SACMI WHITEWARE - Sama
SACMI WHITEWARE - Sama
SACMI WHITEWARE - Sama

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
INNOVATIVE ISO-PRESSTECHNIK MIT<br />
ROBOTER-ARTIKELRANDBEARBEITUNG<br />
VON<br />
SAMA<br />
(<strong>SACMI</strong> <strong>WHITEWARE</strong>)<br />
Pressenotiz 29.11.2001<br />
Das Artikelrandbearbeiten und -verschwammen mittels frei programmierbarer Roboter wurde von SAMA bereits 1998 in die<br />
Porzellangeschirrindustrie eingeführt.<br />
Medard de Noblat in Limoges war Vorreiter für diese Technologie. Aufgrund der hohen Qualitätsansprüche an das<br />
sogenannte kulinarische Porzellan bei Medard de Noblat kam die Druckgusstechnik nicht zum Einsatz. Trotz beachtlicher<br />
Qualitätsverbesserungen, die das Druckgussverfahren bietet; sind gewisse Deformationen nach dem Brand nicht ganz<br />
auszuschließen. Isostatisch gepresste Artikel sind in diesem Punkt dem Druckgussartikel überlegen.<br />
Die Firma Hermes de Paris ist größter Abnehmer von Weißware bei Medard de Noblat. Um den hohen Qualitätsansprüchen<br />
dieses Kunden zu entsprechen, hat man sich für die Presstechnik von SAMA entschieden.<br />
Problematisch ist das Verputzen von unrunden, vieleckigen, rechteckigen und unregelmäßig gestalteten Artikeln. SAMA ist<br />
hier erstmalig den damals vollkommen neuen Weg gegangen und hat die 6 Freiheitsgrade der Robotertechnik genutzt. Um die<br />
Robotertechnik für diese Anwendung nutzen zu können war es notwendig eine spezielle Software zu entwickeln um das<br />
Programmieren für die Bearbeitung von unregelmäßig geformten Artikeln zu erleichtern. Bei Medard de Noblat hat sich diese
Technik zu einen festen Bestandteil in der Fertigungstechnologie entwickelt. Kürzlich wurde ein zweiter<br />
Universalputzroboter UPR 1 in Betrieb genommen.<br />
Bei Medard de Noblat ist diese Technik noch „Offline“, d.h. die Presslinge werden durch das Einlegen in eine<br />
Zentriervorrichtung manuell dem Universalputzrobot zugeführt. Bei der vor kurzen im Werk Rosenthal Rothbühl in Betrieb<br />
genommenen patentierten Großgeschirrpressenanlage LPP 1-45/UPR 3 mit drei Universalputzrobotern geschieht dies<br />
nun automatisch.<br />
Die horizontale Pressenanlage LPP 1-45/UPR 3 produziert das anspruchsvolle Programm von Rosenthal bis hin zu<br />
quadratischen, recheckigen und unregelmäßig geformten Artikel mit Abmessungen bis zu 500 mm Diagonalmaß und 150 mm<br />
Höhe (Rohmaße!). Die Presslinge verlassen die Presse über eine Austragsrutsche und werden einer Vorzentrierung zugeführt.<br />
Per Vakuumsauger werden sie den nachfolgenden Stationen „Gradbrechen“ und „Lageerkennung“ zugeführt. Zur<br />
Lageerkennung ist eine Digitalkamera installiert mit entsprechender Software und Interface zur Weiterleitung der ermittelten<br />
Koordinaten an den entsprechenden Putzroboter. Ein Drehtisch übernimmt den Transport der Artikel zum jeweiligen Roboter.<br />
Insgesamt befinden sich drei Roboter im Einsatz um die Nominal-Kapazität von ca. 350 bis 400 Artikel pro Stunde zu<br />
bewältigen. Jeder Roboter erledigt seine Aufgabe quasi „eigenverantwortlich“, d.h. jeder Roboter verfügt über eine<br />
Trockenbearbeitungsstation und zwei Nassbearbeitungsstationen. Nach der Bearbeitung legt jeder Roboter den fertig<br />
bearbeiteten Artikel zurück auf den Rundtisch. Abschließend werden die Artikel noch einer Fußpolierstation zugeführt und<br />
gestapelt.<br />
Aufgrund der hohen Flexibilität und Genauigkeit (+/- 0,1 mm) der Roboterputztechnik wurden bereits weitere Aufträge aus<br />
Portugal, Italien und USA hereingenommen.
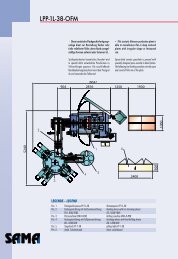
VERFAHRENSBESCHREIBUNG<br />
ISOSTATISCHE PRESSE LPP 1-45<br />
PRESSGRAT ENTFERNEN<br />
VIDEOLAGERKENNUNG<br />
PRÄZISIONSDREHTISCH<br />
3 x INDUSTRIE-ROBOTER<br />
PRÄZISIONSDREHTISCH<br />
FUSSPOLIEREN<br />
STAPELTISCH / STAPELBAND
6 Achsen sorgen für<br />
den notwendigen<br />
Bewegungsspielraum<br />
um je nach<br />
Artikelform die<br />
optimale<br />
Randbearbeitung zu<br />
gewährleisten.<br />
z.B.: bei vertikaler<br />
Bearbeitung gerät kein<br />
Staub und kein<br />
„Schlicker“ in den<br />
Artikel.
PATENTIERTES SYSTEM:<br />
•Jeder Robot komplettiert die Arbeit am Artikel ohne Weitergabe<br />
•Daher hohe Leistung und Präzision (+/- 0,1 mm)<br />
EIN ROBOT KANN „OFFLINE“ BENUTZT WERDEN<br />
UM:<br />
•Ein neues Programm zu erstellen – während dessen kann die Anlage automatisch mit zwei<br />
Robotern weiter produzieren<br />
•Einen anderen Artikel gleichzeitig „offline“ zu produzieren - während dessen kann die<br />
Anlage automatisch mit zwei Robotern weiter produzieren
EINFACHES PROGRAMMIEREN:<br />
Durch „Punkt zu Punkt Teach-In“ Verfahren direkt am „Offline“-Robot<br />
Optional: Durch Einlesen einer "Autocad-Datei" vom Werkzeug
RANDBEARBEITUNGSSYSTEM:<br />
Trockenschleifen mit<br />
Schleifband oder<br />
Schleifscheibe<br />
6-ASCHSEN<br />
INDUSTRIE-<br />
ROBOTER<br />
Verschwammeinheit<br />
mit gegenläufigen<br />
Schwammrollen<br />
Verschwammeinheit<br />
mit Schwammband<br />
oder Schwammrolle
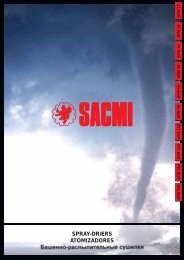
Großgeschirrpresse LPP 1-45 (Seitenansicht)
Großgeschirrpresse<br />
LPP 1-45<br />
Seitenansicht mit<br />
Werkzeug
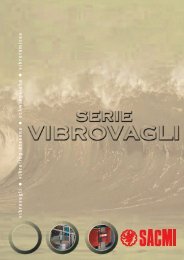
6-Achsen Industrieroboter mit Transporttisch und Bearbeitungsstationen
Trockenschleifen Nass verschwammen / feucht polieren
Lay-out der Grossgeschirrpresse LPP 1-45/UPR 3