Zubehör - Ersatzteile - Varstroj
Zubehör - Ersatzteile - Varstroj
Zubehör - Ersatzteile - Varstroj

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
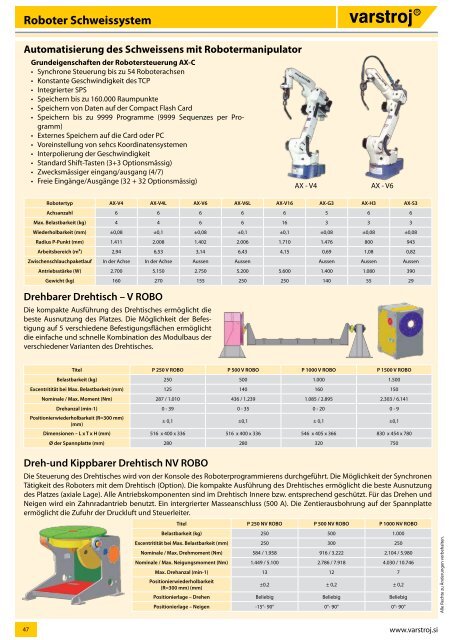
Roboter Schweissystem<br />
Automatisierung des Schweissens mit Robotermanipulator<br />
47<br />
Grundeigenschaften der Robotersteuerung AX-C<br />
• Synchrone Steuerung bis zu 54 Roboterachsen<br />
• Konstante Geschwindigkeit des TCP<br />
• Integrierter SPS<br />
• Speichern bis zu 160.000 Raumpunkte<br />
• Speichern von Daten auf der Compact Flash Card<br />
• Speichern bis zu 9999 Programme (9999 Sequenzes per Programm)<br />
• Externes Speichern auf die Card oder PC<br />
• Voreinstellung von sehcs Koordinatensystemen<br />
• Interpolierung der Geschwindigkeit<br />
• Standard Shift-Tasten (3+3 Optionsmässig)<br />
• Zwecksmässiger eingang/ausgang (4/7)<br />
• Freie Eingänge/Ausgänge (32 + 32 Optionsmässig)<br />
Drehbarer Drehtisch – V ROBO<br />
Die kompakte Ausführung des Drehtisches ermöglicht die<br />
beste Ausnutzung des Platzes. Die Möglichkeit der Befestigung<br />
auf 5 verschiedene Befestigungsflächen ermöglicht<br />
die einfache und schnelle Kombination des Modulbaus der<br />
verschiedener Varianten des Drehtisches.<br />
Titel P 250 V ROBO P 500 V ROBO P 1000 V ROBO P 1500 V ROBO<br />
Belastbarkeit (kg) 250 500 1.000 1.500<br />
Excentritität bei Max. Belastbarkeit (mm) 125 140 160 150<br />
Nominale / Max. Moment (Nm) 287 / 1.010 436 / 1.239 1.085 / 2.895 2.303 / 6.141<br />
Drehanzal (min-1) 0 - 39 0 - 35 0 - 20 0 - 9<br />
Positionierwiederholbarkeit (R=300 mm)<br />
(mm)<br />
± 0,1 ±0,1 ± 0,1 ±0,1<br />
Dimensionen – L x T x H (mm) 516 x 400 x 336 516 x 400 x 336 546 x 405 x 366 830 x 454 x 780<br />
Ø der Spannplatte (mm) 280 280 320 750<br />
Dreh-und Kippbarer Drehtisch NV ROBO<br />
AX - V4 AX - V6<br />
Robotertyp AX-V4 AX-V4L AX-V6 AX-V6L AX-V16 AX-G3 AX-H3 AX-S3<br />
Achsanzahl 6 6 6 6 6 5 6 6<br />
Max. Belastbarkeit (kg) 4 4 6 6 16 3 3 3<br />
Wiederholbarkeit (mm) ±0,08 ±0,1 ±0,08 ±0,1 ±0,1 ±0,08 ±0,08 ±0,08<br />
Radius P-Punkt (mm) 1.411 2.008 1.402 2.006 1.710 1.476 800 943<br />
Arbeitsbereich (m²) 2,94 6,53 3,14 6,43 4,15 0,69 1,08 0,82<br />
Zwischenschlauchpaketlauf In der Achse In der Achse Aussen Aussen Aussen Aussen Aussen<br />
Antriebsstärke (W) 2.700 5.150 2.750 5.200 5.600 1.400 1.080 390<br />
Gewicht (kg) 160 270 155 250 250 140 55 29<br />
Die Steuerung des Drehtisches wird von der Konsole des Roboterprogrammierens durchgeführt. Die Möglichkeit der Synchronen<br />
Tätigkeit des Roboters mit dem Drehtisch (Option). Die kompakte Ausführung des Drehtisches ermöglicht die beste Ausnutzung<br />
des Platzes (axiale Lage). Alle Antriebskomponenten sind im Drehtisch Innere bzw. entsprechend geschützt. Für das Drehen und<br />
Neigen wird ein Zahnradantrieb benutzt. Ein intergrierter Masseanschluss (500 A). Die Zentierausbohrung auf der Spannplatte<br />
ermöglicht die Zufuhr der Druckluft und Steuerleiter.<br />
Titel P 250 NV ROBO P 500 NV ROBO P 1000 NV ROBO<br />
Belastbarkeit (kg) 250 500 1.000<br />
Excentritität bei Max. Belastbarkeit (mm) 250 300 250<br />
Nominale / Max. Drehmoment (Nm) 584 / 1.958 916 / 3.222 2.104 / 5.980<br />
Nominale / Max. Neigungsmoment (Nm) 1.449 / 5.100 2.786 / 7.918 4.030 / 10.746<br />
Max. Drehanzal (min-1) 13 12 7<br />
Positionierwiederholbarkeit<br />
(R=300 mm) (mm)<br />
±0,2 ± 0,2 ± 0,2<br />
Positionierlage – Drehen Beliebig Beliebig Beliebig<br />
Positionierlage – Neigen -15°- 90° 0°- 90° 0°- 90°<br />
www.varstroj.si<br />
Alle Rechte zu Änderungen vorbehalten.