Simulation von Schienenfahrzeugen mit hydraulischen Komponenten
Simulation von Schienenfahrzeugen mit hydraulischen Komponenten
Simulation von Schienenfahrzeugen mit hydraulischen Komponenten

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Simulation</strong> <strong>von</strong> <strong>Schienenfahrzeugen</strong> <strong>mit</strong> <strong>hydraulischen</strong> <strong>Komponenten</strong><br />
Prof. Helduser, Dipl.-Ing. Stüwing, Institut für Fluidtechnik (IFD), TU Dresden,<br />
Prof. Liebig, Dipl.-Ing. Dronka, Institut für Theoretische Grundlagen der Fahrzeugtechnik<br />
(ITGF), TU Dresden<br />
1 Einleitung<br />
Bedingt durch die gewachsenen Anforderungen an die dynamischen Eigenschaften <strong>von</strong> <strong>Schienenfahrzeugen</strong><br />
– höhere Geschwindigkeiten bei gleichem oder besserem Komfort und gleicher oder<br />
verbesserter Fahrstabilität zu erreichen - werden immer häufiger aktive <strong>Komponenten</strong> zur gezielten<br />
Beeinflussung bestimmter dynamischer Eigenschaften eingesetzt. Beispiele hierfür in der Schienenfahrzeugtechnik<br />
sind die aktive Neigetechnik, aktive und semiaktive Fahrzeugfederungen (vertikal und<br />
horizontal) und die aktive Radsatzsteuerung.<br />
Für die Auslegung und Untersuchung solcher Systeme, die aus Teilsystemen verschiedener Ingenieurdisziplinen<br />
bestehen, werden u.a. <strong>Simulation</strong>sprogramme eingesetzt, die auf der numerischen<br />
Approximation der Modellgleichungen (Gewöhnliche Differentialgleichungen oder Differential-Algebraische<br />
Gleichungen) über der Zeit beruhen. Für das in unserem Fall untersuchte Beispielsystem eines<br />
Schienenfahrzeuges <strong>mit</strong> aktiver hydraulischer Neigetechnik, sind hierbei das mechanische Teilsystem<br />
Fahrzeug (Modellierung als Mehrkörpersystem – MKS) und das Teilsystem Neigetechnik-Hydraulik zu<br />
modellieren und für Untersuchungen am Gesamtsystem geeignet zusammenzufassen und zu<br />
simulieren (gekoppelte <strong>Simulation</strong>).<br />
Die Entwicklung <strong>von</strong> Werkzeugen, die sowohl den Gesamtsystemhersteller bei der Untersuchung<br />
solcher Systeme als auch die Teilsystemhersteller bei der Entwicklung der Teilsysteme unter Berücksichtigung<br />
des Einflusses der weiteren Teilsysteme unterstützen, ist das Ziel des vom IFD und ITGF<br />
gemeinsam bearbeiteten Projekts „Entwicklungswerkzeuge für Schienenfahrzeuge <strong>mit</strong> <strong>hydraulischen</strong><br />
<strong>Komponenten</strong>“. Das Vorhaben wird im Rahmen der AiF-Forschungsförderung (AiF-Nr. 12074 B/1) im<br />
Fachverband Fluidtechnik des VDMA durchgeführt. Der erste Schwerpunkt liegt hierbei in der programmtechnischen<br />
Umsetzung einer gekoppelten <strong>Simulation</strong> <strong>von</strong> MKS- und Hydraulik-Teilsystemen<br />
unter Verwendung <strong>von</strong> Standardsoftware für Modellierung und <strong>Simulation</strong>. Der zweite Schwerpunkt ist<br />
der Aufbau eines Hardware-in-the-Loop-Prüfstandes (HIL), der Untersuchungen am realen Neigetechnik-Hydrauliksystem<br />
in einer virtuellen Testumgebung unter annähernd realen Bedingungen wie im<br />
Schienenfahrzeug erlaubt.<br />
2 Softwarekonzept der realisierten Lösung<br />
Nachdem die verschiedenen Möglichkeiten einer gekoppelten <strong>Simulation</strong>, die Funktionalität verschiedener<br />
Werkzeuge und die Erfahrungen beider Institute bei der Realisierung bisheriger Lösungen<br />
ausgewertet worden sind, wurden für die Realisierung der beiden Schwerpunkte Gekoppelte <strong>Simulation</strong><br />
und HIL-Prüfstand die folgenden Anforderungen an das Softwarekonzept formuliert:<br />
• Die Modellierung der Teilsysteme Fahrzeug (als MKS) und Hydraulik soll in speziellen, an die<br />
Anforderungen der jeweiligen Ingenieurdisziplin angepassten Werkzeugen vorgenommen werden.<br />
Dieses gestattet dem Experten der entsprechenden Ingenieurdisziplin die Modellierung des<br />
Teilsystems in der bekannten Modellierungsumgebung und im gewünschten Detaillierungsgrad.<br />
• Der Aufbau des HIL-Prüfstandes verlangt die Echtzeitsimulation des gekoppelten Modells, d.h. den<br />
Übergang der gekoppelten <strong>Simulation</strong> auf eine Echtzeitplattform. Bei der Auswahl der Modellbildungs-Werkzeuge<br />
war daher darauf zu achten, dass diese einen späteren Übergang auf eine<br />
Echtzeitplattform zulassen, d.h. die Modellgleichungen in einem transferierbaren Format exportiert<br />
werden können.<br />
• Für Modellbildung und <strong>Simulation</strong> als auch für den Übergang auf die Echtzeithardware sollen<br />
kommerzielle Standardentwicklungswerkzeuge eingesetzt werden. Da<strong>mit</strong> sind für diese Werkzeuge<br />
zum einen Weiterentwicklung und Support durch den Softwarehersteller und zum anderen<br />
Akzeptanz für eine Anwendung des Werkzeuges in der Industrie gesichert.<br />
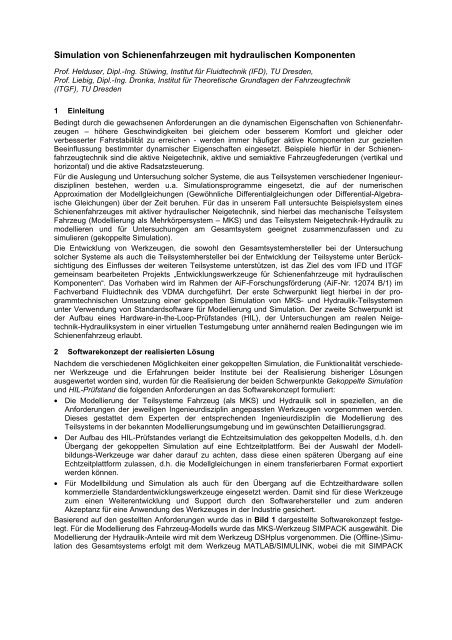
Basierend auf den gestellten Anforderungen wurde das in Bild 1 dargestellte Softwarekonzept festgelegt.<br />
Für die Modellierung des Fahrzeug-Modells wurde das MKS-Werkzeug SIMPACK ausgewählt. Die<br />
Modellierung der Hydraulik-Anteile wird <strong>mit</strong> dem Werkzeug DSHplus vorgenommen. Die (Offline-)<strong>Simulation</strong><br />
des Gesamtsystems erfolgt <strong>mit</strong> dem Werkzeug MATLAB/SIMULINK, wobei die <strong>mit</strong> SIMPACK
zw. DSHplus erstellten Teilmodelle automatisiert über die Standard-Schnittstelle S-Function in SIMU-<br />
LINK eingebunden werden. Der Übergang <strong>von</strong> der Offline-<strong>Simulation</strong> der gekoppelten Teilsysteme in<br />
SIMULINK zur Echtzeitsimulation wird <strong>mit</strong> Unterstützung der Funktionalität des zur MATLAB-Gruppe<br />
gehörenden Werkzeuges Real-Time-Workshop (RTW) vorgenommen.<br />
MKS-<strong>Simulation</strong>swerkzeug<br />
SIMPACK<br />
Hydraulik-<strong>Simulation</strong>swerkzeug<br />
F<br />
x, v, a<br />
DSHplus<br />
Modellexport (FORTRAN)<br />
S-Function<br />
Modellexport<br />
(C++)<br />
Hydraulik-<br />
Modell<br />
MATLAB/SIMULINK:<br />
Gekoppelte <strong>Simulation</strong><br />
<strong>Simulation</strong>ssteuerung<br />
Real-Time-<br />
Workshop<br />
S-Function<br />
Echtzeit-<br />
<strong>Simulation</strong><br />
RT-LAB<br />
f2c (C)<br />
MKS-<br />
Modell<br />
Übergang auf<br />
Echtzeithardware<br />
RT-LAB<br />
Routinen<br />
umgebung<br />
Echtzeit-<br />
P 1 P 2<br />
P 3<br />
Bild 1: Softwarekonzept<br />
Als Plattform für die Echtzeitsimulation wurde das System RT-LAB der Firma OPAL-RT ausgewählt.<br />
Drei unter dem Echtzeitbetriebssystem QNX arbeitende, handelsübliche PC werden durch das echtzeitfähige<br />
Netzwerk FireWire <strong>mit</strong>einander verbunden und arbeiten so<strong>mit</strong> als verteiltes Mehrprozessorsystem<br />
<strong>mit</strong> leistungsfähigen Echtzeitknoten. Das System wird als Zielsystem vom RTW unterstützt, so<br />
dass kein Entwicklungsaufwand für die Realisierung der Echtzeitfunktionalität notwendig ist.<br />
3 HIL-Prüfstand<br />
Der Aufbau und Betrieb des HIL-Prüfstandes erfordert neben der Erweiterung der gekoppelten <strong>Simulation</strong><br />
zur Echtzeitsimulation weiterhin die Entwicklung einer Lastsimulation für die Nachbildung der auf<br />
die Anlenkpunkte des Testzylinders wirkenden reduzierten Fahrzeugmasse.<br />
Im HIL-Prüfstand, Bild 2, sind zwei gegeneinander arbeitende Zylinder eingebaut: der zu testende<br />
Neigetechnik-Zylinder und der Lastzylinder, welcher die auf den Neigetechnik-Zylinder reduzierten Bewegungen<br />
des „virtuellen“ Fahrzeuges auf diesen zurückgeben soll. Entsprechend seiner Ansteuerung<br />
wird der Neigetechnik-Zylinder eine Kraft erzeugen. Aufgrund dieser Kraft, die als Eingangsgröße der<br />
MKS-<strong>Simulation</strong> übergeben wird, werden die Bewegungen der Einzelkörper des Fahrzeugs durch das<br />
in Echtzeit simulierte Fahrzeugmodell berechnet. Nach der Berechnung eines Zeitschrittes ergibt sich<br />
eine neue Lage des Fahrzeuges und so<strong>mit</strong> auch eine veränderte Länge des NT-Zylinders (im virtuellen<br />
Fahrzeug). Diese Längenveränderung wird durch den zweiten, dem Neigetechnik-Zylinder entgegen<br />
wirkenden Last-Zylinder abgebildet, wobei hier durch eine entsprechende Regelung des Last-Zylinders<br />
eine minimal verzögerte Nachbildung der Lageänderung erreicht werden soll. Die Entwicklung dieser<br />
Lastsimulation ist Entwicklungsgegenstand am IFD und soll hier nicht weiter beschrieben werden.<br />
4 Ergebnisse<br />
Die gekoppelte <strong>Simulation</strong> in Simulink auf Basis der eingebundenen Teilmodelle aus SIMPACK und<br />
DSHplus wurde realisiert und deren Funktionsfähigkeit an einfachen Beispielen nachgewiesen. Für die<br />
Einbindung <strong>von</strong> Schienenfahrzeug-Modellen aus SIMPACK wurde die Standard-Export-Schnittstelle um<br />
die Funktionalität der Fahrweg-Beschreibung erweitert, so dass <strong>mit</strong> den exportierten Modellen die<br />
<strong>Simulation</strong> <strong>von</strong> Fahrzeugen <strong>mit</strong> den in SIMPACK definierten Fahrwegen möglich ist. Das aus SIMPACK<br />
exportierte Fahrzeugmodell wird in einem Zwischenschritt <strong>mit</strong> Hilfe des Programmes f2c <strong>von</strong> der<br />
Programmiersprache FORTRAN in C umgesetzt, da dies für eine spätere Weiterverwendung auf der
Echtzeitplattform notwendig ist. Beide Schritte, der Export aus SIMPACK und die Konvertierung,<br />
wurden weitgehend automatisiert. Für die Einbindung der Hydraulik-Modelle aus DSHplus wurde eine<br />
S-Function programmiert. Die notwendigen Daten für die Einbindung der Modelle in Simulink werden in<br />
entsprechend programmierten Fenstern abgefragt und weiterverarbeitet, so dass der Benutzer <strong>von</strong> der<br />
genauen Kenntnis der einzelnen Vorgänge für das Einbinden befreit wird.<br />
Hydraulik-Modul<br />
MKS-Modul<br />
Neigetechnikantrieb<br />
Echtzeit-<br />
<strong>Simulation</strong><br />
Bewegungen<br />
Antriebsverhalten<br />
Lastantrieb<br />
Positionssignal<br />
Neigetechnik-Achse<br />
Beschleunigungssensor<br />
Wegsensor<br />
Lastachse<br />
Kraftsensor<br />
gelagerte Verbindung<br />
Bild 2: Skizze HIL-Prüfstand<br />
Zur Zeit wird an der Portierung der gekoppelten <strong>Simulation</strong> auf die Echtzeitplattform gearbeitet. Infolge<br />
der Gewährleistung der Echtzeitfähigkeit der gekoppelten <strong>Simulation</strong> sind Einschränkungen in der Wahl<br />
der Integrationsmethoden, der Methode zur Lösung des Gesamtsystems und der Komplexität der Modelle<br />
vorhanden, die derzeit untersucht werden. Weiterhin werden Möglichkeiten der Modularisierung<br />
der Modelle untersucht, um bei Verletzung der Echtzeitanforderungen eine Substrukturierung der<br />
Teilmodelle und da<strong>mit</strong> eine Verteilung der Rechenlast vornehmen zu können.<br />
5 Zusammenfassung und Ausblick<br />
Aufgrund des gewählten Softwarekonzeptes ergeben sich aus unserer Sicht für Anwendung und Erweiterung<br />
des Werkzeuges mehrere Vorteile:<br />
• Durch den Einsatz der ausgewählten allgemeinen Werkzeuge für die Modellbildung der Teilsysteme<br />
MKS und Hydraulik ist die Anwendung der beschriebenen Teilsystemkopplung nicht auf die Modellierung<br />
<strong>von</strong> <strong>Schienenfahrzeugen</strong> <strong>mit</strong> <strong>hydraulischen</strong> <strong>Komponenten</strong> begrenzt. Generell können alle<br />
<strong>mit</strong> SIMPACK bzw. DSHplus modellierbaren Systeme eingebunden werden. Im Fall <strong>von</strong> DSHplus<br />
sind so<strong>mit</strong> auch pneumatische Systeme modellierbar.<br />
• Die Verwendung einer Standard-Schnittstelle <strong>von</strong> Simulink gestattet für die gekoppelte <strong>Simulation</strong><br />
und den Übergang zur Echtzeitsimulation prinzipiell auch die Einbindung <strong>von</strong> Modellen anderer oder<br />
zusätzlicher Programme für MKS, Hydraulik oder anderer Ingenieurdisziplinen, sofern diese<br />
Programme die Möglichkeit besitzen, ihre Modelle, d.h. die Modellgleichungen, zu exportieren und<br />
eine entsprechende Schnittstellenroutine für Simulink existiert.<br />
• Durch den Einsatz des Software-Werkzeuges MATLAB/SIMULINK und die Verwendung des RTW<br />
für die Unterstützung beim Übergang zur Echtzeitsimulation ist ein durchgängiger Entwicklungsprozeß<br />
<strong>von</strong> der Offline-<strong>Simulation</strong> des Gesamtsystems in SIMULINK bis zur Echtzeitsimulation für<br />
den Einsatz im HIL-Prüfstand gewährleistet.<br />
Die aufgezählten Vorteile unterstreichen das Potential der realisierten Lösung für zukünftige Erweiterungen<br />
bzw. Weiterentwicklungen.