DI Günter Wessner Ingenieurprojekt: Entwicklung ... - HTL Hollabrunn
DI Günter Wessner Ingenieurprojekt: Entwicklung ... - HTL Hollabrunn
DI Günter Wessner Ingenieurprojekt: Entwicklung ... - HTL Hollabrunn

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
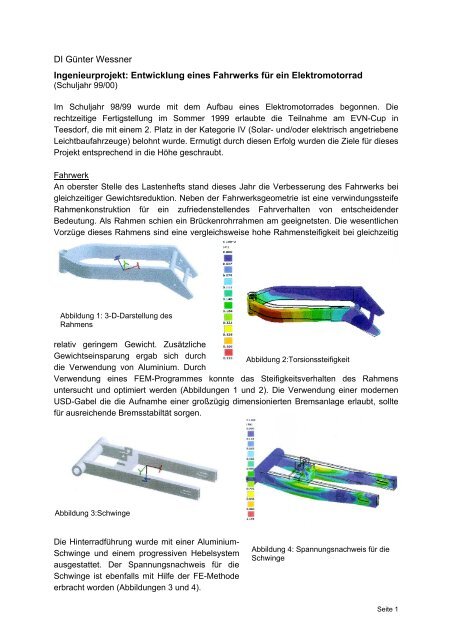
<strong>DI</strong> <strong>Günter</strong> <strong>Wessner</strong><br />
<strong>Ingenieurprojekt</strong>: <strong>Entwicklung</strong> eines Fahrwerks für ein Elektromotorrad<br />
(Schuljahr 99/00)<br />
Im Schuljahr 98/99 wurde mit dem Aufbau eines Elektromotorrades begonnen. Die<br />
rechtzeitige Fertigstellung im Sommer 1999 erlaubte die Teilnahme am EVN-Cup in<br />
Teesdorf, die mit einem 2. Platz in der Kategorie IV (Solar- und/oder elektrisch angetriebene<br />
Leichtbaufahrzeuge) belohnt wurde. Ermutigt durch diesen Erfolg wurden die Ziele für dieses<br />
Projekt entsprechend in die Höhe geschraubt.<br />
Fahrwerk<br />
An oberster Stelle des Lastenhefts stand dieses Jahr die Verbesserung des Fahrwerks bei<br />
gleichzeitiger Gewichtsreduktion. Neben der Fahrwerksgeometrie ist eine verwindungssteife<br />
Rahmenkonstruktion für ein zufriedenstellendes Fahrverhalten von entscheidender<br />
Bedeutung. Als Rahmen schien ein Brückenrohrrahmen am geeignetsten. Die wesentlichen<br />
Vorzüge dieses Rahmens sind eine vergleichsweise hohe Rahmensteifigkeit bei gleichzeitig<br />
Abbildung 1: 3-D-Darstellung des<br />
Rahmens<br />
relativ geringem Gewicht. Zusätzliche<br />
Gewichtseinsparung ergab sich durch<br />
Abbildung 2:Torsionssteifigkeit<br />
die Verwendung von Aluminium. Durch<br />
Verwendung eines FEM-Programmes konnte das Steifigkeitsverhalten des Rahmens<br />
untersucht und optimiert werden (Abbildungen 1 und 2). Die Verwendung einer modernen<br />
USD-Gabel die die Aufnamhe einer großzügig dimensionierten Bremsanlage erlaubt, sollte<br />
für ausreichende Bremsstabiltät sorgen.<br />
Abbildung 3:Schwinge<br />
Die Hinterradführung wurde mit einer Aluminium-<br />
Schwinge und einem progressiven Hebelsystem<br />
ausgestattet. Der Spannungsnachweis für die<br />
Schwinge ist ebenfalls mit Hilfe der FE-Methode<br />
erbracht worden (Abbildungen 3 und 4).<br />
Abbildung 4: Spannungsnachweis für die<br />
Schwinge<br />
Seite 1
Motor<br />
Der Asynchronmotor erreicht eine maximale Leistung von ca. 10kW und wird von insgesamt<br />
4 Batterien gespeist. Die ausgezeichnete Leistungs- und Dremomentencharakteristik erlaubt<br />
den Verzicht auf ein schaltbares Getriebe. Die hohe Motordrehzahl von über 9000U/min ließ<br />
die Konstruktion einer primären Getriebeübersetzung mittels Zahnriemen sinnvoll<br />
erscheinen. Das zusätzliche Gewicht der Primärübersetzung wird aber durch die mögliche<br />
Verwendung handelsüblicher<br />
Kettenräder für das Hinterrad<br />
ausgeglichen. Dadurch kann die<br />
Sekundärübersetzung rasch an<br />
unterschiedliche Anforderungen, die<br />
sich durch eine andere<br />
Streckenführung im Renneinsatz<br />
ergeben können, angeglichen<br />
werden.<br />
Abbildung 5: Motorleistung und Drehmoment<br />
Aerodynamik<br />
Die Verkleidungsteile gewährleisten eine bessere Integration des Fahrers in das Motorrad.<br />
Die rahmenfeste Verkleidung verbesserte zudem den Windschutz, was in einer um 5km/h<br />
höheren Endgeschwindigkeit (ca. 120km/h) ihren Niederschlag fand.<br />
Das Gesamtgewicht konnte auf ca. 143kg reduziert werden. Gegenüber dem<br />
Vorjahresmodell brachte die konsequente Leichtbauweise eine Gewichtseinsparung von ca.<br />
7kg.<br />
Projektpartner<br />
Wesentlichen Anteil am Zustandekommen<br />
dieser Projektarbeit hatten<br />
aber auch eine Reihe von Firmen,<br />
die durch ihre engagierte Mitwirkung<br />
erst den Aufbau dieses Motorrades<br />
ermöglichten. Den untenstehenden<br />
Firmen sei an dieser Stelle herzlich<br />
gedankt:<br />
Abbildung 6: Elektromotorrad vor dem Renneinsatz<br />
Abbildung 6: E-Motorrad vor dem Renneinsatz<br />
Carbo-Tech/Salzburg Karbon-Teile<br />
Castolin + Eutectic/Wien –Hr. Friedrich Aluminium-Schweißen<br />
Edelhauser/Obersulz mechanische Fertigung<br />
ELBAK/Brunn am Gebirge Batterien<br />
Hentschl/Krems Verkleidungsteile, Zubehör<br />
Krameß/Wolkersdorf Sponsoring<br />
Technische Alternative/Amaliendorf Motor/Steuerung<br />
Seite 2
EVN-Cup<br />
Wie letztes Jahr, fanden auch diesmal Rennen für Elektrofahrzeuge, diesesmal aber auf dem<br />
Semperit-Reifentestgelände in Kottingbrunn statt (19./20. August 2000). Die seit vielen<br />
Jahren stattfindende Veranstaltung erfreut sich immer größerer Βeliebtheit. Bei strahlend<br />
schönem Wetter kamen an den beiden Tagen lt. Angaben des Veranstalters ca. 20.000<br />
Zuschauer um die technischen <strong>Entwicklung</strong>en zu bestaunen und die Rennen zu verfolgen.<br />
Dieses Ereignis findet auch bei vielen Medien großen Anklang (z.B. ORF, Radio NÖ...).<br />
Die <strong>HTL</strong>-<strong>Hollabrunn</strong> gab eine Nennung in der Klasse IV- „Solar- und/oder elektrisch<br />
angetriebene Leichtbaufahrzeuge – bis 150kg“ ab.<br />
Der nur 800m lange Rundkurs ließ bereits nach Bekanntwerden des Teilnehmerfeldes eine<br />
gewisse Dramatik erkennen. Insgesamt waren 20 Teams aus ganz Europa (Italien, Schweiz,<br />
Deutschland, Ungarn, ...) am Start.<br />
Im Lauf der ersten Trainingssitzungen wurde der gerade in dieser Kategorie außerordentlich<br />
große Unterschied in den erzielbaren Geschwindigkeiten offensichtlich.<br />
Die langsamen Fahrer stellten je nach Streckenabschnitt ein nahezu unüberwindbares<br />
Hindernis – vor allem beim Überrunden – dar, und beeinflußten – wenn auch ungewollt – den<br />
Rennverlauf. Schlußendlich konnte aber ein respektabler 4. Gesamtrang „erfahren“ werden.<br />
Die erfolgreiche Teilnahme wird zum Anlaß genommen, auch im nächsten Jahr wieder an<br />
diesem Rennen teilzunehmen und durch weitere technische Verbesserungen wieder ganz<br />
vorne dabeizusein.<br />
Rang Nr. Fahrer Nat. Bewerber Fahrzeug Gesamtzeit Runden<br />
1 31 Haimböck Stefan AUT Techn. Alternative BP-Solar Streetflyer 19:22,196 26<br />
2 37 Betti Thomas ITA Itavel Scooter 19:55,617 26<br />
3 32 Lunato David ITA Casini Franco Fanton 20:14,649 26<br />
4 26 Slancar Martin AUT <strong>HTL</strong>-<strong>Hollabrunn</strong>. Spirit o.t. mech. 20:26,041 26<br />
5 47 Nicolini Luca ITA Itavel 20:37,350 26<br />
6 40 Sberlati Stefano ITA Itavel Scooter 20:15,210 24<br />
7 33 Centanaro Aurelio ITA Itavel Scooter 19:22,647 23<br />
8 48 Vorarlberger Heinz AUT AC-Power-Bike A-Race-Bike 19:44,962 22<br />
Martin Slancar (26) knapp hinter dem später zweitplatzierten Italiener Thomas Betti (37)<br />
Seite 3