

Kapitel 5. Kontinuierliche LTI-Systeme Beispiel 5â4: Bodediagramm ...
Kapitel 5. Kontinuierliche LTI-Systeme Beispiel 5â4: Bodediagramm ...
Kapitel 5. Kontinuierliche LTI-Systeme Beispiel 5â4: Bodediagramm ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Kapitel</strong> <strong>5.</strong> <strong>Kontinuierliche</strong> <strong>LTI</strong>-<strong>Systeme</strong><br />
<strong>Beispiel</strong> 5–4: <strong>Bodediagramm</strong><br />
Konstruieren Sie das <strong>Bodediagramm</strong> der folgenden Übertragungsfunktion.<br />
H(s) =<br />
(s + 5)<br />
s(s + 2)<br />
Lösung: Diese Übertragungsfunktion besteht aus zwei Lineartermen in Zähler und Nenner, sowie<br />
einem Integrator. Im ersten Schritt wird die Übertragungsfunktion wieder normiert:<br />
(s + 5)<br />
H(s) =<br />
s(s + 2)<br />
5( s 5<br />
=<br />
+ 1)<br />
s · 2( s 2 + 1)<br />
= 5 2 · 1 s<br />
s · 5 + 1<br />
s<br />
2 + 1<br />
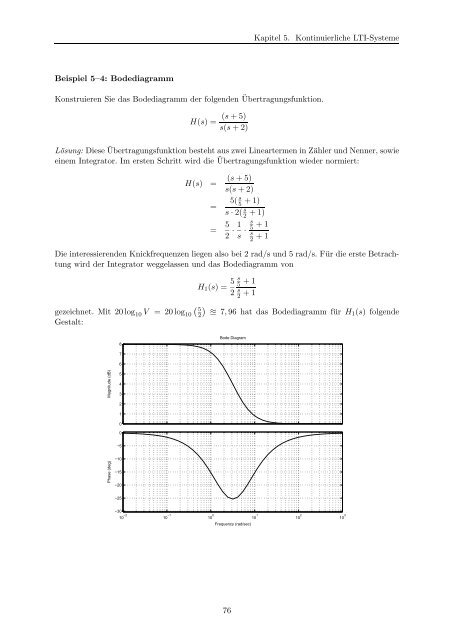
Die interessierenden Knickfrequenzen liegen also bei 2 rad/s und 5 rad/s. Für die erste Betrachtung<br />
wird der Integrator weggelassen und das <strong>Bodediagramm</strong> von<br />
H 1 (s) = 5 2<br />
s<br />
5 + 1<br />
s<br />
2 + 1<br />
gezeichnet. Mit 20 log 10 V = 20 log 10<br />
( 5<br />
2)<br />
≅ 7, 96 hat das <strong>Bodediagramm</strong> für H1 (s) folgende<br />
Gestalt:<br />
8<br />
Bode Diagram<br />
7<br />
6<br />
Phase (deg) Magnitude (dB)<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
0<br />
−5<br />
−10<br />
−15<br />
−20<br />
−25<br />
−30<br />
10 −2 10 −1 10 0 10 1 10 2 10 3<br />
Frequency (rad/sec)<br />
76
<strong>Kapitel</strong> <strong>5.</strong> <strong>Kontinuierliche</strong> <strong>LTI</strong>-<strong>Systeme</strong><br />
Nun betrachten wir den Integrator separat, d.h die Übertragungsfunktion<br />
H 2 (s) = 1 s .<br />
Bestimmt man Betrags- und Phasengang analytisch,<br />
H(s = jω) = 1<br />
jω<br />
∣<br />
∣H(jω) ∣ =<br />
1<br />
∣jω<br />
∣ = |1|<br />
|jω| = 1 ω<br />
oder in dB<br />
( ) 1<br />
20 log 10 = 20 log<br />
ω<br />
10 (1) − 20 log 10 (ω) = −20 log(ω),<br />
so ist das Verhalten dieses Termes relativ einfach ersichtlich: ein Integrator erzeugt im Betragsgang<br />
einen konstanten Abfall von 20 dB/Dekade und tritt bei 1 rad/s durch die 0 dB-Linie. Für<br />
den Phasengang gilt<br />
arg ( H(jω) ) ( ) ( ( )<br />
1<br />
1 0<br />
= arg = arctan − arctan = arctan(1) = −<br />
jω<br />
1)<br />
π ω 2 ˆ= − 90◦ .<br />
Der Integrator bewirkt also eine Phasendrehung um den konstanten Wert −90 ◦ . Das sieht im<br />
<strong>Bodediagramm</strong> folgendermaßen aus:<br />
40<br />
Bode Diagram<br />
20<br />
Phase (deg) Magnitude (dB)<br />
0<br />
−20<br />
−40<br />
−60<br />
−89<br />
−89.5<br />
−90<br />
−90.5<br />
−91<br />
10 −2 10 −1 10 0 10 1 10 2 10 3<br />
Frequency (rad/sec)<br />
77
<strong>Kapitel</strong> <strong>5.</strong> <strong>Kontinuierliche</strong> <strong>LTI</strong>-<strong>Systeme</strong><br />
Durch Superposition (Addition) ergibt sich das <strong>Bodediagramm</strong> der gesamten Übertragungsfunktion<br />
H(s) = H 1 (s)H 2 (s):<br />
60<br />
Bode Diagram<br />
40<br />
Phase (deg) Magnitude (dB)<br />
20<br />
0<br />
−20<br />
−40<br />
−60<br />
−90<br />
−95<br />
−100<br />
−105<br />
−110<br />
−115<br />
−120<br />
10 −2 10 −1 10 0 10 1 10 2 10 3<br />
Frequency (rad/sec)<br />
78

