Fahrwerkentwicklungen an ika und fka Chassis development at ika ...
Fahrwerkentwicklungen an ika und fka Chassis development at ika ...
Fahrwerkentwicklungen an ika und fka Chassis development at ika ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Tag des Fahrwerks 2004 1<br />
<strong>Fahrwerkentwicklungen</strong> <strong>an</strong> <strong>ika</strong> <strong>und</strong> <strong>fka</strong><br />
<strong>Chassis</strong> <strong>development</strong> <strong>at</strong> <strong>ika</strong> <strong>an</strong>d <strong>fka</strong><br />
Dipl.-Ing. Thomas Schrüllkamp, Forschungsgesellschaft Aachen mbh, Aachen<br />
Zusammenfassung<br />
Die Fahrwerkentwicklung geht stetig vor<strong>an</strong> <strong>und</strong> unterliegt Treibern wie der<br />
Globalisierung <strong>und</strong> den Marktforderungen durch K<strong>und</strong>en sowie Gesetzgebern. Die<br />
technischen Erneuerungen im Fahrwerk sind maßgeblich von elektronischen Komponenten<br />
abhängig. Die Komplexitäts- <strong>und</strong> Integr<strong>at</strong>ionsgrad neuer Fahrwerksysteme ist<br />
hierbei sehr hoch. Die alleinige Betrachtung der Systeme ist jedoch nicht ausreichend.<br />
Vielmehr müssen die Funktionen im Zusammenspiel der Systeme unter<br />
Berücksichtigung der eingesetzten Achstypen entwickelt werden. Dies h<strong>at</strong> auch<br />
Auswirkungen auf die Entwicklungs<strong>an</strong>forderungen <strong>an</strong> Hochschulen <strong>und</strong> Forschungsinstituten.<br />
In diesem Beitrag sind hierzu aktuelle Forschungsbeispiele aus dem Bereich Fahrwerk<br />
<strong>an</strong> <strong>ika</strong> <strong>und</strong> <strong>fka</strong> vorgestellt. Dies sind u.a die Möglichkeiten der Reifenuntersuchungen<br />
ausgehend von der Messung bis hin zum validierten Tyre-Property-<br />
File <strong>und</strong> einem vereinfachten phys<strong>ika</strong>lischen Reifenmodell.<br />
Zudem sind gesamtheitliche Untersuchungen zu Achskomponenten dargestellt.<br />
Focus liegt auf der Prüfung von Kugelgelenken, wobei ein neuartiges Prüfst<strong>an</strong>dskonzept<br />
entwickelt <strong>und</strong> realisiert wurde.<br />
Abschließend wird das eigens entwickelte Achsberechnungstool ABE vorgestellt.<br />
ABE zeichnet sich als kompaktes <strong>und</strong> einfach zu bedienendes sowie exakt<br />
rechnendes Starrkinem<strong>at</strong><strong>ika</strong>uslegungstool aus. Auf Basis der m<strong>at</strong>hem<strong>at</strong>ischen<br />
Zusammenhänge für die allgemeinen Moment<strong>an</strong>schraubung für Radaufhängungen<br />
nach M<strong>at</strong>schinsky ist das Berechnungsprogramm für Mehrlenkerachsen (auch<br />
aufgelöste Lenker) entst<strong>an</strong>den. Insbesondere durch die Verwendung der Visual<br />
Basic Applic<strong>at</strong>ion (VBA) – Programmierung unter MS-Excel steht ein ideales Tool für<br />
die Achsauslegung <strong>und</strong> die Achsvari<strong>an</strong>tenuntersuchung von bis zu 10 Achsen zur<br />
Verfügung.<br />
1 Anforderungen <strong>an</strong> Fahrzeuge <strong>und</strong> Systeme<br />
1.1 Sicherheit <strong>und</strong> Komfort<br />
Das Menschenleben <strong>und</strong> der Schutz der Umwelt sind die bedeutendsten Güter<br />
heutiger Zeit. Um so höher ist die Ver<strong>an</strong>twortung <strong>und</strong> die Verpflichtung heutiger<br />
Forschungs- <strong>und</strong> Entwicklungsinstitute innov<strong>at</strong>ive Beiträge für eine Sicherheitssteigerung<br />
zu leisten. Im Bereich der Fahrzeugentwicklung leisten <strong>ika</strong> <strong>und</strong> <strong>fka</strong> in<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 2<br />
n<strong>at</strong>ionalen <strong>und</strong> europäischen Projekten einen wesentlichen Beitrag für mehr<br />
Fahrsicherheit <strong>und</strong> Fahrkomfort.<br />
Entscheidend für den Erfolg einer Technologie ist die Erfüllung der Anforderungen<br />
hinsichtlich Funktion <strong>und</strong> Wirtschaftlichkeit unter Einhaltung der gesetzlichen<br />
Rahmenbedingungen (Abb. 1-1). Dies gilt insbesondere vor dem Hintergr<strong>und</strong> der<br />
gestiegenen Anforderung <strong>an</strong> das Fahrzeug <strong>und</strong> die Systeme.<br />
Hersteller / OEM<br />
(Ergebnisorientiert)<br />
Zulieferer<br />
(Ergebnisorientiert)<br />
K<strong>und</strong>enforderungen<br />
(z.B. Nutzen, Emotion, Image)<br />
Gesetzgeber<br />
(z.B. Umwelt- <strong>und</strong><br />
Sicherheits<strong>an</strong>forderungen)<br />
Abb. 1-1: Die Technologie-Entwicklung unterliegt vielfältigen Einflussfaktoren<br />
Ein Treiber für Technologieentwicklung ist der Gesetzgeber. So wirken sich<br />
Gesetzgebung im Bereich der Sicherheit positiv auf die Anzahl der Getöteten im<br />
Straßenverkehr aus (Abb. 1-2). Jedoch nimmt die Anzahl der Unfälle stetig zu.<br />
Unfälle gesamt / Verletzte<br />
2.500.000<br />
2.000.000<br />
1.500.000<br />
1.000.000<br />
500.000<br />
0<br />
1953<br />
Unfälle gesamt<br />
Verletzte<br />
Getötete<br />
ab 1991: gesamtes B<strong>und</strong>esgebiet<br />
Anschnallpflicht<br />
1955<br />
1957<br />
1959<br />
1961<br />
1963<br />
1965<br />
1967<br />
1969<br />
1971<br />
1973<br />
1975<br />
Gurt vorne<br />
1983<br />
1985<br />
1987<br />
1989<br />
1991<br />
1993<br />
1995<br />
1997<br />
1999<br />
2001<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
1977<br />
1979<br />
Jahr<br />
Ölkrise<br />
Verwarnungsgeld<br />
Abb. 1-2: Sicherheit getrieben durch den Gesetzgeber<br />
1981<br />
Gurt hinten<br />
Verwarnungsgeld<br />
Wiedervereinigung<br />
2003<br />
25.000<br />
20.000<br />
15.000<br />
10.000<br />
5.000<br />
0<br />
Getötete<br />
Quelle: St<strong>at</strong>istisches B<strong>und</strong>esamt
Tag des Fahrwerks 2004 3<br />
Die Analyse von Verkehrsunfällen zeigt, dass eine Vielzahl der Unfälle mit<br />
Personenschaden (28 %) ohne vorherigen Konflikt mit <strong>an</strong>deren Verkehrsteilnehmern<br />
geschieht. Nur durch den Verlust der Kontrolle über das Fahrzeug <strong>und</strong> <strong>an</strong>schließender<br />
Kollision mit einem <strong>an</strong>deren Pkw werden diese Unfälle verursacht. 60 % aller<br />
Unfälle mit tödlichem Ausg<strong>an</strong>g sind auf Schleudervorgänge infolge überhöhter<br />
Geschwindigkeit, Fahrfehlern oder überzogenen Lenkreaktionen zurückzuführen.<br />
Dies bedeutet, dass auf dem Weg zum unfallfreien Fahren technische Erneuerung im<br />
Fahrzeug unabdingbar sind.<br />
hoch<br />
Sicherheitspotential<br />
Deform<strong>at</strong>ionselemente<br />
Verb<strong>und</strong>glas<br />
Seitenaufprallschutz<br />
Airbag<br />
Sicherheitsgurt<br />
Sicherheitszelle<br />
ABS<br />
Seitenairbag<br />
ASR<br />
Unterflurkonzept<br />
ESP ESP<br />
AFS<br />
Umfelderkennung<br />
1950 1960 1970 1980 1990 2000 2010 2020 2030 2040 2050<br />
Abb. 1-3: Sicherheitspotential aktiver Fahrwerksystem<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
Notbremsfunktion<br />
Autom<strong>at</strong>ische Querführung<br />
Autom<strong>at</strong>ische Fahrt<br />
Passive<br />
Sicherheit<br />
Aktive<br />
Sicherheit<br />
Die Schlüsselfaktoren für die Stärkung der Sicherheit im Straßenverkehr sind nicht<br />
nur technische Neuerungen, sondern viel mehr die konsequente Einbeziehung des<br />
Fahrers in den Entwicklungsprozess. Das Zusammenspiel von Mensch, Fahrzeug<br />
<strong>und</strong> Umwelt ist hier entscheidend <strong>und</strong> mittels aktiver Fahrwerktechnik können<br />
unfallvorbeugende Maßnahmen umgesetzt werden.<br />
Neben den sicherheitsrelev<strong>an</strong>ten Themen werden aber auch komfortrelev<strong>an</strong>te Anforderungen<br />
(Abb. 1-4) <strong>an</strong> technische Neuerungen in Fahrzeugen gestellt.<br />
Umweltfre<strong>und</strong>lichkeit<br />
Wirtschaftlichkeit<br />
Gebrauchstüchtigkeit<br />
Tr<strong>an</strong>sportleistung<br />
Antrieb<br />
Passive<br />
Sicherheit<br />
Fahrwerk<br />
Fahrzeugauslegung<br />
Karosserie<br />
Fahrzeugübergreifende<br />
Subsysteme<br />
Ressourcenschonung<br />
Qualität <strong>und</strong><br />
Zuverlässigkeit<br />
Komfort<br />
Aktive<br />
Sicherheit<br />
Beispiele für<br />
Zielkonflikte
Tag des Fahrwerks 2004 4<br />
Abb. 1-4: Zielsystem zu Anforderungen <strong>an</strong> Fahrzeuge <strong>und</strong> die Systeme<br />
Alle Anforderungen können in einem Zielsystem zusammengefasst werden. Die<br />
Komplexität <strong>und</strong> die Zielkonflikte werden in diesem Schaubild verdeutlicht.<br />
1.2 Betrachtung des Marktes <strong>und</strong> heutiger Entwicklungen im Fahrwerk<br />
Zu den technischen Anforderungen <strong>an</strong> das Fahrzeug ergeben sich aufgr<strong>und</strong> des<br />
intern<strong>at</strong>ionalen Marktes (Abb. 1-5) weitere R<strong>an</strong>dbedingungen, die bei der Entwicklung<br />
von Fahrzeugen berücksichtigt werden müssen.<br />
Abnahme der unabhängigen<br />
Fahrzeughersteller<br />
Abarth<br />
Alfa -Romeo<br />
Alpine<br />
Aston-Martin<br />
BMW<br />
Chrysler<br />
Citroen<br />
Daimler-Benz<br />
de Tomaso<br />
Fi<strong>at</strong><br />
Ford<br />
Fuji H.I.<br />
GM<br />
Honda<br />
Innocenti<br />
1960<br />
Isuzu<br />
Lamborghini<br />
Lotus<br />
Maser<strong>at</strong>i<br />
Mazda<br />
Mitsubishi<br />
Niss<strong>an</strong><br />
Peugeot<br />
Porsche<br />
Renault<br />
Rolls R.<br />
Saab<br />
Se<strong>at</strong><br />
Simca<br />
Suzuki<br />
Toyota<br />
Volvo<br />
VW<br />
Prince Zudem:<br />
Limousine<br />
Sportwagen<br />
Spider<br />
1980<br />
Zunahme der Fahrzeugk<strong>at</strong>egorien<br />
BMW<br />
DC<br />
Ford<br />
GM/Fi<strong>at</strong><br />
Honda<br />
PSA<br />
Porsche<br />
Renault<br />
Rover<br />
Toyota<br />
VW<br />
K<strong>und</strong>enwünsche erfordern stetig zunehmenden<br />
Ausst<strong>at</strong>tungsgrad der Fahrzeuge<br />
2020<br />
2000 Pick-up<br />
Geländewagen<br />
SUV<br />
MPV/V<strong>an</strong><br />
MPV<br />
Miniv<strong>an</strong><br />
Fließheck<br />
Microv<strong>an</strong><br />
Kombi<br />
Kombi<br />
Limousine<br />
Limousine<br />
Kompaktwagen<br />
Kompaktwagen<br />
Sportwagen<br />
Sportwagen<br />
Coupé<br />
Coupé<br />
Cabriolet<br />
Cabriolet<br />
Roadster<br />
Hybridautos<br />
Elekrofahrzeuge<br />
Abb. 1-5: Betrachtung der Fahrzeughersteller <strong>und</strong> der Fahrzeugk<strong>at</strong>egorien<br />
Die Anzahl der unabhängigen Fahrzeughersteller nimmt stetig ab. Umgekehrt h<strong>at</strong><br />
sich die Anzahl der Fahrzeugk<strong>at</strong>egorien deutlich erhöht. Vor dem Hintergr<strong>und</strong> der<br />
fortschreitenden Globalisierung in Fertigung, Vertrieb <strong>und</strong> Entwicklung führt dies zu<br />
modellvari<strong>an</strong>tenverkürzten Produktlebenszyklen bei kontinuierlich steigendem Innov<strong>at</strong>ionsgrad.<br />
Zudem führt die K<strong>und</strong>enforderung nach einer “Fahrzeug-Individualisierung” zu einer<br />
Vielfalt <strong>und</strong> großem Umf<strong>an</strong>g der Fahrzeugausst<strong>at</strong>tungen bei erhöhter Komplexität<br />
<strong>und</strong> steigendem Kostendruck.<br />
Die Automobilhersteller sind diesen Anforderungen mit technischen Lösungen nachgekommen<br />
<strong>und</strong> haben eine Vielzahl neuer Entwicklungen im Markt pl<strong>at</strong>ziert. Eine<br />
Übersicht für die fahrwerkspezifischen Systeme, wie Reifen, Bremse, Lenkung,<br />
Feder/Dämpfer <strong>und</strong> Stabilis<strong>at</strong>or sowie Fahrdynamikregelsystemen ist in Abb. 1-6<br />
dargestellt.<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 5<br />
Fahrdynamikregler:<br />
vom DSC zum ESP <strong>und</strong> IVDC<br />
Lenkung:<br />
von mech<strong>an</strong>. Lenkung über Speicherlenkungzu<br />
Elektrolenkung, Aktivlenkung zu Steer-by-Wire<br />
Federung:<br />
von der Stahlfederung über hydropneum<strong>at</strong>ische<br />
Federung <strong>und</strong> Luftfederung<br />
zur Aktiven Federung<br />
Reifen:<br />
vom Notlaufreifen über das Conti<br />
Reifen System zu PAX <strong>und</strong> Run-Fl<strong>at</strong><br />
Systemen<br />
Dämpfer:<br />
vom Einrohrdämpfer zum stufenlos variabel<br />
verstellbaren Dämpfersystemen<br />
Bremse:<br />
von der hydr. Bremse über den Bremsassistenten<br />
zur Elektro-Hydr. <strong>und</strong> Elektro-<br />
Mech<strong>an</strong>. Bremse<br />
Abb. 1-6: Entwicklungen im Bereich Fahrwerk<br />
Achssysteme:<br />
Überg<strong>an</strong>g zu Multi-Link-Leichtbau-<br />
Achsen im M<strong>at</strong>erialmix<br />
Stabils<strong>at</strong>or:<br />
von mech<strong>an</strong>. Stabi zu<br />
hydraulischen aktiven Stabilis<strong>at</strong>or<br />
Die technischen Entwicklungen dieser Fahrwerksysteme sind im wesentlichen durch<br />
den Eins<strong>at</strong>z elektronischen Komponenten getrieben. Die Leistungsfähigkeit hängt in<br />
starkem Maße von den elektronischen Regelsystemen ab. Dies führt zu komplexen<br />
Systemen, die neben den Ch<strong>an</strong>cen zusätzlicher Funktionen auch Risiken in der<br />
Ausfallsicherheit haben. Dies zeigen nicht zuletzt aufwendige Rückrufaktionen, die<br />
sich in den letzten 10 Jahren verdoppelt haben.<br />
Die Betrachtung des Marktes zeigt aber auch die stetige Weiterentwicklung von<br />
Achssystemen. Ausgehend von Verb<strong>und</strong>lenkerachsen werden zunehmend<br />
Leichtbau-Achsen eingesetzt. Eine Unterteilung der Fahrzeugk<strong>at</strong>egorien in Klassen<br />
ist in Abb. 1-7 <strong>und</strong> Unterscheidung der Achstypen ist in Abb. 1-8 dargestellt.<br />
Luxus-/<br />
Oberklasse<br />
(LOK):<br />
Obere Mittel-/<br />
Mittelklasse<br />
(OMK):<br />
Kompaktklasse<br />
(KK):<br />
Subkompakt-/<br />
Kleinwagenklasse<br />
(SKK):<br />
Doppelquerlenker<br />
jedoch mit geteiltem unteren<br />
Dreieckslenker<br />
jedoch mit geteiltem unteren <strong>und</strong><br />
oberen Dreieckslenker<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
VA<br />
Bez.<br />
McPh<br />
McPh2L<br />
DQ<br />
DQ3L<br />
DQ4L<br />
Achstyp<br />
McPherson<br />
McPherson<br />
Doppelquerlenker<br />
Doppelquerlenker<br />
SA Starrachsen<br />
VL<br />
LL<br />
SL<br />
McPh2L<br />
3L<br />
4L<br />
5L<br />
Verb<strong>und</strong>lenker<br />
Längslenker<br />
Schräglenker<br />
McPherson<br />
Achsen mit<br />
3 Lenkern<br />
Achsen mit<br />
4 Lenkern<br />
Achsen mit<br />
5 Lenkern<br />
Anz.<br />
Lenker<br />
1<br />
2<br />
2<br />
3<br />
4<br />
1<br />
1<br />
1<br />
2<br />
3<br />
4 (3)<br />
5<br />
Bemerkung<br />
incl. Vari<strong>an</strong>te Smart:<br />
Dämpferbein mit unterem<br />
Dreieckslenker <strong>und</strong><br />
Querbl<strong>at</strong>tfeder<br />
jedoch mit geteiltem unteren<br />
Dreieckslenker<br />
incl. DeDion-Achse<br />
incl. ähnlicher Typen:<br />
Koppellenkachse, Parabelachse<br />
Federbeinachsen (Porsche<br />
Boxster)<br />
z. B. Zentrallenkerachse BMW<br />
z. B. Integrallenkerachse,<br />
Trapezlenker, Schwertlenkerachse,<br />
auch Multilink<br />
z. B. Raumlenkerachse<br />
Abb. 1-7: Einteilung nach Fahrzeugklassen <strong>und</strong> Achstypen für Vorder- / Hinterachsen
Tag des Fahrwerks 2004 6<br />
100%<br />
90%<br />
80%<br />
70%<br />
60%<br />
50%<br />
40%<br />
30%<br />
20%<br />
10%<br />
0%<br />
100%<br />
90%<br />
80%<br />
70%<br />
60%<br />
50%<br />
40%<br />
30%<br />
20%<br />
10%<br />
0%<br />
Markt<strong>an</strong>teil der Vorderachstypen<br />
(Neuzulassungen 2001)<br />
SKK KK OMK LOK<br />
Markt<strong>an</strong>teil der Vorderachstypen<br />
(geschätzte Neuzulassungen 2004)<br />
SKK KK OMK LOK<br />
DQ4L<br />
DQ3L<br />
DQ<br />
McPh2L<br />
McPh<br />
DQ4L<br />
DQ3L<br />
DQ<br />
McPh2L<br />
McPh<br />
Markt<strong>an</strong>teil der Hinterachstypen<br />
(Neuzulassungen 2001)<br />
22 ©<br />
SKK KK OMK LOK<br />
4ts0825.ppt<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
100%<br />
90%<br />
80%<br />
70%<br />
60%<br />
50%<br />
40%<br />
30%<br />
20%<br />
10%<br />
0%<br />
SKK KK OMK LOK<br />
Markt<strong>an</strong>teil der Hinterachstypen<br />
(geschätzte Neuzulassungen 2004)<br />
Abb. 1-8: Analyse von Vorder- <strong>und</strong> Hinterachsbauarten nach Fahrzeugklasse<br />
(Neuzulassungen Deutschl<strong>an</strong>d, Quelle KBA)<br />
Die Grafiken zeigen, dass die Vorderachsbauarten nach Fahrzeugk<strong>at</strong>egorie nahezu<br />
unverändert im Zeitraum von 2001 bis 2004 geblieben sind. Aufwendige Mehrlenkerachsen<br />
werden nur in den Oberklassefahrzeugen eingesetzt. In der Sub- <strong>und</strong><br />
Kompaktklasse werden nahezu vollständig McPherson-Federbein verbaut.<br />
Bei den Hinterachsen hingegen ist ein deutlicher Trend hin zu Mehrlenkerachsen<br />
festzustellen. So werden bereits in der Kompaktklasse eine Vielzahl von 3-Lenker-<br />
Achsen verbaut. Dies sind die Markt<strong>an</strong>teile von VW Golf, Audi A3 <strong>und</strong> zu erwartende<br />
Stückzahlen des im Herbst 2004 erscheinenden BMW 1er mit 5-Lenker Hinterachse.<br />
Interess<strong>an</strong>t ist auch eine Analyse der verbauten Achssysteme nach Herstellern. Die<br />
Neuzulassungen <strong>und</strong> die Verwendung der Achstypen nach Hersteller ist in Abb. 1-9<br />
gezeigt. Auffällig ist hier, dass Opel <strong>und</strong> Ford bisl<strong>an</strong>g nur McPherson-Achsen in den<br />
aktuellen Modellen als Vorderachse einsetzen.<br />
Bei den Hinterachsen ist insbesondere ein hoher Anteil von Verb<strong>und</strong>lenkerachsen<br />
bei Opel im Vergleich zu Audi <strong>und</strong> VW festzustellen. Der direkte Vergleich von Opel<br />
Astra mit Verb<strong>und</strong>lenkerachse <strong>und</strong> dem VW Golf V mit Mehrlenkerachse spiegelt<br />
sich hier wieder. Die Fahreigenschaften dieser beiden Fahrzeuge wurden in der<br />
Fachpresse heftig diskutiert.<br />
Insgesamt zeigt sich bei der Analyse von technischen Entwicklungen der<br />
Achssysteme, dass die Gr<strong>und</strong>konzeption der Fahrwerke nach wie vor einen sehr<br />
hohen Stellenwert besitzt.<br />
100%<br />
90%<br />
80%<br />
70%<br />
60%<br />
50%<br />
40%<br />
30%<br />
20%<br />
10%<br />
0%<br />
5L<br />
4L<br />
3L<br />
McPh2L<br />
SL<br />
LL<br />
VL<br />
SA<br />
5L<br />
4L<br />
3L<br />
McPh2L<br />
SL<br />
LL<br />
VL<br />
SA
Tag des Fahrwerks 2004 7<br />
500.000<br />
450.000<br />
400.000<br />
350.000<br />
300.000<br />
250.000<br />
200.000<br />
150.000<br />
100.000<br />
50.000<br />
0<br />
300.000<br />
250.000<br />
200.000<br />
150.000<br />
100.000<br />
50.000<br />
0<br />
Vorderachstypen nach Hersteller<br />
(geschätzte Neuzulassungen 2004)<br />
Audi<br />
BMW<br />
Ford<br />
MB<br />
MCC<br />
Opel<br />
Porsche<br />
Hinterachstypen nach Hersteller<br />
(geschätzte Neuzulassunge 2004)<br />
Audi<br />
BMW<br />
Ford<br />
MB<br />
MCC<br />
Opel<br />
Porsche<br />
VW<br />
VW<br />
McPh<br />
McPh2L<br />
DQ<br />
DQ3L<br />
DQ4L<br />
22 ©<br />
SA<br />
VL<br />
LL<br />
SL<br />
McPh2L<br />
3L<br />
4L<br />
5L<br />
Verwendung Hinterachstyp bei Hersteller<br />
(geschätzte Neuzulassungen 2004)<br />
4ts0825.ppt<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
100%<br />
90%<br />
80%<br />
70%<br />
60%<br />
50%<br />
40%<br />
30%<br />
20%<br />
10%<br />
0%<br />
100%<br />
90%<br />
80%<br />
70%<br />
60%<br />
50%<br />
40%<br />
30%<br />
20%<br />
10%<br />
0%<br />
Verwendung Vorderachstyp bei Hersteller<br />
(geschätzte Neuzulassungen 2004)<br />
Audi<br />
BMW<br />
Ford<br />
MB<br />
MCC<br />
Opel<br />
Porsche<br />
Audi<br />
BMW<br />
Ford<br />
MB<br />
MCC<br />
Opel<br />
Porsche<br />
VW<br />
VW<br />
DQ4L<br />
DQ3L<br />
DQ<br />
McPh2L<br />
McPh<br />
5L<br />
4L<br />
3L<br />
McPh2L<br />
SL<br />
LL<br />
VL<br />
SA<br />
Abb. 1-9: Analyse der Vorder- <strong>und</strong> Hinterachsbauarten nach OEM (Neuzulassungen<br />
Deutschl<strong>an</strong>d, Quelle KBA)<br />
Eine alleinige Konzentr<strong>at</strong>ion auf den Eins<strong>at</strong>z von elektronischen Systemen im<br />
Fahrwerk ist nicht ausreichend. Fahrwerkfunktionen werden zwar derzeit maßgeblich<br />
durch elektronische Systeme bestimmt, jedoch geht dies nur bei einer stimmigen<br />
Gr<strong>und</strong>funktion des passiven Fahrwerks.<br />
Diese Aspekte für die Fahrwerkentwicklung können in einem Zwischenfazit<br />
zusammengefasst werden (Abb. 1-10):<br />
Die Anforderungen <strong>an</strong> Fahrzeuge <strong>und</strong> Systeme steigen stetig.<br />
Treiber sind zunehmende K<strong>und</strong>enerwartungen <strong>und</strong> Fahrzeug-Individualisierung<br />
bei erhöhter Komplexität <strong>und</strong> steigendem Kostendruck.<br />
Technische Innov<strong>at</strong>ionen im Fahrwerk sind von elektronischen Systemen<br />
getrieben, aber auch Überg<strong>an</strong>g zu komplexen Mehrlenkerachsen auch in der<br />
Kompaktklasse.<br />
Funktionen sind entscheidend, nicht nur technische Erneuerungen der Systeme<br />
Betrachtung von einzelnen Fahrwerksystemen ist nicht ausreichend, das<br />
Zusammenwirken ist für den Erfolg bedeutend.<br />
Mit verschiedenen Systemen können gleiche Funktionen dargestellt werden.<br />
Welche Funktionen werden zukünftig vom K<strong>und</strong>en gewünscht?<br />
Welche Funktionen lassen sich wie beeinflussen?<br />
Welche Rolle spielen hierbei Hochschulen <strong>und</strong> Entwicklungsdienstleister?<br />
Abb. 1-10: Zwischenfazit
Tag des Fahrwerks 2004 8<br />
1.3 Betrachtung heutiger <strong>und</strong> zukünftiger Fahrwerkfunktionen<br />
Wie zuvor beschrieben, ist die Betrachtung der einzelnen Systeme nicht<br />
ausreichend. Vielmehr müssen zunächst die Fahrwerkfunktionen in Abhängigkeit von<br />
Zeithorizont <strong>und</strong> Anwendungsgebiet näher untersucht werden.<br />
Eine Übersicht der heutigen <strong>und</strong> denkbarer Funktionserweiterungen zeigt Abb. 1-11.<br />
Eine Unterteilung der Funktionen in die Bewegungsrichtung des Fahrzeugs erscheint<br />
im ersten Schritt sinnvoll.<br />
26<br />
Funktionen heute<br />
Längsdynamik:<br />
Schlupfregelung (ABS/ASR)<br />
Hillholder<br />
Bremsassistent<br />
Adaptive Bremskraftverteilung<br />
Querdynamik:<br />
Fahrstabilisierung (ESP/DSC)<br />
Variable Lenkübersetzung<br />
W<strong>an</strong>kausgleich<br />
(ABC, aktiver Stabilis<strong>at</strong>or)<br />
Parkassistent (Lenkmomentregelung)<br />
Vert<strong>ika</strong>ldynamik:<br />
Niveauregulierung<br />
Variable Dämpfung<br />
Variable Federung<br />
Reifendruckkontrolle<br />
Abb. 1-11: Heutige <strong>und</strong> zukünftige Fahrwerkfunktionen<br />
Funktionserweiterungen<br />
Längsdynamik:<br />
Nickausgleich<br />
Nutzbremsung<br />
Querdynamik:<br />
W<strong>an</strong>kausgleich<br />
Seitenwindkompens<strong>at</strong>ion (Störkompens<strong>at</strong>ion)<br />
Autom<strong>at</strong>isches Parken<br />
Autom<strong>at</strong>ischer Spurwechsel<br />
Spurassistent<br />
Vert<strong>ika</strong>ldynamik:<br />
Regelung Aufbaubewegung<br />
Funktionsvernetzung<br />
Fahrstabilisierung (Vernetzung von Brems<strong>und</strong><br />
Lenkeingriff mit Reibwertsensierung)<br />
„30m-Bremsweg-Auto“; µ-Split-Bremsung<br />
Autonomes Fahren<br />
Abst<strong>an</strong>dsregelsysteme (ACC)<br />
Fahrer-Assistenzsysteme<br />
Für die weitergehende Betrachtung sind in den folgenden Abbildungen die möglichen<br />
Funktionen in verschiedenen Abhängigkeiten aufgetragen. Der Zusammenh<strong>an</strong>g von<br />
Zeithorizont ist über die vert<strong>ika</strong>le Achse ablesbar. Die Zuordnung zu den Bewegungsrichtungen<br />
ist auf der horizontalen Achse aufgetragen.<br />
Die Abbildungen zeigen zusätzlich die Beeinflussungsmöglichkeiten <strong>und</strong> Vernetzungen<br />
von Fahrwerksystemen. Dies sind in Abb. 1-12 die Beeinflussung durch die<br />
Bremse, in Abb. 1-13 durch Lenkung, in Abb. 1-14 durch Feder-/Dämpfer <strong>und</strong> in Abb.<br />
1-15 durch Stabilis<strong>at</strong>orsysteme.<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 9<br />
Beeinflussung durch Lenkungen<br />
Beeinflussung durch Bremse<br />
Nutzbremsung<br />
Rückwärtsfahrassistent<br />
Hängerbetrieb<br />
Autom<strong>at</strong>isches<br />
Parken<br />
Voll aktives<br />
Fahrwerk<br />
Beeinflussung durch Feder/Dämpfer<br />
Spurrillenkompens<strong>at</strong>ion<br />
Kurvenneigung<br />
Beeinflussung Stabilis<strong>at</strong>or<br />
L<strong>an</strong>gfristig<br />
> 10 Jahre<br />
mittelfristig<br />
5 - 10 Jahre<br />
Beeinflussung<br />
Nickausgleich<br />
Eigenlenkverhalten<br />
Seitenwind<br />
Wendekreidreduktion<br />
Agilität<br />
kompens<strong>at</strong>ion<br />
Soft-Stop<br />
Fadingassistent<br />
µ-Split<br />
Radlastverschiebung<br />
Bremsung<br />
Kompens<strong>at</strong>ion<br />
Regenassistent<br />
Parkassistent<br />
Lenkmomentenregelung<br />
(unterstützend) W<strong>an</strong>kausgleich<br />
Elektronische<br />
Roll-Over<br />
Hill descent<br />
Kurvenbrems-<br />
Anhänger<br />
Bremskraftverteilung<br />
control<br />
kontrolle<br />
Stabilisierung<br />
Stabilisierung<br />
kurzfristig<br />
-5 Jahre<br />
Niveauregulierung<br />
Hillholder<br />
Bremsassistent MSR<br />
ASR ABS EDS<br />
Variable<br />
Lenkübersetzung ESP<br />
Adaptives<br />
Kurvenlicht<br />
heute Reifendruckkontrolle<br />
Regelung<br />
Aufbaudynamik<br />
(ABC)<br />
Variable<br />
Federung<br />
Variable<br />
Dämpfung<br />
Längsdynamik Querdynamik Vert<strong>ika</strong>ldynamik<br />
Abb. 1-12: Eins<strong>at</strong>zbereich <strong>und</strong> geschätzter Zeithorizont für Fahrwerkfunktionen<br />
beeinflusst durch Bremssysteme<br />
Beeinflussung durch Lenkungen<br />
Beeinflussung durch Bremse<br />
Nutzbremsung<br />
Rückwärtsfahrassistent<br />
Hängerbetrieb<br />
Autom<strong>at</strong>isches<br />
Parken<br />
Voll aktives<br />
Fahrwerk<br />
Beeinflussung durch Feder/Dämpfer<br />
Spurrillenkompens<strong>at</strong>ion<br />
Kurvenneigung<br />
Nickausgleich<br />
Beeinflussung<br />
Eigenlenkverhalten<br />
Wendekreidreduktion<br />
Agilität<br />
Soft-Stop<br />
Fadingassistent<br />
µ-Split<br />
Radlastverschiebung<br />
Bremsung<br />
Kompens<strong>at</strong>ion<br />
Regenassistent<br />
Parkassistent<br />
Lenkmomentenregelung<br />
(unterstützend) W<strong>an</strong>kausgleich<br />
Elektronische<br />
Hill descent<br />
Kurvenbrems-<br />
Anhänger<br />
Bremskraftverteilung<br />
control<br />
kontrolle<br />
Stabilisierung<br />
Hillholder<br />
Bremsassistent MSR<br />
ASR ABS EDS<br />
Variable<br />
Lenkübersetzung ESP<br />
Adaptives<br />
Kurvenlicht<br />
Seitenwind<br />
kompens<strong>at</strong>ion<br />
Roll-Over<br />
Stabilisierung<br />
Beeinflussung Stabilis<strong>at</strong>or<br />
Niveauregulierung<br />
Regelung<br />
Aufbaudynamik<br />
(ABC)<br />
Variable<br />
Federung<br />
Variable<br />
Dämpfung<br />
Reifendruckkontrolle<br />
Längsdynamik Querdynamik Vert<strong>ika</strong>ldynamik<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
heute<br />
kurzfristig<br />
-5 Jahre<br />
L<strong>an</strong>gfristig<br />
> 10 Jahre<br />
mittelfristig<br />
5 - 10 Jahre<br />
Abb. 1-13: Eins<strong>at</strong>zbereich <strong>und</strong> geschätzter Zeithorizont für Fahrwerkfunktionen<br />
beeinflusst durch Lenksysteme
Tag des Fahrwerks 2004 10<br />
Beeinflussung durch Lenkungen Beeinflussung durch Feder/Dämpfer<br />
Voll aktives<br />
Beeinflussung durch Bremse<br />
Fahrwerk<br />
Beeinflussung Stabilis<strong>at</strong>or<br />
Nutzbremsung<br />
Rückwärtsfahrassistent<br />
Hängerbetrieb<br />
Autom<strong>at</strong>isches<br />
Parken<br />
Spurrillenkompens<strong>at</strong>ion<br />
Kurvenneigung<br />
L<strong>an</strong>gfristig<br />
> 10 Jahre<br />
mittelfristig<br />
5 - 10 Jahre<br />
Beeinflussung<br />
Nickausgleich<br />
Eigenlenkverhalten<br />
Seitenwind<br />
Wendekreidreduktion<br />
Agilität<br />
kompens<strong>at</strong>ion<br />
Soft-Stop<br />
Fadingassistent<br />
µ-Split<br />
Radlastverschiebung<br />
Bremsung<br />
Kompens<strong>at</strong>ion<br />
Regenassistent<br />
Parkassistent<br />
Lenkmomentenregelung<br />
(unterstützend) W<strong>an</strong>kausgleich<br />
Elektronische<br />
Roll-Over<br />
Hill descent<br />
Kurvenbrems-<br />
Anhänger<br />
Bremskraftverteilung<br />
control<br />
kontrolle<br />
Stabilisierung<br />
Stabilisierung<br />
kurzfristig<br />
-5 Jahre<br />
Niveauregulierung<br />
Hillholder<br />
Bremsassistent MSR<br />
ASR ABS EDS<br />
Variable<br />
Lenkübersetzung ESP<br />
Adaptives<br />
Kurvenlicht<br />
heute Reifendruckkontrolle<br />
Regelung<br />
Aufbaudynamik<br />
(ABC)<br />
Variable<br />
Federung<br />
Variable<br />
Dämpfung<br />
Längsdynamik Querdynamik Vert<strong>ika</strong>ldynamik<br />
Abb. 1-14: Eins<strong>at</strong>zbereich <strong>und</strong> geschätzter Zeithorizont für Fahrwerkfunktionen<br />
beeinflusst durch Feder-/Dämpfersysteme<br />
Beeinflussung durch Lenkungen Beeinflussung durch Feder/Dämpfer<br />
Voll aktives<br />
Beeinflussung durch Bremse<br />
Fahrwerk<br />
Beeinflussung Stabilis<strong>at</strong>or<br />
Nutzbremsung<br />
Rückwärtsfahrassistent<br />
Hängerbetrieb<br />
Autom<strong>at</strong>isches<br />
Parken<br />
Spurrillenkompens<strong>at</strong>ion<br />
Kurvenneigung<br />
L<strong>an</strong>gfristig<br />
> 10 Jahre<br />
mittelfristig<br />
5 - 10 Jahre<br />
Beeinflussung<br />
Nickausgleich<br />
Eigenlenkverhalten<br />
Seitenwind<br />
Wendekreidreduktion<br />
Agilität<br />
kompens<strong>at</strong>ion<br />
Soft-Stop<br />
Fadingassistent<br />
µ-Split<br />
Radlastverschiebung<br />
Bremsung<br />
Kompens<strong>at</strong>ion<br />
Regenassistent<br />
Parkassistent<br />
Lenkmomentenregelung<br />
(unterstützend) W<strong>an</strong>kausgleich<br />
Elektronische<br />
Roll-Over<br />
Hill descent<br />
Kurvenbrems-<br />
Anhänger<br />
Bremskraftverteilung<br />
control<br />
kontrolle<br />
Stabilisierung<br />
Stabilisierung<br />
kurzfristig<br />
- 5 Jahre<br />
Niveauregulierung<br />
Hillholder<br />
Bremsassistent MSR<br />
ASR ABS EDS<br />
Variable<br />
Lenkübersetzung ESP<br />
Adaptives<br />
Kurvenlicht<br />
heute Reifendruckkontrolle<br />
Regelung<br />
Aufbaudynamik<br />
(ABC)<br />
Variable<br />
Federung<br />
Variable<br />
Dämpfung<br />
Längsdynamik Querdynamik Vert<strong>ika</strong>ldynamik<br />
Abb. 1-15: Eins<strong>at</strong>zbereich <strong>und</strong> geschätzter Zeithorizont für Fahrwerkfunktionen<br />
beeinflusst durch Stabilis<strong>at</strong>orsysteme<br />
Aus den Abbildungen wird ersichtlich, dass die unterschiedlichen Fahrwerksysteme<br />
hochgradig mitein<strong>an</strong>der vernetzt eingesetzt werden können <strong>und</strong> so neue Funktionen<br />
generiert werden. Fasst m<strong>an</strong> die Funktionen in die Systeme Komfort, Aktive<br />
Regelung, Komfort/Sicherheit <strong>und</strong> Energiesysteme zusammen ergibt sich Abb. 1-16.<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 11<br />
Komfort Systeme<br />
Aktive Regelsysteme<br />
Nutzbremsung<br />
Rückwärtsfahrassistent<br />
Hängerbetrieb<br />
Autom<strong>at</strong>isches<br />
Parken<br />
Voll aktives<br />
Fahrwerk<br />
Spurrillenkompens<strong>at</strong>ion<br />
Kurvenneigung<br />
Komfort/Sicherheit Systeme<br />
Energie Systeme<br />
L<strong>an</strong>gfristig<br />
> 10 Jahre<br />
mittelfristig<br />
5 - 10 Jahre<br />
Beeinflussung<br />
Nickausgleich<br />
Eigenlenkverhalten<br />
Seitenwind<br />
Wendekreidreduktion<br />
Agilität<br />
kompens<strong>at</strong>ion<br />
Soft-Stop<br />
Fadingassistent<br />
µ-Split<br />
Radlastverschiebung<br />
Bremsung<br />
Kompens<strong>at</strong>ion<br />
Regenassistent<br />
Parkassistent<br />
Lenkmomentenregelung<br />
(unterstützend) W<strong>an</strong>kausgleich<br />
Elektronische<br />
Roll-Over<br />
Hill descent<br />
Kurvenbrems-<br />
Anhänger<br />
Bremskraftverteilung<br />
control<br />
kontrolle<br />
Stabilisierung<br />
Stabilisierung<br />
kurzfristig<br />
- 5 Jahre<br />
Niveauregulierung<br />
Hillholder<br />
Bremsassistent MSR<br />
ASR ABS EDS<br />
Variable<br />
Lenkübersetzung ESP<br />
Adaptives<br />
Kurvenlicht<br />
heute Reifendruckkontrolle<br />
Regelung<br />
Aufbaudynamik<br />
(ABC)<br />
Variable<br />
Federung<br />
Variable<br />
Dämpfung<br />
Längsdynamik Querdynamik Vert<strong>ika</strong>ldynamik<br />
Abb. 1-16: Eins<strong>at</strong>zbereich <strong>und</strong> geschätzter Zeithorizont für Fahrwerkfunktionen<br />
system<strong>at</strong>isiert nach Komfort/ Sicherheit / Regelung / Energie Systemen<br />
Es wird deutlich, dass sowohl die Fahrwerksysteme als die Komfort- oder Sicherheitssysteme<br />
in allen Bewegungsrichtungen aktiv das Fahrverhalten von Fahrzeugen<br />
beeinflussen. Dies bedeutet, dass für zukünftige Entwicklungen der Systemarchitektur<br />
<strong>und</strong> der Systemintegr<strong>at</strong>ion eine bedeutende Rolle zugeschrieben werden<br />
muss. Ein Zwischenfazit der gen<strong>an</strong>nten Aspekte ist in Abb. 1-17 aufgeführt.<br />
Aktive Regelsysteme, Sicherheits- <strong>und</strong> Komfortsysteme beeinflussen alle<br />
drei Bewegungsrichtungen des Fahrzeugs<br />
Zukünftige Funktionen werden nicht nur von einem der Fahrwerksysteme,<br />
wie Bremse, Lenkung, Feder/Dämpfer oder Stabilis<strong>at</strong>or beeinflusst<br />
Die Qualität zukünftiger Funktionen ist abhängig von den<br />
Gr<strong>und</strong>eigenschaften der Achssysteme<br />
Zukünftige Systemarchitekturen sind abhängig vom Integr<strong>at</strong>ionsgrad der<br />
Fahrwerkfunktionen.<br />
Für die Entwicklung muss die gesamte Kette ausgehend von der Definition bis zur<br />
Erprobung abgebildet werden können<br />
Bereichsübergreifende Kombin<strong>at</strong>ion von Auslegungs- <strong>und</strong> Berechungswerkzeuge mit<br />
experimentellen Untersuchungen ist für die Forschung & Entwicklung erforderlich<br />
Abb. 1-17: Zwischenfazit II<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 12<br />
Die aufgezeigten Wirkzusammenhänge <strong>und</strong> die R<strong>an</strong>dbedingungen der fortschreitenden<br />
Entwicklung erfordern für Hochschulen <strong>und</strong> Entwicklungsdienstleister<br />
eine bereichsübergreifende Kombin<strong>at</strong>ion aller Untersuchungswerkzeuge.<br />
Die Herausforderungen für Hochschulen <strong>und</strong> F&E Dienstleistern im Rahmen des<br />
Entwicklungsprozesses sind in Abb. 1-18 aufgezeigt.<br />
Beteiligung<br />
Hochschulen <strong>und</strong><br />
Forschungseinrichtungen<br />
Tr<strong>an</strong>sfer Tr<strong>an</strong>sfer<br />
Definition Konzept Auslegung/Berechnung … Konstruktion Erprobung Markteinführung<br />
Zeit / Produktentstehungszyklus<br />
F&E-Dienstleister<br />
<strong>und</strong> Industrie<br />
Abb. 1-18: Herausforderungen für Hochschulen, Dienstleistern <strong>und</strong> Industrie<br />
Alle Disziplinen ausgehend von der Definitionsphase über die Auslegung <strong>und</strong><br />
Berechnung bis hin zur Erprobung können von <strong>ika</strong> <strong>und</strong> <strong>fka</strong> abgedeckt werden. Die<br />
größte Bedeutung kommt hierbei dem Wissenstr<strong>an</strong>sfer zwischen den Projektpartnern<br />
im gesamten Entwicklungsprozess zu.<br />
Die Wechselwirkungen zwischen den gestiegenen Markt- <strong>und</strong> Entwicklungs<strong>an</strong>forderungen<br />
führen zu vielschichtigen Projekten, wovon <strong>an</strong> dieser Stelle ausgewählte<br />
Forschungsprojekte vorgestellt werden.<br />
2 <strong>Fahrwerkentwicklungen</strong> <strong>an</strong> <strong>ika</strong> <strong>und</strong> <strong>fka</strong><br />
Als ausgewählte Projektbeispiele werden hier die in Abb. 2-1 aufgeführten Themen<br />
näher erläutert.<br />
Von der Reifenmessung zum<br />
Tyre-Property-File<br />
Prüfstände<br />
<strong>ika</strong>-Fitting-Tool<br />
Simul<strong>at</strong>ion<br />
G<strong>an</strong>zheitliche Untersuchungen<br />
von Achskomponenten<br />
Lastkollektiventwicklung<br />
Fahrversuch<br />
Simul<strong>at</strong>ion<br />
Prüfst<strong>an</strong>dskonzeption<br />
Prüfung<br />
Achsauslegung <strong>und</strong> Berechnung<br />
Produktionsunterstützung<br />
Markteinführung Definitionsphase<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
Testing<br />
Fahrzeugentwicklungsprozess<br />
Prototyping<br />
Konstruktion<br />
&<br />
Design<br />
Abb. 2-1: Ausgewählte <strong>Fahrwerkentwicklungen</strong> <strong>an</strong> <strong>ika</strong> <strong>und</strong> <strong>fka</strong><br />
Studie<br />
&<br />
Konzept<br />
Auslegung<br />
&<br />
Berechnung
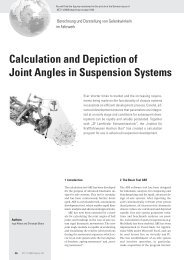
Tag des Fahrwerks 2004 13<br />
2.1 Von der Reifenmessung zum Tyre-Property-File<br />
Neben den Fahrer- <strong>und</strong> den Fahrzeugeigenschaften ist für einen Sicherheitsgewinn<br />
auch der Fahrbahn-Reifen-Kontakt wichtig. Der Reifen ist das Bindeglied zwischen<br />
Fahrbahn <strong>und</strong> Fahrzeug, er überträgt die Kräfte zwischen Fahrzeug <strong>und</strong> Fahrbahn.<br />
Das Kraftschlusspotenzial im herrschenden Fahrzust<strong>an</strong>d ist eine wichtiges Kriterium<br />
für Brems- <strong>und</strong> Lenkregelsysteme. Zur detaillierten Untersuchung von Reifen stehen<br />
<strong>an</strong> <strong>ika</strong> <strong>und</strong> <strong>fka</strong> insgesamt drei Reifenprüfst<strong>an</strong>de zur Verfügung. Dies sind:<br />
- Pkw-Reifenprüfst<strong>an</strong>d (Morep)<br />
- Nfz-Reifenprüfst<strong>an</strong>d (Nfz)<br />
- mobiler Reifenprüfst<strong>an</strong>d (FAREP)<br />
Die technischen D<strong>at</strong>en <strong>und</strong> der Prüfst<strong>an</strong>dsaufbau des Pkw-Reifenprüfst<strong>an</strong>d (Morep)<br />
sind in Abb. 2-2 dargestellt.<br />
Testgeschwindigkeit [km/h]: 5 .. 180<br />
Trommel<strong>an</strong>triebsleistung [kW]: 110<br />
Trommeldurchmesser [m]: 1,59<br />
Trommelbreite [m]: 0,8<br />
mech. Radlastbereich [kN]: 1 .. 11<br />
messbarer Radlastbereich [kN]: 1 .. 20<br />
Schräglaufwinkelbereich [°]: -12 .. +12<br />
Sturzwinkelbereich [°]: -20 .. +45<br />
erzeugbares Bremsmoment [kNm]: 0 .. 2<br />
6-Komponenten Messnabe auf Basis<br />
piezoelektrischer Quarzkraftsensoren (Kistler)<br />
Lauftrommelbeschichtung Kor<strong>und</strong> P80<br />
41 ©<br />
Abb. 2-2: Technische D<strong>at</strong>en des Pkw-Reifenprüfst<strong>an</strong>ds (Morep)<br />
4ts0825 ppt<br />
Die technischen D<strong>at</strong>en <strong>und</strong> der Prüfst<strong>an</strong>dsaufbau für den Nfz-Reifenprüfst<strong>an</strong>d (Nfz)<br />
sind in Abb. 2-3 beschrieben.<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 14<br />
Testgeschwindigkeit [km/h]:5 .. 120<br />
Trommel<strong>an</strong>triebsleistung [kW]: 200<br />
Trommeldurchmesser [m]: 2,547<br />
Trommelbreite [m]: 0,9<br />
mech. Radlastbereich [kN]: 1 .. 60<br />
messbarer Radlastbereich [kN]: 1 .. 40<br />
Schräglaufwinkelbereich [°]: -15 .. +15<br />
erzeugbare Bremskräfte [kN]: 0 .. 25<br />
5-Komponenten Messnabe auf<br />
Basis von Dehnungs-Messstreifen<br />
Lauftrommelbeschichtung Kor<strong>und</strong> P80<br />
Abb. 2-3: Technische D<strong>at</strong>en des Nfz-Reifenprüfst<strong>an</strong>ds (Nfz)<br />
Die technischen D<strong>at</strong>en <strong>und</strong> der Prüfst<strong>an</strong>dsaufbau für den mobilen Reifenprüfst<strong>an</strong>d<br />
(Farep) sind in Abb. 2-4 beschrieben.<br />
Testgeschwindigkeit [km/h]: 0 .. 90<br />
Lkw-Antriebsleistung [kW]: 350<br />
mech. Radlastbereich [kN]: 1 .. 60<br />
messbarer Radlastbereich [kN]: 1 .. 40<br />
Schräglaufwinkelbereich [°]: -45 .. +45<br />
Konstruktionsskizzen hier ohne Anbindung <strong>an</strong> Fzg. <strong>und</strong> ohne Zus<strong>at</strong>zversteifungen<br />
Sturzwinkelbereich [°]: -10 .. +10<br />
erzeugbares Bremsmoment [kNm]: 0 .. 25<br />
messbare Reifengrößen 14“ bis SuperSingle<br />
6-Komponenten Messnabe auf Basis<br />
piezoelektrischer<br />
Quarzkraftsensoren (Kistler)<br />
52 ©<br />
Abb. 2-4: Technische D<strong>at</strong>en mobiler Reifenprüfst<strong>an</strong>d (FAREP)<br />
4ts0825.ppt<br />
Mit diesen Prüfständen werden Messungen der st<strong>at</strong>ionären Reifencharakteristiken<br />
durchgeführt. Haupt<strong>an</strong>wendungsgebiet sind derzeit die Ermittlung <strong>und</strong> Erstellung von<br />
gefitteten Reifenmodellen für die Fahrdynamiksimul<strong>at</strong>ion. Gr<strong>und</strong>lage bilden die<br />
Reifenmessungen, die nach einer Ergebnisaufbereitung in einem eigens entwickelten<br />
<strong>ika</strong>-Fittingtool (<strong>ika</strong> Tyres in Motion) als Parametersätze (Magic Fornular MF 5.0 bis<br />
5.2) für die Simul<strong>at</strong>ion zur Verfügung stehen. Die Vorgehensweise ist in Abb. 2-5<br />
zusammengefasst.<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 15<br />
Messung st<strong>at</strong>ionärer Reifencharakteristiken<br />
Schräglaufseitenkräfte<br />
Umf<strong>an</strong>gskräfte<br />
Rückstellmomente<br />
Aufbereitung der Messergebnisse<br />
Einlesen der Messungen in das <strong>ika</strong>/<strong>fka</strong> Parameter-<br />
Fittingtool für die ‚Magic Formula‘<br />
Parameter-Fitting für die MF 5.0 bis MF 5.2<br />
für den USE MODE 14 für ADAMS/SIMPACK<br />
Funktionstest des neu generierten Tire Property-Files<br />
auf dem in ADAMS/Car integrierten <strong>ika</strong>/<strong>fka</strong> Nfz-<br />
Reifenprüfst<strong>an</strong>d<br />
43<br />
Abb. 2-5: Von der Reifenmessung zum Tyre-Property-File<br />
measurement<br />
simul<strong>at</strong>ion<br />
Ein Vergleich von Messung <strong>und</strong> Berechnung zeigt Abb. 2-6. Es ist die Seitenkraft Fy<br />
über dem Schräglaufwinkel α aufgetragen. Die mit dem <strong>ika</strong>-Fittingtool berechneten<br />
Größen sind gestrichelt dargestellt <strong>und</strong> die Übereinstimmung ist gut zu erkennen.<br />
l<strong>at</strong>eral force [N]<br />
15000<br />
10000<br />
5000<br />
0<br />
-5000<br />
-10000<br />
-15000<br />
-15 -12 -9 -6 -3 0 3 6 9 12 15<br />
side slip <strong>an</strong>gle [°]<br />
meas Fy 1 calc Fy 1 meas Fy 2 calc Fy 2<br />
meas Fy 3 calc Fy 3 meas Fy 4 calc Fy 4<br />
meas Fy 5 calc Fy 5 meas Fy 6 calc Fy 6<br />
Abb. 2-6: Vergleich Messung <strong>und</strong> Berechnung <strong>ika</strong>-Fittingtool für<br />
Seitenkraft Fy über Schräglaufwinkel α<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
Radlast<br />
16000N<br />
12800N<br />
9600N<br />
6400N<br />
3200N<br />
1600N
Tag des Fahrwerks 2004 16<br />
Für die Validierung der Ergebnisse <strong>und</strong> der gefitteten Parametersätze wird das MKS-<br />
Tool „ADAMS“ eingesetzt. Der Reifenprüfst<strong>an</strong>d ist als Simul<strong>at</strong>ionsmodell abgebildet.<br />
Die ermittelten Parameterd<strong>at</strong>en (Tyre-Property-File) werden eingelesen <strong>und</strong> die<br />
Reifenuntersuchungen in der Simul<strong>at</strong>ion nachgefahren. Die Ergebnisse für<br />
kombinierten Längs- <strong>und</strong> Querschlupf sind in Abb. 2-7 dargestellt.<br />
Kombinierter Längs- <strong>und</strong> Querschlupf Radlast 22000N<br />
Simul<strong>at</strong>ionsergebnisse des <strong>ika</strong>-Fittingtools<br />
Abb. 2-7: Vergleich Ergebnisse <strong>ika</strong>-Fittingtool mit ADAMS-Simul<strong>at</strong>ion<br />
Schräglaufwinkel<br />
Simul<strong>at</strong>ionsergebnisse aus ADAMS/Car<br />
Zudem können weitere Reifenuntersuchungen zur Ermittlung von vert<strong>ika</strong>ldynamischen<br />
Reifenmodellen (RMODK) durchgeführt werden. Bis hin zu Rollwiderst<strong>an</strong>dsmessungen<br />
ist dies möglich. Eine Aufstellung ist in Abb. 2-8 beschrieben.<br />
Ermittlung der Reifen-<br />
Bodendruckverteilung<br />
Schlagleistentests für<br />
Komfortuntersuchungen<br />
Reifen-Modal<strong>an</strong>alyse<br />
Modale Eigenformen<br />
Modale Eigenfrequenzen<br />
Vermessung der st<strong>at</strong>ischen<br />
Reifensteifigkeiten<br />
Longitudinale Steifigkeit<br />
L<strong>at</strong>erale Steifigkeit<br />
Vert<strong>ika</strong>le Steifigkeit<br />
Ermittlung von Reifen-MTM<br />
Abb. 2-8: Weitere Reifenuntersuchungen<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
1°<br />
2°<br />
5°<br />
8°<br />
15°<br />
40°
Tag des Fahrwerks 2004 17<br />
Im Rahmen der Fahrwerkentwicklung werden auch Untersuchungen zu Reifensensoren<br />
am <strong>ika</strong> durchgeführt. In einem EU-Projekt APOLLO, was gemeinsam mit<br />
Fahrzeug- <strong>und</strong> Reifenherstellern sowie Elektronikzulieferern <strong>und</strong> Forschungsinstituten<br />
werden gr<strong>und</strong>legende Arbeiten zu Reifen <strong>und</strong> Sensoren durchgeführt.<br />
Ziel ist ein innov<strong>at</strong>iver Sensor zur Überwachung des Reifenzust<strong>an</strong>des, der<br />
Fahrbahnverhältnisse <strong>und</strong> des Reifen-Fahrbahnkontakts. Zudem werden neue<br />
Lösungen zur drahtlosen Kommun<strong>ika</strong>tion <strong>und</strong> b<strong>at</strong>terieloser Energieversorgung<br />
erarbeitet. Ein intelligenter Reifen mit der Integr<strong>at</strong>ion aller elektronischen Komponenten<br />
im Reifen als mech<strong>at</strong>ronisches System wird im Rahmen des Projektes<br />
aufgebaut. Abb. 2-9 zeigt die Zielsetzung <strong>und</strong> die beteiligten Unternehmen.<br />
Aufbau eines intelligenten Reifens mit Integr<strong>at</strong>ion aller<br />
elektronischen Komponenten als mech<strong>at</strong>ronisches System<br />
Entwicklung innov<strong>at</strong>iver Sensoren zur Überwachung des<br />
Reifenzust<strong>an</strong>des, der Fahrbahnverhältnisse <strong>und</strong> des Reifen-<br />
Fahrbahnkontakts<br />
Entwicklung neuer Lösungen zur drahtlosen Kommun<strong>ika</strong>tion<br />
<strong>und</strong> b<strong>at</strong>terie-loser Energieversorgung, um intelligente<br />
Reifensysteme zu ermöglichen<br />
Abb. 2-9: EU-Reifenprojekt APOLLO: Projektziele <strong>und</strong> Partner<br />
EU-Projektkonsortium<br />
DaimlerChrysler AG<br />
Helsinki University of<br />
Technology (HUT)<br />
Magneti Marelli<br />
Noki<strong>an</strong> Tyres<br />
Pirelli<br />
<strong>ika</strong> RWTH Aachen<br />
VTT (Finnl<strong>an</strong>d)<br />
Ein <strong>an</strong> <strong>ika</strong> <strong>und</strong> <strong>fka</strong> erarbeitetes Ergebnis ist die Erstellung eines vereinfachtes<br />
phys<strong>ika</strong>lischen Reifenmodells. Gr<strong>und</strong>lage bildet hier die Betrachtung der Gürtelverformung<br />
aufgr<strong>und</strong> der Profilauslenkung in der L<strong>at</strong>schfläche unter Querschlupf. Die<br />
Annäherung der Gürteldeform<strong>at</strong>ion geschieht <strong>an</strong>h<strong>an</strong>d von vereinfachten m<strong>at</strong>hem<strong>at</strong>ischen<br />
Beziehungen. In Abb. 2-10 ist die Vorgehensweise <strong>und</strong> ein Vergleich von<br />
Messung <strong>und</strong> Modell dargestellt.<br />
MZ FY L<strong>at</strong>sch<br />
Schräglaufwinkel<br />
kinem<strong>at</strong>ische<br />
Deform<strong>at</strong>ion<br />
Haftgrenze<br />
Gleitgrenze<br />
reibwertbedingte<br />
Maximaldeform<strong>at</strong>ion<br />
= f(<br />
phys.<br />
param.,<br />
α,<br />
µ , H,<br />
...)<br />
= f(<br />
phys.<br />
param.,<br />
α,<br />
µ , H,<br />
...)<br />
effektive<br />
Profildeform<strong>at</strong>ion<br />
Phys<strong>ika</strong>lisches Reifenmodell Zusammenh<strong>an</strong>g M z <strong>und</strong> F y<br />
Seitenkraft<br />
F Z<br />
Rückstellmoment<br />
M Z<br />
Abb. 2-10: Vereinfachtes Reifenmodell für Querschlupf (Betrachtung der<br />
Gürtelverformung)<br />
Vergleich:<br />
Messung<br />
Modell<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 18<br />
Für die Überprüfung <strong>und</strong> Validierung des vereinfachten Reifenmodells wird ein<br />
optischer Sensor eingesetzt. Der optische Sensor wird in der Felge montiert <strong>und</strong><br />
erfasst die Gürtelbewegung. Der Aufbau ist Abb. 2-11 in näher gezeigt.<br />
digitale<br />
Signalübertragungseinheit<br />
mit Li-Ion Akku<br />
U I<br />
PSD<br />
Linse<br />
IR-<br />
Diode<br />
IR-Diode<br />
Signalübertrager<br />
Abb. 2-11: Optische Messung der Reifenverformung am Gürtel bei Querschlupf<br />
An dieser Stelle ist auf den Vortrag von Herrn Dipl.-Ing. Jens Holtschulze auf dem<br />
13. Aachener Kolloquium 2004 verwiesen, in dem die Zusammenhänge detailliert<br />
erläutert sind.<br />
2.2 G<strong>an</strong>zheitliche Untersuchung von Achskomponenten<br />
Wie zuvor beschrieben, sind für zukünftige Fahrwerke neben den elektronischen<br />
Komponenten auch die mech<strong>an</strong>ischen Eigenschaften der Achskomponenten von<br />
enormer Bedeutung, da sie unmittelbar den Qualitätseindruck beim K<strong>und</strong>en<br />
bestimmen.<br />
An <strong>ika</strong> <strong>und</strong> <strong>fka</strong> werden hierzu umf<strong>an</strong>greiche Untersuchungen von Achskomponenten<br />
durchgeführt. Dies sind zum Beispiel:<br />
p<br />
Lastkollektiventwicklung<br />
Fahrversuch<br />
Simul<strong>at</strong>ion<br />
Prüfst<strong>an</strong>dskonzeption<br />
Prüfung<br />
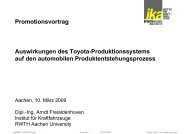
So wurden im Fahrversuch (Abb. 2-12) Lastkollektive experimentell ermittelt.<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
Linse
Tag des Fahrwerks 2004 19<br />
Abb. 2-12: Lastkollektivermittlung auf Schlechtwegstrecken<br />
Der Verfahrwinkel von Kugelgelenken ist bei den Fahrversuchen nicht direkt<br />
messbar. Für die Bestimmung der Winkelkollektive wurde eine Winkelberechnung mit<br />
Hilfe von ADAMS durchgeführt (Abb. 2-13).<br />
Ermittlung von Einfederweg<br />
<strong>und</strong> Lenkwinkel im<br />
Fahrversuch<br />
Bestimmung der<br />
Verdrehwinkel in den<br />
Kugelgelenken mittels<br />
Simul<strong>at</strong>ion<br />
Lastkollektiv für Kugelgelenke<br />
inkl. der Verdrehwinkel<br />
Querlenker<br />
Dämpfer<br />
Spurst<strong>an</strong>ge<br />
Pendelstütze<br />
Zahnst<strong>an</strong>genlenkung<br />
Abb. 2-13: Ermittlung der Winkelkollektive (ADMS-Simul<strong>at</strong>ion)<br />
Stabilis<strong>at</strong>or<br />
Ausgehend von den Lastkollektiven werden Dauerlauferprobungen von<br />
Achskomponenten auf dem Hydroplus <strong>an</strong> <strong>ika</strong> <strong>und</strong> <strong>fka</strong> durchgeführt. Herausforderung<br />
ist hier den geforderten Kraftverlauf in der Bewegungsrichtung eines Kugelgelenks<br />
nachzubilden. Ein neues Prüfst<strong>an</strong>dskonzept wurde hierzu entwickelt. Der geforderte<br />
Lastfall ist in Abb. 2-14 dargestellt. Neben der Kraft F muss auch ein Moment M<br />
abgestützt werden.<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
Rad<br />
Feder
Tag des Fahrwerks 2004 20<br />
45°<br />
61<br />
F<br />
45°<br />
Kugelkopf Mech<strong>an</strong>isches Ers<strong>at</strong>zmodel<br />
x<br />
F<br />
Mb = F ⋅ x ⋅ cos 45°<br />
Abb. 2-14: Belastungsfall <strong>und</strong> Krafteinleitung<br />
F M<br />
St<strong>at</strong>isches Gleich-<br />
Gewicht nur mit<br />
Moment möglich<br />
Mech<strong>an</strong>isches Ers<strong>at</strong>zmodel<br />
(Freigeschnitten)<br />
Für die Lasteinleitung wird eine Aufnahme für das Kugelgehäuse <strong>und</strong> den Zapfen<br />
konzipiert, die es ermöglicht, den geforderten Kipp- <strong>und</strong> Drehwinkelverlauf<br />
nachzufahren. Der zur Krafteinleitung eingesetzte Hydraulikzylinder wird so adaptiert,<br />
dass eine gleichmäßige Kraftverteilung unter einem Winkel von 45° zur Längsachse<br />
der Gelenke realisiert. Der Kraftverlauf für die überlagerte Dreh- <strong>und</strong> Kippbewegung<br />
ist in Abb. 2-15 aufgezeigt.<br />
Kraftfluss<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen<br />
L<br />
F<br />
F<br />
Drehen<br />
F<br />
Punktlast auf Lagerschale<br />
Umlauflast auf Kugel<br />
Kippen<br />
Abb. 2-15: Kraftfluss im Bauteil <strong>und</strong> überlagert Dreh- sowie Kippbewegung<br />
Das Prüfst<strong>an</strong>dskonzept (Abb. 2-16) sieht eine gleichzeitige Prüfung von vier<br />
Gelenken vor. Der Antrieb für die Winkelbewegung erfolgt über einen Elektromotor.
Tag des Fahrwerks 2004 21<br />
Mittels der Drehzahl <strong>und</strong> einer <strong>an</strong>gepassten Getriebeauslegung werden die<br />
geforderten Frequenzen <strong>und</strong> Verstellwinkel eingestellt. Mit einem Zylinder werden<br />
jeweils zwei Gelenke belastet. Dies wird dadurch erreicht, dass er zwischen je zwei<br />
Prüflingen montiert wird.<br />
Verwendung eines E-Motors für zwei<br />
unterschiedliche Frequenz<strong>an</strong>regungen<br />
Drehfrequenz 0,5 Hz<br />
Kippfrequenz 1,8 Hz<br />
Überlagerung der<br />
Bewegung mittels Getriebekinem<strong>at</strong>ik<br />
Amplitudeneinstellung<br />
über Exzenterwellen<br />
Abb. 2-16: Prüfst<strong>an</strong>dskonzept <strong>und</strong> Antrieb Dreh- <strong>und</strong> Kippbewegung<br />
Der Prüfst<strong>an</strong>d wurde gemäß des Konzeptes realisiert <strong>und</strong> Dauerlauferprobung von<br />
Kugelgelenken durchgeführt. Der Prüfaufbau ist in Abb. 2-17 dargestellt.<br />
Abb. 2-17: Realisierung des Prüfst<strong>an</strong>ds<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 22<br />
2.3 Achsauslegung <strong>und</strong> Achsberechung<br />
Für die Achsvorauslegung <strong>und</strong> die Konzeptfindung sind Berechnungstools erforderlich.<br />
Dir Gr<strong>und</strong>idee war der Wunsch nach einem kompakten sowie einfach zu<br />
bedienenden <strong>und</strong> exakt rechenden Programm, welches auch aufgelöste Lenker als<br />
Achsvari<strong>an</strong>ten berechnen k<strong>an</strong>n.<br />
Dazu wurden die m<strong>at</strong>hem<strong>at</strong>ischen Ansätze der räumlichen Radstellung nach W.<br />
M<strong>at</strong>schinsky für eine allgemeine, räumliche 5-Lenker-Radaufhängung exakt <strong>und</strong><br />
explizit aufgestellt. Aus diesem allgemeinen Radaufhängungssystem wurden<br />
verschiedene, spezielle Radaufhängungen abgeleitet <strong>und</strong> die entsprechenden<br />
Bewegungsgleichungen aufgestellt.<br />
Die Berechnung der Radstellung beruht auf dem Geschwindigkeitszust<strong>an</strong>d des<br />
Radträgers. Der Geschwindigkeitszust<strong>an</strong>d ist mit drei tr<strong>an</strong>sl<strong>at</strong>orischen sowie mit drei<br />
rot<strong>at</strong>orischen Geschwindigkeitskomponenten vollständig beschrieben. Diese sechs<br />
Geschwindigkeitskomponenten ergeben sich aus der Lösung der Bewegungsgleichungen.<br />
Durch die Projektion des Winkelgeschwindigkeitsvektors in zwei Ebenen (Omega-<br />
Methode) ist es möglich, die Lenkachsengeometrie sowie alle daraus abgeleiteten<br />
kinem<strong>at</strong>ischen Kennwerte selbst bei modernen, ideellen Lenkachsen einer Radaufhängung<br />
zu bestimmen, die keine realen <strong>und</strong> fixierten Lenkpunkte aufweist.<br />
Eine zusätzliche Methode, die auf der Omega-Methode basiert, erlaubt es, die<br />
Kennwerte der Lenkachsengeometrie nicht nur bei einem Lenkvorg<strong>an</strong>g, sondern<br />
auch bei einem Ein-/Ausfedervorg<strong>an</strong>g zu berechnen.<br />
All diese Berechnungsfunktionen wurden in eine Rechenroutine in der Programmiersprache<br />
VBA unter Microsoft Excel umgesetzt <strong>und</strong> programmiert. Es wurde eine<br />
einfach zu bedienende Benutzeroberfläche in Microsoft Excel erstellt, die einige<br />
zusätzliche Funktionen enthält <strong>und</strong> den Anwender mit graphischen Darstellungen<br />
unterstützt.<br />
Die Zielsetzung <strong>und</strong> Vorgehensweise ist in Abb. 2-18 zusammengefasst.<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 23<br />
Zielsetzung<br />
Einfache Vorauslegung von Radaufhängungen<br />
Berechnung der Achskinem<strong>at</strong>ik mit den Freiheitsgraden „Federn“ <strong>und</strong><br />
„Lenken“ auch für räumliche Achsmech<strong>an</strong>ismen (aufgelöste Lenker)<br />
Benchmark für verschiedene Achs<strong>an</strong>ordungen<br />
Idee <strong>und</strong> Gr<strong>und</strong>lage:<br />
Nutzung der m<strong>at</strong>hem<strong>at</strong>ischen Bewegungsgleichungen für<br />
eine allgemeine Moment<strong>an</strong>schraubung nach M<strong>at</strong>schinsky.<br />
(Bewegung <strong>und</strong> Geschwindigkeit um eine Moment<strong>an</strong>achse<br />
mit Achsenvorschub)<br />
Umsetzung in MS-Excel (Visual Basic for Applic<strong>at</strong>ions):<br />
Verwendung von zwei verschiedenen Achstypen, mit<br />
denen eine Vielzahl verschiedener Radaufhängungen<br />
abgedeckt werden:<br />
Allgemeiner 5-Lenker (Multilink)<br />
McPherson Radaufhängung<br />
69 ©<br />
Abb. 2-18: Idee <strong>und</strong> Umsetzung zu einem Achsberechnungstool „ABE“<br />
4t 0825 t<br />
In der Benutzeroberfläche können bis zu zehn verschiedene Radaufhängungssysteme<br />
berechnet <strong>und</strong> dargestellt werden, so dass etwa ein Benchmark zwischen<br />
verschiedenen Achssystemen oder eine Parameter-Vari<strong>at</strong>ion ausgehend von einer<br />
Radaufhängungs-Vari<strong>an</strong>te ermöglicht werden.<br />
Die D<strong>at</strong>eneingabe <strong>und</strong> der D<strong>at</strong>enfluss für die Berechung der Starrkinem<strong>at</strong>ik von<br />
Mehrlenkerachsen zeigt Abb. 2-19.<br />
Eingabe<br />
Benutzerd<strong>at</strong>en<br />
(Hardpoints, ggf.<br />
Fahrzeug-Parameter)<br />
Solver<br />
(ABE Engine)<br />
Notwendige D<strong>at</strong>eneingabe:<br />
- Achstyp (McPherson / Multilink)<br />
- Hardpoints/Gelenkkoordin<strong>at</strong>en in KO-Lage<br />
- Anlenkpunkt der Feder-/Dämpfereinheit<br />
- Spurweite in KO-Lage<br />
Optionale D<strong>at</strong>eneingabe:<br />
- Angabe VA/HA<br />
-Radst<strong>an</strong>d<br />
- Schwerpunkthöhe<br />
- Bremskraftverteilung<br />
- Antriebsmomentenverteilung<br />
- Lenkgetriebeübersetzung<br />
Numerische<br />
D<strong>at</strong>enausgabe<br />
Solver Optionen:<br />
2 Bewegungsfreiheitsgrade:<br />
Federbewegung /<br />
Spurst<strong>an</strong>genbewegung<br />
(Bewegungsbereiche frei einstellbar)<br />
Verschiebung der KO-Lage<br />
vor Berechnung der Achskinem<strong>at</strong>ik<br />
(z. B. Simul<strong>at</strong>ion Beladungszustände)<br />
Abb. 2-19: D<strong>at</strong>enfluss <strong>und</strong> D<strong>at</strong>eneingabe Achsberechnungstool „ABE“<br />
Grafische<br />
Ergebnisdarstellung<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 24<br />
Eine Übersicht der benötigten D<strong>at</strong>en <strong>und</strong> Ergebnisse zeigt Abb. 2-20.<br />
- (Vor)Spurwinkel<br />
- Sturzwinkel<br />
- Spurweite<br />
- Federweg<br />
- Radhub (effektiver Federweg)<br />
- W<strong>an</strong>kpollage „Hubfedern“<br />
- W<strong>an</strong>kpollage „W<strong>an</strong>kfedern“<br />
- optimaler Bremsabstützwinkel<br />
- Bremsnickausgleich<br />
- optimaler Anfahrabstützwinkel<br />
- Anfahrnickausgleich<br />
St<strong>an</strong>dard D<strong>at</strong>enausgabe (Achskinem<strong>at</strong>ikergebnisse)<br />
- Nachlaufwinkel<br />
- Nachlaufstrecke<br />
- Nachlaufvers<strong>at</strong>z<br />
- Spreizungswinkel<br />
- Lenkrollradius<br />
- Spreizungsvers<strong>at</strong>z<br />
- Schrägfederungswinkel<br />
- Federübersetzung<br />
Optionale D<strong>at</strong>enausgabe nach „optionaler D<strong>at</strong>eneingabe“<br />
Abb. 2-20: D<strong>at</strong>enausgabe Achsberechnungstool „ABE“<br />
- Störkrafthebelarm „Bremsen“<br />
- Störkrafthebelarm „Antreiben“<br />
- Radlenkwinkel innen u. außen<br />
- mittlerer Radlenkwinkel<br />
- Spurdifferenzwinkel<br />
- t<strong>at</strong>sächlicher<br />
Bremsabstützwinkel<br />
- t<strong>at</strong>sächlicher<br />
Anfahrabstützwinkel<br />
- Ackerm<strong>an</strong>n-Lenkwinkel (exakte Berechnung)<br />
- Ackerm<strong>an</strong>n<strong>an</strong>teil Lenksystem<br />
- Lenkübersetzung<br />
- Lenkradwinkel<br />
Im ABE-Programm sind Eingabe- <strong>und</strong> Ausgabemasken sowie die graphischen<br />
Darstellungen implementiert. Eine Beispielrechnung für eine Vari<strong>at</strong>ion der oberen<br />
Spurst<strong>an</strong>gen<strong>an</strong>bindung ist in Abb. 2-21 dargestellt.<br />
Beispiel mit Tie-rod inner:<br />
Z-user<br />
300 (Origin)<br />
290 (-10mm)<br />
310 (+10mm)<br />
Eingabemasken ABE<br />
Vari<strong>at</strong>ion der<br />
Spurst<strong>an</strong>gen<strong>an</strong>bindung<br />
73 ©<br />
Abb. 2-21: Eingabemasken ABE – Vari<strong>at</strong>ion der Spurst<strong>an</strong>gen<strong>an</strong>bindung<br />
4ts0825.ppt<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen
Tag des Fahrwerks 2004 25<br />
Die Ergebnisdarstellung (Abb. 2-22) erfolgt in D<strong>at</strong>enblätter oder entsprechend der<br />
üblichen Diagramme. Über Auswahl- <strong>und</strong> Hilfefenster können zusätzliche<br />
Inform<strong>at</strong>ionen, wie zum Beispiel verwendetes Koordin<strong>at</strong>ensystem, Winkelbezeichnungen,<br />
etc aufgerufen werden. Auf diese Weise ist das Programm kompakt <strong>und</strong><br />
leicht zu bedienen.<br />
74 ©<br />
Abb. 2-22: Auswahlfenster Erbgebnis – Vari<strong>at</strong>ion der Spurst<strong>an</strong>gen<strong>an</strong>bindung<br />
4ts0825.ppt<br />
Für die Validierung des Achsberechnungstools ABE wurden die Ergebnisse aus ABE<br />
mit denen aus dem Mehrkörper-Simul<strong>at</strong>ions-Programm ADAMS/Car verglichen. Es<br />
zeigt sich die hohe Übereinstimmung der Ergebnisse, so dass das Programm ABE<br />
für eine rein starrkinem<strong>at</strong>ische Auslegung einer Radaufhängung oder einen Vergleich<br />
von verschiedenen Achssystemen sehr gut geeignet ist.<br />
Bezüglich der Erweiterung oder Veränderung dieses bestehenden Berechnungstools<br />
sind verschiedenen Ansätze wie Gelenkberechnung <strong>und</strong> weitere denkbar.<br />
04. Oktober 2004 Institut für Kraftfahrwesen Aachen<br />
RWTH Aachen