br />
van de schroef komen - gevaar voor verwonding.<br />
• De roervlakken moeten bij op „neutraal“ ingestelde servo’s (knuppels en trims van de zender in de<br />
middenstand) precies in de neutrale positie staan.<br />
• Voor het noodzakelijke bijtrimmen, het betreffende madenschroefje 5.16 losdraaien, de stang<br />
versc<strong>hu</strong>iven en het madenschroefje weer vastzetten.<br />
• De roeruitslagen en servo-draairichting controleren. Bij een onjuiste roerfunctie in de zender de<br />
servo-reverse omsteken.<br />
• Nogmaals de draairichting van de motor controleren. De schroef moet bij vooruitvaren, vanaf de<br />
achterkant gezien, linksom draaien.
Bouwfase 6: gereedmaken van de romp, delen 6.1-6.14<br />
• Aan de hand van de merktekens in het romp-achterdeel 6.1 de bovenste sleufgaten boren en uitvijlen.<br />
• Het bovenste romp-achterdeel aan de hand van de markeringen uitsnijden. Dit deel heeft, voor het<br />
nauwkeurig passend maken, aan beide kanten een overmaat van ca. 3 mm.<br />
• De sleuven voor de dempingsvlakken 5.1 zo nauwkeurig mogelijk uitwerken.<br />
• Voor het nauwkeurig bijsnijden resp. spelingvrij aanpassen van het bovendeel 6.1, bij het onderste<br />
deel 5.3 de zijdelingse zelftappers 5.4 losdraaien. Het bovendeel 6.1 zodanig opleggen, dat de nog<br />
overstekende langsranden tussen de drukkamerkap en de randen het onderste deel glijden.<br />
Deel 6.1 moet gelijk met de binnenrand van de onderste drukkamerkap liggen. De rug van de romp<br />
moet aan de voorkant op de drukkamerkap rusten en evenwijdig met de drukkamerbuis liggen.<br />
• Op deze manier kan de snijrand van deel 6.1 aan de hand van de randen van deel 5.3 worden<br />
afgetekend.<br />
• Deel 6.1 afnemen en door bijsnijden en -sc<strong>hu</strong>ren van de randen nauwkeurig aan het onderste deel<br />
aanpassen.<br />
• Op deze wijze, dus zoals beschreven, worden later eveneens de middendelen en voorste delen aan<br />
elkaar aangepast.<br />
• De zijdelingse zelftappers 5.4 weer indraaien.<br />
• De vergrendelplaatjes 6.2 en 6.3, voor het onderste en bovenste romp-achterdeel 5.3 en 6.1, aan<br />
de hand van de markering uit de halfronde voorkant van het onderste deel 5.3 snijden.<br />
• De plaatjes 6.2 volgens plan zodanig in het onderste achterdeel lijmen, dat ze voor ongeveer de<br />
halve materiaallengte over de bovenrand steken.<br />
• De positie van de bovenste plaatjes 6.3, tussen de onderste plaatjes 6.2 en de zijdelingse<br />
langssleuven in het onderste achterdeel, aan de buitenkant aftekenen. De plaatjes 6.3 in de<br />
binnenkant van het bovendeel lijmen.<br />
• Het bovenste deel 6.1 aanbrengen, spelingvrijheid ten opzichte van het onderste deel controleren.<br />
Eventueel de plaatjes in de ronding bijbuigen.<br />
• De verdubbelingen 6.4, voor het later vastschroeven, bijbuigen en volgens plan op de plaatjes 6.2<br />
lijmen.<br />
• Aan de bovenkant, in het midden, een 1,5 mm-gaatje door het romp-achterdeel 6.1 en de rand van<br />
de drukkamerkap boren en deel 6.1 met de zelftapper 6.5 vastzetten.<br />
• Bij de roereenheid de achterste 1,5 mm-gaatjes boren.<br />
• De positie van de resterende gaatjes aftekenen. Het bovenste romp-achterdeel 6.1 en de plaatjes<br />
met de verdubbelingen 6.4 gemeenschappelijk doorboren.<br />
• De achterste zelftappers 6.6 indraaien.<br />
• De gaatjes voor de zelftappers 6.7 door het romp-achterdeel 6.2 in de rand van de drukkamerkap<br />
boren - niet doorboren.<br />
113
• Het romp-achterdeel afnemen, pas dan de rand van de drukkamerkap doorboren.<br />
• Het romp-achterdeel weer aanbrengen en met de zelftappers 6.5-6.7 vastschroeven.<br />
• Bij het bovenste romp-middendeel 6.8 de sleufgaten boren en uitvijlen. Het middendeel aan de<br />
hand van de markeringen uitsnijden en de snijranden gladsc<strong>hu</strong>ren.<br />
• Het model in de standaard plaatsen en, zoals voorheen beschreven, horizontaal uitrichten. Als<br />
controle bij de stabilisatievlakken van het duikroer nameten.<br />
• Het bovenste romp-middendeel op de drukkamerbuis zetten en evenwijdig met de stabilisatievlakken<br />
uitrichten.<br />
• De gevonden positie van deel 6.8 aan beide kanten op de drukkamerbuis aftekenen.<br />
114<br />
Daarbij opletten, dat er tot het bovenste romp-achterdeel een spleet van ca. 2 mm wordt<br />
aangehouden, omdat anders later de O-ring 4.19 zich niet laat samendrukken.<br />
• Deel 6.8 met Stabilit-Express, die dun wordt aangebracht, alleen in het midden aan de drukkamerbuis<br />
lijmen; dus niet bij de randen en de voorste drukkamerkap.<br />
De achterste drukkamerkap alsmede de O-ring niet meelijmen.<br />
• Het onderste romp-middendeel 6.9 aan de hand van de markering bijsnijden en zodanig op de<br />
drukkamerbuis zetten, dat de randen van het bovendeel overlappen. Het middendeel aan beide<br />
kanten en over de gehele lengte spelingvrij aan het bovendeel aanpassen. Deel 6.9 moet vlak op de<br />
drukkamerbuis rusten.<br />
• Het bovenste en onderste deel aan de drukkamerbuis lijmen, maar niet aan de drukkamerkappen.<br />
Het onderste deel aan beide kanten met over de gehele lengte gespannen stroken Tesafilm fixeren.<br />
Nogmaals op de afwezigheid van spelingletten.<br />
• Het bovenste romp-voordeel 6.10 en onderste romp-voordeel 6.11 van sleufgaten voorzien. De gaatjes<br />
voor de voorste duikroeren nog niet boren.<br />
• Deel 6.10 op de rand van de voorste drukkamerkap leggen en met een liniaal ten opzichte van het<br />
middendeel uitrichten. Het voorste deel 6.10 in deze positie met Tesafilm fixeren.<br />
De liniaal kan als steun worden meegeplakt.<br />
• Het onderste romp-voordeel 6.11 spelingvrij aanpassen en op het bovenste romp-voordeel<br />
aanbrengen.<br />
• De delen aan de buitenkant over de volle lengte met een strook Tesafilm bij elkaar houden.<br />
• De op deze wijze vervaardigde rompneus bij wijze van proef op de romp zetten en de passing t.o.v.<br />
de drukkamerkap controleren. Let ook op de afwezigheid van speling t.o.v. het romp-middendeel.<br />
• De delen 6.10 en 6.11 aan de binnenkant met secondenlijm aan elkaar hechten. De vergrendelplaatjes<br />
6.12 aan de binnenkant lijmen; daarbij mag er geen plaatje in de nabijheid van de drukkamerkap<br />
komen. Aan de binnenkant de lijmplaatsen rondom met Stabilit-Express nalijmen.
• De kleefstroken 6.13, die u bij de decorstickers vindt, bij de rand van de drukkamerkap in de rompneus<br />
lijmen.<br />
• De rompneus aan de romp aanbrengen en ten opzichte van het romp-middendeel uitrichten.<br />
• Aan de omtrek de gaatjes aftekenen, boren en de rompneus met de zelftappers 6.14 aan de<br />
drukkamerkap vastschroeven.<br />
• De stroken Tesafilm pas bij het schilderen verwijderen.<br />
Bouwfase 7: de toren en voorste duikroeren, delen 7.1-7.13.<br />
• De boot in zijn standaard zodanig uitrichten, dat de achterste duikroereenheid zich precies evenwijdig<br />
met het werkvlak bevindt.<br />
• Aan de hand van de aanvormingen aan weerskanten de gaatjes voor de voorste duikroeren van de<br />
duikautomatiek aftekenen. Daartoe vanaf het werkvlak meten, om rechts en links dezelfde afstand<br />
te verkrijgen. Deze gaatjes moeten zich aan beide kanten op de ingezogen markeringen bevinden,<br />
om een onderling horizontaal verschil naar voren of achteren uit te sluiten.<br />
• De gaatjes stap voor stap tot 4 mm opboren.<br />
• De toren 7.1 uitsnijden en aan de onderkant vlaksc<strong>hu</strong>ren. De sleuf voor de radarmast (8.10) uitvijlen.<br />
De 3 mm- gaatjes in het torendeksel boren. De bovenste gaatjes voor de instelschroeven met 4<br />
mm boren. Het onderste gaatje voor de felsmoer met 3,2 mm boren.<br />
• De in tweevoud aanwezige torenspanten 7.2-7.4 per paar dekkend op elkaar lijmen.<br />
• De torenspant 7.2 volgens de markering en binnenste uitsparing alleen aan de rompneus lijmen.<br />
• De toren 7.1 bij wijze van proef opzetten en nauwkeurig controleren hoe deze op de romp zit.<br />
• De middelste torenspant 7.3 mogen we niet vastlijmen. Deze dient later voor het aanbrengen van<br />
de duikautomatiek.<br />
• De middelste torenspant 7.3 als afstanddeel geheel tegen de voorste torenspant 7.2 sc<strong>hu</strong>iven.<br />
• De achterste torenspant 7.4 positioneren en op het rompmiddendeel lijmen. De middelste torenspant<br />
uitnemen.<br />
• De rompneus losschroeven.<br />
• De koning (as) van het betreffende voorste duikroer 7.5 volgens tekening inkorten.<br />
• De holnieten 7.6 in de boringen van de rompneus drukken.<br />
• De roerhevel 7.7 volgens tekening bijsnijden. De stelring 7.8 indrukken en het boutje 7.9 indraaien.<br />
• De voorste stang 7.10 op lengte maken, aan een kant z-vormig buigen en aan de hevel bevestigen.<br />
• Het verbindingsbuisje 7.11 op maat maken en volgens tekening bij de uiteinden van een sleuf<br />
voorzien.<br />
115
• De stelringen 7.12 van madenschroefjes 7.13 voorzien.<br />
• De roerhevel en stelringen op het verbindingsbuisje sc<strong>hu</strong>iven.<br />
• De roeren aan weerskanten in de holnieten steken. Bij het samensc<strong>hu</strong>iven van de roeren tevens het<br />
verbindingsbuisje aanbrengen.<br />
• De roeren links en rechts in dezelfde positie zetten.<br />
• De stelringen zodanig draaien, dat de madenschroefjes zich boven de ingevijlde sleuven bevinden.<br />
Madenschroefjes vastzetten.<br />
• De roerhevel volgens het zijaanzicht uitrichten en het boutje 7.9 eveneens vastzetten.<br />
Bouwfase 8: de duikautomatiek, delen 8.1-8.27<br />
• In de verticale torenspanten 8.1 en 8.2 bij de centerpuntjes gaatjes van 3,2 mm boren. De felsmoeren<br />
8.3 indrukken en met secondenlijm zekeren.<br />
• Het <strong>hu</strong>lpboutje „HS“ door beide felsmoeren draaien en tussen de spanten een afstand van 26 mm<br />
instellen.<br />
• De eenheid in de toren aanbrengen en midden onder de sleuf uitrichten. De spanten met secondenlijm<br />
in de toren fixeren.<br />
• Het <strong>hu</strong>lpboutje eruit draaien.<br />
116<br />
Het boutje is via een van de instelgaatjes bereikbaar.<br />
• De twee boutjes 8.4 indraaien.<br />
• De moertjes 8.5 op de punt van de boutjes 8.4 draaien en alle bei met een tipje secondenlijm borgen.<br />
• De rompneus weer aanbrengen. De toren opzetten, nogmaals uitrichten en met Stabilit-Express<br />
alleen aan de voorste torenspant resp. de rompneus lijmen.<br />
• De verdubbelingen 8.6 gelijk met de buitenrand op de middelste torenspant 7.3 lijmen.<br />
• De lagerplaatjes 8.7 bij de centerpuntjes met 2 mm boren. Het <strong>hu</strong>lpboutje „HS“ door de gaatjes<br />
steken.<br />
• De lagerplaatjes in de sleuf tussen torenspant 7.3 en verdubbelingen 8.6 lijmen.<br />
• Het <strong>hu</strong>lpboutje uitnemen en de gaatjes tot 4 mm opboren.<br />
• De stelring 8.8 van madenschroefje 8.9 voorzien en op de radarmast 8.10 sc<strong>hu</strong>iven. De stelring precies<br />
volgens de aangegeven maat positioneren en het madenschroefje vastzetten.
• De soldeerlippen 8.11 aan de onderkant tegen de stelring sc<strong>hu</strong>iven, het einde 90ø draaien en<br />
ombuigen.<br />
• De soldeerlippen zowel onderling als aan de stelring solderen.<br />
• Een gaatje van 1,5 mm door het omgebogen gedeelte van de soldeerlip boren.<br />
• De <strong>hu</strong>ls 8.12 vanaf de onderkant op de radarmast sc<strong>hu</strong>iven.<br />
• De S-haak 8.13, voor het inhaken van de veer, aan de voet van de radarmast solderen.<br />
• De radarmast tussen de lagerplaatjes aanbrengen en met de boutjes 8.14 en holnieten 8.15<br />
bevestigen. De boutjes zover aandraaien dat de mast betrouwbaar vast zit, maar toch vrij draaibaar<br />
blijft.<br />
• De stang 8.16 op maat maken, aan een kant z-vormig buigen en in het gaatje van de soldeerlip<br />
hangen.<br />
• De rompneus met toren van het model nemen.<br />
• De radarmast vanaf de onderkant in de toren aanbrengen. De middelste torenspant met het complete<br />
mechanisme geheel tegen de voorste torenspant sc<strong>hu</strong>iven. De spant moet gelijk met de onderkant<br />
van de toren komen.<br />
• De positie van de vier zelftappers 8.17 aftekenen. Zowel de toren als de torenspant met 1,5 mm<br />
boren. Het mechanisme met de zelftappers 8.17 in de toren bevestigen.<br />
• De schroefhaak aan de S-haak 8.20, de veer 8.21 aan deS-haken 8.13 en 8.20 bevestigen.<br />
• De schroefhaak door het gaatje in de toren steken, de felsmoer 8.18 aan de buitenkant opdraaien<br />
en in het gaatje drukken.<br />
• De basisinstelling van de schroefhaak volgens plan uitvoeren.<br />
• De stangen 7.10 en 8.16 met de stelring 8.22 en madenschroefje 8.23 onderling verbinden. De voorste<br />
roervlakken moeten op ca. 2ø duikroer staan.<br />
• Het gereedgemaakte radarscherm 8.24 aan de stelring 8.25 lijmen.<br />
• Het radarscherm op de mast sc<strong>hu</strong>iven, de stelring met het madenschroefje 8.26 vastzetten.<br />
• Volgens plan in het radarscherm een gaatje van 1,5 mm boren.<br />
• Het draadje 8.27 volgens tekening buigen, op maat maken en in het gaatje van het radarscherm<br />
lijmen.<br />
117
Bouwfase 9: afsluitende werkzaamheden en uitbalanceren,<br />
delen 9.1-9.6<br />
• De toren-stabilisatievinnen 9.1 volgens de doorsnede profileren, de binnenkant aan de contour van<br />
de toren aanpassen en op <strong>hu</strong>n plaats lijmen. Rechts en links op dezelfde horizontale positie van de<br />
delen 9.1 letten.<br />
• De boot openen.<br />
• Volgens plan in de achterste drukkamerkap een 1 mm-gaatje voor de sprietantenne 9.2 boren. In de<br />
insc<strong>hu</strong>ifplaat twee gaatjes boren; als doorvoer en voor het op de juiste plaats leggen van de<br />
snoerantenne.<br />
• De snoerantenne 500 mm inkorten.<br />
• De sprietantenne 9.2 (staaldraad) door het gaatje in de drukkamerkap sc<strong>hu</strong>iven.<br />
• De verbinding tussen snoerantenne en sprietantenne door solderen of met een stekerverbinding<br />
tot stand brengen.<br />
• De sprietantenne met secondenlijm in het gaatje van de drukkamerkap vastzetten en aan de<br />
binnenkant met Stabilit-Express verlijmen.<br />
• De afdekplaat 9.3 volgens tekening bijsc<strong>hu</strong>ren, aan de rug van de romp aanpassen en op zijn plaats<br />
lijmen.<br />
• Het gat voor het ventiel 9.4 met 5,3 mm boren. Het ventiel inpersen en aan de buitenkant met<br />
secondenlijm verlijmen.<br />
• Na fijn bijsc<strong>hu</strong>ren van de aparte componenten is het model gereed om te schilderen.<br />
• Volgens plan met Stabilit-Express een loden plaatje 9.5 precies in het midden van de rompneus<br />
lijmen. Zes andere op elkaar gelijmde plaatjes dekkend op het eerste plaatje lijmen.<br />
• In het onderste achterdeel volgens tekening een plaatje 9.6 lijmen. Vijf andere plaatjes dekkend<br />
daarop lijmen.<br />
• Het model compleet samenbouwen.<br />
• Door blazen in het ventiel 9.4 de afdichting controleren. Er mag geen lucht naar buiten ontwijken.<br />
• Voor het fijntrimmen de onderzeeboot in een gevulde badkuip zetten. Het model moet zodanig worden<br />
getrimd, dat het horizontaal drijft en tot de bovenste rand van de romprug in het water ligt.<br />
• Voor het bereiken van deze diepgang en ligging zullen er voorin ongeveer twee loden plaatjes, en<br />
achterin anderhalf plaatje nodig zijn. De plaatjes eerst aan de buitenkant op de boot leggen. Na<br />
nauwkeurig bepalen van de afmetingen en aantal, de plaatjes zodanig inlijmen dat het model niet<br />
scheef ligt.<br />
• Voordat de maidentrip wordt uitgevoerd, moet de schroefas met koker worden gesmeerd. Daartoe<br />
de vetspuit op de smeernippel zetten en de schroefaskoker geheel met vet vullen.<br />
118
12. Het instellen van de duikautomatiek<br />
Voordat de eerste proefvaarten worden gemaakt, moet de basisinstelling van de duikautomatiek<br />
nauwkeurig aan de hand van het plan worden uitgevoerd.<br />
Als met toenemende routine een verandering van de duikverhoudingen gewenst is, kunnen we als volgt<br />
tewerk gaan:<br />
• Als we het voorste boutje 8.4 uitdraaien, worden de voorste duikroeren verder naar omlaag versteld;<br />
de boot duikt dan sneller.<br />
• Bij indraaien van het boutje wordt de instelling van de roeren teruggeregeld; het duiken geschiedt<br />
dan langzamer.<br />
De veer 8.21 moet, door uittrekken en overeenkomstig verdraaien van de felsmoer 8.18, meer of<br />
minder strak worden gespannen.<br />
• Uitdraaien van het achterste boutje 8.4 resulteert in sneller opduiken, bij indraaien wordt de duikvaart<br />
verlengd. Ook hierbij moet de veer 8.21 worden bijgesteld.<br />
Vaartips voor de maidentrip<br />
Het is zinvol om de top van de sprietantenne van een kleine wimpel uit gekleurde decorfolie te voorzien,<br />
om de boot bij de eerste duikvaarten beter herkenbaar te maken.<br />
Kies voor de eerste vaarten een zo helder mogelijk water zonder wier etc.<br />
Het model in het water leggen en langzaam gas geven. In het begin moeten we niet dieper dan de top<br />
van de antenne duiken en niet met volgas varen. Als het duikroer functionerend is uitgevoerd, dit bij de<br />
eerste proefvaarten nog niet benutten, om eventueel beginnende, abrupte duikneigingen te voorkomen.<br />
119
13. Stuklist<br />
Bouwfase 1: voorbereiden van de aandrijving<br />
Nr. Benaming Materiaal Maten in mm Aantal Opmerking<br />
1.1 elektromotor met tandwiel --- gereed deel 1 niet aanwezig<br />
1.2 ontstoorcondensator --- 100 nF 2 niet aanwezig<br />
1.3 ontstoorcondensator --- 47 nF 1 niet aanwezig<br />
1.4 isolatiekous Ku gereed deel 4 niet aanwezig<br />
1.5 motor-aansluitsnoer Cu/Ku gereed deel 1 niet aanwezig<br />
1.6 accusnoer met stekerbusjes Cu/Ku gereed deel 1 niet aanwezig<br />
1.7 AMP-Faston vlakke stekerbus --- gereed deel 2 niet aanwezig<br />
1.8 drukkamerkap achter ABS spuitgietdeel 1<br />
1.9 schroefaskoker met tandwiel<strong>hu</strong>is MS/Ku gereed deel 1<br />
1.10 smeernippelsteun MS gereed deel 1<br />
1.11 smeernippel staal gereed deel 1<br />
1.12 schroefas met tandwiel staal/Ku gereed deel 1<br />
1.13 tandwiel<strong>hu</strong>isdeksel Ku spuitgietdeel 1<br />
1.14 inbusboutje staal M 3 x 10 2<br />
120
Bouwfase 2: insc<strong>hu</strong>ifeenheid voor de aandrijving<br />
Nr. Benaming Materiaal Maten in mm Aantal Opmerking<br />
2.1 moertje staal M 3 1<br />
2.2 draadstang staal M 3 x 80 1<br />
2.3 insc<strong>hu</strong>ifplaat ABS 3 stansdeel 1<br />
2.4 spant achter ABS 3 stansdeel 1<br />
2.5 spant voor ABS 3 stansdeel 1<br />
2.6 profiel ABS T-profiel, 2<br />
op maat maken<br />
2.7 hoeksteun voor ABS 3 stansdeel 2<br />
2.8 hoeksteun achter ABS 3 stansdeel 2<br />
2.9 afstandplaatje ABS 2 stansdeel 2<br />
2.10 ondersteuning ABS 2 stansdeel 1<br />
2.11 bevestigingsplaatje voor ABS 3 stansdeel 2<br />
aandrijving<br />
2.12 sluitring MS d 2,6 inwendig 2<br />
2.13 zelftapper staal d 2,2 x 4,5 2<br />
2.14 schakelaarspant ABS 3 stansdeel 1<br />
2.15 buitenmantel voor duikroerstang Ku d 2,2 x d 3,2 1<br />
op maat maken<br />
2.16 buitenmantel voor Ku d 2,2 x d 3,2 1<br />
richtingsroerstang op maat maken<br />
Bouwfase 3: montage van de drukkamerbuis<br />
Nr. Benaming Materiaal Maten in mm Aantal Opmerking<br />
3.1 profiel ABS T-profiel, 320 lang 1<br />
3.2 drukkamerbuis ABS 345 lang 1<br />
3.3 drukkamerkap voor ABS spuitgietdeel 1<br />
3.4 borgmoer staal M 3 1<br />
121
Bouwfase 4: de inbouw van de radiobesturing<br />
Nr. Benaming Materiaal Maten in mm Aantal Opmerking<br />
4.1 accusteun ABS 2 stansdeel 4<br />
4.2 vaaraccu --- gereed deel 1 niet aanwezig<br />
4.3 bedieningsstang voor schakelaar MS d 1,5 1<br />
op maat maken<br />
4.4 schakelaar --- gereed deel 1 niet aanwezig<br />
4.5 stelring MS d 2,2 x d 7 x 5 1<br />
4.6 madenschroefje staal M 3 x 3 1<br />
4.7 manchet voor stang 4.3 rubber gereed deel 1<br />
4.8 steun voor buitenmantel ABS 3 stansdeel 2<br />
4.9 madenschroefje staal M 3 x 6 1<br />
4.10 stelring MS d 4,2 x d 7 x 5 1<br />
4.11 duikroer-aanstuurstang MS d 1,5 x 420 1<br />
4.12 richtingsroer-aanstuurstang MS d 1,5 x 480 1<br />
4.13 duikroerservo --- gereed deel 1 niet aanwezig<br />
4.14 richtingsroerservo --- gereed deel 1 niet aanwezig<br />
4.15 dubbelzijdig kleefband Ku 1,6 x 19 x 50 8<br />
4.16 ontvanger --- gereed deel 1 niet aanwezig<br />
4.17 regelaar --- gereed deel 1 niet aanwezig<br />
4.18 manchet voor stangen 4.11/4.12 rubber gereed deel 2<br />
4.19 O-ring rubber d 85 1<br />
122
Bouwfase 5: de roereenheid<br />
Nr. Benaming Materiaal Maten in mm Aantal Opmerking<br />
5.1 stabilisatievlak Ku spuitgietdeel 4<br />
5.2 middendeel Ku spuitgietdeel 1<br />
5.3 romp-achterdeel onder ABS vacuümgezogen 1<br />
deel<br />
5.4 zelftapper staal d 3,2 x 6,5 3<br />
5.5 contramoer MS M 4 1<br />
5.6 schroef Ku d 50, drieblad 1<br />
5.7 duikroer Ku spuitgietdeel 1<br />
5.8 richtingsroer Ku spuitgietdeel 1<br />
5.9 holniet MS gereed deel 4<br />
5.10 zelftapper staal d 2,2 x 11 4<br />
5.11 roerhevel Ku spuitgietdeel 2<br />
5.12 duikroerstang MS 1,5 x 220 1<br />
5.13 richtingsroerstang MS 1,5 x 220 1<br />
5.14 buitenmantel Ku d 2,2 x d 3,2 x 100 3<br />
5.15 stelring MS d 3,2 x d 7 x 5 2<br />
5.16 madenschroefje staal M 3 x 3 2<br />
5.17 schakelaarstang MS d 1,5 1<br />
op maat maken<br />
5.18 stelring MS d 3,2 x d 7 x 5 1<br />
5.19 Madenschroefje staal M 3 x 3 1<br />
123
Bouwfase 6: gereedmaken van de romp<br />
Nr. Benaming Materiaal Maten in mm Aantal Opmerking<br />
6.1 romp-achterdeel boven ABS 1,5 vacuüm- 1<br />
gezogen deel<br />
6.2 vergrendelplaatje ABS 1,5 vacuüm- 4<br />
gezogen deel<br />
6.3 vergrendelplaatje ABS 1,5 vacuüm- 4<br />
gezogen deel<br />
6.4 verdubbeling ABS 1,5 vacuüm- 4<br />
gezogen deel<br />
6.5 zelftapper staal d 2,2 x 6,5 1<br />
6.6 zelftapper staal d 2,2 x 6,5 4<br />
6.7 zelftapper staal d 2,2 x 6,5 2<br />
6.8 romp-middendeel boven ABS 1,5 vacuüm- 1<br />
gezogen deel<br />
6.9 romp-middendeel onder ABS 1,5 vacuüm- 1<br />
gezogen deel<br />
6.10 romp-voordeel boven ABS 1,5 vacuüm- 1<br />
gezogen deel<br />
6.11 romp-voordeel onder ABS 1,5 vacuüm- 1<br />
gezogen deel<br />
6.12 vergrendelplaatjes ABS 1,5 vacuüm- 6<br />
gezogen deel<br />
6.13 plakstrook Ku decorsticker 2<br />
6.14 zelftapper staal d 2,2 x 6,5 4<br />
124
Bouwfase 7: de toren en voorste duikroeren<br />
Nr. Benaming Materiaal Maten in mm Aantal Opmerking<br />
7.1 toren ABS 1,5 vacuüm 1<br />
gezogen deel<br />
7.2 torenspanten ABS 2 stansdeel elk 2<br />
7.3 torenspanten ABS 2 stansdeel elk 2<br />
7.4 torenspanten ABS 2 stansdeel elk 2<br />
7.5 duikroer voor Ku/MS spuitgietdeel 2<br />
7.6 holniet MS d 4 x 0,4 x 4 2<br />
7.7 roerhevel Ku spuitgietdeel 1<br />
7.8 stelring MS d 4 x d 7 x 5 1<br />
7.9 madenschroefje staal M 3 x 6 1<br />
7.10 stang voor MS d 1,5 1<br />
op maat maken<br />
7.11 verbindingsbuisje MS d 3,2 x d 4 1<br />
aanpassen<br />
7.12 stelring MS d 4 x d 7 x 5 2<br />
7.13 madenschroefje staal M 3 x 6 2<br />
125
Bouwfase 8: de duikautomatiek<br />
Nr. Benaming Materiaal Maten in mm Aantal Opmerking<br />
8.1 torenspant ABS 3 stansdeel 1<br />
8.2 torenspant ABS 3 stansdeel 1<br />
8.3 felsmoer MS M 2 2<br />
"HS" <strong>hu</strong>lpboutje MS M 2 x 35 1<br />
8.4 boutje MS M 2 x 20 2<br />
8.5 moertje MS M 2 2<br />
8.6 verdubbeling ABS 3 stansdeel 2<br />
8.7 lagerplaatje ABS 3 stansdeel 2<br />
8.8 stelring MS d 4 x d 7 x 5 1<br />
8.9 madenschroefje staal M 3 x 3 1<br />
8.10 radarmast MS-buis d 4 op maat maken 1<br />
8.11 soldeerlip MS gereed deel 2<br />
8.12 <strong>hu</strong>ls Alu gedraaid deel 1<br />
8.13 S-haak MS gereed deel 1<br />
8.14 boutje MS M 3 x 10 2<br />
8.15 holniet MS d 4 x 0,4 x 4 2<br />
8.16 stang MS d 1,5<br />
op maat maken<br />
1<br />
8.17 zelftapper staal d 2,2 x 6,5 4<br />
8.18 felsmoer MS M 2 1<br />
8.19 schroefoog MS M 2 gereed deel 1<br />
8.20 S-haak MS gereed deel 1<br />
8.21 spiraalveer staal gereed deel 1<br />
8.22 stelring MS d 3 x d 7 x 5 1<br />
8.23 madenschroefje staal M 3 x 3 1<br />
8.24 radarscherm ABS 1,5 vacuümgezogen<br />
deel<br />
1<br />
8.25 stelring MS d 4 x d 7 x 5 1<br />
8.26 madenschroefje staal M 3 x 3 1<br />
8.27 beugel MS d 1,5 volgens plan 1<br />
126
Bouwfase 9: afsluitende werkzaamheden en uitbalanceren<br />
Nr. Benaming Materiaal Maten in mm Aantal Opmerking<br />
9.1 toren-stabilisatievin ABS 2 stansdeel 2<br />
9.2 sprietantenne staaldraad d 0,8 x 500 1<br />
9.3 afdekplaat ABS 3 stansdeel 1<br />
9.4 ventiel compl. staal gereed deel 1<br />
9.5 ballast voor lood ca. 440 g 1 niet aanwezig<br />
9.6 ballast achter lood ca. 350 g 1 niet aanwezig<br />
127
"0"<br />
128<br />
0.1<br />
0.1<br />
0.2<br />
300<br />
340 x 195 x 10
129
130
131
http://www.conrad.com<br />
100%<br />
Recycling-<br />
Papier.<br />
Chlorfrei<br />
gebleicht.<br />
Impressum<br />
Diese Bedienungsanleitung ist eine Publikation der Conrad <strong>Electronic</strong> GmbH,<br />
Klaus-Conrad-Straße 1, D-92240 Hirschau.<br />
Alle Rechte einschließlich Übersetzung vorbehalten. Reproduktionen jeder Art,<br />
z. B. Fotokopie, Mikroverfilmung, oder die Erfassung in EDV-Anlagen, bedürfen der<br />
schriftlichen Genehmigung des Herausgebers.<br />
Nachdruck, auch auszugsweise, verboten.<br />
Diese Bedienungsanleitung entspricht dem technischen Stand bei Drucklegung.<br />
Änderung in Technik und Ausstattung vorbehalten.<br />
© Copyright 2006 by Conrad <strong>Electronic</strong> GmbH. Printed in Germany.<br />
*2006/01/19mbe