

Deutsch - 2.6 MB - Aerotech GmbH
Deutsch - 2.6 MB - Aerotech GmbH
Deutsch - 2.6 MB - Aerotech GmbH

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
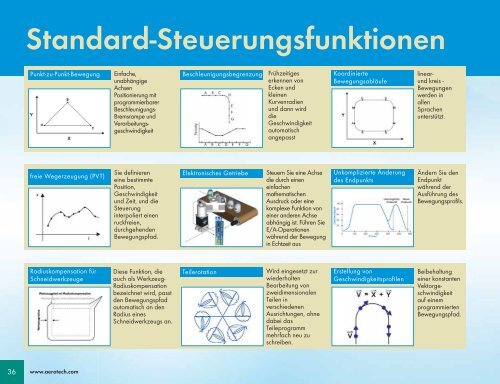
Standard-Steuerungsfunktionen<br />
Punkt-zu-Punkt-Bewegung Einfache,<br />
unabhängige<br />
Achsen<br />
Positionierung mit<br />
programmierbarer<br />
Beschleunigungs-<br />
Bremsrampe und<br />
Verarbeitungsgeschwindigkeit<br />
freie Wegerzeugung (PVT)<br />
Radiuskompensation für<br />
Schneidwerkzeuge<br />
36 www.aerotech.com<br />
Sie definieren<br />
eine bestimmte<br />
Position,<br />
Geschwindigkeit<br />
und Zeit, und die<br />
Steuerung<br />
interpoliert einen<br />
ruckfreien,<br />
durchgehenden<br />
Bewegungspfad.<br />
Diese Funktion, die<br />
auch als Werkzeug-<br />
Radiuskompensation<br />
bezeichnet wird, passt<br />
den Bewegungspfad<br />
automatisch an den<br />
Radius eines<br />
Schneidwerkzeugs an.<br />
Beschleunigungsbegrenzung<br />
Elektronisches Getriebe Steuern Sie eine Achse<br />
die durch einen<br />
einfachen<br />
mathematischen<br />
Ausdruck oder eine<br />
komplexe Funktion von<br />
einer anderen Achse<br />
abhängig ist. Führen Sie<br />
E/A-Operationen<br />
während der Bewegung<br />
in Echtzeit aus<br />
Teilerotation<br />
Frühzeitiges<br />
erkennen von<br />
Ecken und<br />
kleinen<br />
Kurvenradien<br />
und dann wird<br />
die<br />
Geschwindigkeit<br />
automatisch<br />
angepasst<br />
Wird eingesetzt zur<br />
wiederholten<br />
Bearbeitung von<br />
zweidimensionalen<br />
Teilen in<br />
verschiedenen<br />
Ausrichtungen, ohne<br />
dabei das<br />
Teileprogramm<br />
mehrfach neu zu<br />
schreiben.<br />
Koordinierte<br />
Bewegungsabläufe<br />
Unkomplizierte Änderung<br />
des Endpunkts<br />
Erstellung von<br />
Geschwindigkeitsprofilen<br />
linearund<br />
kreis -<br />
Bewegungen<br />
werden in<br />
allen<br />
Sprachen<br />
unterstützt.<br />
Ändern Sie den<br />
Endpunkt<br />
während der<br />
Ausführung des<br />
Bewegungsprofils.<br />
Beibehaltung<br />
einer konstanten<br />
Vektorgeschwindigkeit<br />
auf einem<br />
programmierten<br />
Bewegungspfad.