Shortest path in a multiply-connected domain having curved ...
Shortest path in a multiply-connected domain having curved ...
Shortest path in a multiply-connected domain having curved ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
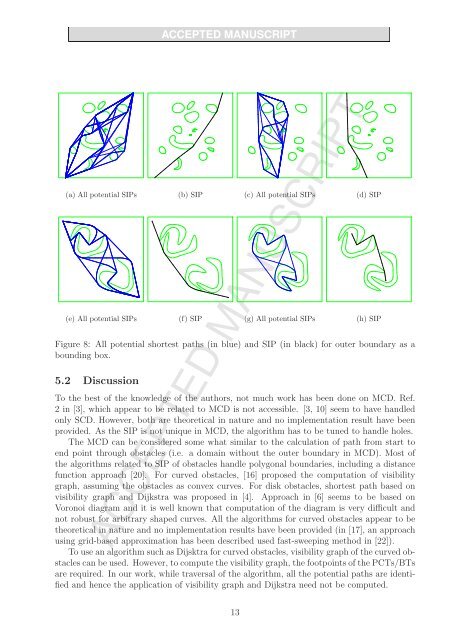
(a) All potential SIPs (b) SIP (c) All potential SIPs (d) SIP<br />
(e) All potential SIPs (f) SIP (g) All potential SIPs (h) SIP<br />
Figure 8: All potential shortest <strong>path</strong>s (<strong>in</strong> blue) and SIP (<strong>in</strong> black) for outer boundary as a<br />
bound<strong>in</strong>g box.<br />
5.2 Discussion<br />
To the best of the knowledge of the authors, not much work has been done on MCD. Ref.<br />
2 <strong>in</strong> [3], which appear to be related to MCD is not accessible. [3, 10] seem to have handled<br />
only SCD. However, both are theoretical <strong>in</strong> nature and no implementation result have been<br />
provided. As the SIP is not unique <strong>in</strong> MCD, the algorithm has to be tuned to handle holes.<br />
The MCD can be considered some what similar to the calculation of <strong>path</strong> from start to<br />
end po<strong>in</strong>t through obstacles (i.e. a doma<strong>in</strong> without the outer boundary <strong>in</strong> MCD). Most of<br />
the algorithms related to SIP of obstacles handle polygonal boundaries, <strong>in</strong>clud<strong>in</strong>g a distance<br />
function approach [20]. For <strong>curved</strong> obstacles, [16] proposed the computation of visibility<br />
graph, assum<strong>in</strong>g the obstacles as convex curves. For disk obstacles, shortest <strong>path</strong> based on<br />
visibility graph and Dijkstra was proposed <strong>in</strong> [4]. Approach <strong>in</strong> [6] seems to be based on<br />
Voronoi diagram and it is well known that computation of the diagram is very difficult and<br />
not robust for arbitrary shaped curves. All the algorithms for <strong>curved</strong> obstacles appear to be<br />
theoretical <strong>in</strong> nature and no implementation results have been provided (<strong>in</strong> [17], an approach<br />
us<strong>in</strong>g grid-based approximation has been described used fast-sweep<strong>in</strong>g method <strong>in</strong> [22]).<br />
To use an algorithm such as Dijsktra for <strong>curved</strong> obstacles, visibility graph of the <strong>curved</strong> obstacles<br />
can be used. However, to compute the visibility graph, the footpo<strong>in</strong>ts of the PCTs/BTs<br />
are required. In our work, while traversal of the algorithm, all the potential <strong>path</strong>s are identified<br />
and hence the application of visibility graph and Dijkstra need not be computed.<br />
13