Spectral Optimization of the Suspension System of High-speed Trains
Spectral Optimization of the Suspension System of High-speed Trains
Spectral Optimization of the Suspension System of High-speed Trains

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
D. Younesian et al. 2009. Int. J. Vehicle Structures & <strong>System</strong>s, 1(4), 98-103<br />
four wheel sets, was proposed to cope with vertical,<br />
pitch and roll motions <strong>of</strong> <strong>the</strong> car body and trucks. The<br />
LQG control law using <strong>the</strong> acceleration feedback was<br />
adopted as <strong>the</strong> system controller, in which <strong>the</strong> state<br />
variables were estimated from <strong>the</strong> measurable<br />
accelerations with <strong>the</strong> Kalman estimator. Inter-vehicle<br />
active suspension for railway vehicles was proposed by<br />
Mei et al [7]. They developed a new optimization<br />
process for <strong>the</strong> design <strong>of</strong> vertical active suspension<br />
controllers using multi-objective genetic algorithm.<br />
Performance <strong>of</strong> neural network for <strong>the</strong> identification<br />
and optimal control <strong>of</strong> active pneumatic suspensions <strong>of</strong><br />
high-<strong>speed</strong> railway vehicles was studied by Nagai et al.<br />
in [8]. It was shown that neural networks can be<br />
efficiently trained to identify <strong>the</strong> dynamics <strong>of</strong> nonlinear<br />
pneumatic suspensions, as well as being trained to work<br />
as optimal nonlinear controllers. Zolotas et al. [9]<br />
presented a work on a set <strong>of</strong> novel strategies for<br />
achieving local tilt control, i.e. applied independently for<br />
each vehicle ra<strong>the</strong>r than <strong>the</strong> whole train precedence<br />
approach that is being commonly used. A linearized<br />
dynamic model was developed for a modern tilting<br />
railway vehicle with a tilt mechanism (tilting bolster)<br />
providing tilt below <strong>the</strong> secondary suspension.<br />
Surveying <strong>the</strong> literature shows that in most <strong>of</strong> <strong>the</strong><br />
published works just one <strong>of</strong> <strong>the</strong> objective functions <strong>of</strong><br />
ride quality or static strength <strong>of</strong> <strong>the</strong> suspension system<br />
have been solely taken into account because <strong>of</strong> <strong>the</strong><br />
simplification. The present paper is aimed to propose a<br />
technique to optimize <strong>the</strong> system simultaneously<br />
obtaining <strong>the</strong> desired ride quality and static strength.<br />
Fur<strong>the</strong>rmore, it should be noted that most <strong>of</strong> <strong>the</strong> works<br />
already done in this area are mainly dealing with <strong>the</strong><br />
optimization in <strong>the</strong> time domain. Consequently, in such<br />
optimization procedures, <strong>the</strong> obtained results severely<br />
become dependent on <strong>the</strong> nature <strong>of</strong> irregularly input<br />
data. In <strong>the</strong> present research, <strong>the</strong> corrugation pr<strong>of</strong>ile is<br />
simulated with its spectral density which intrinsically<br />
contains several sample data. In o<strong>the</strong>r words, <strong>the</strong> selected<br />
approach makes <strong>the</strong> procedure more general and reliable<br />
for variety <strong>of</strong> <strong>the</strong> irregularity inputs.<br />
A multi-variable optimization is carried out using<br />
<strong>the</strong> Genetic Algorithm. Four design parameters <strong>of</strong><br />
damping coefficient <strong>of</strong> <strong>the</strong> secondary and primary<br />
suspension as well as <strong>the</strong> wire diameter <strong>of</strong> <strong>the</strong>ir coil<br />
springs are obtained. Contribution <strong>of</strong> <strong>the</strong> paper is mainly<br />
directed to <strong>the</strong> new concepts <strong>of</strong> a) <strong>Optimization</strong> in<br />
random frequency domain which is more realistic, b)<br />
Combinational objective function simultaneously dealing<br />
with minimum body acceleration and maximum fatigue<br />
life. A parametric study is carried out and performance<br />
<strong>of</strong> <strong>the</strong> proposed optimal suspension system is evaluated<br />
for different values <strong>of</strong> <strong>the</strong> operational <strong>speed</strong>, corrugation<br />
level and also eccentricity <strong>of</strong> <strong>the</strong> wagon body. Effects <strong>of</strong><br />
positive and negative deviation with respect to <strong>the</strong><br />
optimal design parameters on <strong>the</strong> dynamic responses are<br />
<strong>the</strong>n studied.<br />
2. Ma<strong>the</strong>matical Modelling<br />
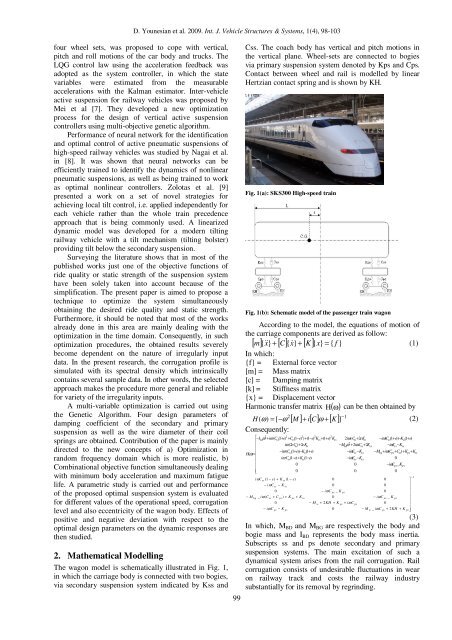
The wagon model is schematically illustrated in Fig. 1,<br />
in which <strong>the</strong> carriage body is connected with two bogies,<br />
via secondary suspension system indicated by Kss and<br />
99<br />
Css. The coach body has vertical and pitch motions in<br />
<strong>the</strong> vertical plane. Wheel-sets are connected to bogies<br />
via primary suspension system denoted by Kps and Cps.<br />
Contact between wheel and rail is modelled by linear<br />
Hertzian contact spring and is shown by KH.<br />
Fig. 1(a): SKS300 <strong>High</strong>-<strong>speed</strong> train<br />
Fig. 1(b): Schematic model <strong>of</strong> <strong>the</strong> passenger train wagon<br />
According to <strong>the</strong> model, <strong>the</strong> equations <strong>of</strong> motion <strong>of</strong><br />
<strong>the</strong> carriage components are derived as follow:<br />
[ m ] { & x&<br />
} + [ C]<br />
{ x&<br />
} + [ K]<br />
{ x}<br />
= { f }<br />
In which:<br />
(1)<br />
{f} = External force vector<br />
[m] = Mass matrix<br />
[c] = Damping matrix<br />
[k] = Stiffness matrix<br />
{x} = Displacement vector<br />
H ω can be <strong>the</strong>n obtained by<br />
Harmonic transfer matrix ( )<br />
[ ] [ ] [ ] 1<br />
2<br />
H( −<br />
) = [ −ω<br />
M + i C ω + K ]<br />
ω<br />
Consequently:<br />
(2)<br />
⎡ 2<br />
2 2 2 2<br />
−Ibdω<br />
+ iω<br />
( Css<br />
1( + e)<br />
+ Css(<br />
1−e)<br />
) + 1( −e)<br />
Kss<br />
+ ( 1+<br />
e)<br />
Kss<br />
2iωeC<br />
ss+<br />
2eK<br />
ss −iω(<br />
Css(<br />
1+<br />
e))<br />
−Kss<br />
( 1+<br />
e)<br />
⎢<br />
2<br />
⎢<br />
iω<br />
( 2eC<br />
ss)<br />
+ 2eK<br />
ss<br />
−Mbdω<br />
+ 2iωC<br />
ss+<br />
2Kss<br />
−iωC<br />
ss−Kss<br />
⎢<br />
−iω<br />
( Css(<br />
1+<br />
e))<br />
−Kss(<br />
1+<br />
e)<br />
−iωC<br />
ss−Kss<br />
−Mbg<br />
+ iω(<br />
Cps+<br />
Css)<br />
+ Kps<br />
+ Kss<br />
H(<br />
ω)<br />
= ⎢<br />
⎢<br />
iω<br />
Css(<br />
1−e)<br />
+ Kss(<br />
1−e)<br />
−iωC<br />
ss−Kss<br />
0<br />
⎢<br />
0<br />
0<br />
−iωC<br />
_<br />
⎢<br />
ps Kps<br />
⎢⎣<br />
0<br />
0<br />
0<br />
−1<br />
iωC<br />
ss ( 1 − e)<br />
+ K ss ( 1 − e)<br />
0<br />
0<br />
⎤<br />
− iωC<br />
0<br />
0<br />
⎥<br />
ss − K ss<br />
⎥<br />
0<br />
− iωC<br />
_<br />
0<br />
⎥<br />
ps K ps<br />
⎥<br />
− M bg _ iω(<br />
Css<br />
+ C ps ) + K ps + K ss<br />
0<br />
− iωC<br />
ps _ K ps ⎥<br />
0<br />
− M + 2 + +<br />
0<br />
⎥<br />
w KH K ps iωC<br />
ps<br />
⎥<br />
− iωC<br />
ps − K ps<br />
0<br />
− M w _ iωC<br />
ps + 2KH<br />
+ K ps ⎥⎦<br />
(3)<br />
In which, MBD and MBG are respectively <strong>the</strong> body and<br />
bogie mass and IBD represents <strong>the</strong> body mass inertia.<br />
Subscripts ss and ps denote secondary and primary<br />
suspension systems. The main excitation <strong>of</strong> such a<br />
dynamical system arises from <strong>the</strong> rail corrugation. Rail<br />
corrugation consists <strong>of</strong> undesirable fluctuations in wear<br />
on railway track and costs <strong>the</strong> railway industry<br />
substantially for its removal by regrinding.