Swingachse – 7. und 8. Achse für Handlingsroboter (pdf - reiter-oft.de
Swingachse – 7. und 8. Achse für Handlingsroboter (pdf - reiter-oft.de
Swingachse – 7. und 8. Achse für Handlingsroboter (pdf - reiter-oft.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
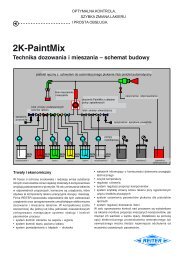
BESSERE LÖSUNGEN SIND DIE SUMME ÜBERZEUGENDER DETAILS.<br />
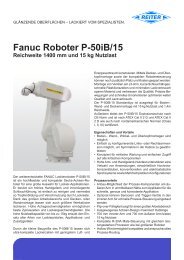
<strong>Swingachse</strong>n <strong>für</strong> Roboter<br />
<strong>7.</strong> <strong>und</strong> <strong>8.</strong> <strong>Achse</strong> <strong>für</strong> Handlings-Roboter<br />
Durch die Verwendung <strong>de</strong>r doppelten Schwenkachse wird<br />
<strong>de</strong>r Einsatzbereich <strong>de</strong>s 6-achsigen Roboter wesentlich<br />
erweitert.<br />
Für die Bewegung <strong>de</strong>s Roboters steht mit <strong>de</strong>r doppelten<br />
Schwenkachse eine <strong>7.</strong> <strong>und</strong> eine weitere <strong>8.</strong> <strong>Achse</strong> zur<br />
Verfügung.<br />
Mit großer Wie<strong>de</strong>rholgenauigkeit kann <strong>de</strong>r Roboter je<strong>de</strong>n<br />
Punkt innerhalb eines <strong>de</strong>finierten Radius erreichen o<strong>de</strong>r<br />
in eine <strong>de</strong>finierte Ruheposition schwenken; so können<br />
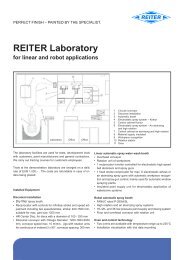
spe zielle Anwendungen im Lackier- <strong>und</strong> Handlingbereich<br />
sowie Schweißarbeiten abge<strong>de</strong>ckt wer<strong>de</strong>n.<br />
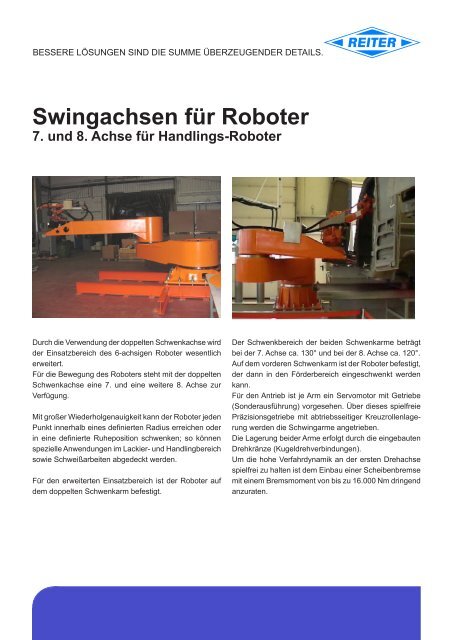
Für <strong>de</strong>n erweiterten Einsatzbereich ist <strong>de</strong>r Roboter auf<br />
<strong>de</strong>m doppelten Schwenkarm befestigt.<br />
Der Schwenkbereich <strong>de</strong>r bei<strong>de</strong>n Schwenkarme beträgt<br />
bei <strong>de</strong>r <strong>7.</strong> <strong>Achse</strong> ca. 130° <strong>und</strong> bei <strong>de</strong>r <strong>8.</strong> <strong>Achse</strong> ca. 120°.<br />
Auf <strong>de</strong>m vor<strong>de</strong>ren Schwenkarm ist <strong>de</strong>r Roboter befestigt,<br />
<strong>de</strong>r dann in <strong>de</strong>n För<strong>de</strong>rbereich eingeschwenkt wer<strong>de</strong>n<br />
kann.<br />
Für <strong>de</strong>n Antrieb ist je Arm ein Servomotor mit Getriebe<br />
(Son<strong>de</strong>rausführung) vorgesehen. Über dieses spielfreie<br />
Präzisionsgetriebe mit abtriebsseitiger Kreuzrollenlagerung<br />
wer<strong>de</strong>n die Schwingarme angetrieben.<br />
Die Lagerung bei<strong>de</strong>r Arme erfolgt durch die eingebauten<br />
Drehkränze (Kugeldrehverbindungen).<br />
Um die hohe Verfahrdynamik an <strong>de</strong>r ersten Drehachse<br />
spielfrei zu halten ist <strong>de</strong>m Einbau einer Scheibenbremse<br />
mit einem Bremsmoment von bis zu 16.000 Nm dringend<br />
anzuraten.
BESSERE LÖSUNGEN SIND DIE SUMME ÜBERZEUGENDER DETAILS.<br />
REITER GmbH + Co. KG Oberflächentechnik<br />
Berglenstraße 23 - 25 Tel.: +49 (0) 71 95 / 185 - 0 Email: info@<strong>reiter</strong>-<strong>oft</strong>.<strong>de</strong><br />
D-71364 Winnen<strong>de</strong>n Fax: +49 (0) 71 95 / 185 - 30 Internet: www.<strong>reiter</strong>-<strong>oft</strong>.<strong>de</strong> P1502-04<strong>de</strong> 10/12 - 1