3.3. Aspekte der Programmierung
3.3. Aspekte der Programmierung
3.3. Aspekte der Programmierung

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>3.3.</strong> <strong>Aspekte</strong> <strong>der</strong> <strong>Programmierung</strong><br />
<strong>3.3.</strong>1. Numerische Integration<br />
<strong>3.3.</strong> <strong>Aspekte</strong> <strong>der</strong> <strong>Programmierung</strong><br />
Im vorangegangen Kapitel haben wir gesehen, dass zur Berechnung <strong>der</strong> Elemensteifigkeitsmatrix<br />
und des Elementlastvektors die Formfunktionen und ihre Ableitungen elementweise<br />
zu integrieren sind. Diese Integration kann insbeson<strong>der</strong>e bei komplizierten Ansatzfunktionen<br />
auch numerisch erfolgen. Unter den numerischen Integrationsverfahren ist insbeson<strong>der</strong>e das<br />
���-Verfahren zu nennen, welches sich durch eine optimale Integrationsordnung auszeichnet<br />
(Exaktheit). Betrachten wir zunächst eine 1D-Integration<br />
� l<br />
f(x)dx,<br />
0<br />
z.B.fürf(x) = B T (x)EI(x)B(x),wiesiebei<strong>der</strong>BerechnungvonBalkenelementenauftritt.<br />
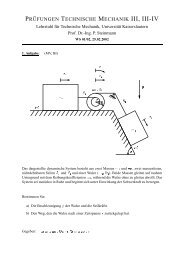
Es ist zweckmäßig das Integral über ein beliebiges Intervall x ∈ [x1,x2] auf ein Standardintervall,<br />
in <strong>der</strong> Regel ξ ∈ [−1,1] zu transformieren (siehe Abbildung 3.22).<br />
Damit gilt<br />
x<br />
x1<br />
x2<br />
ξ = −1 ξ ξ = 1<br />
l 2<br />
Abbildung 3.22.: Transformation auf ein Standardintervall<br />
x(ξ) = 1<br />
2 (1−ξ)x1 + 1<br />
2 (1+ξ)x2<br />
= x1 +x2<br />
+<br />
2<br />
x2 −x1<br />
ξ<br />
2<br />
Das Integral bezüglich x wird dadurch wie folgt transformiert:<br />
(3.57)<br />
� � x2 +1<br />
f(x)dx = f(x(ξ))<br />
x1 −1<br />
dx<br />
dξ , mit<br />
dξ<br />
� �� �<br />
g(ξ)<br />
dx<br />
dξ = x2 −x1<br />
=<br />
2<br />
l<br />
2<br />
(3.58)<br />
Durch diese Transformation ist es ausreichend, im Folgenden Integrationsformeln für<br />
� +1<br />
g(ξ)dξ<br />
−1<br />
anzugeben. Bei <strong>der</strong> numerischen Integration wird das Integral durch eine Summenformel<br />
angenähert, d.h.<br />
� +1 Pint �<br />
g(ξ)dξ ≈ g(ξp)wp, (3.59)<br />
−1<br />
p=1<br />
37
3. Finite-Elemente-Methode (FEM)<br />
g(ξ)<br />
−1 1<br />
Abbildung 3.23.: Trapezregel<br />
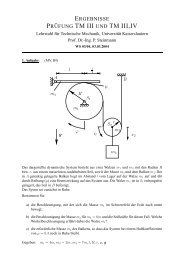
wobei ξp und wp die Pint Integrationspunkte, bzw. Integrationsgewichte darstellen. Als BeispielfüreinesolcheIntegrationsformel(keine��Ù�integration!)giltdieTrapezregel(Pint<br />
= 2),<br />
bei<strong>der</strong>einIntegralwertdurchdieFlächeeinesTrapezangenähertwird(sieheAbbildung3.23).<br />
In Formeln ausgedrückt bedeutet dies<br />
� +1<br />
g(ξ)dξ ≈ 1g(−1)+1g(1). (3.60)<br />
−1<br />
Diese Formel ist exakt für konstante und lineare Polynome.<br />
Als weiterer Vertreter <strong>der</strong> sogenannten Newton-Cotes-Formeln (bei dieser Klasse von Verfahren<br />
werden die Endpunkte bei <strong>der</strong> Integration berücksichtigt) sei noch die Simpson-Regel<br />
� +1<br />
−1<br />
g(ξ)dξ ≈ 1<br />
3<br />
g(−1)+ 4<br />
3<br />
1<br />
g(0)+ g(+1) (3.61)<br />
3<br />
erwähnt. Hiermit können die Integrale von Polynomen bis zum Grad 3 exakt berechnet werden.<br />
Als numerisch effizienter, bzw. optimal im Bezug auf die Anzahl <strong>der</strong> Integrationspunkte<br />
und Exaktheitsgrad gilt die schon erwähnte��Ù�-Integration (��Ù�-Quadratur), <strong>der</strong>en<br />
Integrationspunkte und Integrationsgewichte für (3.59) in Tabelle 3.2 dargestellt sind:<br />
38<br />
Pint ξp wp Exakt für Polynome<br />
bis Grad<br />
1 0 2 1<br />
2 − 1<br />
3<br />
√<br />
1<br />
, √<br />
� 3 �3 3 3 − , 0 5 5<br />
1,1<br />
5 8 5 , , 9 9 9<br />
3<br />
5<br />
Tabelle 3.2.:���-Quadratur<br />
ξ
Allgemein gilt für den Exaktheitsgrad<br />
<strong>3.3.</strong> <strong>Aspekte</strong> <strong>der</strong> <strong>Programmierung</strong><br />
m = 2Pint −1. (3.62)<br />
Für den�ÙÐ�Ö��ÖÒÓÙÐÐ�-Balken mit EI = const. und q = q0 = const. bedeutet das<br />
� +1<br />
ESM: B T � +1<br />
(ξ)EIB(ξ)dξ �= O(ξ)EIO(ξ)dξ<br />
ELV:<br />
−1<br />
→ Integrationsordnung: m = 2 → Pint = 2<br />
−1<br />
� +1<br />
N T � +1<br />
(ξ)q0dξ �= O(ξ 3 )q0dξ<br />
−1<br />
→ Integrationsordnung: m = 3 → Pint = 2<br />
Betrachten wir noch einmal denÌ�ÑÓ×��Ò�Ó-Balken aus (3.44)<br />
Π[w,β] = 1<br />
� l<br />
EIβ<br />
2 0<br />
′2 dx+ 1<br />
� l<br />
G<br />
2 0<br />
Ā(w′ −β) 2 � l<br />
dx− qw dx<br />
−1<br />
mit linearen Ansätzen für w und β und überlegen uns die notwendigen Anfor<strong>der</strong>ungen an<br />
eine Integrationsformel (���-Quadratur):<br />
1. Term:<br />
� l<br />
1<br />
EIβ<br />
2 0<br />
′2 dx<br />
Pint = 1 exakt für EI = const.<br />
2.Term:<br />
� l<br />
1<br />
G<br />
2 0<br />
Ā(w′ −β) 2 dx<br />
Pint = 2 exakt für GĀ = const.<br />
3.Term:<br />
� l<br />
qwdx<br />
0<br />
Pint = 1 exakt für q = const.<br />
0<br />
39
3. Finite-Elemente-Methode (FEM)<br />
Integriert man den 2. Term für die Schubdeformation mit nur einem Punkt, dann spricht<br />
man von einer Unterintegration. Diese Unterintegration liefert die gleiche Steifigkeitsmatrix<br />
wie die gemischte Formulierung, d.h. (3.56)<br />
⎡<br />
K e = K e MM + GĀ<br />
⎢<br />
le ⎢<br />
⎣<br />
le 1 2 −1 le<br />
2<br />
le<br />
2<br />
l2 e<br />
4 −le<br />
2<br />
l 2 e<br />
4<br />
−1 −le 1 − 2 le<br />
2<br />
le<br />
2<br />
l2 e<br />
4 −le<br />
2<br />
3.4. Finite Elemente Diskretisierung für partielle<br />
Differentialgleichungen<br />
3.4.1. Membrangleichung<br />
Die Membrangleichung stellt mechanisch eine inhomogeneÄ�ÔÐ��-Gleichung dar, die als ÈÓ�××ÓÒsche Differentialgleichung bezeichnet wird<br />
∆w = − p<br />
σ0t = −˜p mit ∆(·) = ∂2 (·)<br />
∂x2 + ∂2 (·)<br />
, (3.63)<br />
∂y2 l 2 e<br />
4<br />
⎤<br />
⎥<br />
⎥.<br />
⎥<br />
⎦<br />
wobei <strong>der</strong> Membran folgende Eigenschaften zugeordnet werden<br />
40<br />
• dünn<br />
• biegeschlaff<br />
• kleine Deformation in z−Richtung: w<br />
• häufig w| ∂B = 0 als Randbedingung.<br />
y<br />
σ0<br />
dx<br />
dy<br />
p(x,y)<br />
∂B<br />
B<br />
Abbildung 3.24.: Membran<br />
σ0<br />
x
3.4. Finite Elemente Diskretisierung für partielle Differentialgleichungen<br />
Zur Differentialgleichung (3.63) lässt sich folgendes Potential angeben:<br />
Π[w] = 1<br />
�<br />
(gradw)<br />
2<br />
2 �<br />
dA− ˜pwdA → min. (3.64)<br />
mit<br />
gradw =<br />
A<br />
� ∂w<br />
∂x<br />
∂w<br />
∂y<br />
� �<br />
w,x<br />
=<br />
w,y<br />
A<br />
�<br />
,.<br />
Die erste Variation von (3.64) liefert<br />
�<br />
δΠ[w] = (gradw·gradδw− ˜pδw)dA (3.65)<br />
B<br />
und mit partieller Integration erhalten wir<br />
�<br />
�<br />
δΠ[w] = (−divgradw − ˜p)δwdA+<br />
B<br />
Auf dem Rand gilt<br />
w| ∂B = 0 → δw| ∂B = 0<br />
für alle δw, so dass in B mit<br />
� �<br />
w,x<br />
div(gradw) = div = w,xx +w,yy = ∆w<br />
gilt<br />
w,y<br />
∂B<br />
gradw ·�nδwdA. (3.66)<br />
−∆w − ˜p = 0 bzw. ∆w = −˜p. (3.67)<br />
Für die FE-Formulierung gehen wir von <strong>der</strong> 1. Variation bzw. <strong>der</strong> schwachen Form aus<br />
�<br />
�<br />
δΠ = gradw ·gradδw dA− ˜pδw dA = 0. (3.68)<br />
B<br />
δB<br />
Dahierinnur1.Ableitungenauftreten,reichteinC 0 -stetigerAnsatzmitelementweiselinearen<br />
Ansätzen für w und δw aus. Das bedeutet, hier gilt<br />
w h =<br />
N�<br />
NI(�x)wI und δw h =<br />
I=1<br />
N�<br />
NI(�x)δwI, (3.69)<br />
I=1<br />
wobei auf die bisher verwendete Kennzeichnung e für elementweise definierte Größen verzichtet<br />
wird. Der Gradient von w h ist gegeben durch<br />
gradw h = ∂wh<br />
∂x ex + ∂wh<br />
∂y ey<br />
�<br />
h w,x =<br />
wh ,y<br />
� N�<br />
� �<br />
N,xI<br />
=<br />
I=1<br />
N,yI<br />
wI =<br />
N�<br />
I=1<br />
B IwI<br />
(3.70)<br />
41
3. Finite-Elemente-Methode (FEM)<br />
und<br />
gradδw h = ∂δwh<br />
∂x ex + ∂δwh<br />
∂y ey<br />
�<br />
h δw,x =<br />
δwh ,y<br />
�<br />
=<br />
N�<br />
I=1<br />
� N I<br />
,x<br />
N I<br />
,y<br />
�<br />
δwI =<br />
N�<br />
BIδwI (3.71)<br />
Bevor wir die Ansätze (3.69), (3.70) und (3.71) in (3.68) einsetzen, wollen wir (3.68) noch<br />
in einer Matrixdarstellung angeben. Mit<br />
gradw = � w,x w,y<br />
� T<br />
und gradδw = � δw,x δw,y<br />
lässt sich in (3.68) das Skalarprodukt umschreiben, so dass man<br />
�<br />
δΠ = (gradδw) T �<br />
gradw dA− ˜pδw dA = 0 (3.72)<br />
A<br />
A<br />
erhält. Einsetzen und Auswerten auf Elementebene Ae liefert für Ne Knoten pro Element<br />
�<br />
Ne �<br />
δwIB<br />
Be I=1<br />
T Ne �<br />
I<br />
J=1<br />
�<br />
BJwJ dA−<br />
Be<br />
� T<br />
I=1<br />
Ne �<br />
˜p δwINI dA. (3.73)<br />
I=1<br />
Ausklammern <strong>der</strong> virtuellen Verrückungen δwI liefert die Elementsteifigkeitsmatrix Ke IJ und<br />
den Elementlastvektor Fe I :<br />
⎧<br />
⎫<br />
Ne �<br />
I=1<br />
d.h. K e IJ =<br />
�<br />
und F e I =<br />
�<br />
⎪⎨ Ne �<br />
�<br />
δwI B<br />
Be ⎪⎩ J=1<br />
T<br />
IB J dA<br />
� �� �<br />
Be<br />
Be<br />
K e IJ<br />
B T<br />
I B J dA<br />
˜pNI dA.<br />
�<br />
⎪⎬<br />
˜pNI dA<br />
⎪⎭<br />
wJ −<br />
Be � �� �<br />
Fe I<br />
(3.74)<br />
Das anschließende Zusammenbau / Assemblierung des Gesamtgleichungssystems geschieht<br />
analog zum Vorgehen im eindimensionalen Zustand.<br />
42
3.5. Elementtechnologie<br />
3.5. Elementtechnologie<br />
In (3.74) sind die Ansatzfunktionen und damit die Elementformulierungen noch unbestimmt.<br />
Wir wollen dies nun etwas konkretisieren. Die am häufigsten eingesetzten Elemente (siehe<br />
Abbildung 3.25) sind<br />
- Dreiecke (linear),<br />
- Rechtecke (bilinear),<br />
- isoparametrische Elemente (quadratisch)<br />
Abbildung 3.25.: Dreieck-, Rechteck- und isoparametrisches Element<br />
Neben <strong>der</strong> Form werden Elementformulierungen auch nach <strong>der</strong> Art <strong>der</strong> Ansatzfunktion (Grad<br />
<strong>der</strong> Polynome) charakterisiert.<br />
Allgemein gilt für die Wahl <strong>der</strong> Ansatzfunktionen, dass<br />
NI(�xJ) = δIJ =<br />
woraus folgt, dass<br />
w h (�xI) = wI<br />
� 1 für I = J<br />
0 für I �= J<br />
, (3.75)<br />
(siehe Abbildung 3.26) und dass im Element keine Unstetigkeiten auftreten. Um unstetige<br />
Fel<strong>der</strong> zu berücksichtigen, muss auf die sogenannte eXtended FEM = XFEM zurückgegriffen<br />
werden.<br />
NI<br />
Abbildung 3.26.: Beispiel einer quadratischen Ansatzfunktion<br />
Außerdem muss die Funktion w h stetig an den Elementkanten sein. Um in (3.68) alle möglichen<br />
virtuellen Testfel<strong>der</strong> gradδw mit <strong>der</strong> diskreten Darstellung realisieren zu können, muss<br />
43
3. Finite-Elemente-Methode (FEM)<br />
<strong>der</strong> Ansatz für w und δw vollständig sein. Das bedeutet, dass für (3.68) alle Gradienten<br />
(lineare NI in x,y) darstellbar sein müssen, d.h.<br />
NI(�x) ∈ (1,x,y). (3.76)<br />
Diese Vollständigkeitsanfor<strong>der</strong>ung ist von <strong>der</strong> Problemstellung (Differentialgleichung und Potential)<br />
abhängig. Für das Membranelement reicht eine lineare Vollständigkeit aus. Die Berechnung<br />
(Konstruktion) <strong>der</strong> Formfunktionen kann nach dem folgenden Schema erfolgen<br />
w h (�x) = w h (x,y) = C0 +C1x+C2y +...<br />
⎡ ⎤<br />
= � 1 x y ... � ⎢<br />
⎣<br />
C0<br />
C1<br />
C2<br />
.<br />
⎥ = p(�x)C (3.77)<br />
⎦<br />
Aus For<strong>der</strong>ung (3.75) lassen sich nun Bedingungen für die Ansatzkoeffizienten C bestimmen,<br />
denn<br />
⎡ ⎤<br />
wI = � 1 xI yI ... � ⎢<br />
⎣<br />
C0<br />
C1<br />
C2<br />
.<br />
⎥<br />
⎥,<br />
(3.78)<br />
⎦<br />
wobei I die Knotennummer eines Elementknotens ist. Für alle Ne Knoten lässt sich daraus<br />
ein Gleichungssystem formulieren:<br />
⎡ ⎤<br />
w1<br />
⎢ ⎥<br />
⎢ w2 ⎥<br />
⎢ ⎥<br />
⎣ . ⎦ =<br />
⎡ ⎤⎡<br />
⎤<br />
1 x1 y1 ... C0<br />
⎢ 1 x2 y2 ... ⎥⎢<br />
⎥<br />
⎥⎢<br />
C1 ⎥<br />
⎢ ⎥⎢<br />
⎥,<br />
(3.79)<br />
⎣ . . . ⎦⎣<br />
. ⎦<br />
1 xNe<br />
yNe ...<br />
wNe<br />
welches sich kurz als<br />
CNe−1<br />
w = H C (3.80)<br />
schreiben lässt. Hierin bezeichnet man die Matrix H alsÎ�Ò��ÖÑÓÒ��matrix. Die Koeffizienten<br />
C erhält man durch Invertieren des Gleichungssystems (3.80) zu<br />
C = H −1 w. (3.81)<br />
Setzt man dies in (3.77) ein, so ergibt sich<br />
44<br />
w h (�x) =<br />
Ne �<br />
I=1<br />
NI(�x)wI = N(�x)w = p(�x)C = p(�x)H −1 w (3.82)<br />
❀ N(�x) = p(�x)H −1 . (3.83)
3.5.1. Dreieckselement<br />
3.5. Elementtechnologie<br />
Wir betrachten nun den einfachsten Fall eines ebenen Elements, das Dreieckselement mit<br />
drei Knoten. Für den Ansatz p(�x) wählen wir<br />
p(x,y) = � 1 x y � . (3.84)<br />
DieÎ�Ò��ÖÑÓÒ��matrix H ergibt sich aus den Knotenkoordinaten (xI,yI), I = 1,2,3<br />
zu<br />
⎡ ⎤<br />
1 x1 y1<br />
H = ⎣ 1 x2 y2 ⎦. (3.85)<br />
1 x3 y3<br />
Für den Ansatz w h ergibt sich dann<br />
mit<br />
N(x,y) = 1<br />
⎡<br />
b0 = ⎣<br />
2Ae<br />
x2y3 −x3y2<br />
x3y1 −x1y3<br />
x1y2 −x2y1<br />
� b T<br />
0 +b T<br />
1 x+b T<br />
2 y �<br />
⎤<br />
Für die Elementfläche Ae gilt<br />
⎡<br />
⎦, b1 = ⎣<br />
y2 −y3<br />
y3 −y1<br />
y1 −y2<br />
⎤<br />
⎡<br />
⎦, b2 = ⎣<br />
x3 −x2<br />
x1 −x3<br />
x2 −x1<br />
⎤<br />
(3.86)<br />
⎦ (3.87)<br />
Ae = 1<br />
detH. (3.88)<br />
2<br />
Für die Ableitungen <strong>der</strong> Formfunktionen erhält man somit<br />
∂N<br />
∂x<br />
1<br />
= b<br />
2Ae<br />
T<br />
1<br />
und ∂N<br />
∂y<br />
d.h. die B-Matrix in (3.74) wird zu<br />
� � � �<br />
NI,x N,x<br />
B = [BI] = =<br />
NI,y<br />
1<br />
= b<br />
2Ae<br />
T<br />
2 , (3.89)<br />
N ,y<br />
= 1<br />
2Ae<br />
� b T<br />
1<br />
b T<br />
2<br />
�<br />
. (3.90)<br />
Hiermit lassen sich die Elementsteifigkeitsmatrix K e und <strong>der</strong> Elementlastvektor F e für ein<br />
Membranelement angeben. Unter <strong>der</strong> Annahme, dass ˜p(�x) = const. ist und mit <strong>der</strong> Feststellung,<br />
dass B = const. im Element ist, ergibt sich aus (3.74)<br />
K e IJ =<br />
F e I =<br />
�<br />
�<br />
Be<br />
Be<br />
B T<br />
I B J dA −→ K e =<br />
NI˜p dA −→ F e �<br />
=<br />
Be<br />
�<br />
Be<br />
B T BdA = 1<br />
N T ˜pdA = ˜pAe<br />
3<br />
4Ae<br />
⎡<br />
1<br />
⎣ 1<br />
1<br />
�<br />
b1b T<br />
1 +b2b T�<br />
2<br />
⎤<br />
(3.91)<br />
⎦ (3.92)<br />
45
3. Finite-Elemente-Methode (FEM)<br />
3.5.2. Isoparametrisches Konzept<br />
Um auch gekrümmte Elementrän<strong>der</strong> abbilden zu können, verfolgen wir das isoparametrische<br />
Konzept, bei dem eine identische Approximation für Feldgrößen und Elementgeometrie<br />
gemacht wird. Dies drückt sich durch den Ansatz<br />
w h =<br />
�x =<br />
N�<br />
NI( � ξ)wI<br />
I=1<br />
N�<br />
NI( � ξ)xI I=1<br />
y<br />
1<br />
x<br />
4<br />
2<br />
η<br />
ξ<br />
3<br />
Abbildung 3.27.: Das isoparametrische Konzept<br />
4<br />
1<br />
η<br />
3<br />
2<br />
ξ<br />
(3.93)<br />
(3.94)<br />
aus und wir erhalten eine Koordinatentransformation, wie sie in Abbildung 3.27 skizziert ist.<br />
Es treten folgende Größen auf<br />
� �<br />
�ξ<br />
ξ<br />
= lokale (elementeigene) bzw. konvektive (eingeritzte) Koordinaten<br />
η<br />
�x =<br />
� x<br />
y<br />
�<br />
physikalische Koordinaten (Formulierung des Randwertproblems).<br />
Es gelten dieBeziehungen für eine Abbildung zweier Koordinatensysteme�x und � ξ. Wir stellen<br />
folgende For<strong>der</strong>ungen an diese Abbildung:<br />
Sie sollte eindeutig und umkehrbar sein, d.h. Ae(�x) ←→ �( � ξ).<br />
Damit darf dieÂ��Ó��determinante J nicht verschwinden. Durch die For<strong>der</strong>ung J ≥ 0 wird<br />
<strong>der</strong> Umlaufsinn <strong>der</strong> Knoten festgelegt, wie in Abbildung 3.28 dargestellt.<br />
J = det<br />
� ∂x<br />
∂ξ<br />
∂y<br />
∂ξ<br />
∂x<br />
∂η<br />
∂y<br />
∂η<br />
�<br />
> 0 (3.95)<br />
Für ein 4-Knotenelement können wir die Ansatzfunktion im lokalen Koordinatensystem in<br />
46
4<br />
3<br />
3 4<br />
2 3<br />
1 2 1 2 1 4<br />
J > 0 J < 0 J < 0<br />
Abbildung 3.28.: Jakobideterminanten für verschiedene Elemente<br />
3.5. Elementtechnologie<br />
(ξ,η) leicht angeben. Für kompliziertere Elementgeometrien kann auf das schon bekannte<br />
Verfahren <strong>der</strong>Î�Ò��ÖÑÓÒ��matrix zurückgegriffen werden.<br />
NI(ξ,η) = 1<br />
4 (1+ξξI)(1+ηηI), (3.96)<br />
wobei ξI,ηI die Knotenkoordinaten vom Knoten I im lokalen Koordinatensystem in (ξ,η)<br />
sind. Ausgeschrieben für das Element aus Abbildung 3.27 lautet dies<br />
N1 = 1<br />
4 (1−ξ)(1−η)<br />
N2 = 1<br />
4 (1+ξ)(1−η)<br />
N3 = 1<br />
4 (1+ξ)(1+η)<br />
N4 = 1<br />
4 (1−ξ)(1+η)<br />
(3.97)<br />
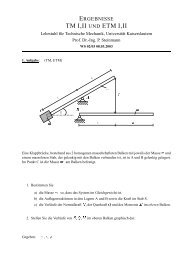
In Abbildung 3.29 ist die Formfunktion N1 aus (3.97) über einem 4-Knotenelement aufgetragen.<br />
N1<br />
1<br />
4<br />
2<br />
η<br />
3<br />
ξ<br />
Abbildung 3.29.: Formfunktionen für ein 4-Knoten-Element<br />
Wir wollen nun die Vollständigkeit des isoparametrischen Konzepts überprüfen, d.h. wir for-<br />
47
3. Finite-Elemente-Methode (FEM)<br />
<strong>der</strong>n<br />
w h = a0 +a1x+a2y<br />
wI = a0 +a1xI +a2yI<br />
und w h = �<br />
NIwI = �<br />
NI(a0 +a1xI +a2yI)<br />
I<br />
= �<br />
NIa0 + �<br />
NIxIa1 + �<br />
I<br />
I<br />
I<br />
I<br />
NIyIa2<br />
!<br />
= a0 +a1x+a2y (3.98)<br />
Aus Vergleich <strong>der</strong> letzten beiden Zeilen erhält man die Bedingungen<br />
1. �<br />
I NI = 1<br />
2. �<br />
I NIxI = x bzw. �<br />
I NIyI = y.<br />
Die zweite For<strong>der</strong>ung wird automatisch durch das isoparametrische Konzept erfüllt (vgl.<br />
(3.94)). Zur Überprüfung <strong>der</strong> ersten Bedingung betrachten wir das 4-Knotenelement:<br />
N1 +N2 = 1<br />
2 (1−η)<br />
N3 +N4 = 1<br />
2 (1+η)<br />
⎫<br />
⎪⎬<br />
⇒ N1 +N2 +N3 +N4 = 1 (3.99)<br />
⎪⎭<br />
DieStetigkeitsanfor<strong>der</strong>ungen (stetig imElementundandenElementkanten) werden ebenfalls<br />
vom isoparametrischen Konzept erfüllt.<br />
Zur Berechnung <strong>der</strong> Gradienten von wh werden die Ableitungen <strong>der</strong> Formfunktionen nach<br />
den physikalischen Kopordinaten x und y benötigt.<br />
gradw h � �<br />
h w,x = = �<br />
� �<br />
NI,x<br />
wI = � BIwI (3.100)<br />
w h ,y<br />
I<br />
NI,y<br />
Da die Ansatzfunktionen nicht direkt als Funktionen von x und y vorliegen, gehen wir zur<br />
Berechnung <strong>der</strong> Ableitungen wie folgt vor:<br />
∂NI<br />
∂ξ<br />
∂NI<br />
∂η<br />
= ∂NI<br />
∂x<br />
= ∂NI<br />
∂x<br />
∂x ∂NI ∂y<br />
+<br />
∂ξ ∂y ∂ξ<br />
∂x ∂NI ∂y<br />
+<br />
∂η ∂y ∂η<br />
Diese Beziehungen lassen sich als Matrixoperationen beschreiben:<br />
� � � ��<br />
�<br />
NI,ξ x,ξ y,ξ NI,x<br />
= ,<br />
NI,η x,η y,η NI,y<br />
� �� �<br />
J<br />
48<br />
(3.101)
3.5. Elementtechnologie<br />
wobei sich die Berechnung von J aus dem isoparametrischen Konzept herleiten lässt:<br />
x = �<br />
I NIxI ❀ x,ξ = �<br />
I NI,ξxI, x,η = �<br />
I NI,ηxI<br />
y = �<br />
I NIyI ❀ y,ξ = �<br />
I NI,ξyI, y,η = �<br />
I NI,ηyI<br />
Damit sind die Einträge in J berechenbar und die Inversion ergibt die gesuchten Ableitungen<br />
<strong>der</strong> Formfunktionen nach x bzw y.<br />
� �<br />
NI,x<br />
BI = =<br />
NI,y<br />
1<br />
� ��<br />
�<br />
y,η −y,ξ NI,ξ<br />
(3.102)<br />
det J −x,η x,ξ NI,η<br />
� �� �<br />
f(ξ,η)<br />
Es sei angemerkt, dass durch det J die Funktion f(ξ,η)im Allgemeinen kein Polynomin ξ,η<br />
darstellt, son<strong>der</strong>n eine gebrochen rationale Funktion, die in <strong>der</strong> Regel numerisch integriert<br />
werden muss. Dazu bereiten wir das Integral in (3.74) geeignet auf.<br />
K e �<br />
IJ = B<br />
Be<br />
T � +1�<br />
+1<br />
IB J dA = B<br />
−1 −1<br />
T I( � ξ)BJ( � ξ)det J dξdη (3.103)<br />
� �� �<br />
g(ξ,η)<br />
Um (3.103) numerisch zu integrieren, verwenden wir wie<strong>der</strong> eine���-Quadratur.<br />
Für die��Ù�-Quadratur im Einheitsquadrat � stellen wir hier nur tabellarisch die Quadraturformeln<br />
zusammen:<br />
� 1 � 1 Pint �<br />
g(ξ,η)dξdη = g(ξp,ηp)wp<br />
−1<br />
−1<br />
p=1<br />
Die Gewichte sind gegeben durch (vgl. mit Tabelle aus P. Wriggers, Anhang A)<br />
3.5.3.�����- und<br />
3.5.3.1.�����-Elemente<br />
Pint ξp,ηp wp Exaktheitsgrad<br />
1 0,0 4 1<br />
1 3<br />
2×2 ± 1<br />
√ 3 , ± 1<br />
√ 3<br />
.<br />
.<br />
Tabelle <strong>3.3.</strong>: 2-dimensionale���-Quadratur<br />
Serendipity-Elemente<br />
Die obige Skizze in Abbildung 3.30 zeigt�����-Elemente mit 4, 9 bzw. 16 Knoten. Bei<br />
�����-Elementenwerden dieFormfunktionen inFormvonProdukten von�����-<br />
Polynomen gebildet, d.h.<br />
.<br />
NI(ξ,η) = LI(ξ)LI(η), (3.104)<br />
.<br />
49
3. Finite-Elemente-Methode (FEM)<br />
η<br />
ξ<br />
η<br />
Abbildung 3.30.: Übersicht über die erstenÄ��Ö�Ò��-Elemente<br />
1<br />
1<br />
1<br />
1 3 2<br />
ξ<br />
L1(ξ)<br />
L2(ξ)<br />
L3(ξ)<br />
Abbildung 3.31.: Lagrange-Polynome zweiter Ordnung<br />
wobeiLI(ξ)ein1-dimensionalesÄ��Ö�Ò��-Polynomdarstellt.BeispielhaftsindÄ��Ö�Ò��-<br />
Polynome 2. Ordnung in Abbildung 3.31 dargestellt.<br />
Die Polynome LI lassen sich wie folgt konstruieren. Für Knoten I wird ein Polynom N-ter<br />
Ordnung PI aufgestellt<br />
PI(ξ) = (ξ −ξ1)(ξ −ξ2)...(ξ −ξI−1)(ξ −ξI+1)...(ξ −ξN)<br />
o<strong>der</strong> in kurzer Schreibweise<br />
N�<br />
PI(ξ) = (ξ −ξJ). (3.105)<br />
J=1,I�=J<br />
Um zu erreichen, dass NI = 1 an <strong>der</strong> Stelle ξ I erfüllt wird, müssen die LI(ξ) mittels<br />
50<br />
LI(ξ) = PI(ξ)<br />
PI(ξI)<br />
η<br />
ξ<br />
(3.106)
3.5. Elementtechnologie<br />
normiert werden. Dies sind die�����-Polynome. Betrachten wir noch folgendes Beispiel<br />
mit 3 Knoten aus Abbildung 3.32:<br />
2<br />
1 3 2<br />
P1(ξ) = (ξ −ξ2)(ξ −ξ3) = ξ(ξ −1)<br />
P2(ξ) = (ξ −ξ1)(ξ −ξ3) = ξ(ξ +1)<br />
Abbildung 3.32.: Beispiel mit 3 Knoten<br />
P3(ξ) = (ξ −ξ1)(ξ −ξ2) = (ξ +1)(ξ −1)<br />
❀ P1(ξ1) = 2; P2(ξ2) = 2; P3(ξ3) = −1.<br />
Dadurch erhält man dieÄ��Ö�Ò��-Polynome<br />
L1(ξ) = 1<br />
2 ξ(ξ −1); L2(ξ) = 1<br />
2 ξ(ξ +1); L3(ξ) = (1−ξ)(1+ξ).<br />
Als weiteres Beispiel betrachten wir das 9-Knoten-Element aus Abbildung 3.33.<br />
N1<br />
1<br />
8<br />
4<br />
9<br />
5 2<br />
7 3<br />
Abbildung 3.33.: 9-Knoten-Lagrange-Element<br />
Für die Formfunktion N1 erhalten wir nach (3.104) den Ausdruck<br />
N1(ξ,η) = L1(ξ)L1(η) = 1<br />
ξη(ξ −1)(η−1)<br />
4<br />
Zusammenfassend lassen sich die Formfunktionen wie folgt darstellen:<br />
NI = 1<br />
4 ξη(ξ −ξI)(η +ηI) für I = 1,2,3,4<br />
NI = 1<br />
2 (1−ξ2 )η(η+ηI) für I = 5,7<br />
NI = 1<br />
2 (1−η2 )ξ(ξ +ξI) für I = 6,8<br />
NI = (1−ξ 2 )(1−η 2 ) für I = 9<br />
6<br />
(3.107)<br />
51
3. Finite-Elemente-Methode (FEM)<br />
Es kann leicht nachgerechnet werden, dass �<br />
I NI = 1 und aufgrund des isoparametrischen<br />
Konzeptes gilt die Vollständigkeit das Ansatzes.<br />
Betrachtet man die vorkommenden Polynome in ξ und η und ordnet diese in folgende Form<br />
(��Вsches Dreieck)<br />
1<br />
ξ η<br />
ξ 2 ξη η 2<br />
ξ 2 η η 2 ξ<br />
ξ 2 η 2<br />
(3.108)<br />
an, so stellt man fest, dass bis zur 2. Ordnung alle Polynombasen komplett enthalten sind.<br />
Ein Vorteil des 9-Knotenelementes im isoparametrischen Konzept liegt in <strong>der</strong> quadratischen<br />
Interpolation <strong>der</strong> Feldgrößen und <strong>der</strong> Geometrie. Damit können parabelförmige Rän<strong>der</strong> abgebildet<br />
werden. Dies unterstreicht den im Allgemeinen nichtlinearen Charakter <strong>der</strong> isoparametrischen<br />
Abbildung. Die Gestalt des 9-Knotenelements hat Einfluss auf die Vollständigkeit<br />
<strong>der</strong> Approximation in (x,y). Dies ist hier tabellarisch zusammengestellt:<br />
52<br />
1. rechteckiges 9-Knotenelement<br />
η<br />
ξ<br />
Abbildung 3.34.: Rechteckiges 9-Knotenelement<br />
y<br />
1<br />
ξ η<br />
ξ 2 ξη η 2<br />
x<br />
vollständig bis 2. Ordnung
2. gerade Rän<strong>der</strong><br />
3. allgemeine Lage<br />
η<br />
ξ<br />
Abbildung 3.35.: 9-Knotenelement mit geraden Rän<strong>der</strong>n<br />
η<br />
y<br />
x<br />
1<br />
ξ η<br />
ξ 2 ξη η 2<br />
vollständig bis 2. Ordnung<br />
ξ<br />
Abbildung 3.36.: 9-Knotenelement mit gekrümmten Rän<strong>der</strong>n<br />
y<br />
1<br />
ξ η<br />
x<br />
vollständig bis 1. Ordnung<br />
3.5. Elementtechnologie<br />
53
3. Finite-Elemente-Methode (FEM)<br />
3.5.3.2. Serendipity-Elemente<br />
η<br />
ξ<br />
η<br />
Abbildung 3.37.: Übersicht über die ersten Serendipity-Elemente<br />
Eine weitere wichtige Klasse stellen die sogenannten Serendipity-Elemente dar. Im Gegensatz<br />
zu den�����-Elementen fehlen bei den Serendipity-Elementen die inneren Knoten<br />
(siehe Abbildung 3.37). Im Falle des 4-Knoten-Elements fallen�����- und Serendipity-<br />
Element zusammen. Die Vollständigkeit des Ansatzes für das 8-Knoten-Serendipity-Element<br />
ist wie<strong>der</strong> tabellarisch aufgetragen:<br />
54<br />
1. rechteckiges 8-Knoten-Element<br />
η<br />
ξ<br />
Abbildung 3.38.: Rechteckiges 8-Knotenelement<br />
y<br />
ξ<br />
1<br />
ξ η<br />
ξ 2 ξη η 2<br />
x<br />
vollständig bis 2. Ordnung<br />
η<br />
ξ
2. gerade Rän<strong>der</strong><br />
3. allgemeine Lage<br />
η<br />
ξ<br />
Abbildung 3.39.: 8-Knotenelement mit geraden Rän<strong>der</strong>n<br />
η<br />
y<br />
1<br />
ξ η<br />
x<br />
vollständig bis 1. Ordnung<br />
ξ<br />
Abbildung 3.40.: 8-Knotenelement mit gekrümmten Rän<strong>der</strong>n<br />
y<br />
1<br />
ξ η<br />
x<br />
vollständig bis 1. Ordnung<br />
3.5. Elementtechnologie<br />
55
3. Finite-Elemente-Methode (FEM)<br />
Die Ansatzfunktionen für das 8-knotige Serendipity-Element lauten<br />
56<br />
N1 = − 1<br />
(1−ξ)(1−η)(1+ξ +η)<br />
4<br />
N2 = − 1<br />
(1+ξ)(1−η)(1−ξ +η)<br />
4<br />
N3 = − 1<br />
(1+ξ)(1+η)(1−ξ −η)<br />
4<br />
N4 = − 1<br />
(1−ξ)(1+η)(1+ξ −η)<br />
4<br />
N5 = 1<br />
2 (1−ξ2 )(1−η)<br />
N6 = 1<br />
2 (1+ξ)(1−η2 )<br />
N7 = 1<br />
2 (1−ξ2 )(1+η)<br />
N8 = 1<br />
2 (1−ξ)(1−η2 )<br />
(3.109)
3.5.4. Zusammenstellung <strong>der</strong> Standard-Elemente<br />
1. Dreieck-Elemente<br />
2.�����-Elemente<br />
3. Serendipity-Elemente<br />
Die verschiedenen Ansatzbasissysteme in ξ,η finden sich in Anhang B.<br />
3.5.5. Übergangselemente<br />
3.5. Elementtechnologie<br />
Oft möchte man höherwertige Elemente dort einsetzen, wo starke Fluktuationen in den Feldgrößen<br />
erwartet werden o<strong>der</strong> wo gekrümmte Rän<strong>der</strong> auftreten. Im übrigen Bereich sollen<br />
hingegen einfache Elemente zum Einsatz kommen. Um diese beiden Diskretisierungen kompatibel<br />
miteinan<strong>der</strong> zu verbinden, werden (häufig)Übergangselemente eingesetzt. Einesolche<br />
Verbindung ist in Abbildung 3.41 dargestellt. Damit müssen Elemente zur Verfügung gestellt<br />
werden, die einen stetigen Übergang zwischen unterschiedlichen Elementtypen realisieren.<br />
Zum Beispiel kann ein 5-Knoten-Übergangselement (siehe Abbildung 3.42) durch folgendes<br />
Vorgehen konstruiert werden:<br />
1. Bilineares 4-Knoten-Element<br />
Wie bei den�����-Elementen entwickelt, sind die mit Formfunktionen gegeben<br />
durch<br />
ˆNI = 1<br />
4 (1+ξIξ)(1+ηIη), (3.110)<br />
57
3. Finite-Elemente-Methode (FEM)<br />
58<br />
höherwertige 9-Knoten-Elemente<br />
Übergangselemente<br />
einfache 4-Knoten-Elemente<br />
Abbildung 3.41.: Beipiel für die Verwendung von Übergangselementen<br />
Abbildung 3.42.: 5-Knoten-Übergangselement<br />
wobei ˆ N1 und ˆ N2 am Knoten 5 die Bedingung ˆ NI( � ξJ) = δIJ verletzen, da<br />
.<br />
ˆN1( � ξ5) = ˆ N2( � ξ5) = 1<br />
2 .<br />
2. Ansatzfunktion N5<br />
DieFormfunktion N5 wirdsoberechnet, dassN5( � ξ)andenKnoten1bis4verschwindet<br />
(siehe Abbildung 3.43).<br />
Daraus ergibt sich<br />
N5 = 1<br />
2 (1−ξ2 )(1−η). (3.111)<br />
Man erkennt leicht, dass für (3.111) tatsächlich N5( � ξJ) = δ5J für J = 1...5 gilt.
N5<br />
Abbildung 3.43.: zu Schritt 2<br />
η<br />
ξ<br />
3.5. Elementtechnologie<br />
3. Korrektur von ˆ N1 und ˆ N2<br />
Die Korrektur muss so erfolgen, dass die Bedingung NI( � ξJ) = δIJ im Element erfüllt<br />
wird (siehe Abbildung 3.44).<br />
Man erhält<br />
N1<br />
Abbildung 3.44.: zu Schritt 3<br />
N1 = ˆ N1 − 1<br />
2 N5, da ˆ N1( � ξ5) = 1<br />
2 ,<br />
N2 = ˆ N2 − 1<br />
2 N5, da ˆ N2( � ξ5) = 1<br />
2 .<br />
η<br />
ξ<br />
(3.112)<br />
Das oben beschriebene Verfahren lässt sich an an<strong>der</strong>en Elementkanten wie<strong>der</strong>holen und<br />
eignet sich zum hierarchischen Aufbau <strong>der</strong> Formfunktionen zur Generierung von 8-Knoten-<br />
Serendipity- o<strong>der</strong> 9-Knoten-�����-Elementen aus einem bilinearen Element.<br />
59
3. Finite-Elemente-Methode (FEM)<br />
60