

Praktikum Grundlagen der Automatisierungstechnik I und II
Praktikum Grundlagen der Automatisierungstechnik I und II
Praktikum Grundlagen der Automatisierungstechnik I und II

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
mit Technologiemodell Spindelantrieb zum Einstieg in CoDeSys<br />
Das <strong>Praktikum</strong> basiert auf dem WAGO Busklemmensystem-IO–750 mit Ethernet-Controller 841.<br />
-> Handbuch Controller ETHERNET TCP/IP 750-841<br />
-> Schnellstartanleitung zum ETHERNET Feldbus-Controller 750-841<br />
-> Handbuch für SPS Programmierung mit CoDeSys 2.3.3.3<br />
1. Online-Zugang zum Controller 841 über Standard Ethernet<br />
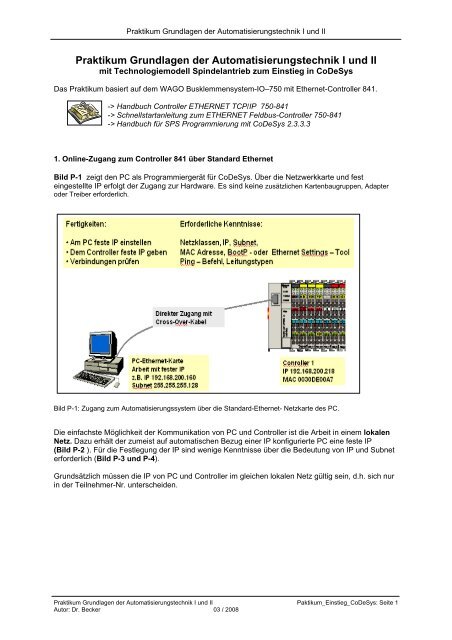
Bild P-1 zeigt den PC als Programmiergerät für CoDeSys. Über die Netzwerkkarte <strong>und</strong> fest<br />
eingestellte IP erfolgt <strong>der</strong> Zugang zur Hardware. Es sind keine zusätzlichen Kartenbaugruppen, Adapter<br />
o<strong>der</strong> Treiber erfor<strong>der</strong>lich.<br />
Bild P-1: Zugang zum Automatisierungssystem über die Standard-Ethernet- Netzkarte des PC.<br />
Die einfachste Möglichkeit <strong>der</strong> Kommunikation von PC <strong>und</strong> Controller ist die Arbeit in einem lokalen<br />
Netz. Dazu erhält <strong>der</strong> zumeist auf automatischen Bezug einer IP konfigurierte PC eine feste IP<br />
(Bild P-2 ). Für die Festlegung <strong>der</strong> IP sind wenige Kenntnisse über die Bedeutung von IP <strong>und</strong> Subnet<br />
erfor<strong>der</strong>lich (Bild P-3 <strong>und</strong> P-4).<br />
Gr<strong>und</strong>sätzlich müssen die IP von PC <strong>und</strong> Controller im gleichen lokalen Netz gültig sein, d.h. sich nur<br />
in <strong>der</strong> Teilnehmer-Nr. unterscheiden.<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 1<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
Bild P-2: Einstellung einer festen IP am PC als Programmiergerät<br />
Bild P-3 :Bedeutung <strong>der</strong> IP_Adressen Klasse C<br />
Bild P-4 : Bedeutung <strong>der</strong> Subnet Mask<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 2<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
Die Vergabe einer IP an einen Controller kann entwe<strong>der</strong> mit dem Tool WAGO-BootP-Server o<strong>der</strong> mit<br />
dem Tool Ethernet Settings erfolgen (-> www.wago.com).<br />
Der BootP-Server (Bild P-5 ) hat den Vorteil, dass die Vergabe <strong>der</strong> IP über das Netzwerkkabel<br />
erfolgen kann, während Ethernet Settings eine spezielle Leitung zur internen Schnittstelle des<br />
Controllers erfor<strong>der</strong>t. Diese Leitung ist kostenpflichtig <strong>und</strong> wird mit <strong>der</strong> Target-Software <strong>der</strong> Controller<br />
vertrieben.<br />
Beim Editieren des BootP-Servers wird <strong>der</strong> MAC-Adresse (48 Bit bzw. 12 Hex-Ziffern, siehe<br />
Controller) die gewünschte IP zugeordnet. Nach dem Start des Servers <strong>und</strong> Spannungsreset ist die<br />
Bild P-5: Bildschirm des BootP -Servers<br />
IP-Adresse eingetragen <strong>und</strong> <strong>der</strong> Online-Zugang kann mit dem Ping-Befehl (Bild P-6) geprüft werden.<br />
Für die dauerhafte Speicherung muss danach das BootP-Protokoll im Controller deaktiviert werden.<br />
Details hierzu siehe „Schnellstartanleitung zum ETHERNET Feldbus-Controller 750-841“.<br />
Bild P-6: Bildschirm zur Kontrolle des Online-Zugangs zum Controller mit dem Ping-Befehl<br />
links in <strong>der</strong> MS-DOS-Eingabeauffor<strong>der</strong>ung, rechts unter „Ausführen“ im Startmenu<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 3<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
Mit diesen Schritten ist die Kommunikation in lokalen Netzen einschließlich <strong>der</strong> Datenkommunikation<br />
zwischen unterschiedlichen Controllern nach Bild P-7 problemlos möglich.<br />
Bild P-7: Möglichkeiten <strong>der</strong> Kommunikation im lokalen Automatisierungsnetz über Standard<br />
Ethernet<br />
Zu beachten ist:<br />
Bei direkter Verbindung<br />
zweier Ethernet-Geräte:<br />
Cross Over Kabel verwenden!<br />
Bei Verbindung zweier<br />
Ethernet-Geräte über Hub<br />
o<strong>der</strong> Switch:<br />
1:1 Kabel verwenden!<br />
Bild P-8: Achtung bei <strong>der</strong> Auswahl <strong>der</strong> Datenleitungen: Cross Over o<strong>der</strong> Parallel-Kabel<br />
Zu kontrollieren sind:<br />
Gültige IP-Adresse!<br />
Port <strong>und</strong> Transportprotokoll<br />
unverän<strong>der</strong>t lassen<br />
Bild P-9: Einstellung des Ethernet-Kommunikationskanals im CoDeSys-Projekt<br />
(Menu: -> Online -> Kommunikationsparameter)<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 4<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
2. Automatisierungssystem <strong>und</strong> Technologiemodell<br />
P-10: Ansicht des Trainingsplatzes<br />
LED<br />
Anlage ein<br />
Ausschalter<br />
für 24V DC<br />
Switch für<br />
Vernetzung<br />
Taster<br />
Anlage ein<br />
Taster<br />
Anlage aus<br />
Bild P-11: Trainingsrack WAGO-I/O-750 mit Ethernet-Controller 841<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 5<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
Initiator zur Abtastung<br />
<strong>der</strong> Lochleiste<br />
Lochleiste<br />
Lichttaster 2 Impulse<br />
pro Umdrehung<br />
Initiator<br />
Endlage rechts<br />
Initiator<br />
Endlage links<br />
Absolutes Wegmeßsystem<br />
(Analogsignal)<br />
Umkehrantrieb<br />
mit Enco<strong>der</strong><br />
Bild P_12: Technologiemodell Spindelantrieb<br />
LED Verfahren<br />
nach links<br />
LED Verfahren<br />
nach rechts<br />
Taster<br />
Start<br />
LED Anlage<br />
eingschaltet<br />
Taster Verfahren<br />
nach links<br />
Taster Verfahren<br />
nach rechts<br />
Automatik<br />
Umschalter<br />
Handbetrieb<br />
Taster<br />
Anlage ein<br />
Taster<br />
Anlage aus<br />
Bild P-13: Steuerpult (links) <strong>und</strong> Befehlsgeber am Rack (rechts)<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 6<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
Signale des Trainingsplatzes:<br />
Signale an Eingangsklemmen<br />
Bez. Variable Adresse Bemerkungen<br />
Eintaster T_Ein %IX2.0 Taster mit Schliesserkontakt<br />
Austaster T_Aus %IX2.1 Taster mit Oeffnerkontakt<br />
Taster Verfahren nach links T_Linkslauf %IX2.2 Taster mit Schliesserkontakt<br />
Taster Verfahren nach rechts T_Rechtslauf %IX2.3 Taster mit Schliesserkontakt<br />
Taster Start T_Start %IX2.4 Taster mit Schliesserkontakt<br />
Initiator Endlage links INI_links %IX2.5 bei Anfahren Signal TRUE<br />
Initiator Endlage rechts INI_rechts %IX2.6 bei Anfahren Signal TRUE<br />
Initiator Lochleiste INI_Lochleiste %IX2.7 bei Locherfassung Signal FALSE<br />
Umschalter Hand / Automatik Hand_Auto %IX2.8 Rasten<strong>der</strong> Schalter: Knebelstellung<br />
nach oben: Automatik Signal TRUE<br />
nach unten: Handbetrieb Signal FALSE<br />
Lichttaster Drehimpuls Impulsgeber %IX 2.9 1 Impuls pro Umdrehung<br />
Analogsignal Lagegeber %IW0 DC 0..10V<br />
Signale an Ausgangsklemmen<br />
LED Anlage ein- / aus LED_Anl_Ein %QX0.0<br />
LED Verfahren nach links LED_links %QX0.1<br />
LED Verfahren nach rechts LED_rechts %QX0.2<br />
Antrieb Verfahren nach links Antr_links %QX0.3<br />
Antrieb Verfahren nach rechts Antr_rechts %QX0.4<br />
Schlitten<br />
Analoges absolutes Wegmeßsystem<br />
Initiator Lochleiste<br />
Lichttaster:<br />
2 Impulse pro<br />
Umdrehung<br />
Antrieb<br />
M<br />
Endlagenschalter<br />
Initiator<br />
Endlage links<br />
Initiator<br />
Endlage rechts<br />
Endlagenschalter<br />
Endlagenschalter sind direkt verdrahtete Sicherheits-Schalter<br />
<strong>und</strong> werden nicht in Programme einbezogen!<br />
Bild P-14: Technologieschema Spindelantrieb<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 7<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
3. Aufgaben:<br />
3.1. Vorübung: Steuerungsprogramm „Handsteuerung“<br />
In einer POE „Handsteuerung“ vom Typ Funktionsblock ist zu realisieren:<br />
• Die Anlage wird mit Taster „T_Ein“ ein- <strong>und</strong> mit Taster „T_Aus“ ausgeschaltet. Bei eingeschalteter<br />
Anlage leuchtet „LED_Anl_ein“ mit Dauerlicht.<br />
• Bei eingeschalteter Anlage <strong>und</strong> Stellung des Umschalter Hand / Automatik auf „Handbetrieb“ soll<br />
<strong>der</strong> Schlitten mit den Tastern „T_Linkslauf“ <strong>und</strong> „T_Rechtslauf“ im Tippbetrieb in beiden<br />
Richtungen verfahren werden. Beim Verfahren leuchten die entsprechenden „LED_links“ <strong>und</strong><br />
„LED_rechts“ mit Dauersignal.<br />
Die Initiatoren an beiden Endlagen müssen wirksam eingeb<strong>und</strong>en werden.<br />
• Die Taster für Rechts- <strong>und</strong> Linkslauf sind gegeneinan<strong>der</strong> zu verriegeln.<br />
Gr<strong>und</strong>sätzlich soll für jedes Umsteuern <strong>der</strong> Fahrtrichtung eine Zwangspause von 800 ms wirken.<br />
3.2 Vorübung: Steuerungsprogramm „Funktion_1“<br />
In einer POE „Funktion_1“ vom Typ Funktionsblock ist zu realisieren:<br />
• Die Anlage wird mit Taster „T_Ein“ ein- <strong>und</strong> mit Taster „T_Aus“ ausgeschaltet. Bei eingeschalteter<br />
Anlage leuchtet „LED_Anl_ein“ mit Dauerlicht. Gleichzeitig ist damit die Funktion_1 gewählt.<br />
• Bei für Funktion1 eingeschalteter Anlage <strong>und</strong> Stellung des Umschalters „Hand/Automatik“ auf<br />
„Automatik“ soll <strong>der</strong> Schlitten nach Betätigung des Tasters „T_Start“ aus je<strong>der</strong> Stellung heraus zur<br />
Endlage rechts verfahren.<br />
• Nach einer Wartezeit von 2s soll <strong>der</strong> Schlitten 12s zurückfahren.<br />
• Beim Verfahren leuchten die entsprechenden „LED_links“ <strong>und</strong> „LED_rechts“ mit Dauersignal.<br />
• Mit Betätigung des Taster „T_Aus“ wird jedes Verfahren sofort abgebrochen.<br />
3.3 Vorübung: Steuerungsprogramm „Funktion_2“<br />
In einer POE „Funktion_2“ vom Typ Funktionsblock ist zu realisieren:<br />
• Wenn Taster „T_Ein“ länger als 1s betätigt wird, wird Funktion_2 gewählt. Hierbei leuchtet<br />
LED_Anl_ein nicht mit Dauerlicht, son<strong>der</strong>n mit Blinklicht 1 Hz 1:1.<br />
• Bei für Funktion_2 eingeschalteter Anlage <strong>und</strong> Stellung des Umschalters „Hand/Automatik“ auf<br />
„Automatik“ soll <strong>der</strong> Schlitten nach Betätigung des Tasters „T_Start“ aus je<strong>der</strong> Stellung heraus zur<br />
Endlage rechts verfahren.<br />
• Nach einer Wartezeit von 2s erfolgt Linksfahrt. Diese wird jedoch nicht zeitgesteuert abgeschaltet,<br />
son<strong>der</strong>n beim dritten positiven Flankenwechsel des Signals „INI-Lochleiste“.<br />
Der positive Flankenwechsel an dieser Stelle <strong>der</strong><br />
Lochleiste stoppt das Verfahren des Schlittens<br />
Initiator<br />
Lochleiste<br />
• Beim Verfahren blinken die entsprechenden „LED_links“ <strong>und</strong> „LED_rechts“ mit Signal 1Hz 1:1.<br />
• Mit Betätigung des Taster „T_Aus“ wird jedes Verfahren sofort abgebrochen.<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 8<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
3.4 Programm „Spindelantrieb“<br />
Die beschriebenen Teilprogramme 3.1 bis 3.3 sind nach folgen<strong>der</strong> Struktur zu kombinieren:<br />
PLC_PRG<br />
Aufruf des FB<br />
Betriebsarten<br />
POE (FB)<br />
Betriebsarten<br />
Aufruf des FB<br />
Motorsteuerung<br />
POE (FB)<br />
Funktion_1<br />
Bedingter Aufruf des FB<br />
Funktion_1<br />
POE (FB)<br />
Funktion_2<br />
Bedingter Aufruf des FB<br />
Funktion_2<br />
POE (FB)<br />
Motorsteuerung<br />
• In <strong>der</strong> POE Betriebsarten sind zu realisieren:<br />
1. Einschalten <strong>der</strong> Anlage für Handsteuerung <strong>und</strong> alternativ mit Funktion_1 o<strong>der</strong><br />
Funktion_2<br />
2. Generieren <strong>der</strong> Blinksignale für die Meldeleuchten<br />
3. Funktion aller Meldleuchten<br />
• In <strong>der</strong> POE Funktion_1 sind die erfor<strong>der</strong>lichen Signale zu generieren, wie sie für das Verfahren<br />
des Schlittens nach Funktion_1 (nach Pkt 3.2.) erfor<strong>der</strong>lich sind. Die Signale werden in <strong>der</strong> POE<br />
Motorsteuerung weiterverarbeitet.<br />
• In <strong>der</strong> POE Funktion_2 sind die erfor<strong>der</strong>lichen Signale zu generieren, wie sie für das Verfahren<br />
des Schlittens nach Funktion_2 (nach Pkt. 3.3.)erfor<strong>der</strong>lich sind. Die Signale werden in <strong>der</strong> POE<br />
Motorsteuerung weiterverarbeitet.<br />
• In <strong>der</strong> POE Motorsteuerung sind zu realisieren:<br />
1. Generieren <strong>der</strong> Signale für Rechts- <strong>und</strong> Linkslauf des Antriebs<br />
2. Einbindung <strong>der</strong> Handsteuerung einschließlich Umschaltpause<br />
Hinweis: Bei <strong>der</strong> Realisierung dieser Struktur ist gr<strong>und</strong>sätzlich zu überlegen, welche Signale<br />
lokal <strong>und</strong> welche global zu deklarieren sind!<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 9<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
3.5 Programm „Spindelantrieb_Impulszählung“<br />
Das ursprüngliche Programm „Spindelantrieb“ ist mit einer weiteren POE „Funktion_3“ mit<br />
nachfolgen<strong>der</strong> Funktion zu ergänzen:<br />
• Funktion_3 wird unabhängig vom Eintaster aktiviert, wenn beide Taster „Verfahren nach links“ <strong>und</strong><br />
„Verfahren nach rechts“ gleichzeitig länger als 1s betätigt werden. Der Austaster behält seine<br />
Funktion. Bei Funktion_3 leuchtet LED_Anl_ein mit asymetrischem Blinklicht 1Hz 1:3. Die<br />
Handsteuerung soll in ihrer Wirkung auch bei Funktion_3 erhalten bleiben.<br />
• Die vom „Lichttaster Drehimpuls“ erzeugten Impulse sind zu zählen.<br />
• Nach Start soll <strong>der</strong> Schlitten in die Endstellung links verfahren. Dort ist <strong>der</strong> Zähler zu nullen<br />
(Referenzfahrt, Stellung am Initiator links bedeutet Position 0).<br />
• Nach erneuter Betätigung des Starttasters soll <strong>der</strong> Schlitten nach rechts in eine wählbare Position<br />
entsprechend vorzugegebener Impulszahlen zwischen 0 <strong>und</strong> max. Position verfahren.<br />
• Die Vorgabe <strong>der</strong> Position erfolgt am Eingabefeld (Keypad) einer Visualisierung mit Namen<br />
„Eingabe Sollposition“. Die maximale Position am Initiator rechts ist experimentell zu ermitteln.<br />
Die Visualisierung soll weiter enthalten die Anzeige <strong>der</strong> gewählten Sollposition <strong>und</strong> die Anzeige<br />
<strong>der</strong> Position (Beispiel Bild P-15).<br />
• Das Verfahren des Schlittens ist mit den beiden LED „Verfahren nach links“ sowie „Verfahren<br />
nach rechts“ mit asymetrischem Blinklicht (wie LED „Anlage ein/aus“) zumelden. Mit diesen LED<br />
ist auch die Visualisierung zu ergänzen!<br />
Zusatzaufgaben:<br />
• In einer weiteren POE „Lochpositionen“ vom Typ PROGRAM sollen die Positionen von Beginn<br />
<strong>und</strong> Ende <strong>der</strong> Bohrungen <strong>und</strong> Langlöcher durch Überfahren <strong>der</strong> Lochleiste von links nach rechts<br />
durch den Initiator Lochleiste ermittelt <strong>und</strong> in eine Liste eingetragen werden, wie in Bild P-16<br />
beispielhaft gezeigt. Am Referenzpunkt sind zuvor alle evtl. vorhandenen Werte <strong>der</strong> Liste mit Null<br />
zu überschreiben.<br />
Hinweis: Für das „Scannen“ <strong>der</strong> Lochleiste kann Funktion_3 verwendet werden. Sinnvoll<br />
kann auch die Handsteuerung sein, um den Eintrag in die Liste einfach <strong>und</strong> variabel testen<br />
zu können.<br />
• Abschließend soll mit den ermittelten Werten <strong>der</strong> Schlitten so positioniert werden, dass das<br />
größere Langloch mittig über dem Initiator Lochleiste steht.<br />
Endstellung des Schlittens<br />
Initiator<br />
Lochleiste<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 10<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
Bild P-15: Beispiel <strong>der</strong> Visualisierung<br />
rechts oben die Offline(!) Festlegung <strong>der</strong> Eingabe <strong>der</strong> Sollposition in einer Schaltfläche mit Keypad<br />
rechts unten die Online(!)-Eingabe am Keypad<br />
Langloch<br />
Bild P-16: Beispiel <strong>der</strong> Listeneinträge (Onlinesicht)<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 11<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
3.6 Parametrierbarer Funktionsblock<br />
In einer parametrierbaren POE vom Typ Funktionsblock soll folgen<strong>der</strong> allgemeiner Bewegungsablauf<br />
des Spindelantriebs realisiert werden:<br />
• Die Anlage wird mit Ein- bzw. Austaster ein- <strong>und</strong> ausgeschaltet. Zustand „Anlage ist eingeschaltet“<br />
wird gemeldet.<br />
• Bei eingeschalteter Anlage verfährt <strong>der</strong> Schlitten nach Start aus je<strong>der</strong> Position heraus in eine<br />
Endlage. Diese fungiert als Referenzpunkt Null des inkrementalen Vor-Rückwärts-Zählers für die<br />
Wegmessung durch Impulse des Lichttasters.<br />
Mit Vorgabe eines Typs des Bewegungsablauf wird festgelegt, in welche Richtung die Bewegung<br />
nach Start erfolgt <strong>und</strong> welche Endlage (rechts o<strong>der</strong> links) als Referenzpunkt angefahren wird.<br />
• Nach erneuter Betätigung des Starttasters verfährt <strong>der</strong> Schlitten von dort in eine erste wählbare<br />
Position.<br />
• Nach einer wählbaren Wartezeit verfährt er zurück in eine wählbare zweite <strong>und</strong> schließlich<br />
unverzögert wie<strong>der</strong>um vorwärts in eine wählbare dritte Position.<br />
Die parametrierbare POE soll dann für drei skizzierte Bewegungsabläufe instanziert werden. Für die<br />
wählbaren Parameter gelten nachfolgende Parametersätze:<br />
Parametersatz 1<br />
Typ: Start_rechts<br />
Position_1: 40 Inkremente<br />
Position_2: 20 Inkremente<br />
Position_3: 60 Inkremente<br />
Wartezeit: 2s<br />
Parametersatz 2<br />
Typ: Start_rechts<br />
Position_1: 20 Inkremente<br />
Position_2: 10 Inkremente<br />
Position_3: 30 Inkremente<br />
Wartezeit: 1s<br />
Parametersatz 3<br />
Typ: Start_links<br />
Position_1: 45 Inkremente<br />
Position_2: 25 Inkremente<br />
Position_3: 65 Inkremente<br />
Wartezeit: 1,6s<br />
2 s 1 s 1,6 s<br />
• Sämtliche auf Adressen zu legende Variablen sollen als globale Variablen deklariert werden.<br />
• Der Typ des Bewegungsablaufs soll durch eine Variable vom Typ STRING vorgegeben werden!<br />
• Die Auswahl des Bewegungsablaufs 1, 2 o<strong>der</strong> 3 kann durch Taster einer Visualisierung erfolgen,<br />
wie beispielhaft im Bild gezeigt.<br />
Hinweis: Für diese Aufgabe sollen Teillösungen von Programm <strong>und</strong> Visualisierung<br />
„Spindelantrieb_Impulszählung“ wie<strong>der</strong>verwendet werden.<br />
Es wird empfohlen, für evtl. Fehlerabstellung bei <strong>der</strong> Inbetriebnahme das Programm mit einer<br />
einfachsten Handsteuerung zu ergänzen.<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 12<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
3.7 Programm „Spindelantrieb_Analog“<br />
In einem von o.a. Aufgaben unabhängigen Programm „Spindelantrieb_Analog“ ist zu realisieren:<br />
• Die Anlage wird mit Taster „T_Ein“ ein- <strong>und</strong> mit Taster „T_Aus“ ausgeschaltet. Bei eingeschalteter<br />
Anlage leuchtet „LED_Anl_ein“ mit Dauerlicht. Die Handsteuerung ist wie in vorstehenden<br />
Aufgaben zu realisieren.<br />
• Der Schlitten ist mit Handsteuerung in beide Endlagen zu verfahren. Die dort von <strong>der</strong> analogen<br />
Eingangsbaugruppe eingelesenen Werte sind zu notieren.<br />
Der Verfahrweg des analogen Weggebers ist danach auf 0 ..500 Wegeinheiten (Datentyp Integer!)<br />
zu skalieren.Hierzu kann <strong>der</strong> Bibliotheksbaustein „Fu_linear-2punkt“ <strong>der</strong> WAGO Bibliothek<br />
„Gebauede_allgemein“ benutzt werden!)<br />
• Das Programm Spindelantrieb_Analog soll dann folgende Funktion realisieren:<br />
Nach Start positioniert sich <strong>der</strong> Schlitten aus je<strong>der</strong> Lage heraus in die Stellung 250 Wegeinheiten<br />
<strong>und</strong> schaltet dort die LED „Verfahren nach links“ zunächst mit 2 Hz blinkend ein.<br />
Nach einer Pause von 2s verfährt <strong>der</strong> Schlitten zur Stellung 150 Wegeinheiten. Die zugehörige<br />
LED leuchtet beim Verfahren mit Dauersignal <strong>und</strong> wird in Stellung 150 ausgeschaltet.<br />
Hinweis: Beachten Sie beim Anfahren von analogen Schaltpunkten Probleme <strong>der</strong> Toleranzen<br />
des analogen Wegmesssystems!<br />
• Erstellen Sie weiter ein Programm zum „Scannen“ <strong>der</strong> Lochleiste: Anfangs- <strong>und</strong> Endposition aller<br />
Bohrungen <strong>und</strong> Langlöcher sollen beim Überfahren des Inititors Lochleiste in analogen<br />
Wegeinheiten auf Basis <strong>der</strong> Skalierung 0 .. 500 in eine Liste eingetragen werden.<br />
Gewünschte Listeneinträge<br />
<strong>und</strong> weiter<br />
Endstellung des<br />
Schlittens<br />
Initiator<br />
Lochleiste<br />
Die Listeneinträge sollen sämtlich mit Null überschrieben werden, wenn Taster "T_Ein" länger als<br />
1s gedrückt wird.<br />
• Ergänzen Sie mit den gewonnenen Werten das Programm Spindelantrieb_Analog so, dass <strong>der</strong><br />
Schlitten aus <strong>der</strong> Stellung 150 Wegeinheiten heraus nach einer Umschaltpause von 500 ms<br />
solange verfährt, bis das Langloch mittig über dem Initiator Lochleiste steht.<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 13<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
3.8 Programm „Spindelantrieb_Ablauf“<br />
In einer POE „Spindelantrieb_ Ablauf“ ist in Ablaufsprache folgende Funktion des Spindelantriebs zu<br />
realisieren:<br />
• Bei Betätigung des Taster „T_Ein“ wird vom Initialschritt in einen Schritt_1 gewechselt.<br />
„LED_Anl_ein“ leuchtet mit Dauerlicht. Diese Meldung bleibt bei allen weiteren Schritten außer bei<br />
Warnungen bestehen.<br />
• Nach Betätigung des Tasters „T_Start“ verfährt <strong>der</strong> Schlitten nach einer Warnzeit von 2s aus je<strong>der</strong><br />
Position heraus zum Referenzpunkt „Endlage links“. Während <strong>der</strong> Warnzeit blinkt „LED_Anl_ein“<br />
mit Signal 2Hz 1:1.<br />
• Bei allen Bewegungen des Schlittens leuchten die entsprechenden „LED_links“ <strong>und</strong> „LED_rechts“<br />
mit Dauersignal. Abweichungen in nachfolgenden For<strong>der</strong>ungen sind zu berücksichtigen.<br />
• Der Schlitten verharrt 4s am Referenzpunkt <strong>und</strong> verfährt dann in Position 100 Inkremente (durch<br />
„Lichttaster Drehimpuls“ gezählt. Referenzpunkt bedeutet Null Inkremente).<br />
• Bei Signal TRUE des „Umschalter Hand / Automatik“ soll <strong>der</strong> Schlitten von hier aus<br />
3 Pendelbewegungen um jeweils 20 Inkremente - nach links beginnend - ausführen.<br />
Während <strong>der</strong> Pendelbewegungen blinken die entsprechenden „LED_links“ <strong>und</strong> „LED_rechts“<br />
mit Signal 1Hz 1:1.<br />
• Nach den Pendelbewegungen verfährt <strong>der</strong> Schlitten in die rechte Endlage.<br />
• Bei Signal FALSE des „Umschalter Hand / Automatik“ soll <strong>der</strong> Schlitten stattdessen auf den<br />
Analogwert von 500 Wegeinheiten verfahren. Hierzu ist <strong>der</strong> gesamte Verfahrweg auf<br />
1000 Wegeinheiten zu skalieren.<br />
Danach verfährt <strong>der</strong> Schlitten auf Position 200 Wegeinheiten, zurück zur Position 500 Wegeinheiten<br />
<strong>und</strong> dann zur Position Mitte Langloch.<br />
Bei allen Umschaltungen <strong>der</strong> Drehrichtung sind hier Umschaltpausen von 800ms notwendig.<br />
• In Mitte Langloch verharrt <strong>der</strong> Schlitten für 2s <strong>und</strong> verfährt dann in die rechte Endlage.<br />
• Danach soll es für 10s möglich sein, den Schlitten mit Handtaster „T_Linkslauf“ bzw.<br />
„T_Rechtslauf“ mit Zwangsumschaltpausen von jeweils 800ms zu verfahren.<br />
Nach Ablauf dieser Zeit wechselt das System in den Initialschritt.<br />
• Damit in <strong>der</strong> Inbetriebnahmephase <strong>und</strong> bei evtl. Programmfehlern das Durchlaufen <strong>der</strong><br />
Schrittkette je<strong>der</strong>zeit abgebrochen <strong>und</strong> in den Initialschritt gewechselt werden kann, ist die SFC-<br />
Variable SFCRESET:BOOL als Variable vom Typ VAR_INPUT in <strong>der</strong> POE <strong>der</strong> Ablaufsteuerung<br />
zu programmieren. Sie soll mit Wert TRUE aktiviert werden, wenn beide Taster „T_Linkslauf“ <strong>und</strong><br />
„T_Rechtslauf“ gleichzeitig betätigt werden.<br />
Hinweis: Verwenden Sie bei <strong>der</strong> Realisierung dieser Aufgabenstellung Programmdetails <strong>und</strong><br />
Werte aus vorangegangenen <strong>Praktikum</strong>saufgaben!<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 14<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
3.9 Vernetzung zweier Spindelantriebe<br />
Zwei Controller PFC 841 sind über Ethernet TCP/IP zu vernetzen. Controller 1 steuert als Master mit<br />
dem Programm “Ablaufsteuerung“ den Spindelantrieb 1.<br />
Der zweite Spindelantrieb an PFC 2 soll in gleicher Funktion einschließlich <strong>der</strong> LED-Meldungen<br />
mitlaufen.<br />
Da die Anfangsposition von Schlitten 2 nicht zwingend gleich <strong>der</strong> von Schlitten 1 ist, erhält die<br />
Referenzfahrt zur „Endlage links“ beson<strong>der</strong>e Bedeutung.<br />
Die Endlagen-Initiatoren von Antrieb 2 sind zwingend in das Slave-Programm einzubinden!<br />
Master<br />
LED_Anl_Ein<br />
LED_links<br />
LED_rechts<br />
Antr_links<br />
Antr_rechts<br />
Pos_Imp<br />
1 Wort Schreiben<br />
1 Wort Lesen<br />
Slave<br />
LED_Anl_Ein<br />
LED_links<br />
LED_rechts<br />
Antr_links<br />
Antr_rechts<br />
Pos_Imp<br />
Im Slaveprogramm ist ein Impulszähler für die Impulse des Lichttasters (Variable Impulsgeber)<br />
zu programmieren. Im Referenzpunkt ist <strong>der</strong> Zähler zu nullen. Der Zählerstand ist als Variable<br />
Pos_Imp zum Master zu übertragen <strong>und</strong> dort in einer Visualisierung anzuzeigen.<br />
Hinweis: Verwenden Sie bei <strong>der</strong> Realisierung dieser Aufgabenstellung Programmdetails <strong>und</strong><br />
Werte aus vorangegangenen <strong>Praktikum</strong>saufgaben!<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 15<br />
Autor: Dr. Becker 03 / 2008
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong><br />
3.10 Strukturierter Text<br />
Das geglie<strong>der</strong>te Programm Spindelantrieb mit nachfolgen<strong>der</strong> Struktur entsprechend Pkt.3.4 ist in die<br />
Programmiersprache ST zu überführen<br />
PLC_PRG<br />
Aufruf des FB<br />
Betriebsarten<br />
POE (FB)<br />
Betriebsarten<br />
Aufruf des FB<br />
Motorsteuerung<br />
POE (FB)<br />
Automatik1<br />
Bedingter Aufruf des FB<br />
Automatik1<br />
POE (FB)<br />
Automatik2<br />
Bedingter Aufruf des FB<br />
Automatik2<br />
POE (FB)<br />
Motorsteuerung<br />
<strong>Praktikum</strong> <strong>Gr<strong>und</strong>lagen</strong> <strong>der</strong> <strong>Automatisierungstechnik</strong> I <strong>und</strong> <strong>II</strong> Paktikum_Einstieg_CoDeSys: Seite 16<br />
Autor: Dr. Becker 03 / 2008


