kapitel 7-8
kapitel 7-8
kapitel 7-8

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Kapitel 7<br />
Deformierbare Körper<br />
Schrittweise Erweiterung unseres Modells der Wirklichkeit.<br />
-WarumkommtMaterieinverschiedenenAggregatszuständenvor?<br />
-PhysikalischeEigenschaften,Dichte,Härte,Elastizität.<br />
7.1 Atomares Modell der Aggregatzustände<br />
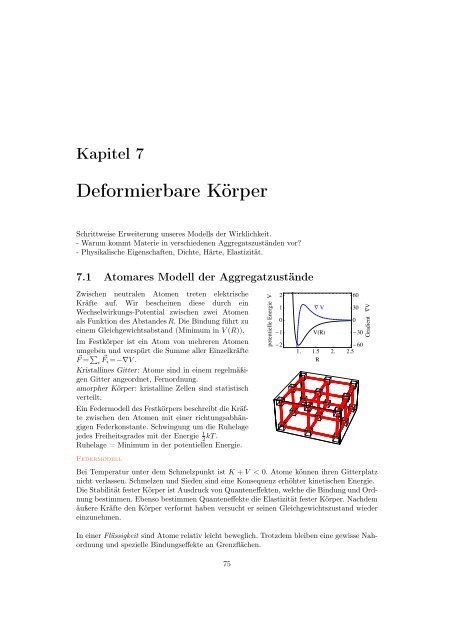
Zwischen neutralen Atomen treten elektrische<br />
Kräfte auf. Wir bescheinen diese durch ein<br />
Wechselwirkungs-Potential zwischen zwei Atomen<br />
als Funktion des Abstandes R. DieBindungführtzu<br />
einem Gleichgewichtsabstand (Minimum in V (R)).<br />
Im Festkörper ist ein Atom von mehreren Atomen<br />
umgeben und verspürt die Summe aller Einzelkräfte<br />
~F = P<br />
i ~ Fi = rV .<br />
Kristallines Gitter: Atomesindineinemregelmäßigen<br />
Gitter angeordnet, Fernordnung.<br />
amorpher Körper: kristallineZellensindstatistisch<br />
verteilt.<br />
Ein Federmodell des Festkörpers beschreibt die Kräfte<br />
zwischen den Atomen mit einer richtungsabhängigen<br />
Federkonstante. Schwingung um die Ruhelage<br />
jedes Freiheitsgrades mit der Energie 1<br />
2 kT.<br />
Ruhelage = Minimum in der potentiellen Energie.<br />
Federmodell<br />
potentielle Energie V<br />
2<br />
1<br />
0<br />
-1<br />
-2<br />
— V<br />
VHRL<br />
60<br />
30<br />
-30<br />
1. 1.5<br />
R<br />
2.<br />
-60<br />
2.5<br />
Bei Temperatur unter dem Schmelzpunkt ist K + V < 0. AtomekönnenihrenGitterplatz<br />
nicht verlassen. Schmelzen und Sieden sind eine Konsequenz erhöhter kinetischen Energie.<br />
Die Stabilität fester Körper ist Ausdruck von Quanteneffekten, welche die Bindung und Ordnung<br />
bestimmen. Ebenso bestimmen Quanteneffekte die Elastizität fester Körper. Nachdem<br />
äußere Kräfte den Körper verformt haben versucht er seinen Gleichgewichtszustand wieder<br />
einzunehmen.<br />
In einer Flüssigkeit sind Atome relativ leicht beweglich. Trotzdem bleiben eine gewisse Nahordnung<br />
und spezielle Bindungseffekte an Grenzflächen.<br />
75<br />
0<br />
Gradient —V
76 KAPITEL 7. DEFORMIERBARE KÖRPER<br />
7.2 Deformierbare feste Körper<br />
Massenkräfte: Gravitation und Trägheit betrifft alle Volumenelemente.<br />
Oberflächenkräfte: führen zur Deformation der Oberflächenschicht, die sich in den Körper<br />
fortpflanzt.<br />
Elastisch: Nach Krafteinwirkung verschwindet die Deformation völlig.<br />
Plastisch: eine Formänderung bleibt zurück.<br />
Spannung und Dehnung:<br />
Eine Oberflächenkraft (Zug) wirkt senkrecht auf die Stirnfläche eines Objektes mit Querschnitt<br />
A. DiesführtzueinerLängenänderung L. Für L ⌧ L gilt das Hooksche Gesetz:<br />
F = E A L<br />
L<br />
wobei E den Elastizitätsmodul angibt.<br />
Zugspannung ist Kraft pro Flächeneinheit<br />
= F L<br />
= E<br />
A L .<br />
Diese lineare Näherung gilt nur für kleine Deformationen.<br />
Ursprung der Linearität: Nahe der Ruhelage hat Epot die<br />
Form einer Parabel, damit ist die Verschiebung linear mit<br />
der Kraft.<br />
Außerhalb des Propotionalitätsbereichs erfolgt Dehnung<br />
(Potential weniger steif, nichtlinear), dann Fließgrenze<br />
(Netzebenen verschieben sich, plastischer Bereich), gefolgt<br />
von Bruch.<br />
Elastische Hysterese: DieerstmaligeÄnderungführtvon<br />
O !A, zurückaufA!B. PermanenteVerformungbleibt.<br />
Experiment zum Hookschen Gesetz, Fließgrenze und Bruch.<br />
Querkontraktion:<br />
Bei Dehnung ändert sich auch die Querdimension:<br />
✓ ◆ ✓ ◆<br />
d L<br />
µ = /<br />
d L<br />
µ =Poissonzahl,Querkontraktionszahl.DaV = d 2 L ist gilt<br />
V<br />
V<br />
=<br />
=<br />
L<br />
L +2<br />
d<br />
d<br />
L<br />
L (1 2µ) = (1<br />
E<br />
2µ)<br />
Σ<br />
0.2<br />
0.1<br />
0<br />
�0.1<br />
�0.2<br />
�0.4<br />
�0.2<br />
L<br />
O B<br />
�L<br />
A<br />
A<br />
0<br />
�L�L<br />
0.2 0.4<br />
Durch die Zugspannung wird das Volumen größer, also sollte µ
7.2. DEFORMIERBARE FESTE KÖRPER 77<br />
Kompression eines isotropen, homogenen Körpers.<br />
Jede Abmessung wird durch den Druck auf zwei dazu parallel<br />
liegenden Flächen verformt.<br />
V<br />
V<br />
=<br />
=<br />
L<br />
L +2<br />
d<br />
d<br />
p<br />
(1<br />
E<br />
2µ) =<br />
1<br />
K p<br />
K =Kompressionsmodul.(1/K =Kompressibilität)<br />
Scherung<br />
Scherkräfte sind Oberflächenkräfte die tangential angreifen. Mit<br />
der Scherspannung<br />
⌧ = F<br />
d 2<br />
bezeichnet man die pro Flächeneinheit wirkende tangentiale Kraft.<br />
Durch die Scherspannung werden die Kanten des Quaders um den<br />
Winkel ↵ verkippt. Bei kleinem Winkel gilt (G =Schub-,Scher-,<br />
Torsionsmodul)<br />
⌧ = G ↵.<br />
Torsion eines Drahtes mit Radius R. WirstellenunsdenDrahtalsSummevonkonzentrischen<br />
Zylinderhülsen (Radius r) vor.Fürr ⌧ L ist ↵ = ' r/L und die Scherspannung ist<br />
⌧ = G r'<br />
L .<br />
Torsion eines Wasserschlauches.<br />
Die rücktreibende Kraft eines Objektes nach Scherung<br />
äußert sich in einem Drehmoment<br />
Z Z R<br />
M = r⌧dA= 2⇡r 2 ⌧dr<br />
= ⇡ G '<br />
2 L R4<br />
= apple'= DR '<br />
0<br />
.<br />
.<br />
L<br />
d<br />
Α<br />
L L<br />
Das Richtmoment des Objektes apple wird oft auch mit DR bezeichnet.<br />
Die Bedeutung von apple ist Drehmoment pro Winkeleinheit. apple wächst mit R 4 an. Drehpendel<br />
zur Messung sehr kleiner Drehmomente verwendet dünne Torsionsfäden.<br />
Vergleich der Schwingungsperiode für dünne und dicke Drähte mit Hilfe von (6.26).<br />
Balkenbiegung<br />
Zugspannung und Druck, Krümmung der neutralen Faser,<br />
Spannungsdoppelbrechung zur Sichtbarmachung der Balkendeformation.<br />
Experiment zur Balkenbiegung, neutrale Faser.<br />
d<br />
d � d<br />
Α<br />
�<br />
p<br />
Τ
78 KAPITEL 7. DEFORMIERBARE KÖRPER<br />
7.3 Hydrostatik - Ruhende Flüssigkeiten<br />
Grob gesagt besitzen ausgedehnte Flüssigkeiten keine bestimmte Gestalt. Deshalb bedürfen<br />
Gestaltsänderungen von Flüssigkeiten relativ kleiner Kräfte. Bei konstantem Volumen<br />
rühren die für eine Gestaltsänderung notwendigen Kräfte von Reibungs- und Oberflächeneffekten<br />
her.<br />
Ideale Flüssigkeit: keineReibung,keineOberflächeneffekte.AtomeinderFlüssigkeitsind<br />
frei verschiebbar. (Schubmodul G =0). Die horizontale Lage einer ruhenden Flüssigkeitsoberfläche<br />
ist durch die Schwerkraft bestimmt. Bei Bewegung stellt sich die (stationäre)<br />
Oberfläche immer senkrecht zur resultierenden Kraft ein.<br />
- Ober mit Schwung beim Servieren wäre ein Beispiel, oder<br />
z<br />
- Flüssigkeitsoberfläche in einem rotierenden Zylinder:<br />
tan ↵ = !2 r<br />
g<br />
z(r) = !2<br />
Z<br />
g<br />
= dz<br />
dr<br />
rdr= !2 r 2<br />
2g<br />
+ z0 .<br />
z0 ist über die Erhaltung der Masse zu bestimmen.<br />
Parabolische Oberfläche einer rotierenden Flüssigkeit A61.5<br />
z0<br />
a<br />
F = m g<br />
Statischer Druck in einer idealen Flüssigkeit:<br />
Die Tangentialkomponente der Gesamtkraft an der Oberfläche einer idealen Flüssigkeit ist<br />
Null, also wirkt der Druck immer senkrecht zur Oberfläche.<br />
Druck: p = F/A<br />
Ruhende Flüssigkeit: Da die Flüssigkeitsmoleküle frei beweglich angenommen werden,<br />
muss die Gesamtkraft auf ein ruhendes Volumenelement gleich Null sein.<br />
Wird das Eigengewicht der Flüssigkeit vernachlässigt dann<br />
gilt : rp =0, Der Druck im Flüssigkeitsvolumen ist konstant.<br />
Auf jedes Flächenelement der umgebenden Wände herrscht F1<br />
F2<br />
derselbe Druck (isotrope Druckverteilung). Anwendung bei der<br />
A1<br />
A2<br />
hydraulischen Presse,<br />
F1/A1 = F2/A2 .<br />
Experiment: Druckvergleich in zwei Kolben B27.7<br />
Schweredruck :<br />
Wir nehmen an, dass die Dichte ⇢ in der Flüssigkeit unabhängig<br />
vom Druck ist. Jedes Volumenelement hat ein Gewicht<br />
⇢gdV.DamitistderDruckamBodeneinerFlüssigkeitssäule<br />
der Höhe h gleich p(0) = ⇢gh.EineWassersäulevon10m<br />
Höhe erzeugt den Druck<br />
p(0) = ⇢gh⇡ 10 5 Pascal =1bar = 10 5 N/m 2 .<br />
Cartesischer Taucher, Waage+Hand B25.4<br />
h<br />
A<br />
dV<br />
F = ∑ g h A<br />
Die Kraft auf der Oberseite eines Flüssigkeitsquaders der Höhe z und der Fläche A ist um<br />
den Betrag F = ⇢g zA= ⇢g V kleiner als auf der Unterseite. Diese Differenz entsteht<br />
durch das Gewicht des Flüssigkeitsquaders. Die Annahme konstanter Dichte der Flüssigkeit<br />
mw 2 r
7.3. HYDROSTATIK - RUHENDE FLÜSSIGKEITEN 79<br />
ist durch die sehr geringe Kompressibilität von Wasser gerechtfertigt,<br />
1<br />
K =<br />
V<br />
V<br />
1<br />
p ⇡ 5 ⇥ 10 10 m 2<br />
N .<br />
Hydrostatisches Paradoxon: Der Schweredruck am Boden hängt nur von der Höhe, nicht aber<br />
der Gestalt des Behälters ab.<br />
Hydrostatisches Paradoxon Bxx<br />
Auftrieb: (Archimedisches Prinzip) ScheinbarerGewichtsverlustentsprichtdemGewichtderverdrängten<br />
Flüssigkeitsmasse. Wir betrachten einen Quader ( F = Mg= ⇢f gA z ), eingetaucht in<br />
einer Flüssigkeit. Der Druckunterschied zwischen Ober- und Unterseite des Quaders ist<br />
p = ⇢fl g z.<br />
Damit ergibt sich eine Auftriebskraft<br />
FA = A p = A⇢fl g z = Gfl<br />
die gerade der Gewichtskraft der verdrängten Flüssigkeit Gfl entspricht.<br />
Ein Körper der Gewichtskraft Gk verliert scheinbar so<br />
viel an Gewicht, wie die von ihm verdrängte Flüssigkeit wiegt.<br />
A<br />
F = M g<br />
Schwimmen ergibt sich wenn Gk = FA = Gfl ist. Dann taucht der Körper vollständig in die<br />
Flüssigkeit ein und ist in jeder Position in der Flüssigkeit im Gleichgewicht.<br />
Wenn Gk < FA = Gfl ist, dann ragt ein Teil des Körpers aus der Flüssigkeit heraus.<br />
Beispiel Eisberg:<br />
Die Dichte von Eis ist ⇢f =0.95 kg/dm 3 ,dieDichtevonWasserbei0 o Cist ⇢fl =1.05 kg/dm 3 .<br />
Der Eisberg hat ein Volumen V = V1 + V2. DasVolumenV1 ist über der Wasseroberfläche, während<br />
V2 unterhalb der Wasseroberfläche liegt. Es gilt ⇢flV2g = ⇢fVg.<br />
Daraus folgt V2/V = ⇢f /⇢fl =0.904. Etwa10%desEisbergesragenausdemWasser.<br />
Beispiel Luftballon:<br />
Ein Luftballon steigt auf Grund des Unterschiedes der Dichte der Luft und des Ballongases. Die Dichte<br />
eines Gases ist proportional zu seiner Molmasse. Die Molmasse gibt das Gewicht von ⇡ 22.7 Liter<br />
eines Gases bei Normalbedingungen T =0 o Cundp =10 5 Pa=1 bar.<br />
Helium 4 g/mol<br />
Stickstoff 28 g/mol<br />
Luft 29 g/mol<br />
SF6 146 g/mol<br />
Wenn wir den leichten Überdruck des Ballongases und das Gewicht<br />
seiner Hülle vernachlässigen, gilt für die Auftriebskraft<br />
FA Fk =(⇢luft ⇢gas)Vg<br />
Die stationäre Aufstiegsgeschwindigkeit erhalten wir aus der Balance von FA Fk und dem Strömungswiderstandskraft<br />
FS aus Gleichung (5.74) aufSeite55.<br />
(⇢luft ⇢gas)Vg= 1<br />
2 ⇢luftcW Av 2 . (7.1)<br />
Mit dem Volumen des kugelförmigen Ballons V =4⇡R 3 /3 und seiner Querschnittsfläche A = R 2 ⇡<br />
ergibt sich<br />
v =<br />
r ⇢luft ⇢gas<br />
⇢luft<br />
wobei R der Ballonradius ist.<br />
8R<br />
, (7.2)<br />
3 cW<br />
Archimedes B25.6, Schiff schwimmt auf Gas B25.7, Aräometer B25.8<br />
FA<br />
Dz
80 KAPITEL 7. DEFORMIERBARE KÖRPER<br />
7.4 Grenzflächen an Flüssigkeiten<br />
Offensichtlich gibt es Kräfte, die Flüssigkeitsteilchen zusammenhalten<br />
(Kohäsion). Im Inneren einer Flüssigkeit wird die Kraft auf ein Molekül<br />
im zeitlichen Mittel gleich Null. An der Oberfläche fehlen Nachbarmoleküle.<br />
Damit bleibt an der Oberfläche eine Resultierende in Richtung<br />
zur Flüssigkeit, die Oberflächenspannung.<br />
Wir betrachten die Energieflächendichte, dienotwendigistumMoleküle<br />
an die Oberfläche zu bringen. Das gelingt bei einer Vergrößerung<br />
der Oberfläche um A. DabeileistenwirdieArbeit W :<br />
✏ = W<br />
A<br />
[✏] = J N<br />
=<br />
m2 m .<br />
Messung der Oberflächenspannung einer Seifenlamelle über die Kraft<br />
auf einen Querbügel den wir um den Weg s verschieben:<br />
W = F s = ✏ 2 L s = ✏ A 2 .<br />
Der Faktor 2 berücksichtigt, dass die Seifenlamelle zwei Oberflächen<br />
hat. Auf die Oberfläche wirkt die tangentiale Zugspannung = Oberflächenspannung.<br />
Die Oberflächenspannung und spezifische Oberflächenenergie<br />
sind einander gleich.<br />
= ✏ = F Energie<br />
= . F<br />
2L Fläche<br />
Für Wasser ist =0.07 N/m bei 20 C, für Hg ist =0.47 N/m und für Methanol =0.02 N/m.<br />
In homogenen Flüssigkeiten steigt die Oberflächenspannung mit der Siedetemperatur an. (Methanol:Wasser:Quecksilber=<br />
338:373:600 K). Seifenlamellen (Seifenblasen) sind komplexere Objekte,<br />
eine Wasserschicht liegt zwischen den hydrophilen Enden zweier Tensidschichten aus Seifenanionen.<br />
Wasseroberfläche und Ring B35.1<br />
Überdruck in einer Seifenblase<br />
Die Seifenblase versucht auf Grund der Oberflächenspannung ihre Oberfläche zu verringern. Damit<br />
erhöht sich der Luftdruck in der Seifenblase. Gleichgewicht herrscht, wenn der Energiegewinn beim<br />
Verringern der Oberfläche 2✏ A, gleichistderArbeit V p, diegegendenÜberdruckgeleistet<br />
wird. Das Volumen einer Kugel ist VK =4⇡R 3 /3, ihreOberflächeAK =4⇡R 2 .<br />
Wenn sich das Volumen um VK =4⇡R 2 R verringert,<br />
dann verringert sich die Oberfläche um AK =8⇡R R.<br />
Die Arbeit gegen den Druck ist<br />
W = V p =4⇡R 2 R p. (7.3)<br />
Sie wird von der Oberflächenspannung aufgebracht<br />
W =2✏ A =16✏⇡R R. (7.4)<br />
Gleichsetzen von (7.3) und(7.4) liefert den Überdruck<br />
p =4✏/R . (7.5)<br />
Experiment zum Überdruck in einer Seifenblase B32.1<br />
2R<br />
R<br />
p ��p<br />
L<br />
�R<br />
�s
7.4. GRENZFLÄCHEN AN FLÜSSIGKEITEN 81<br />
Minimale Oberflächen :<br />
Die Kugelgestalt einer Seifenblase ist das Resultat der Oberflächenspannung, das eingeschlossene<br />
Volumen soll minimiert werden und eine Kugel hat bei gegebener Oberfläche das kleinste Volumen.<br />
Dies gilt für ✏>0, dann ist für A
82 KAPITEL 7. DEFORMIERBARE KÖRPER<br />
.<br />
.<br />
gas<br />
Σ13<br />
�<br />
Σ23<br />
Σ12<br />
R solid<br />
liquid<br />
Wenn 13 > 12 dann ist 'Kohäsion)<br />
Eine Flüssigkeitslinse<br />
(Material 2) liegt auf der Grenzfläche<br />
zwischen der flüssigen Phase<br />
1undderGasphase3.<br />
gas<br />
Σ23<br />
Σ13<br />
�<br />
liquid<br />
Σ12<br />
R solid<br />
Wenn 13 < 12 dann ist '>90 o ,<br />
Beispiel: Hg-Glas-Luft.<br />
(Kohäsion>Adhäsion)<br />
Σ13 Σ23<br />
Für 13 12 > 23 ist Gleichung (7.6) für keinen Winkel erfüllt. Es verbleibt eine Kraftkomponente<br />
parallel zur Grenzfläche 1-3. Die Kontaktlinie bewegt sich, bis die Oberfläche völlig benetzt wird.<br />
Kapillarität<br />
Wir betrachten ein enges Rohr mit benetzender Flüssigkeit 13 > 12. Der Innenradius der Kapillare<br />
sei kleiner als der konkav geformte Bereich der Flüssigkeitsoberfläche.<br />
Für eine einfach gewölbte Flüssigkeitsoberfläche gilt (siehe Gl. 7.5)<br />
p = 2<br />
R .<br />
Zwischen dem Radius der gekrümmten Flüssigkeitsoberfläche R und dem Durchmesser der Kapillare<br />
(2r) bestehtdieBeziehungR cos ' = r.<br />
j<br />
2 r<br />
R<br />
�<br />
r<br />
�<br />
R<br />
Σ12<br />
2<br />
4 2 1<br />
Die Oberflächenspannung hält dem Schweredruck das Gleichgewicht. Dieser Ansatz gilt, weil die integrierte<br />
Kraftwirkung auf die Oberfläche durch die Oberflächenspannung gerade r 2 ⇡ 2<br />
ist und die<br />
R<br />
gesamte Gewichtskraft ⇡ r 2 ⇡⇢ g h. Die Steighöhe in der Kapillare erlaubt die Bestimmung von .<br />
2<br />
R =<br />
2<br />
2 cos '<br />
= ⇢gh ! h = .<br />
r/ cos ' r⇢g<br />
Steighöhe in Kapillaren B31.2<br />
3<br />
1
Kapitel 8<br />
Mechanische Schwingungen<br />
Schwingungen materieller Objekte können zu hörbaren Tönen führen, sie können so subtil<br />
sein wie die Bewegung der Atome in einem Schwingquarz, oder so groß wie ein Erdbeben.<br />
In ausgedehnten Medien pflanzen sich Schwingungen als Wellen aus. Zwei physikalische<br />
Gründe gibt es für das Auftreten mechanischer Schwingungen, die Trägheit und die Stabilität<br />
materieller Objekte. Stört man diese Stabilität dann treten Bindungskräfte auf, die das<br />
Gleichgewicht wieder herstellen, siehe Bild auf Seite 75.<br />
8.1 Freier ungedämpfter Oszillator<br />
Massepunkt an Feder, Hooksches Gesetz für die rücktreibende<br />
Kraft<br />
F = ky<br />
Aus der Bewegungsgleichung mit y = z z0<br />
m ¨y = ky<br />
erhalten wir mit der Abkürzung ! 2 0 = k/m (!0 ist<br />
die Eigenfrequenz) die Schwingungsgleichung<br />
für den harmonischen Oszillator:<br />
¨y + ! 2 0 y =0. (8.1)<br />
Eine allgemeine Lösung ist<br />
y(t) =C1 cos !0t + C2 sin !0t (8.2)<br />
bzw. mit C1 = A cos ' und C2 = A sin '<br />
y(t) =A cos (!0t + ') (8.3)<br />
Das Argument der Kosinusfunktion (!0t + ') bestimmt den momentanen Wert der Auslenkung<br />
y(t). In unserem Beispiel kann man den Zeitnullpunkt so legen, dass die Phase ' gleich<br />
Null wird.<br />
Nach einer Schwingungsdauer, T =2⇡/!0 wird derselbe Wert von y(t) erreicht.<br />
83<br />
k.y<br />
m<br />
z0<br />
z
84 KAPITEL 8. MECHANISCHE SCHWINGUNGEN<br />
8.2 Freier gedämpfter Oszillator<br />
Wenn das Federpendel in einer Flüssigkeit schwingt kommt<br />
zur Federkraft F = ky noch eine Reibungskraft dazu, z.B.<br />
die Stokesche Reibung,<br />
FR = 6⇡⌘rv.<br />
Mit =3⇡⌘r/m ist die Bewegungsgleichung<br />
¨y + ! 2 0 y +2 ˙y =0. (8.4)<br />
Dabei ist !0 die Eigenfrequenz des ungedämpften Federpendels.<br />
Eine allgemeine Lösung für (8.4) ist<br />
y(t) =e<br />
t c e i p ! 2 0<br />
2 t + c ⇤ e i p ! 2 0<br />
2 t<br />
. (8.5)<br />
Die Größe ⌧ = 1 stellt die charakteristische Dämpfungszeit dar. Das zeitliche Schwingungsverhalten<br />
hängt von dem Verhältnis !0/ ab. Für schwache Dämpfung
8.3. ERZWUNGENE SCHWINGUNGEN 85<br />
8.3 Erzwungene Schwingungen<br />
Eine periodische externe Kraft mit der Amplitude F0 und der Frequenz !e treibt die Bewegung<br />
des gedämpften harmonischen Oszillators. In diesem Fall ist die Bewegungsgleichung<br />
inhomogen,<br />
¨y + ! 2 0 y +2 ˙y = F0<br />
m cos !e t. (8.8)<br />
Eine allgemeine Lösung dieser Differentialgleichung ist<br />
y(t) =A cos (!e t + ') (8.9)<br />
mit einer Amplitude A, dievonderexternenFrequenz<br />
abhängt<br />
A =<br />
q<br />
(! 2 0<br />
F0/m<br />
! 2 e) 2 +4 2 ! 2 e<br />
. (8.10)<br />
und einer Phasenverschiebung ', dieebenfallsvonderexternenFrequenzabhängt:<br />
m<br />
w0<br />
z0<br />
z<br />
we<br />
¨ 2 F0 Æ<br />
' = arctan ⇥ 2 !e/(! 2 0 ! 2 e) ⇤ . (8.11)<br />
Gleichung (8.9) beschreibtdensogenanntenstationären Fall, der Oszillator schwingt mit<br />
der Erregerfrequenz !e verschoben in seiner Phase um '. Dieser Fall gilt für Zeiten, die<br />
1 sehr viel länger sind als die charakteristische Dämpfungszeit, t .DieAmplitudeder<br />
erzwungenen Schwingung (8.10) hängtabvon<br />
• der Amplitude der äußeren Kraftwirkung F0/m, vonderDämpfung und vom Verhältnis<br />
Erregerfrequenz zu Eigenfrequenz, !e/!0.<br />
• Das Amplitudenmaximum liegt bei der Resonanzfrequenz !e = !r = p ! 2 0 2 2 .Das<br />
Maximum verschiebt sich mit steigender Dämpfung zu kleineren Frequenzen.<br />
• Die Phase des bewegten Objektes (8.11) ist verzögert gegenüber der der Erregerschwingung.<br />
Die Phasenverzögerung ist frequenzabhängig. Die Schwingung ist in Phase mit<br />
der Erregerschwingung bei kleinen Erregerfrequenzen. Sie ist gegenphasig für !e !0.<br />
Ohne Dämpfung erfolgt ein sprunghafter Wechsel der Phase um ⇡ bei Resonanz.<br />
A<br />
F0 ê m<br />
3<br />
2<br />
1<br />
w0=1<br />
0<br />
0 1 2<br />
weêw0<br />
g=0.1<br />
g=0.25<br />
g=0.5<br />
g=1<br />
j<br />
3<br />
2<br />
1<br />
w0=1<br />
g=0.1<br />
0<br />
0 1 2<br />
weêw0<br />
g=1<br />
g=0.5<br />
g=0.25<br />
Die Bewegung ist komplizierter während des Einschwingens. Im Einschwingvorgang<br />
sind Bewegungen mit der Eigenfrequenz noch sichtbar, siehe die folgenden Bilder. Die
86 KAPITEL 8. MECHANISCHE SCHWINGUNGEN<br />
Dämpfung wurde immer mit 2 =0.1 angenommen, die Eigenfrequenz mit !0 =1.Die<br />
Erregerschwingung rot gezeichnet, die Bewegung des getriebenen Oszillators in schwarz. Die<br />
Frequenz der Erregerschwingung verändert sich von !e =0.1 (erstes Bild) bis !e =2(letztes<br />
Bild). Die Periode der Eigenschwingung ist durch die Gitterlinien eingezeichnet.<br />
Amplitude<br />
Amplitude<br />
1.5<br />
1.0<br />
0.5<br />
0.0<br />
-0.5<br />
-1.0<br />
y ¢¢ HtL + 0.1 y ¢ HtL + yHtL á cosH0.1 tL<br />
0 20 40 60 80 100<br />
Zeit<br />
y<br />
4<br />
¢¢ HtL + 0.1 y ¢ HtL + yHtL á cosH0.8 tL<br />
2<br />
0<br />
-2<br />
-4<br />
0 20 40 60 80 100<br />
Zeit<br />
Amplitude<br />
Amplitude<br />
1.5<br />
1.0<br />
0.5<br />
0.0<br />
-0.5<br />
-1.0<br />
y ¢¢ HtL + 0.1 y ¢ HtL + yHtL á cosH0.2 tL<br />
-1.5<br />
0 20 40 60 80 100<br />
Zeit<br />
10<br />
5<br />
0<br />
-5<br />
y ¢¢ HtL + 0.1 y ¢ HtL + yHtL á cosHtL<br />
-10<br />
0 20 40 60 80 100<br />
Zeit<br />
Amplitude<br />
Amplitude<br />
1.5<br />
1.0<br />
0.5<br />
0.0<br />
-0.5<br />
-1.0<br />
-1.5<br />
1.0<br />
0.5<br />
0.0<br />
-0.5<br />
y ¢¢ HtL + 0.1 y ¢ HtL + yHtL á cosH0.4 tL<br />
0 20 40 60 80 100<br />
Zeit<br />
y ¢¢ HtL + 0.1 y ¢ HtL + yHtL á cosH2 tL<br />
-1.0<br />
0 20 40 60 80 100<br />
Zeit<br />
Die Erregung beginnt schlagartig (cos !et). Der Einschwingvorgang mit der Eigenfrequenz<br />
ist bei kleinem ⌦ am deutlichsten sichtbar (erstes und zweites Bild). Die Resonanzüberhöhung<br />
ist im vierten und fünften Bild ersichtlich. Die gegenphasige Bewegung zeigt sich bei<br />
hohen Erregerfrequenzen im letzten Bild.<br />
Einschwingvorgang, Resonanz und Phasenschub beim getriebenen Schlitten.<br />
8.4 Parametrischer Oszillator<br />
Wenn sich die Länge eines Fadenpendels periodisch<br />
ändert, (im Bild ! = !e)<br />
`(t) = `0 + r cos (!et + )<br />
= `0 [1 + cos (!et + )] (8.12)<br />
ändern sich auch die Eigenschaften des Oszillators<br />
periodisch.<br />
Für das Fadenpendel mit kleiner Auslenkung<br />
hatten wir (Seite 69), jetzt mit Dämpfung<br />
¨' +2 ˙' + ! 2 0 ' =0, (8.13)<br />
wobei !0 = p g/`0 war. Ändert sich die Fadenlänge periodisch haben wir eine nichtlineare<br />
Differentialgleichung mit `(t) aus (8.12) undderDefinition⌦(t) = p g/`(t),<br />
¨' +2 ˙' +⌦ 2 (t) ' =0. (8.14)<br />
Für kleine Werte von schreiben wir für (8.12) ⌦2 (t) ⇡ ! 2 ⇥<br />
0 1 2 cos (!et + ) ⇤ . In dieser linearen<br />
Näherung ergibt sich eine Matthieusche Differentialgleichung. Die Kontrollparameter<br />
!e, , bestimmen die Bereiche für stabile Trajektorien des Oszillators. Die Energiezufuhr<br />
durch die von äußen erwirkte Längenänderung wird optimal, wenn die treibende Frequenz<br />
r<br />
Ω<br />
�0<br />
�0
8.5. GEKOPPELTE OSZILLATOREN 87<br />
!e das Doppelte der Eigenfrequenz !0 des Pendels ist. Die Bilder zeigen die Pendeltrajektorie<br />
(schwarz) und die Pendelänge (rot) für !e =2!0 und für !e = !0.<br />
jHtL Amplitude<br />
j<br />
2<br />
¢¢ HtL + 0.02 j ¢ HtL + jHtL H1 - 0.2 cosH2 tLL á 0.<br />
1<br />
0<br />
-1<br />
Länge des Pendels<br />
j<br />
2<br />
¢¢ HtL + 0.02 j ¢ HtL + jHtL H1 - 0.2 cosHtLL á 0.<br />
-2<br />
0 20 40 60 80 100<br />
-2<br />
0 20 40 60 80 100<br />
Zeit<br />
Zeit<br />
Technische Beispiele dafür sind : Quadrupol-Massenspektrometer, optisch parametrischer<br />
Oszillator.<br />
Parametrisch getriebenes Fadenpendel.<br />
8.5 Gekoppelte Oszillatoren<br />
Am Beispiel zweier Massepunkte und drei Federn. Die Auslenkung jeder Masse hängt auch<br />
von der Stellung der anderen Masse ab. Für die Bewegungsgleichungen erhält man ein gekoppeltes<br />
System zweier Differentialgleichungen. Mit den drei Federkonstanten k1, k2 und<br />
k12 ergibt sich für die beiden Massen<br />
k m k12 m k<br />
m1¨z1 = kz1 + k12(z2 z1) (8.15)<br />
z1<br />
z2<br />
jHtL Amplitude<br />
1<br />
0<br />
-1<br />
Länge des Pendels<br />
m2¨z2 = kz2 k12(z2 z1) (8.16)<br />
wobei z1 und z2 die Auslenkung der beiden Massen von ihrer jeweiligen Ruhelage angibt.<br />
Es gibt spezielle Bewegungen für welche beide Massen harmonische Schwingungen ausführen:<br />
Normalschwingungen (Eigenschwingungen). Gleichungen für diese Normalschwingungen<br />
erhalten wir durch Addition und Subtraktion von (8.15) und(8.16). Dabei entstehen neue<br />
Koordinaten: (z1+z2)/2 beschreibt die Bewegung des Schwerpunktes beider Massen, (z1 z2)<br />
die Dehung der Feder zwischen beiden Massen.<br />
Demonstrationsbeispiel: zwei Pendel, die mit einer Feder gekoppelt sind: parallele Schwingung<br />
(in Phase) und antiparallel (gegenphasig). Ebenso: Energieaustausch zwischen beiden<br />
Pendeln.<br />
Normalmoden, Schwebung gekoppelter Pendel.<br />
Verallgemeinerung: Ein gekoppeltes und entlang einer Geraden oszillierendes System mit N<br />
Massen hat genau N unabhängige Eigenschwingungen. Die allgemeine Bewegung des gekoppelten<br />
Systems ist eine Superposition dieser Eigenschwingungen. Bei äußerer Anregung mit<br />
einer Frequenz nahe einer Eigenschwingung tritt diese mit großer Amplitude auf.<br />
Bei einem mehratomigen Molekül: Jedes der N Atome hat 3 Freiheitsgrade der Bewegung.<br />
Ein N-atomiges Molekül hat 3N Freiheitsgrade (FHG).
88 KAPITEL 8. MECHANISCHE SCHWINGUNGEN<br />
Drei der Translation des Schwerpunktes<br />
und 3 für Rotation um den<br />
Schwerpunkt. Damit bleiben 3N 6<br />
FHG übrig für Schwingungen. Für<br />
ein lineares Molekül gibt es nur zwei<br />
FG der Rotation und deshalb blei-<br />
Ν2<br />
ben 3N-5 FHG für Schwingungen. Ν3<br />
�<br />
Ν1<br />
Das Bild zeigt für CO2 und H2O die symmetrische Streckschwingung ⌫1, die(fürCO2 zweifach<br />
entartete) Biegeschwingung ⌫2 und die asymmetrische Streckschwingung ⌫3. Normalschwingungen<br />
sind so definiert, dass bei Bewegung entlang einer Normalschwingungskoordinate<br />
der Schwerpunkt des Systems in Ruhe bleibt und keine Rotation des Objektes auftritt.<br />
8.6 Überlagerung von Schwingungen<br />
In der Natur treten reine harmonische Schwingungen nur selten auf. Meist hat man es mit<br />
Überlagerungen zu tun.<br />
Die Überlagerung zweier Schwingungen gleicher Frequenz:<br />
x1(t) = a1 cos (!t+ '1)<br />
x2(t) = a2 cos (!t+ '2)<br />
ergibt mit dem Additionstheorem<br />
cos (!t + 'i) = cos !t cos 'i sin !t sin 'i<br />
eine Schwingung gleicher Frequenz mit einer Phasenverschiebung<br />
Dabei ist<br />
x(t) =x1(t)+x2(t) =C cos (!t+ ') .<br />
tan ' = a1 sin '1 + a2 sin '2<br />
a1 cos '1 + a2 cos '2<br />
und die Amplitude<br />
C =<br />
q<br />
a 2 1 + a2 2 +2a1a2 cos ('1 '2) .<br />
Für '1 =0, '2 = und a1 = a2 =1ergibt sich<br />
x(t) =x1(t)+x2(t) = p 2(1 + cos ) cos<br />
�a1<br />
�a2<br />
�Π 0 Π 2Π<br />
�c<br />
0<br />
�c<br />
0<br />
�a2<br />
0<br />
�1<br />
apple<br />
✓<br />
sin<br />
!t arctan<br />
1 + cos<br />
x1�t�<br />
�a1<br />
�Π 0 Π 2Π<br />
x�t�<br />
�Π 0 Π 2Π<br />
◆<br />
�<br />
.<br />
�2<br />
x2�t�<br />
Ν1<br />
Ν2<br />
Ν3
8.6. ÜBERLAGERUNG VON SCHWINGUNGEN 89<br />
Eine Überlagerung zweier Schwingungen mit unterschiedlicher Frequenz<br />
ergibt Schwebungen:<br />
x1(t) = a cos (!1 t)<br />
x2(t) = a cos (!2 t)<br />
x1(t)+x2(t) ergibt die Schwebung<br />
✓ ◆ ✓ ◆<br />
!1 !2 !1 + !2<br />
x(t) =2a cos t cos t<br />
2<br />
2<br />
Wenn !1 !2 klein ist, kann man die mittlere Frequenz<br />
¯! =(!1 + !2)/2 einführen und diese Gleichung wie folgt<br />
interpretieren: Schwingungen mit der Frequenz ¯! und einer<br />
Amplitude, die langsam mit der Einhüllenden<br />
✓ ◆<br />
!1 !2<br />
E(t) =2a cos t<br />
2<br />
moduliert ist (Schwebung).<br />
Schwebung zweier Stimmgabeln mit Mikrophon.<br />
1<br />
0<br />
�1<br />
1<br />
0<br />
�1<br />
2<br />
0<br />
0 Π 2Π 3Π 4Π<br />
0 Π 2Π 3Π 4Π<br />
E<br />
x1�t� � cos Ω1t<br />
x2�t� � cos Ω2t<br />
�2<br />
x�t�<br />
0 Π 2Π 3Π 4Π<br />
Die zweidimensionale Überlagerung von Schwingungen ergibt Lissajous-Figuren.<br />
Zwei lineare, zueinander senkrechte Schwingungen gleicher Frequenz ergeben Bahnkurven<br />
in Form einer Ellipse, deren Form von der relativen Phase zwischen beiden Schwingungen<br />
abhängt. Für verschiedene Frequenzen ergeben sich ebenfalls geschlossene Kurven, wenn ein<br />
rationales Frequenzverhältnis vorliegt. Für !1 >!2 schließt sich die Bahn nach einer Zeit<br />
t = T2 =2⇡/!2. LiegteinnichtrationalesVerhältnisvonFrequenzenvor,soschließtsichdie<br />
Bahn nicht (Beispiel in der letzten Bildzeile).<br />
Ω1<br />
���������� � 1�1<br />
Ω2<br />
Ω1<br />
���������� � 1�2<br />
Ω2<br />
Ω1<br />
���������� � 1�3<br />
Ω2<br />
Ω1<br />
���������� � 1�4<br />
Ω2<br />
Ω1<br />
���������� � 1.6129<br />
Ω2<br />
��0 ��45 ��90 ��135 ��180<br />
��0 ��45 ��90 ��135 ��180<br />
��0 ��45 ��90 ��135 ��180<br />
��0 ��45 ��90 ��135 ��180<br />
t�2Π t�4Π t�6Π t�8Π t�10Π
90 KAPITEL 8. MECHANISCHE SCHWINGUNGEN<br />
8.7 Fourier-Analyse<br />
Bei einer Überlagerung von Schwingungen mit rationalen Frequenzverhältnissen ergibt<br />
sich eine periodische Schwingung mit einer Periode des größten gemeinsamen Teilers aller<br />
beteiligten Frequenzen. In den folgenden Bilder überlagern wir zu cos !t<br />
2<br />
1<br />
0<br />
-1<br />
Teiler = 1ê5<br />
-2<br />
0 2 4 6 8<br />
time<br />
2<br />
1<br />
0<br />
-1<br />
Teiler = 1ê7<br />
-2<br />
0 2 4 6 8<br />
time<br />
2<br />
1<br />
0<br />
-1<br />
Teiler = 1ê1<br />
-2<br />
0 2 4 6 8<br />
time<br />
im Bild links mit cos 4<br />
5 !t,<br />
in Bildmitte mit cos 2<br />
7 !t,<br />
im Bild rechts mit cos 2!t.<br />
Umgekehrt lässt sich jede periodische Funktion f(t) = f(t + T ) immer in eine Summe<br />
von Sinus- oder Cosinus-Funktionen zerlegen, deren Frequenzen ganzzahlige Vielfache einer<br />
Grundfrequenz sind<br />
1X<br />
f(t) =a0 + an cos (n!1t + 'n) . (8.17)<br />
n=1<br />
Dabei nennt man an cos !1t die Grundschwingung und die Terme mit n>1 Oberschwingungen<br />
(in der Akustik: Grundton und Obertöne).<br />
Das Bild zeigt die Überlagerung der Grundschwingung sin !t mit 7 ungeradzahligen harmonischen<br />
Frequenzen, die jeweils mit der Amplitude 1/(2n 1) gewichtet sind<br />
mX 1<br />
f(t) =<br />
sin [(2n 1)!t] .<br />
sinHt wL + 2n 1<br />
(8.18)<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
sinH3 t wL + sinH5 t wL + sinH7 t wL + sinH9 t wL + sinH11 t wL + sinH13 t wL<br />
3 5 7 9 11 13<br />
f@tD<br />
n=1<br />
1.0<br />
0.5<br />
0.0<br />
-0.5<br />
-1.0<br />
-2 -1 0<br />
Zeit<br />
1 2<br />
f@wD<br />
2.00<br />
1.00<br />
0.50<br />
0.20<br />
0.10<br />
0.05<br />
0.02<br />
0 2 4 6 8 10 12 14<br />
harmonische<br />
Die Überlagerung (8.18) ist einer Rechteckschwingung ähnlich. Je mehr Frequenzen in der<br />
Summe (8.18) berücksichtigtwerdenumsoschärferwerdendieKantendesRechtecks.Das<br />
diskrete Frequenzspektrum f(!) dazu ist rechts gezeigt.<br />
Das nächste Bild zeigt die Überlagerung von 7 geradzahligen harmonischen Frequenzen,<br />
jeweils gewichtet mit der Amplitude 1/(2n) sind<br />
mX 1<br />
f(t) = sin [2n!t] . (8.19)<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
sinH2 t wL + sinH4<br />
2 4 2n t wL + sinH6 t wL + sinH8 t wL + sinH10 t wL + sinH12 t wL + sinH14 t wL<br />
6 8 10 12 14<br />
f@tD<br />
n=1<br />
1.0<br />
0.5<br />
0.0<br />
-0.5<br />
-1.0<br />
-2 -1 0<br />
Zeit<br />
1 2<br />
2.00<br />
1.00<br />
0.50<br />
f@wD<br />
0.20<br />
0.10<br />
0.05<br />
0.02<br />
0 2 4 6 8 10 12 14<br />
harmonische
8.7. FOURIER-ANALYSE 91<br />
So wie man durch geeignete Überlagerung von Sinus (oder Cosinus) Funktionen beliebige<br />
periodische Funktionen erzeugen kann, gelingt es umgekehrt eine beliebige periodische<br />
Funktion in Sinus (oder Cosinus) Funktionen zu zerlegen. Die Zerlegung einer periodischen<br />
Funktion in ihre harmonischen Anteile heißt Fourier-Zerlegung oder Fourier-Analyse.<br />
Ist die Ausgangsfunktion nicht periodisch sondern ein einmaliges Ereignis, wie z.B. ein<br />
Donnerschlag oder eine rechteckförmige Stufe, dann gelingt die Fourier-Transformation auch,<br />
allerdings genügt dann nicht eine Summe von diskreten Frequenzen wie in Gleichung<br />
8.18. Im Falle eines zeitlich begrenzten Ereignisses braucht man eine kontinuierliche Verteilung<br />
von Frequenzen zur Darstellung.<br />
Beispiel:<br />
Fourier-Zerlegung<br />
eines<br />
Rechteckpulses<br />
f�t�<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
0 10 20<br />
t<br />
f�Ν�<br />
8<br />
4<br />
0<br />
�4<br />
0 20 40 60 80<br />
Ν�1�t<br />
Beispiel: Frequenzanalyse einer gedämpften Schwingung.<br />
Wir untersuchen die gedämpfte Schwingung (siehe Seite 84) derEigenfrequenz!0 =5bei<br />
unterschiedlichen Dämpfungen. Wir sehen, dass die gedämpfte Schwingung nicht mehr harmonisch<br />
ist, die Bandbreite der Frequenzverteilung steigt mit zunehmender Dämpfung an,<br />
das Maximum der Fourier-Transformierten wandert zu kleiner Frequenzen.<br />
y@tD<br />
2<br />
1<br />
0<br />
-1<br />
g = 0.1<br />
w0 = 5<br />
v0 = 10<br />
0 1 2 3 4 5<br />
t HsL<br />
3.0<br />
2.5<br />
2.0<br />
fHwL 1.5<br />
1.0<br />
0.5<br />
0.0<br />
0 2 4 6 8 10 12<br />
frequency w<br />
1<br />
y@tD<br />
0<br />
g = 1<br />
w0 = 5<br />
v0 = 10<br />
0 1 2 3 4 5<br />
t HsL<br />
0.30<br />
0.25<br />
0.20<br />
fHwL 0.15<br />
0.10<br />
0.05<br />
0.00<br />
0 2 4 6 8 10 12<br />
frequency w<br />
y@tD<br />
fHwL 0.04<br />
g = 5<br />
w0 = 5<br />
v0 = 10<br />
0<br />
0 1 2 3 4 5<br />
t HsL<br />
0.08<br />
0.06<br />
0.02<br />
0.00<br />
0 2 4 6 8 10 12<br />
frequency w<br />
Die Fourier-Transformation schafft eine Verbindung zwischen der Verteilung einer Größe<br />
x und der Verteilung der inversen Größe 1/x. Zum Beispiel die Verbindung zwischen<br />
Frequenz und Zeit:<br />
f(t) und f(!) =f (2⇡⌫) .<br />
Die zeitliche Form der Größe f(t) wird abgebildet in das Spektrum von Frequenzen f(⌫),<br />
die überlagert werden müssen um die Größe f(t) darzustellen.<br />
Analog die Fouriertransformation zwischen Wellenlänge und Wellenzahl<br />
f( ) und f(k) =f (2⇡/ ) .<br />
Fourieranalyse von Stimmgabeln und Pfeifen.