Minimum-Transmission Broadcast in Uncoordinated ... - IEEE Xplore
Minimum-Transmission Broadcast in Uncoordinated ... - IEEE Xplore
Minimum-Transmission Broadcast in Uncoordinated ... - IEEE Xplore

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>IEEE</strong> TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 59, NO. 1, JANUARY 2010 307<br />
<strong>M<strong>in</strong>imum</strong>-<strong>Transmission</strong> <strong>Broadcast</strong> <strong>in</strong> Uncoord<strong>in</strong>ated<br />
Duty-Cycled Wireless Ad Hoc Networks<br />
Jue Hong, Jiannong Cao, Senior Member, <strong>IEEE</strong>, Wenzhong Li, Member, <strong>IEEE</strong>,<br />
Sanglu Lu, Member, <strong>IEEE</strong>, and Daoxu Chen, Member, <strong>IEEE</strong><br />
Abstract—<strong>Broadcast</strong> is a fundamental operation of wireless<br />
ad hoc networks (WANETs) and has widely been studied over the<br />
past few decades. However, most exist<strong>in</strong>g broadcast<strong>in</strong>g strategies<br />
assume nonsleep<strong>in</strong>g wireless nodes and thus are not suitable for<br />
uncoord<strong>in</strong>ated duty-cycled WANETs, <strong>in</strong> which each node periodically<br />
switches on and off to save energy. In this paper, we<br />
study the m<strong>in</strong>imum-transmission broadcast problem <strong>in</strong> uncoord<strong>in</strong>ated<br />
duty-cycled WANETs (MTB-UD problem) and prove its<br />
NP-hardness. We show that modifications of exist<strong>in</strong>g broadcast<br />
approaches can only provide a l<strong>in</strong>ear approximation ratio of O(n)<br />
(where n is the number of nodes <strong>in</strong> the network). We propose<br />
a novel set-cover-based approximation (SCA) scheme with both<br />
centralized and distributed approximation algorithms. The centralized<br />
SCA (CSCA) algorithm has a logarithmic approximation<br />
ratio of 3(ln Δ + 1) and time complexity of O(n3 ) (Δ is the<br />
maximum degree of the network). The distributed SCA (DSCA)<br />
algorithm has a constant approximation ratio of at most 20 while<br />
keep<strong>in</strong>g both l<strong>in</strong>ear time and message complexities. We have<br />
conducted both theoretical analysis and simulations to evaluate<br />
the performance of the proposed algorithms. Results show that<br />
both the CSCA and DSCA algorithms outperform the modified<br />
versions of exist<strong>in</strong>g broadcast approaches by at least 50%.<br />
Index Terms—Approximation algorithm, duty cycle, m<strong>in</strong>imumtransmission<br />
broadcast (MTB), NP hard, wireless ad hoc network<br />
(WANET).<br />
I. INTRODUCTION<br />
ENERGY conservation is an important issue <strong>in</strong> wireless<br />
ad hoc networks (WANETs). Studies have shown that<br />
nodes spend most of the time on idle listen<strong>in</strong>g, which is a<br />
significant consumer of power [1]–[3]. To avoid idle listen<strong>in</strong>g<br />
and to conserve energy, many WANETs employ the uncoord<strong>in</strong>ated<br />
duty-cycled approach, <strong>in</strong> which each node periodically<br />
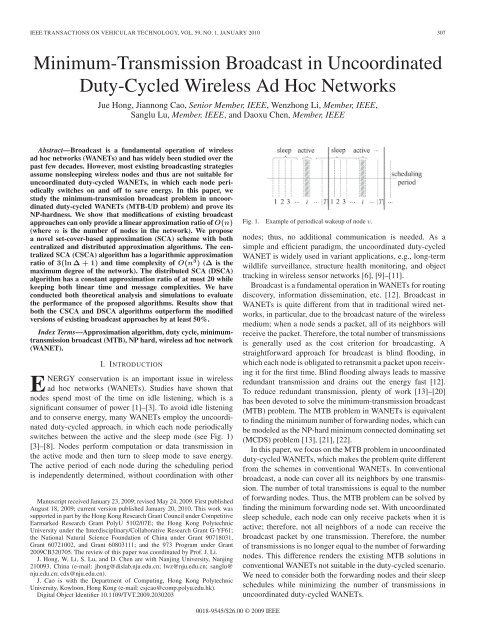
switches between the active and the sleep mode (see Fig. 1)<br />
[3]–[8]. Nodes perform computation or data transmission <strong>in</strong><br />
the active mode and then turn to sleep mode to save energy.<br />
The active period of each node dur<strong>in</strong>g the schedul<strong>in</strong>g period<br />
is <strong>in</strong>dependently determ<strong>in</strong>ed, without coord<strong>in</strong>ation with other<br />
Manuscript received January 23, 2009; revised May 24, 2009. First published<br />
August 18, 2009; current version published January 20, 2010. This work was<br />
supported <strong>in</strong> part by the Hong Kong Research Grant Council under Competitive<br />
Earmarked Research Grant PolyU 5102/07E; the Hong Kong Polytechnic<br />
University under the Interdiscipl<strong>in</strong>ary/Collaborative Research Grant G-YF61;<br />
the National Natural Science Foundation of Ch<strong>in</strong>a under Grant 90718031,<br />
Grant 60721002, and Grant 60803111; and the 973 Program under Grant<br />
2009CB320705. The review of this paper was coord<strong>in</strong>ated by Prof. J. Li.<br />
J. Hong, W. Li, S. Lu, and D. Chen are with Nanj<strong>in</strong>g University, Nanj<strong>in</strong>g<br />
210093, Ch<strong>in</strong>a (e-mail: jhong@dislab.nju.edu.cn; lwz@nju.edu.cn; sanglu@<br />
nju.edu.cn; cdx@nju.edu.cn).<br />
J. Cao is with the Department of Comput<strong>in</strong>g, Hong Kong Polytechnic<br />
University, Kowloon, Hong Kong (e-mail: csjcao@comp.polyu.edu.hk).<br />
Digital Object Identifier 10.1109/TVT.2009.2030203<br />
0018-9545/$26.00 © 2009 <strong>IEEE</strong><br />
Fig. 1. Example of periodical wakeup of node v.<br />
nodes; thus, no additional communication is needed. As a<br />
simple and efficient paradigm, the uncoord<strong>in</strong>ated duty-cycled<br />
WANET is widely used <strong>in</strong> variant applications, e.g., long-term<br />
wildlife surveillance, structure health monitor<strong>in</strong>g, and object<br />
track<strong>in</strong>g <strong>in</strong> wireless sensor networks [6], [9]–[11].<br />
<strong>Broadcast</strong> is a fundamental operation <strong>in</strong> WANETs for rout<strong>in</strong>g<br />
discovery, <strong>in</strong>formation dissem<strong>in</strong>ation, etc. [12]. <strong>Broadcast</strong> <strong>in</strong><br />
WANETs is quite different from that <strong>in</strong> traditional wired networks,<br />
<strong>in</strong> particular, due to the broadcast nature of the wireless<br />
medium; when a node sends a packet, all of its neighbors will<br />
receive the packet. Therefore, the total number of transmissions<br />
is generally used as the cost criterion for broadcast<strong>in</strong>g. A<br />
straightforward approach for broadcast is bl<strong>in</strong>d flood<strong>in</strong>g, <strong>in</strong><br />
which each node is obligated to retransmit a packet upon receiv<strong>in</strong>g<br />
it for the first time. Bl<strong>in</strong>d flood<strong>in</strong>g always leads to massive<br />
redundant transmission and dra<strong>in</strong>s out the energy fast [12].<br />
To reduce redundant transmission, plenty of work [13]–[20]<br />
has been devoted to solve the m<strong>in</strong>imum-transmission broadcast<br />
(MTB) problem. The MTB problem <strong>in</strong> WANETs is equivalent<br />
to f<strong>in</strong>d<strong>in</strong>g the m<strong>in</strong>imum number of forward<strong>in</strong>g nodes, which can<br />
be modeled as the NP-hard m<strong>in</strong>imum connected dom<strong>in</strong>at<strong>in</strong>g set<br />
(MCDS) problem [13], [21], [22].<br />
In this paper, we focus on the MTB problem <strong>in</strong> uncoord<strong>in</strong>ated<br />
duty-cycled WANETs, which makes the problem quite different<br />
from the schemes <strong>in</strong> conventional WANETs. In conventional<br />
broadcast, a node can cover all its neighbors by one transmission.<br />
The number of total transmissions is equal to the number<br />
of forward<strong>in</strong>g nodes. Thus, the MTB problem can be solved by<br />
f<strong>in</strong>d<strong>in</strong>g the m<strong>in</strong>imum forward<strong>in</strong>g node set. With uncoord<strong>in</strong>ated<br />
sleep schedule, each node can only receive packets when it is<br />
active; therefore, not all neighbors of a node can receive the<br />
broadcast packet by one transmission. Therefore, the number<br />
of transmissions is no longer equal to the number of forward<strong>in</strong>g<br />
nodes. This difference renders the exist<strong>in</strong>g MTB solutions <strong>in</strong><br />
conventional WANETs not suitable <strong>in</strong> the duty-cycled scenario.<br />
We need to consider both the forward<strong>in</strong>g nodes and their sleep<br />
schedules while m<strong>in</strong>imiz<strong>in</strong>g the number of transmissions <strong>in</strong><br />
uncoord<strong>in</strong>ated duty-cycled WANETs.
308 <strong>IEEE</strong> TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 59, NO. 1, JANUARY 2010<br />
A. Related Work<br />
Data-transmission issues <strong>in</strong> duty-cycled WANETs have recently<br />
attracted much of researchers’ attention. Dousse et al. [7]<br />
established a bound on the transmission latency of sensor<br />
networks with uncoord<strong>in</strong>ated schedule. Lu et al. proved the<br />
NP-hardness of m<strong>in</strong>imiz<strong>in</strong>g end-to-end communication delay<br />
<strong>in</strong> low-duty-cycle sensor networks <strong>in</strong> [23]. Cao et al. proposed<br />
the pipel<strong>in</strong>e forward<strong>in</strong>g pattern for sensor networks with a<br />
sleep<strong>in</strong>g schedule to decrease the delay [24]. Keshavarzian et al.<br />
analyzed the delay of several known wake-up patterns and<br />
proposed a new multiparent schedul<strong>in</strong>g pattern for sensor networks<br />
<strong>in</strong> [25]. Gu and He proposed a dynamic data forward<strong>in</strong>g<br />
scheme for extremely low-duty-cycle sensor networks based on<br />
the expected latency and reliability model [26]. However, these<br />
works ma<strong>in</strong>ly focus on the latency issue caused by the sleep<br />
schedule, and none of them refer to the broadcast problem.<br />
Much effort has been made to m<strong>in</strong>imize the number of<br />
transmissions of broadcast <strong>in</strong> conventional WANETs. These<br />
works can ma<strong>in</strong>ly be classified <strong>in</strong>to tree- and MCDS-based<br />
schemes. Chlamtac and Kutten proved that the MTB problem<br />
is NP-hard and proposed to reduce the broadcast redundancy<br />
us<strong>in</strong>g the tree-based scheme [13]. In [15]–[17], the authors<br />
<strong>in</strong>troduced the MCDS-based scheme and proposed a virtual<br />
backbone-based broadcast. Lou and Wu [14] improved the<br />
Dom<strong>in</strong>ant Prun<strong>in</strong>g scheme by utiliz<strong>in</strong>g two-hop neighborhood<br />
<strong>in</strong>formation to reduce transmission. Localized algorithms based<br />
on the multipo<strong>in</strong>t relay (MPR) scheme (e.g., MPR, extended<br />
MPR, and extended source-<strong>in</strong>dependent MPR) have been designed,<br />
whose local approximation ratios are logarithmic or<br />
constant [18], [20], [27]. Wu and Lou proposed the quasi-local<br />
forward-node-set-based scheme <strong>in</strong> [19], which outperforms the<br />
MPR and dom<strong>in</strong>ant prun<strong>in</strong>g schemes. As the core of solutions<br />
to the MTB problem, extensive work has been done to f<strong>in</strong>d a<br />
good approximation of MCDS <strong>in</strong> terms of small approximation<br />
ratio and to design distributed algorithms <strong>in</strong> WANETs. Das and<br />
Bharghavan proposed a distributed algorithm <strong>in</strong> [16] based on<br />
the work of Guha and Khuller [28], which has an approximation<br />
ratio of 3H(Δ). The approximation ratio of the node-prun<strong>in</strong>g<br />
scheme proposed <strong>in</strong> [17] is n/2. Wanet al. proposed an eightapproximation<br />
distributed algorithm <strong>in</strong> [29]. Li et al. improved<br />
the approximation ratio to 4.8+ln5[30]. Recently, Wan et al.<br />
further improved the approximation ratio to 6.8 with a twophase<br />
approach [31]. However, all these approaches are based<br />
on the broadcast nature of the wireless medium and thus are not<br />
suitable for duty-cycled WANETs.<br />
Recently, some research work has emerged, explor<strong>in</strong>g the<br />
broadcast problem <strong>in</strong> duty-cycled WANETs. Miller et al. proposed<br />
a probability-based broadcast approach on the mediumaccess<br />
control (MAC) layer, which can be <strong>in</strong>tegrated <strong>in</strong>to<br />
any sleep-schedul<strong>in</strong>g protocol <strong>in</strong> [32]. However, they did not<br />
focus on network-wide <strong>in</strong>teractions. Wang and Liu first def<strong>in</strong>ed<br />
the duty-cycle-aware broadcast problem and then proposed a<br />
centralized optimal solution and a distributed heuristic solution<br />
based on the dynamic programm<strong>in</strong>g approach <strong>in</strong> [33]. Different<br />
from the two works, <strong>in</strong> this paper, we specifically address the<br />
MTB problem <strong>in</strong> duty-cycled WANETs, provid<strong>in</strong>g theoretical<br />
analysis of its hardness and propos<strong>in</strong>g provable solutions.<br />
B. Our Contributions<br />
In uncoord<strong>in</strong>ated duty-cycled WANETs, the number of total<br />
transmissions <strong>in</strong> broadcast depends on not only the number<br />
of forward<strong>in</strong>g nodes but also their sleep schedules. These two<br />
issues should be addressed together when formulat<strong>in</strong>g the MTB<br />
problem <strong>in</strong> uncoord<strong>in</strong>ated duty-cycled WANETs. Based on exist<strong>in</strong>g<br />
broadcast<strong>in</strong>g approaches used <strong>in</strong> conventional WANETs,<br />
two modified schemes, i.e., the modified tree-based and modified<br />
MCDS-based schemes, can be implemented for the MTB<br />
problem <strong>in</strong> duty-cycled WANETs. However, we show that both<br />
schemes have l<strong>in</strong>ear approximation ratios and thus cannot guarantee<br />
to generate solutions with a small number of transmissions.<br />
Therefore, we proposed a novel set cover approximation<br />
scheme and, based on this scheme, designed a centralized<br />
algorithm and a distributed algorithm that can efficiently solve<br />
the MTB <strong>in</strong> uncoord<strong>in</strong>ated duty-cycled WANETs.<br />
We make four contributions <strong>in</strong> this paper.<br />
1) We formulate the MTB problem <strong>in</strong> uncoord<strong>in</strong>ated dutycycled<br />
WANETs (MTB-UD problem) and prove its NPhardness.<br />
This implies that there are no efficient broadcast<br />
algorithms to m<strong>in</strong>imize the number of transmissions of<br />
broadcast <strong>in</strong> uncoord<strong>in</strong>ated duty-cycled WANETs, unless<br />
P = NP.<br />
2) We show that modifications <strong>in</strong> exist<strong>in</strong>g broadcast<strong>in</strong>g approaches<br />
for the MTB-UD problem cannot guarantee the<br />
provision of good solutions and then propose the setcover-based<br />
approximation (SCA) scheme as a better<br />
solution.<br />
3) We propose a centralized SCA (CSCA) algorithm with<br />
3(ln Δ + 1)-approximation ratio and O(n3 ) time complexity<br />
(Δ is the maximum degree of the network).<br />
4) We propose a distributed SCA (DSCA) algorithm with<br />
a constant approximation ratio and both l<strong>in</strong>ear time and<br />
message complexities.<br />
The rest of this paper is organized as follows: Section II<br />
<strong>in</strong>troduces the network model, assumptions, and problem<br />
formulation. In Section III, we present and analyze two modifications<br />
of exist<strong>in</strong>g broadcast<strong>in</strong>g approaches, i.e., the modified<br />
tree-based and modified MCDS-based schemes. A novel<br />
SCA scheme is proposed <strong>in</strong> Section IV, and based on it, we<br />
devise a centralized algorithm and a distributed algorithm. In<br />
Section V, we evaluate the performance of the proposed algorithms<br />
by theoretical analyses and simulations. We briefly<br />
discuss some related issues of the broadcast problem for dutycycled<br />
WANETs <strong>in</strong> Section VI and conclude this paper <strong>in</strong><br />
Section VII.<br />
II. PRELIMINARIES<br />
Before giv<strong>in</strong>g the formal statement of the MTB problem <strong>in</strong><br />
duty-cycled WANETs, we first present the network model and<br />
assumptions.<br />
A. Network Model and Assumptions<br />
Table I summarizes the most frequently used notations <strong>in</strong> this<br />
paper. Let V be the set of nodes of a WANET; we assume that
HONG et al.: MTB IN UNCOORDINATED DUTY-CYCLED WANETs 309<br />
TABLE I<br />
NOTATIONS<br />
n = |V | nodes are distributed <strong>in</strong> a 2-D plane and have equal<br />
maximum transmitt<strong>in</strong>g ranges of one unit. The topology of the<br />
network is modeled as a connected UDGG(V,E). An edge<br />
{u, v} ∈E iff the distance between nodes u and v is with<strong>in</strong><br />
each other’s communication range. Each node is assigned a<br />
unique ID.<br />
Unlike literature focus<strong>in</strong>g on tun<strong>in</strong>g the sleep schedule<br />
[23]–[25], we follow the assumption for uncoord<strong>in</strong>ated dutycycled<br />
WANETs <strong>in</strong> [7] and [26], where each node determ<strong>in</strong>es<br />
its sleep schedule to be completely uncoord<strong>in</strong>ated. We assume<br />
that the schedule period T is divided <strong>in</strong>to |T | time slots with<br />
fixed and equal lengths, which are denoted by 1, 2,...,|T |<br />
accord<strong>in</strong>gly. Follow<strong>in</strong>g a very common sett<strong>in</strong>g, we assume<br />
that each node randomly chooses an active time slot i ∈ T<br />
<strong>in</strong>dependently. Each time slot is assumed to be long enough<br />
for send<strong>in</strong>g or receiv<strong>in</strong>g one data packet. The channel contention<br />
and collision avoidance are handled by underly<strong>in</strong>g MAC<br />
protocols, such as S-MAC [1]. Thus, we do not consider the<br />
collision issue <strong>in</strong> this paper. Each node becomes active at a<br />
specific time slot, which is denoted as SLa(v). Follow<strong>in</strong>g the<br />
sett<strong>in</strong>gs <strong>in</strong> [26], a node can wake up and transmit a packet at<br />
any time slot but can receive packets only at its active time<br />
slot. We denote the send<strong>in</strong>g time-slot set of node v by SLs(v).<br />
The global time synchronization is achieved by protocols such<br />
as the Flood<strong>in</strong>g Time Synchronization Protocol [34] <strong>in</strong> this<br />
paper.<br />
B. Problem Formulation<br />
We consider the s<strong>in</strong>gle-source broadcast session, <strong>in</strong> which a<br />
predef<strong>in</strong>ed source node s broadcasts the data packets to all other<br />
nodes. A broadcast backbone B(G) on G(V,E) is def<strong>in</strong>ed as<br />
a set of forward<strong>in</strong>g nodes of V . Data packets are conveyed<br />
along the broadcast backbone to all nodes <strong>in</strong> the network. Let<br />
a pair (u, SLs(u)) <strong>in</strong>dicate that node u transmits at time slots<br />
<strong>in</strong> SLs(u). We def<strong>in</strong>e a broadcast schedule on a backbone B<br />
as BS(B), which can be expressed as a series of pairs, i.e.,<br />
(u, SLs(u)) (u ∈ B).<br />
An example of the MTB problem <strong>in</strong> uncoord<strong>in</strong>ated dutycycled<br />
WANETs is shown <strong>in</strong> Fig. 2, which demonstrates<br />
a WANET with two different time slots. The objective of<br />
the conventional MTB problem is to f<strong>in</strong>d the MCDS for<br />
G, e.g., {s, v, x} or {s, w, y} <strong>in</strong> this example. Without consider<strong>in</strong>g<br />
the broadcast schedule, both solutions are regarded<br />
as equivalent and have the number of total transmissions<br />
equal to three. However, the broadcast backbone of {s, v, x}<br />
Fig. 2. Uncoord<strong>in</strong>ated duty-cycled WANET with a schedule period of<br />
length two.<br />
needs at least four transmissions to cover all nodes with the<br />
schedule of {(s, {2}), (v, {1, 2}), (x, {2})}, whereas the other<br />
broadcast backbone {s, w, y} with the broadcast schedule of<br />
{(s, {1}), (w, {2}), (y, {1})} needs only three transmissions to<br />
cover all nodes.<br />
This <strong>in</strong>stance reveals that the number of total transmissions<br />
<strong>in</strong> a broadcast session <strong>in</strong> uncoord<strong>in</strong>ated duty-cycled WANETs<br />
depends on not only the broadcast backbone but the correspond<strong>in</strong>g<br />
broadcast schedule as well. Therefore, the def<strong>in</strong>ition and<br />
the solutions of the conventional MTB problem are no longer<br />
suitable <strong>in</strong> this case.<br />
Based on the aforementioned model, we reformulate the<br />
MTB problem <strong>in</strong> uncoord<strong>in</strong>ated duty-cycled WANETs as<br />
follows:<br />
Def<strong>in</strong>ition 1—MTB-UD Problem: Given a WANET<br />
G(V,E), f<strong>in</strong>d a broadcast backbone B(G) and a broadcast<br />
schedule BS(B) so that the total transmission <br />
v∈B |SLs(v)|<br />
is m<strong>in</strong>imized.<br />
Theorem 1: The MTB-UD Problem is NP-Hard:<br />
Proof: It has been proven that the MCDS problem is<br />
NP-hard <strong>in</strong> both general and unit disk graphs [21], [22]. We<br />
prove the NP-hardness of the MTB-UD problem by show<strong>in</strong>g<br />
that the MCDS problem can be mapped to one of its special<br />
cases. Consider a special case of the MTB-UD problem where<br />
|T | =1, i.e., the length of the schedul<strong>in</strong>g period is only one<br />
time slot. Thus, all nodes <strong>in</strong> the network wake up at the same<br />
active time slot. In this case, the solution of the problem is<br />
an MCDS of the graph, which is exactly the MCDS problem.<br />
Hence, the MTB-UD problem is NP-hard. <br />
We conclude this section by present<strong>in</strong>g two useful<br />
def<strong>in</strong>itions.<br />
Def<strong>in</strong>ition 2—Independent Set (IS): An IS of a graph G is a<br />
set of vertices <strong>in</strong> G, no two of which are adjacent.<br />
Def<strong>in</strong>ition 3—Set Cover: Given a set U and a family S of<br />
subsets of U, a set cover is a subfamily C ⊆ S of sets, whose<br />
union is U.<br />
Accord<strong>in</strong>gly, the <strong>M<strong>in</strong>imum</strong> Set Cover problem is to f<strong>in</strong>d the<br />
m<strong>in</strong>imum set cover C for U, which is NP-hard [21].<br />
III. MODIFIED TREE- AND MCDS-BASED SCHEMES<br />
FOR THE MTB-UD PROBLEM<br />
As mentioned before, conventional broadcast algorithms<br />
have not considered the sleep-schedule issue and, thus, are not<br />
suitable for duty-cycled WANETs. In this section, based on
310 <strong>IEEE</strong> TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 59, NO. 1, JANUARY 2010<br />
Fig. 3. Special case of duty-cycled WANET, <strong>in</strong> which all nodes with active<br />
time slot i are connected to node vi−1. (Nodes with active time slot 1 are<br />
connected to s.)<br />
modification of exist<strong>in</strong>g solutions for broadcast <strong>in</strong> conventional<br />
WANETs, we present two broadcast schemes for the MTB-UD<br />
problem. The two schemes are called the modified tree-based<br />
scheme and the modified MCDS-based scheme. However, as<br />
we will show later, these two schemes cannot produce quality<br />
solutions, because they do not explore the characteristics of<br />
transmission <strong>in</strong> uncoord<strong>in</strong>ated duty-cycled WANETs.<br />
A. Modified Tree-Based Scheme<br />
The modified tree-based scheme orig<strong>in</strong>ated from the wellknown<br />
basic tree-based broadcast for conventional WANETs<br />
[35]. The basic tree-based broadcast can be stated as follows:<br />
Generate a spann<strong>in</strong>g tree of the network G rooted <strong>in</strong> the<br />
source node s; the broadcast will f<strong>in</strong>ish while each node on<br />
this tree sends packets to all its children one by one. Obviously,<br />
this scheme can be utilized for solv<strong>in</strong>g the MTB-UD<br />
problem with m<strong>in</strong>or modification, i.e., each transmission is<br />
scheduled at the active time slot of the receiver. The number<br />
of total transmissions of the modified tree-based scheme is<br />
exactly n − 1.<br />
Next, we show the approximation ratio of the modified<br />
tree-based scheme. Consider the case <strong>in</strong> Fig. 3, <strong>in</strong> which all<br />
nodes with active time slot i(i ∈ T ) are the children of the<br />
root s or node vi−1. In this case, the m<strong>in</strong>imum number of total<br />
transmissions of broadcast is |T ′ |(T ′ = <br />
v∈V SLa(v)), which<br />
is a trivial lower bound of the number of total transmissions.<br />
The correspond<strong>in</strong>g broadcast backbone is {s, v1,...,v |T ′ |−1},<br />
and the broadcast schedule is {(s, {1}), (v1, {2}),...,<br />
(v |T ′ |−1, |T ′ |)}. Meanwhile, the modified tree-based scheme<br />
generates a solution of n − 1 transmissions. The follow<strong>in</strong>g<br />
theorem shows the approximation ratio.<br />
Theorem 2: The approximation ratio of the modified treebased<br />
scheme is n − 1/|T ′ |.<br />
Proof: Based on the preced<strong>in</strong>g discussion, this theorem<br />
straightforwardly holds. <br />
All the children nodes with identical active time slots of the<br />
same parent node can receive the packet by one transmission.<br />
Thus, the number of total transmissions can further be reduced<br />
if each parent node transmits accord<strong>in</strong>g to the active time slots<br />
of its children. In this case, the number of total transmissions<br />
depends on the shape of the broadcast tree and the sleep<br />
schedule of each node. This improv<strong>in</strong>g issue is employed <strong>in</strong><br />
the follow<strong>in</strong>g modified MCDS-based scheme.<br />
B. Modified MCDS-Based Scheme<br />
The solutions to the conventional MTB problem are to f<strong>in</strong>d an<br />
MCDS <strong>in</strong> the WANETs. In addition, with m<strong>in</strong>or modification,<br />
we derive the modified MCDS-based scheme for the MTB-UD<br />
problem. Denote by T (v) the set of active time slots of nodes <strong>in</strong><br />
Disk(v). The modified MCDS-based scheme can be stated as<br />
follows: F<strong>in</strong>d an MCDS of the WANET; then, for each node v<br />
<strong>in</strong> the MCDS, transmit at time slots <strong>in</strong> T (v). In the modified<br />
MCDS-based scheme, nodes with identical active time slots<br />
<strong>in</strong> Disk(v) can receive the packet by only one transmission<br />
from node v, whereas, <strong>in</strong> the tree-based scheme, they can<br />
only receive the packet one by one. Theorem 3 derives the<br />
approximation ratio of the modified MCDS-based scheme.<br />
Theorem 3: The approximation ratio of the MCDS-based<br />
scheme is m<strong>in</strong>(Δ, |T |).<br />
Proof: Denote the size of the MCDS by #MCDS, which<br />
is another trivial lower bound of the number of total transmissions.<br />
Denot<strong>in</strong>g the number of transmissions <strong>in</strong> the optimal<br />
solution to the MTB-UD problem by OPT, wehaveOPT <br />
#MCDS. In the modified MCDS-based scheme, each node v<br />
<strong>in</strong> the MCDS transmits |T (v)| times. Thus, the number of total<br />
transmissions <strong>in</strong> the modified MCDS-based scheme is<br />
<br />
|T (v)| max (|T (v)|)#MCDS<br />
v∈MCDS<br />
v∈MCDS<br />
m<strong>in</strong> (Δ, |T |)OPT.<br />
However, to f<strong>in</strong>d the MCDS of a WANET is an NP-hard<br />
problem, and only suboptimal solutions are available. Therefore,<br />
the actual approximation ratio of the algorithms derived<br />
from the modified MCDS-based scheme is β m<strong>in</strong>(Δ, |T |),<br />
where β is the approximation ratio of the size of the MCDS.<br />
In summary, the modified tree-based scheme is simple to<br />
implement but may perform poorly <strong>in</strong> a large-scale network<br />
for the O(n) approximation ratio. The modified MCDS-based<br />
scheme may perform poorly <strong>in</strong> networks with high density or a<br />
long schedule period for the max(Δ, |T |) approximation ratio.<br />
It also holds that max(Δ, |T |) ∈ O(n), because Δ ∈ O(n).<br />
Although the two schemes are straightforward, they neither<br />
explore the characteristic of duty-cycled WANETs nor provide<br />
a reasonable solution to the MTB-UD problem.<br />
IV. PROPOSED SET-COVER-BASED SOLUTIONS<br />
FOR MTB-UD PROBLEM<br />
In this section, we present the design of our SCA scheme.<br />
Based on this scheme, a centralized and a distributed algorithm<br />
are proposed.<br />
A. SCA Scheme<br />
In uncoord<strong>in</strong>ated duty-cycled WANETs, the transmission at<br />
time slot i does not affect the transmission at time slot j if<br />
i = j. This implies that we can decrease the total transmission
HONG et al.: MTB IN UNCOORDINATED DUTY-CYCLED WANETs 311<br />
by m<strong>in</strong>imiz<strong>in</strong>g the transmission on each set of nodes with identical<br />
active time slots. Our proposed SCA scheme is designed<br />
based on this fact.<br />
S<strong>in</strong>ce the network can be modeled as a UDG, for each<br />
node v ∈ V , we denote Covi(v) as the set of the nodes<br />
<strong>in</strong> Disk(v) with active time slot i, i.e., Covi(v) ={u|u ∈<br />
Disk(v) ∧ SLa(u) =i}. It is obvious that all the nodes <strong>in</strong><br />
Covi(v) will receive the packet by one transmission from node<br />
v at time slot i. The nodes <strong>in</strong> Covi(v) are said to be covered<br />
by node v, and v is called a cover<strong>in</strong>g node. The SCA scheme<br />
consists of two phases.<br />
1) Phase I (F<strong>in</strong>d the m<strong>in</strong>imum cover<strong>in</strong>g node set.): Group<br />
all nodes with active time slot i <strong>in</strong> the WANET G(V,E)<br />
<strong>in</strong>to sets Ui(i ∈ T ), and then try to f<strong>in</strong>d a m<strong>in</strong>imum<br />
cover<strong>in</strong>g node set Ci <br />
for each Ui, respectively, such that<br />
v∈Ci Covi(v) =Ui;<br />
2) Phase II (Construct the backbone.): Establish a backbone<br />
consist<strong>in</strong>g of all the cover<strong>in</strong>g nodes <strong>in</strong> <br />
i∈T Ci, source<br />
node s, and some <strong>in</strong>termediate connectors.<br />
Phase I actually f<strong>in</strong>ds the m<strong>in</strong>imum set cover {Covi(v)}<br />
for Ui. The broadcast schedule can be obta<strong>in</strong>ed dur<strong>in</strong>g the<br />
two phases. The SCA scheme also establishes another lower<br />
bound on the number of total transmissions: Given a WANET of<br />
G(V,E) and the schedul<strong>in</strong>g period T , denot<strong>in</strong>g the number of<br />
transmissions <strong>in</strong> the optimal solution to the MTB-UD problem<br />
by OPT,wehave<br />
OPT <br />
m<strong>in</strong> |Ci|. (1)<br />
i∈T<br />
Based on the SCA scheme, we can design various algorithms<br />
with different implementations of the two phases. Here, we<br />
propose a CSCA algorithm and a DSCA algorithm to solve the<br />
problem.<br />
B. CSCA Algorithm<br />
Follow<strong>in</strong>g the SCA scheme, the CSCA consists of two<br />
phases. Among various centralized algorithms for the m<strong>in</strong>imum<br />
set cover problem, the simple greedy strategy is the most frequently<br />
used, because it provides a logarithmic approximation<br />
ratio with a lower time complexity of O(n2 ), compared with<br />
the others. Therefore, we implement phase I of the CSCA<br />
us<strong>in</strong>g the greedy strategy. In phase II of the CSCA, we construct<br />
the backbone based on the traversal of G, which is a<br />
common algorithm for generat<strong>in</strong>g spann<strong>in</strong>g trees. The detailed<br />
algorithm is described as follows. The pseudo code is shown <strong>in</strong><br />
Algorithm 1.<br />
1) Phase I—F<strong>in</strong>d the <strong>M<strong>in</strong>imum</strong> Cover<strong>in</strong>g Node Set: In this<br />
phase, we try to f<strong>in</strong>d the m<strong>in</strong>imum Ci for each Ui us<strong>in</strong>g<br />
the greedy strategy. The greedy algorithm from [36] yields a<br />
solution with the approximation ratio of ln d +1, where d is the<br />
maximum size of Covi(v). The greedy algorithm for f<strong>in</strong>d<strong>in</strong>g the<br />
m<strong>in</strong>imum cover<strong>in</strong>g node set Ci is briefly described here.<br />
Step 1) Ci ←∅, J ← V , and I ← Ui.<br />
Step 2) Select a node v = arg maxv∈J |Covi(v)|.<br />
Step 3) Ci ← Ci ∪{v}, J ← J \{v}, and I ← I \<br />
Covi(v).<br />
Step 4) If I = ∅, stop, and output Ci. Else, go to Step 2.<br />
Algorithm 1. CSCA Algorithm<br />
For each v ∈ Ci, we ma<strong>in</strong>ta<strong>in</strong> a set SLb(v) conta<strong>in</strong><strong>in</strong>g the<br />
time slot i. The existence of i <strong>in</strong> SLb(v) <strong>in</strong>dicates that node v<br />
is a cover<strong>in</strong>g node for Ui.<br />
2) Phase II—Construct the Backbone: To construct the<br />
broadcast backbone, we connect all nodes <strong>in</strong> <br />
i∈T Ci to the<br />
source node s. The backbone can be extracted dur<strong>in</strong>g the formation<br />
of a spann<strong>in</strong>g tree Tbcast on G. Initially, Tbcast is set to<br />
{s}, and a work<strong>in</strong>g set Temp is set to <br />
i∈T Ci. The process<br />
given here is executed.<br />
1) Traverse all elements <strong>in</strong> Temp, and pick the first-found<br />
Covi(v) satisfy<strong>in</strong>g one of the four conditions <strong>in</strong> Fig. 4.<br />
The existence of Covi(v) is guaranteed by Lemma 1.<br />
2) Connect all nodes <strong>in</strong> Covi(v) to v, and then, connect v to<br />
Tbcast, consider<strong>in</strong>g the four cases <strong>in</strong> Fig. 4.<br />
Case 1. v is <strong>in</strong> Tbcast: No operation is needed.<br />
Case 2. v is adjacent to some node u <strong>in</strong> Tbcast: Connect<br />
u to v.<br />
Case 3. There exists a node x <strong>in</strong> Covi(v) ∩ Tbcast:<br />
Connect x to v.<br />
Case 4. There exists a node x <strong>in</strong> Covi(v) that is adjacent<br />
to some node u <strong>in</strong> Tbcast: Connect x to u.<br />
3) If all Covi(v) (i∈ T ) related to node v have been<br />
processed, remove v from Temp.<br />
4) Repeat Steps 1)–3) until Temp = ∅.<br />
Eventually, the source node s, all nodes v <strong>in</strong> <br />
i∈T Ci, and<br />
all the connectors form the backbone B, and the pair series<br />
(v, SLs(v))(v ∈ B) form the BS(B).<br />
In the rema<strong>in</strong><strong>in</strong>g part of this section, we provide theoretical<br />
analysis of the performance of the CSCA algorithm <strong>in</strong> terms
312 <strong>IEEE</strong> TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 59, NO. 1, JANUARY 2010<br />
Fig. 4. Four cases of connect<strong>in</strong>g a Covi(v) to the exist<strong>in</strong>g Tbcast through v.<br />
Black nodes are connectors.<br />
of the number of transmissions and time complexity. We first<br />
present an importance property of the CSCA algorithm.<br />
Lemma 1: All nodes <strong>in</strong> the Covi(v) found <strong>in</strong> each iteration<br />
of the backbone-construct<strong>in</strong>g phase can be covered from the<br />
exist<strong>in</strong>g Tbcast by no more than three transmissions.<br />
Proof: After phase I of the CSCA algorithm, each node is<br />
a cover<strong>in</strong>g node <strong>in</strong> <br />
i∈T Ci, is covered by some node, or both.<br />
The connectedness of G guarantees that we can f<strong>in</strong>d a Covi(v)<br />
satisfy<strong>in</strong>g one of the four cases demonstrated <strong>in</strong> Fig. 4. All<br />
nodes <strong>in</strong> the Covi(v) can be connected to the exist<strong>in</strong>g Tbcast,<br />
as shown <strong>in</strong> Fig. 4. The number of transmissions <strong>in</strong> each case<br />
can be calculated as given here.<br />
1) Case 1: Node v is <strong>in</strong> the exist<strong>in</strong>g Tbcast; thus, all nodes<br />
<strong>in</strong> Covi(v) can be covered by one transmission of v →<br />
Covi(v).<br />
2) Case 2: Node v is adjacent to some node u <strong>in</strong> the exist<strong>in</strong>g<br />
Tbcast. Hence, two transmissions of {u → v, v →<br />
Covi(v)} cover all nodes <strong>in</strong> Covi(v).<br />
3) Case 3: Some node x ∈ Covi(v) is also <strong>in</strong> Tbcast. Note<br />
that x is adjacent to v. Similar to Case 2, two transmissions<br />
of {x → v, v → Covi(v)} cover all nodes <strong>in</strong><br />
Covi(v).<br />
4) Case 4: A node x ∈ Covi(v) is adjacent to some node<br />
u <strong>in</strong> Tbcast. In this case, three transmissions of {u →<br />
x, x → v, v → Covi(v)} cover all nodes <strong>in</strong> Covi(v).<br />
The summary of the four aforementioned cases yields this<br />
lemma. <br />
Us<strong>in</strong>g Lemma 1, Theorem 4 gives the approximation ratio of<br />
the CSCA algorithm.<br />
Theorem 4: The approximation ratio of the CSCA algorithm<br />
is 3(ln Δ + 1).<br />
Proof: Let OPT denote the m<strong>in</strong>imum number of transmissions<br />
<strong>in</strong> a broadcast session on G and OPTi denote the<br />
m<strong>in</strong>imum size of Ci for all nodes <strong>in</strong> Ui. Accord<strong>in</strong>g to (1),<br />
we have<br />
OPT <br />
OPTi.<br />
i∈T<br />
Denot<strong>in</strong>g the number of total transmissions of the CSCA<br />
algorithm by M, accord<strong>in</strong>g to Lemma 1, we have<br />
M 3 |{Covi(v)|i ∈ T,v ∈ Ci}| =3 <br />
|Ci|.<br />
Each Ci is greedily chosen; thus<br />
i∈T<br />
|Ci| (ln (max(|Covi(v)|)) + 1)OPTi.<br />
Hence<br />
M 3 <br />
|Ci| 3 <br />
(ln (max (|Covi(v)|)) + 1) OPTi<br />
i∈T<br />
i∈T<br />
3(ln Δ + 1) <br />
OPTi 3(ln Δ + 1)OPT. (2)<br />
i∈T<br />
This f<strong>in</strong>ishes our proof. <br />
Theorem 5 gives the time complexity of the CSCA algorithm.<br />
Theorem 5: The time complexity of the CSCA algorithm<br />
is O(n 3 ).<br />
Proof: The time complexity of the greedy set-cover<strong>in</strong>g<br />
algorithm is O(n 2 ). This algorithm runs |T | times <strong>in</strong> total <strong>in</strong><br />
the CSCA algorithm and has O(n 2 |T |) time complexity. The<br />
backbone construction costs n 3 +1/2 comparisons <strong>in</strong> the worst<br />
case and thus has O(n 3 ) time complexity. Therefore, the total<br />
time complexity is O(n 3 + n 2 |T |). It is obvious that backbone<br />
construction dom<strong>in</strong>ates the time complexity. |T | is known as a<br />
constant. Hence, the time complexity of the algorithm is O(n 3 ).<br />
C. DSCA Algorithm<br />
Follow<strong>in</strong>g the SCA scheme, the DSCA algorithm also consists<br />
of two phases. In phase I of the DSCA, the cover<strong>in</strong>g node<br />
set for each Ui is found with a distributed election process. In<br />
phase II of the DSCA, the backbone connect<strong>in</strong>g all cover<strong>in</strong>g<br />
nodes and the source s is constructed <strong>in</strong> a distributed manner<br />
us<strong>in</strong>g message pass<strong>in</strong>g. These two common distributed algorithms<br />
<strong>in</strong> the two phases provide good results with both l<strong>in</strong>ear<br />
time and message complexity. In DSCA, we assume that all<br />
nodes are <strong>in</strong>itially <strong>in</strong> idle listen<strong>in</strong>g state and turn to duty-cycl<strong>in</strong>g<br />
mode when the trigger z is set from 0 to 1. For convenience of<br />
description, we present some def<strong>in</strong>itions first.<br />
Def<strong>in</strong>ition 4 (i-Dom<strong>in</strong>ator): An i-dom<strong>in</strong>ator is a cover<strong>in</strong>g<br />
node for Ui (i ∈ T ).<br />
Def<strong>in</strong>ition 5 (i-Dom<strong>in</strong>atee): An i-dom<strong>in</strong>atee is a node <strong>in</strong> Ui<br />
covered by some i-dom<strong>in</strong>ator (i ∈ T ).<br />
We use the term ∗-dom<strong>in</strong>ator and ∗-dom<strong>in</strong>atee to represent<br />
any i-dom<strong>in</strong>ator and i-dom<strong>in</strong>atee (i ∈ T ).<br />
1) Phase I—Elect ∗-Dom<strong>in</strong>ators: The distributed election<br />
process aims to f<strong>in</strong>d a cover<strong>in</strong>g node set for each Ui. For<br />
the convenience of distributed implementation, we elect the<br />
i-dom<strong>in</strong>ators from Ui rather than from V <strong>in</strong> the centralized<br />
algorithm. Each node acquires its two-hop neighbor <strong>in</strong>formation<br />
by exchang<strong>in</strong>g the beacon message among its one-hop<br />
neighbors. Initially, all nodes are <strong>in</strong> the white state and are
HONG et al.: MTB IN UNCOORDINATED DUTY-CYCLED WANETs 313<br />
Fig. 5. Connect<strong>in</strong>g ∗-dom<strong>in</strong>ators. Note that, <strong>in</strong> this example, i = j; thus, the<br />
two ∗-dom<strong>in</strong>ators (i-and j-) can be adjacent to each other.<br />
marked blue if they become ∗-dom<strong>in</strong>ators or ∗-dom<strong>in</strong>atees. The<br />
election process is stated as given here.<br />
1) A white node with active time slot i broadcasts the<br />
IamDom<strong>in</strong>ator (ID, i) message conta<strong>in</strong><strong>in</strong>g its ID and i<br />
to declare itself an i-dom<strong>in</strong>ator and is marked blue if it<br />
has the most white neighbor nodes with active time slot i<br />
among all its one-hop white neighbors. (Node IDs are<br />
used to break the tie.)<br />
2) A white node with active time slot i becomes an<br />
i-dom<strong>in</strong>ator and is marked blue if it has neither white<br />
neighbors with active time slot i nor i-dom<strong>in</strong>ators around<br />
(knowledge from IamDom<strong>in</strong>atee messages).<br />
3) A white node with active time slot i becomes an<br />
i-dom<strong>in</strong>atee, is marked blue upon receiv<strong>in</strong>g the<br />
IamDom<strong>in</strong>ator(∗,i) message, and broadcasts the<br />
IamDom<strong>in</strong>atee(ID, i) message.<br />
At the end of this election process, each node is a<br />
∗-dom<strong>in</strong>ator or a ∗-dom<strong>in</strong>atee, and all nodes <strong>in</strong> Ui are covered<br />
by i-dom<strong>in</strong>ators. It is obvious that all i-dom<strong>in</strong>ators form an<br />
IS. However, an i-dom<strong>in</strong>ator may be adjacent to a j-dom<strong>in</strong>ator<br />
iff i = j. All∗-dom<strong>in</strong>ators generated <strong>in</strong> the elect<strong>in</strong>g procedure<br />
have the property that any pair of complementary subsets of<br />
all ∗-dom<strong>in</strong>ators are separated by no more than three hops.<br />
This is because the election process guarantees that no white<br />
node exists when it f<strong>in</strong>ishes and no ∗-dom<strong>in</strong>atee exists with no<br />
∗-dom<strong>in</strong>ators around.<br />
2) Phase II—Connect ∗-Dom<strong>in</strong>ators: Fig. 5 shows the<br />
process of connect<strong>in</strong>g ∗-dom<strong>in</strong>ators. In this phase, a forward<strong>in</strong>g<br />
tree H connect<strong>in</strong>g all ∗-dom<strong>in</strong>ators and the broadcast source s,<br />
which is exactly the broadcast backbone, will be constructed<br />
by exchang<strong>in</strong>g the INV/JOIN messages. Each node ma<strong>in</strong>ta<strong>in</strong>s<br />
a local trigger variable z, which is <strong>in</strong>itialized to 0 and set<br />
to 1 after this node jo<strong>in</strong>s the tree. Each node also ma<strong>in</strong>ta<strong>in</strong>s<br />
asetSLs (<strong>in</strong>itialized to ∅) stor<strong>in</strong>g the send<strong>in</strong>g time slots.<br />
Any two ∗-dom<strong>in</strong>ators are at most three hops away; thus, we<br />
only need to f<strong>in</strong>d some one- and two-hop connectors. The<br />
∗-dom<strong>in</strong>ator connect<strong>in</strong>g procedure uses four types of messages.<br />
Message INV1(i) is used by an i-dom<strong>in</strong>ator to connect to other<br />
∗-dom<strong>in</strong>ators and i-dom<strong>in</strong>atees, or to f<strong>in</strong>d one-hop connectors<br />
for two-hop ∗-dom<strong>in</strong>ators. Message INV2 is used by a<br />
∗-dom<strong>in</strong>atee to connect to two-hop ∗-dom<strong>in</strong>ators or f<strong>in</strong>d twohop<br />
connectors for three-hop ∗-dom<strong>in</strong>ators. Message INV3<br />
is used by a candidate two-hop connector to f<strong>in</strong>d three-hop<br />
∗-dom<strong>in</strong>ators. Message JOIN(i) is the reply for a node with<br />
Algorithm 2. Forward<strong>in</strong>g Tree Construct<strong>in</strong>g<br />
active time slot i to jo<strong>in</strong> H. A∗-dom<strong>in</strong>atee is marked gray<br />
if it is a candidate of a one- or a two-hop connector. Each<br />
∗-dom<strong>in</strong>atee marks itself a connector if it becomes a one- or<br />
a two-hop connector.<br />
The H roots at the source node s. Ifs is an i-dom<strong>in</strong>ator, it<br />
sets z =1and then broadcasts the INV1(i) message to start the<br />
construct<strong>in</strong>g procedure. Otherwise, s sets z =1and broadcasts<br />
the INV2 message to start the construct<strong>in</strong>g procedure. All<br />
other nodes jo<strong>in</strong> H accord<strong>in</strong>g to Algorithm 2. Note that, <strong>in</strong><br />
Algorithm 2, a ∗-dom<strong>in</strong>ator and ∗-dom<strong>in</strong>atee will act as the<br />
∗-dom<strong>in</strong>ator only, rather than both. The property of phase I<br />
that any pair of complementary subsets of all ∗-dom<strong>in</strong>ators<br />
are separated by no more than three hops guarantees that,<br />
whenever there is any ∗-dom<strong>in</strong>ators outside the current H, at<br />
least one would jo<strong>in</strong> H. Eventually, all ∗-dom<strong>in</strong>ators elected<br />
<strong>in</strong> the elect<strong>in</strong>g procedure will jo<strong>in</strong> H. Consequently, all<br />
∗-dom<strong>in</strong>ators and connectors form the broadcast backbone B,<br />
and the pair series (v, SLs(v))(v ∈ B) forms the BS(B).<br />
In the rema<strong>in</strong><strong>in</strong>g part of this section, we will first analyze<br />
the approximation ratio of the DSCA algorithm and, then, the<br />
time and message complexity. Denot<strong>in</strong>g the m<strong>in</strong>imum number<br />
of total transmissions of a broadcast session on G by OPT,we<br />
have the follow<strong>in</strong>g lemma:<br />
Lemma 2: The number of ∗-dom<strong>in</strong>ators elected <strong>in</strong> the elect<strong>in</strong>g<br />
procedure is at most 5OPT.<br />
Proof: Denote all ∗-dom<strong>in</strong>ators elected <strong>in</strong> the elect<strong>in</strong>g<br />
procedure by U ′ .LetH ′ be any spann<strong>in</strong>g tree of the broadcast<br />
backbone <strong>in</strong> the optimal solution. Consider an arbitrary<br />
preorder traversal of H ′ given by v1,v2,...,v |H ′ |. The number<br />
of transmissions of a node vi <strong>in</strong> H ′ is determ<strong>in</strong>ed by SLs(vi).
314 <strong>IEEE</strong> TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 59, NO. 1, JANUARY 2010<br />
Assume that SLs(vi) ={t1,t2,...,t |SLs(vi)|}. It is obvious<br />
that OPT = <br />
′ |SLs(vi)|.<br />
vi∈H<br />
Let U ′ i denote the ∗-dom<strong>in</strong>ators <strong>in</strong> U ′ , which are adjacent<br />
to node vi but none of v1,v2,...,vi−1. Thus, all U ′ i form a<br />
partition of U ′ , and |H ′ |<br />
i=1 |U ′ i | = |U ′ |. Because all i-dom<strong>in</strong>ators<br />
form an IS, node vi can be adjacent to at most five <strong>in</strong>dependent<br />
i-dom<strong>in</strong>ators <strong>in</strong> a UDG [29]. Note that an i-dom<strong>in</strong>ator can be<br />
adjacent to other j-dom<strong>in</strong>ators when i = j. Consequently, one<br />
transmission of node vi at time slot tk covers at most five <strong>in</strong>dependent<br />
tk-dom<strong>in</strong>ators, regardless of vi be<strong>in</strong>g a ∗-dom<strong>in</strong>ator or<br />
a ∗-dom<strong>in</strong>atee. For any two adjacent nodes vi−1 and vi, it is possible<br />
that SLa(vi) ∈ SLs(vi−1), but SLa(vi−1) /∈ SLs(vi).<br />
Hence, at most 5|SLs(vi)|∗-dom<strong>in</strong>ators <strong>in</strong> U ′ can be covered<br />
by node vi us<strong>in</strong>g the transmitt<strong>in</strong>g schedule stored <strong>in</strong> SLs(vi).It<br />
means that |U ′ i | 5|SLs(vi)|. Therefore<br />
|U ′ |H<br />
| =<br />
′ | <br />
|U ′ |H<br />
i| 5<br />
′ | <br />
|SLs(vi)| =5OPT. (3)<br />
i=1<br />
i=1<br />
This f<strong>in</strong>ishes our proof. <br />
The approximation ratio of the DSCA algorithm is described<br />
<strong>in</strong> Theorem 6.<br />
Theorem 6: The approximation ratio of the DSCA algorithm<br />
is a constant of at most 20.<br />
Proof: Denote by U ′ the set of all ∗-dom<strong>in</strong>ators elected<br />
<strong>in</strong> the elect<strong>in</strong>g procedure and by M the number of total transmissions<br />
of the DSCA algorithm. To cover all ∗-dom<strong>in</strong>atees,<br />
each ∗-dom<strong>in</strong>ator needs exactly one transmission and leads to<br />
a summation of |U ′ |. By the property mentioned of DSCA that<br />
any pair of complementary subsets of all ∗-dom<strong>in</strong>ators are separated<br />
by no more than three hops, at most three transmissions<br />
are need to f<strong>in</strong>d and reach a ∗-dom<strong>in</strong>ator outside the exist<strong>in</strong>g H.<br />
If the source node s is a ∗-dom<strong>in</strong>ator, the number of transmissions<br />
for connect<strong>in</strong>g all ∗-dom<strong>in</strong>ators is at most 3(|U ′ |−1).<br />
Accord<strong>in</strong>g to Lemma 2, we have<br />
M 3(|U ′ |−1) + |U ′ |<br />
=4|U ′ |−3 20OPT − 3. (4)<br />
If the source node s is not a ∗-dom<strong>in</strong>ator, the number of<br />
transmissions for connect<strong>in</strong>g all ∗-dom<strong>in</strong>ators is at most 1+<br />
3(|U ′ |−1). Hence<br />
M 1+3(|U ′ |−1) + |U ′ |<br />
=4|U ′ |−2 20OPT − 2. (5)<br />
The theorem holds <strong>in</strong> either case. <br />
Theorem 7 gives the message and the time complexities of<br />
the DSCA algorithm.<br />
Theorem 7: Both the time and the message complexities of<br />
the DSCA algorithm are O(n) overall.<br />
Proof: In the ∗-dom<strong>in</strong>ator elect<strong>in</strong>g procedure, each node<br />
sends constant messages and takes l<strong>in</strong>ear time. In the forward<strong>in</strong>g<br />
tree-construct<strong>in</strong>g procedure, each node also sends constant<br />
messages. The backbone construct<strong>in</strong>g procedure takes at most<br />
l<strong>in</strong>ear time. Therefore, both the total message complexity and<br />
the time complexity of the DSCA algorithm are O(n). <br />
V. P ERFORMANCE EVALUATION<br />
In this section, we comparatively evaluate the performance<br />
of the modified tree-based, modified MCDS-based, and SCA<br />
schemes. We first give theoretical comparison results and the<br />
two factors affect<strong>in</strong>g the performance of SCA-based algorithms.<br />
Then, the results of the simulations, which validate the<br />
theoretical results, are discussed.<br />
A. Theoretical Comparisons<br />
Various algorithms can be derived based on different implementations<br />
of the modified tree-based, modified MCDSbased,<br />
and proposed SCA-scheme. We can theoretically obta<strong>in</strong><br />
comparative results of all these algorithms accord<strong>in</strong>g to the<br />
comparisons of their schemes.<br />
We compare the SCA scheme to the modified tree-based<br />
scheme first. The number of total transmissions of algorithms<br />
based on SCA schemes (CSCA and DSCA), which is denoted<br />
by MS, depends on the sum of the size of each cover<strong>in</strong>g node<br />
set Ci of Ui and the number of connectors, as implied <strong>in</strong><br />
Section IV-A. Because we can always f<strong>in</strong>d the set of connectors<br />
with the size constantly proportional to |Ci|, MS can be<br />
expressed as λ |Ci|, where λ is a constant, and λ 1.<br />
(The CSCA and the DSCA provide λ’s of at most 3 and 4,<br />
respectively.)<br />
As shown <strong>in</strong> Section III-A, the number of total transmissions<br />
of algorithms derived from the modified tree-based scheme MT<br />
is n − 1. While compar<strong>in</strong>g MS to MT , we have the follow<strong>in</strong>g<br />
result:<br />
Theorem 8:<br />
λ|T ′ | MS<br />
<br />
n − 1 MT<br />
λn<br />
n − 1<br />
where T ′ = <br />
v∈V SLa(v)(T ′ ⊆ T ).<br />
Proof: The worst case for SCA-based algorithms is that<br />
the size of each cover<strong>in</strong>g node set Ci is equal to |Ui|; <strong>in</strong><br />
this case<br />
MS<br />
MT<br />
= λ <br />
i∈T |Ci|<br />
<br />
n − 1<br />
<br />
λ i∈T |Ui|<br />
=<br />
n − 1<br />
λn<br />
n − 1 .<br />
The best case for SCA-based algorithms is that all nodes <strong>in</strong><br />
Ui can be covered by one transmission at time slot i, <strong>in</strong> which<br />
|Ci| =1. In this case<br />
MS<br />
MT<br />
= λ <br />
i∈T |Ci|<br />
<br />
n − 1<br />
<br />
λ i∈T ′ |Ci|<br />
=<br />
n − 1<br />
λ|T ′ |<br />
n − 1 .<br />
<br />
Theorem 8 establishes a lower and an upper bound of the<br />
performance ga<strong>in</strong> of the SCA-based scheme to the modified<br />
tree-based scheme. Because λn/(n − 1) ∈ Θ(1), we can <strong>in</strong>fer<br />
that the performance of the SCA-based algorithms is with<strong>in</strong> a<br />
constant factor of the modified tree-based algorithms, even <strong>in</strong><br />
the worst case.<br />
Next, we would like to compare the SCA scheme with the<br />
modified MCDS-based scheme. For simplicity of analysis, we<br />
assume that the SCA scheme f<strong>in</strong>ds the m<strong>in</strong>imum cover<strong>in</strong>g node<br />
set for each Ui and that the MCDS-based scheme achieves the<br />
(6)
HONG et al.: MTB IN UNCOORDINATED DUTY-CYCLED WANETs 315<br />
optimal MCDS dur<strong>in</strong>g the comparison. Denot<strong>in</strong>g the number<br />
of total transmissions of the modified MCDS-based scheme by<br />
MM, with the aforementioned assumption, we have<br />
Theorem 9:<br />
1 MS<br />
λ. (7)<br />
m<strong>in</strong> (Δ, |T |) MM<br />
Proof: Given a duty-cycled WANET and the correspond<strong>in</strong>g<br />
MCDS, as described <strong>in</strong> the proof of Theorem 3, a lower<br />
bound of the number of total transmissions is #MCDS. Thus,<br />
we have MS #MCDS. Accord<strong>in</strong>g to Theorem 3, we also<br />
have MM m<strong>in</strong>(Δ, |T |)#MCDS. Hence<br />
MS<br />
MM<br />
<br />
#MCDS<br />
m<strong>in</strong> (Δ, |T |)#MCDS <br />
1<br />
m<strong>in</strong> (Δ, |T |) .<br />
Then, we denote the node set <strong>in</strong> the modified MCDS-based<br />
scheme, which transmits at time slot i,byWi and the m<strong>in</strong>imum<br />
cover<strong>in</strong>g node set for Ui <strong>in</strong> the SCA scheme by C ′ i . It is <strong>in</strong>tuitive<br />
that |C ′ i | |Wi|; otherwise, Wi would be a smaller cover<strong>in</strong>g<br />
node set for Ui, which contradicts the assumption that C ′ i is the<br />
m<strong>in</strong>imum one. Therefore, we have<br />
MS<br />
MM<br />
= λ <br />
i∈T |C′ i |<br />
<br />
i∈T<br />
|Wi| λ.<br />
<br />
Theorem 9 establishes a lower and an upper bound of the<br />
performance ga<strong>in</strong> of the SCA scheme to the MCDS-based<br />
scheme. However, both the m<strong>in</strong>imum set cover problem <strong>in</strong> the<br />
SCA scheme and the MCDS problem <strong>in</strong> the modified MCDSbased<br />
scheme are NP-hard, and only suboptimal solutions are<br />
available. Hence, while compar<strong>in</strong>g the algorithms derived from<br />
the two schemes, we obta<strong>in</strong> the upper bound on the performance<br />
ga<strong>in</strong> of αλ accord<strong>in</strong>gly, where α is the approximation ratio of<br />
the size of the m<strong>in</strong>imum cover<strong>in</strong>g node set.<br />
There are two important factors affect<strong>in</strong>g the performance of<br />
the SCA-based algorithms: One is the network topology, and<br />
the other is the length of the schedul<strong>in</strong>g period |T |.<br />
The network topology factors <strong>in</strong>clude the radio radius, node<br />
position, deployed manner, etc. One of the worst topologies for<br />
SCA-based algorithms is the case that all nodes <strong>in</strong> Ui form an<br />
IS of radius 2r, where r is radius of the radio range. In this case,<br />
we cannot f<strong>in</strong>d a node <strong>in</strong> V cover<strong>in</strong>g more than one node <strong>in</strong> Ui;<br />
thus, |Ci| = |Ui|, which means that no transmitt<strong>in</strong>g redundance<br />
can be elim<strong>in</strong>ated us<strong>in</strong>g the SCA scheme. The best topology<br />
is that all nodes <strong>in</strong> Ui can be covered by one node and that<br />
all these cover<strong>in</strong>g nodes form a connected subgraph, <strong>in</strong> which<br />
the transmitt<strong>in</strong>g redundance can be elim<strong>in</strong>ated to the greatest<br />
extent by SCA-based algorithms. An example of the best case<br />
is shown <strong>in</strong> Fig. 6.<br />
The value of |T |, which is the length of the schedul<strong>in</strong>g period<br />
of a duty-cycled WANET, affects the size of Ui and, thus,<br />
the performance of SCA-based algorithms. While |T |→∞,<br />
which is the case of extremely low duty cycle, the probability<br />
of two nodes hav<strong>in</strong>g the same active time slot becomes small<br />
with random time-slot choice, which means that |Ui| →1;<br />
thus, |Ci| →1. This becomes the worst case of SCA-based<br />
algorithms. While |T | becomes smaller, more nodes will share<br />
Fig. 6. Example of the best case for SCA-based algorithms. In this case, each<br />
vi+1 ∈ Ui, and the number of total transmissions is |Ci| = |T |.<br />
the same active time slot with higher probability, which means<br />
that more transmitt<strong>in</strong>g redundance can be elim<strong>in</strong>ated by SCAbased<br />
algorithms; thus, the performance will be better.<br />
B. Simulations<br />
We conduct simulations to compare the performances<br />
of algorithms based on the modified tree-based, modified<br />
MCDS-based, and SCA-based schemes, respectively, and to<br />
verify the conclusions drawn <strong>in</strong> the theoretical analysis. The<br />
simulations are conducted with PARSEC, which is a C-based<br />
discrete-event simulation language [37]. In the simulations,<br />
the network is randomly deployed <strong>in</strong> a 200 m × 200 m<br />
dimension area. To ma<strong>in</strong>ta<strong>in</strong> reasonable network connectivity,<br />
the radio radius of each node is set to 35 m, result<strong>in</strong>g <strong>in</strong> at<br />
least 0.5 nodes/100 m 2 and a node degree of at least 19 <strong>in</strong> the<br />
follow<strong>in</strong>g experiments. Each node randomly chooses an active<br />
time slot from T . Four algorithms, i.e., the modified tree-based<br />
approximation (TA) algorithm, the modified MCDS-based approximation<br />
(MA) algorithm, and both the CSCA and DSCA,<br />
are implemented. In the MA algorithm, we f<strong>in</strong>d the MCDS<br />
accord<strong>in</strong>g the Modified Greedy Algorithm <strong>in</strong> [28], which has<br />
a good logarithmic approximation ratio of 2(1 + H(Δ)). All<br />
results are the average of ten runs. In each run, the broadcast<br />
source node is chosen randomly.<br />
We compare the number of total transmissions of the four algorithms<br />
first. The network size scales from 200 to 1000 nodes<br />
with an <strong>in</strong>crement of 200, and the value of |T | is set to 20, 40,<br />
60, and 80, respectively. Accord<strong>in</strong>g to Fig. 7(a)–(d), both the<br />
CSCA and DSCA outperform the TA and MA algorithms <strong>in</strong><br />
the four general network configurations. Compared with that of<br />
the TA algorithm, the number of transmissions is reduced by<br />
50% and 70% us<strong>in</strong>g CSCA and DSCA, respectively, as the network<br />
size scales over 800 nodes when the value of |T | is small<br />
[see Fig. 7(a)]. We notice that this disparity becomes larger<br />
as the network scales up. An explanation is that, when other<br />
factors rema<strong>in</strong> unchanged, more nodes will enlarge the size<br />
of Ui and Disk(v), which enables the SCA-based algorithms<br />
to elim<strong>in</strong>ate more redundant transmissions. In the simulations,<br />
we f<strong>in</strong>d that the size of the MCDS found <strong>in</strong> the MA algorithm<br />
changes little s<strong>in</strong>ce both the deploy<strong>in</strong>g area and the radio range<br />
are fixed. However, as the network scales up, the average<br />
number of nodes dom<strong>in</strong>ated by each dom<strong>in</strong>at<strong>in</strong>g node becomes<br />
larger. In particular, <strong>in</strong> the cases with larger |T |, the sets of<br />
active time slots of neighbors for the dom<strong>in</strong>at<strong>in</strong>g nodes are<br />
consequently large. Consequently, the MA algorithm performs
316 <strong>IEEE</strong> TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 59, NO. 1, JANUARY 2010<br />
Fig. 7. Performance comparison of the four algorithms under cases with different values of |T |. (a)|T | =20.(b)|T | =40.(c)|T | =60.(d)|T | =80.<br />
Fig. 8. Effect of the value of |T | on the performance. (a) Network size: 250 nodes. (b) Network size: 500 nodes. (c) Network size: 750 nodes. (d) Network size:<br />
1000 nodes.<br />
poorly <strong>in</strong> these cases [see Fig. 7(c) and (d)], because each<br />
dom<strong>in</strong>at<strong>in</strong>g node had to transmit accord<strong>in</strong>g to the active time<br />
slots of its neighbors, which leads to massive redundancy.<br />
We then evaluate the effect of the value |T | on the performance<br />
of the four algorithms. In this simulation, the network<br />
size is set to 250, 500, 750, and 1000 nodes, respectively, and<br />
the |T | scales from 20 to 200 time slots with an <strong>in</strong>crement<br />
of 20. From Fig. 8, we can see that the performance of the<br />
MA, CSCA, and DSCA algorithms degrades as |T | becomes<br />
larger, whereas the TA algorithm rema<strong>in</strong>s unchanged, because<br />
it is only affected by the size of the network. This result<br />
matches our analysis that extremely small |T | will lead to the<br />
worst case for SCA-based algorithms. However, the number<br />
of transmissions of the CSCA and DSCA algorithms never<br />
exceeds the TA algorithm <strong>in</strong> the simulations. It is ma<strong>in</strong>ly<br />
because the implementation of both of the two algorithms<br />
generates tree-like structures <strong>in</strong> the network; thus, the number<br />
of transmissions will not be larger than n − 1. This simulation<br />
shows aga<strong>in</strong> that the performance of the MA algorithm<br />
degrades fast as the value of |T | <strong>in</strong>creases. When |T | reaches<br />
200, the number of transmissions of the MA algorithm is even<br />
double that of the TA and DSCA algorithm [see Fig. 8(b)]<br />
and nearly triple that of the CSCA algorithm [see Fig. 8(c)<br />
and (d)]. We also notice that the MA algorithm performs<br />
better <strong>in</strong> sett<strong>in</strong>gs with a large-scale network and low |T | [see<br />
Fig. 8(b)–(d)]. The reason beh<strong>in</strong>d this is that, while |T |→1, it<br />
is more like the conventional WANET, where the MCDS-based<br />
approaches achieve the optimal solution.<br />
Simulation results (see Figs. 7 and 8) also show that the<br />
CSCA algorithm outperforms the DSCA algorithm. The reason<br />
resides <strong>in</strong> the difference of the dom<strong>in</strong>at<strong>in</strong>g-node election methods.<br />
First, <strong>in</strong> CSCA, we benefit from the global <strong>in</strong>formation,<br />
whereas, <strong>in</strong> DSCA, we can only depend on the local <strong>in</strong>formation.<br />
Second, <strong>in</strong> CSCA, we f<strong>in</strong>d the m<strong>in</strong>imum cover<strong>in</strong>g node set<br />
for each Ui from V , whereas <strong>in</strong> DSCA, we only make the search<br />
<strong>in</strong> Ui for practical implementation. Consequently, the size of the<br />
cover<strong>in</strong>g node set for each Ui <strong>in</strong> CSCA is always larger than that<br />
<strong>in</strong> DSCA, which leads to the performance disparity.<br />
In duty-cycled WANETs, m<strong>in</strong>imiz<strong>in</strong>g the number of broadcast<br />
transmissions may lead to <strong>in</strong>tolerable broadcast latency<br />
[33]. Thus, we also conduct experiments to exam<strong>in</strong>e the broadcast<br />
latency of our algorithms. The optimal broadcast latency<br />
(OPT) serves as the compared basel<strong>in</strong>e. We observe both the<br />
exact broadcast latency and the latency dilation, which is<br />
def<strong>in</strong>ed as the ratio of the exact latency to the optimal value.<br />
We first set |T | to 100 and observe the effect of network size.<br />
As the network size <strong>in</strong>creases, the exact broadcast latency of<br />
CSCA and DSCA <strong>in</strong>creases quite slowly [see Fig. 9(a)]. (Note<br />
that the y-axis is <strong>in</strong> the log scale.) It is partially because the<br />
exact latency of our algorithms is affected by the number of<br />
set-cover<strong>in</strong>g nodes <strong>in</strong> the broadcast backbone, which depends<br />
more on |T | than on the network size. S<strong>in</strong>ce the optimal latency<br />
decreases as the network size <strong>in</strong>creases, the latency dilations of<br />
our algorithms <strong>in</strong>crease l<strong>in</strong>early [see Fig. 9(b)]. We then set the<br />
network size to 500 nodes and observe the effect of |T |. Aswe<br />
regard, the exact latency of both the optimal solution and our<br />
algorithms <strong>in</strong>crease with |T | [see Fig. 9(c)]. However, as shown<br />
<strong>in</strong> Fig. 9(d), the latency dilations of our algorithms quite slowly<br />
<strong>in</strong>crease. In particular, the latency dilation of CSCA is bounded<br />
by a constant of eight on average. The m<strong>in</strong>or changes of the<br />
latency dilations <strong>in</strong>dicate that, as |T | <strong>in</strong>creases, the broadcast<br />
latency of our algorithms rema<strong>in</strong>s with<strong>in</strong> a small factor of the<br />
optimal value.<br />
VI. DISCUSSION<br />
In this section, we would like to briefly discuss some related<br />
issues when solv<strong>in</strong>g the MTB-UD problem: the transmitt<strong>in</strong>g<br />
collision, the broadcast latency, and the balance of energy<br />
consumption.
HONG et al.: MTB IN UNCOORDINATED DUTY-CYCLED WANETs 317<br />
Fig. 9. Performance of broadcast latency. (a) |T | = 100. (b)|T | = 100. (c) Network size: 500 nodes. (d) Network size: 500 nodes.<br />
Transmitt<strong>in</strong>g collisions exist <strong>in</strong> almost all wireless communication<br />
environments. In duty-cycled WANETs, collisions<br />
will happen, although with a low probability, e.g., two nodes<br />
simultaneously transmit to the same node at the same time<br />
slot. Collisions usually cause retransmission and <strong>in</strong>crease the<br />
broadcast latency. How to elim<strong>in</strong>ate collisions and m<strong>in</strong>imize the<br />
broadcast latency is another challeng<strong>in</strong>g problem (actually, an<br />
NP-hard problem). In this paper, we focus on m<strong>in</strong>imiz<strong>in</strong>g the<br />
number of transmissions and leave the collision-avoid<strong>in</strong>g job to<br />
the underly<strong>in</strong>g MAC protocol [1].<br />
The latency of a broadcast process is also important. M<strong>in</strong>imiz<strong>in</strong>g<br />
the number of transmissions may lead to <strong>in</strong>tolerable<br />
broadcast latency [33]. The broadcast latency <strong>in</strong> duty-cycled<br />
WANETs is affected by both the active time slot of each<br />
node and the collision <strong>in</strong> the network. It is such a complex<br />
problem that we have decided to leave it to our future work.<br />
Nevertheless, as shown by the experiment results, the broadcast<br />
latency of our algorithm <strong>in</strong>creases quite slowly as the network<br />
size <strong>in</strong>creases and rema<strong>in</strong>s with<strong>in</strong> a small factor of the optimal<br />
values as the schedul<strong>in</strong>g period |T | <strong>in</strong>creases.<br />
The unbalanced energy consumption is a common problem<br />
of all backbone-based broadcast schemes. In our algorithms,<br />
broadcast messages are conveyed upon the constructed broadcast<br />
backbones. Hence, the energy on these backbone nodes<br />
will deplete faster than that on other nodes, caus<strong>in</strong>g the unbalanced<br />
energy consumption <strong>in</strong> the network. Many solutions<br />
have been proposed to address this problem and extend the<br />
network lifetime, e.g., change the backbone <strong>in</strong> rotation. In<br />
fact, as a different topic, the unbalanced energy consumption<br />
problem has well been studied; thus, we keep our focus on the<br />
MTB-UD problem.<br />
VII. CONCLUSION<br />
In this paper, we have studied the MTB problem <strong>in</strong> uncoord<strong>in</strong>ated<br />
duty-cycled WANETs. We have first formulated this<br />
problem, proven its NP-hardness, and presented two schemes<br />
(i.e., the modified tree-based and the modified MCDS-based<br />
scheme) based on exist<strong>in</strong>g approaches for the conventional<br />
MTB problem. Without explor<strong>in</strong>g the characteristics of dutycycled<br />
WANETs, both of the two schemes have a l<strong>in</strong>ear approximation<br />
ratio of O(n) and thus cannot guarantee to f<strong>in</strong>d<br />
solutions with a small number of transmissions. Then, we<br />
have proposed a novel SCA scheme, together with a centralized<br />
algorithm (CSCA) and a distributed algorithm (DSCA).<br />
The CSCA algorithm has a logarithmic approximation ratio<br />
of 3(ln Δ + 1) and a time complexity of O(n3 ).TheDSCA<br />
algorithm, on the other hand, has a constant approximation<br />
ratio of at most 20 and O(n) time complexity and message<br />
complexity. We have evaluated the performance of the proposed<br />
algorithms, theoretically and via simulations, to demonstrate<br />
their efficiency. Experiment results have shown that the CSCA<br />
algorithm outperforms the modified tree-based and modified<br />
MCDS-based algorithms by up to 70% and 60%, respectively,<br />
and the DSCA algorithm outperforms both the modified treebased<br />
and modified MCDS-based algorithms by up to 50%.<br />
We have also discussed some related issues of the MTB-UD<br />
problem, e.g., the transmitt<strong>in</strong>g collision, the broadcast latency,<br />
and the balance of energy consumption, which will be our<br />
future research.<br />
REFERENCES<br />
[1] W. Ye, J. Heidemann, and D. Estr<strong>in</strong>, “An energy-efficient MAC protocol<br />
for wireless sensor networks,” <strong>in</strong> Proc. INFOCOM, 2002, pp. 1567–1576.<br />
[2] T. van Dam and K. Langendoen, “An adaptive energy-efficient<br />
MAC protocol for wireless sensor networks,” <strong>in</strong> Proc. SenSys, 2003,<br />
pp. 171–180.<br />
[3] R. Zheng and R. Kravets, “On-demand power management for<br />
ad hoc networks,” <strong>in</strong> Proc. INFOCOM, Mar. 30–Apr. 3, 2003, vol. 1,<br />
pp. 481–491.<br />
[4] R. Zheng, J. C. Hou, and L. Sha, “Asynchronous wakeup for ad hoc<br />
networks,” <strong>in</strong> Proc. MobiHoc, 2003, pp. 35–45.<br />
[5] C. fan Hs<strong>in</strong> and M. Liu, “Network coverage us<strong>in</strong>g low duty-cycled sensors:<br />
Random and coord<strong>in</strong>ated sleep algorithms,” <strong>in</strong> Proc. IPSN, 2004,<br />
pp. 433–442.<br />
[6] C. Gui and P. Mohapatra, “Power conservation and quality of surveillance<br />
<strong>in</strong> target track<strong>in</strong>g sensor networks,” <strong>in</strong> Proc. MobiCom, 2004,<br />
pp. 129–143.<br />
[7] O. Dousse, P. Mannersalo, and P. Thiran, “Latency of wireless sensor networks<br />
with uncoord<strong>in</strong>ated power sav<strong>in</strong>g mechanisms,” <strong>in</strong> Proc. MobiHoc,<br />
2004, pp. 109–120.<br />
[8] C. Hua and T.-S. P. Yum, “Asynchronous random sleep<strong>in</strong>g for sensor<br />
networks,” ACM Trans. Sens. Netw., vol. 3, no. 3, p. 15, Aug. 2007.<br />
[9] I. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, “A survey<br />
on sensor networks,” <strong>IEEE</strong> Commun. Mag., vol. 40, no. 8, pp. 102–114,<br />
Aug. 2002.<br />
[10] A. Ma<strong>in</strong>war<strong>in</strong>g, D. Culler, J. Polastre, R. Szewczyk, and J. Anderson,<br />
“Wireless sensor networks for habitat monitor<strong>in</strong>g,” <strong>in</strong> Proc. WSNA, 2002,<br />
pp. 88–97.<br />
[11] N. Xu, S. Rangwala, K. K. Ch<strong>in</strong>talapudi, D. Ganesan, A. Broad,<br />
R. Gov<strong>in</strong>dan, and D. Estr<strong>in</strong>, “A wireless sensor network for structural<br />
monitor<strong>in</strong>g,” <strong>in</strong> Proc. SenSys, 2004, pp. 13–24.<br />
[12] S. Y. Ni, Y. C. Tseng, Y. S. Chen, and J. P. Sheu, “The broadcast<br />
storm problem <strong>in</strong> a mobile ad hoc network,” <strong>in</strong> Proc. MobiCom, 1999,<br />
pp. 151–162.<br />
[13] I. Chlamtac and S. Kutten, “Tree-based broadcast<strong>in</strong>g <strong>in</strong> multihop radio<br />
networks,” <strong>IEEE</strong> Trans. Comput., vol. C-36, no. 10, pp. 1209–1223,<br />
Oct. 1987.<br />
[14] W. Lou and J. Wu, “On reduc<strong>in</strong>g broadcast redundancy <strong>in</strong> ad hoc wireless<br />
networks,” <strong>IEEE</strong> Trans. Mobile Comput., vol. 1, no. 2, pp. 111–123,<br />
Apr.–Jun. 2002.<br />
[15] W. Lou and J. Wu, “A cluster-based backbone <strong>in</strong>frastructure for broadcast<strong>in</strong>g<br />
<strong>in</strong> MANETs,” <strong>in</strong> Proc. IPDPS, 2003, p. 221.1.
318 <strong>IEEE</strong> TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 59, NO. 1, JANUARY 2010<br />
[16] B. Das and V. Bharghavan, “Rout<strong>in</strong>g <strong>in</strong> ad-hoc networks us<strong>in</strong>g m<strong>in</strong>imum<br />
connected dom<strong>in</strong>at<strong>in</strong>g sets,” <strong>in</strong> Proc. ICC, 1997, pp. 376–380.<br />
[17] J. Wu and H. Li, “On calculat<strong>in</strong>g connected dom<strong>in</strong>at<strong>in</strong>g set for efficient<br />
rout<strong>in</strong>g <strong>in</strong> ad hoc wireless networks,” <strong>in</strong> Proc. DIALM, 1999, pp. 7–14.<br />
[18] J. Wu, “An enhanced approach to determ<strong>in</strong>e a small forward node set<br />
based on multipo<strong>in</strong>t relays,” <strong>in</strong> Proc. VTC, 2003, pp. 2774–2777.<br />
[19] J. Wu and W. Lou, “Forward-node-set-based broadcast <strong>in</strong> clustered mobile<br />
ad hoc networks,” Wirel. Commun. Mob. Comput., vol. 3, no. 2, pp. 155–<br />
173, 2003.<br />
[20] J. Wu, W. Lou, and F. Dai, “Extended multipo<strong>in</strong>t relays to determ<strong>in</strong>e<br />
connected dom<strong>in</strong>at<strong>in</strong>g sets <strong>in</strong> MANETs,” <strong>IEEE</strong> Trans. Comput., vol. 55,<br />
no. 3, pp. 334–347, Mar. 2006.<br />
[21] M. R. Garey and D. S. Johnson, Computers and Intractability: A Guide to<br />
the Theory of NP-Completeness. New York: Freeman, 1979.<br />
[22] B. N. Clark, C. J. Colbourn, and D. S. Johnson, “Unit disk graphs,”<br />
Discrete Math., vol. 86, no. 1–3, pp. 165–177, Dec. 1990.<br />
[23] G. Lu, N. Sadagopan, B. Krishnamachari, and A. Goel, “Delay efficient<br />
sleep schedul<strong>in</strong>g <strong>in</strong> wireless sensor networks,” <strong>in</strong> Proc. INFOCOM,<br />
Mar. 2005, vol. 4, pp. 2470–2481.<br />
[24] Q. Cao, T. Abdelzaher, T. He, and J. Stankovic, “Towards optimal sleep<br />
schedul<strong>in</strong>g <strong>in</strong> sensor networks for rare-event detection,” <strong>in</strong> Proc. IPSN,<br />
2005, pp. 20–27.<br />
[25] A. Keshavarzian, H. Lee, and L. Venkatraman, “Wakeup schedul<strong>in</strong>g <strong>in</strong><br />
wireless sensor networks,” <strong>in</strong> Proc. MobiHoc, 2006, pp. 322–333.<br />
[26] Y. Gu and T. He, “Data forward<strong>in</strong>g <strong>in</strong> extremely low duty-cycle sensor<br />
networks with unreliable communication l<strong>in</strong>ks,” <strong>in</strong> Proc. SenSys, 2007,<br />
pp. 321–334.<br />
[27] C. Adjih, P. Jacquet, and L. Viennot, “Comput<strong>in</strong>g connected dom<strong>in</strong>ated<br />
sets with multipo<strong>in</strong>t relays,” Ad Hoc Sens. Wireless Netw., vol. 1, no. 1/2,<br />
pp. 27–39, Jan. 2005.<br />
[28] S. Guha and S. Khuller, “Approximation algorithms for connected dom<strong>in</strong>at<strong>in</strong>g<br />
sets,” Algorithmica, vol. 20, no. 4, pp. 374–387, 1998.<br />
[29] P.-J. Wan, K. M. Alzoubi, and O. Frieder, “Distributed construction of<br />
connected dom<strong>in</strong>at<strong>in</strong>g set <strong>in</strong> wireless ad hoc networks,” Mob. Netw. Appl.,<br />
vol. 9, no. 2, pp. 141–149, Apr. 2004.<br />
[30] Y. Li, M. T. Thai, F. Wang, C.-W. Yi, P.-J. Wan, and D.-Z. Du, “On greedy<br />
construction of connected dom<strong>in</strong>at<strong>in</strong>g sets <strong>in</strong> wireless networks: Research<br />
articles,” Wirel. Commun. Mob. Comput., vol. 5, no. 8, pp. 927–932,<br />
Dec. 2005.<br />
[31] P.-J. Wan, L. Wang, and F. Yao, “Two-phased approximation algorithms<br />
for m<strong>in</strong>imum CDS <strong>in</strong> wireless ad hoc networks,” <strong>in</strong> Proc. ICDCS, 2008,<br />
pp. 337–344.<br />
[32] M. J. Miller, C. Sengul, and I. Gupta, “Explor<strong>in</strong>g the energy-latency tradeoff<br />
for broadcasts <strong>in</strong> energy-sav<strong>in</strong>g sensor networks,” <strong>in</strong> Proc. ICDCS,<br />
2005, pp. 17–26.<br />
[33] F. Wang and J. Liu, “Duty-cycle-aware broadcast <strong>in</strong> wireless sensor networks,”<br />
<strong>in</strong> Proc. INFOCOM, 2009, pp. 468–476.<br />
[34] M. Maróti, B. Kusy, G. Simon, and A. Lédeczi, “The flood<strong>in</strong>g time<br />
synchronization protocol,” <strong>in</strong> Proc. SenSys, 2004, pp. 39–49.<br />
[35] A. Jütner and A. Magi, “Tree based broadcast <strong>in</strong> ad hoc networks,”<br />
Mob. Netw. Appl., vol. 10, no. 5, pp. 753–762, Oct. 2005.<br />
[36] V. Chvatal, “A greedy heuristic for the set-cover<strong>in</strong>g problem,” Math. Oper.<br />
Res., vol. 4, no. 3, pp. 233–235, 1979.<br />
[37] R. Bagrodia, R. Meyer, M. Takai, Y. an Chen, X. Zeng, J. Mart<strong>in</strong>, and<br />
H. Y. Song, “Parsec: A parallel simulation environment for complex<br />
systems,” Computer, vol. 31, no. 10, pp. 77–85, Oct. 1998.<br />
Jue Hong received the B.S. degree <strong>in</strong> computer<br />
science from Nanj<strong>in</strong>g University, Nanj<strong>in</strong>g, Ch<strong>in</strong>a, <strong>in</strong><br />
2005, where he is currently work<strong>in</strong>g toward the Ph.D.<br />
degree with the Department of Computer Science<br />
and Technology.<br />
His current research <strong>in</strong>terests <strong>in</strong>clude wireless ad<br />
hoc and sensor networks, pervasive comput<strong>in</strong>g, and<br />
distributed comput<strong>in</strong>g.<br />
Jiannong Cao (M’93–SM’04) received the B.Sc.<br />
degree from Nanj<strong>in</strong>g University, Nanj<strong>in</strong>g, Ch<strong>in</strong>a,<br />
<strong>in</strong> 1982 and the M.Sc. and Ph.D. degrees from<br />
Wash<strong>in</strong>gton State University, Pullman, <strong>in</strong> 1986 and<br />
1990, respectively, all <strong>in</strong> computer science.<br />
He is currently a Professor with the Department<br />
of Comput<strong>in</strong>g, Hong Kong Polytechnic University<br />
(PolyU), Kowloon, Hong Kong. Before jo<strong>in</strong><strong>in</strong>g<br />
PolyU <strong>in</strong> 1997, he was with the faculty of computer<br />
science, James Cook University, Townsville,<br />
Australia; the University of Adelaide, Adelaide,<br />
Australia; and the City University of Hong Kong, Kowloon. He has served as an<br />
Associate Editor and a member of the editorial boards of several <strong>in</strong>ternational<br />
journals, as well as Chair and member of organiz<strong>in</strong>g program committees<br />
for many <strong>in</strong>ternational conferences. His research <strong>in</strong>terests <strong>in</strong>clude mobile and<br />
pervasive comput<strong>in</strong>g, wireless network<strong>in</strong>g, parallel and distributed comput<strong>in</strong>g,<br />
fault tolerance, and distributed software architecture and programm<strong>in</strong>g.<br />
Wenzhong Li (S’05–M’08) received the B.S. and<br />
Ph.D. degrees from Nanj<strong>in</strong>g University, Nanj<strong>in</strong>g,<br />
Ch<strong>in</strong>a, <strong>in</strong> 2002 and 2007, respectively, both <strong>in</strong> computer<br />
science.<br />
In 2007, he jo<strong>in</strong>ed Nanj<strong>in</strong>g University as a<br />
Lecturer. His current research <strong>in</strong>terests <strong>in</strong>clude<br />
wireless networks, pervasive comput<strong>in</strong>g, person-toperson<br />
comput<strong>in</strong>g, and mobile data management.<br />
Sanglu Lu (M’04) received the B.S., M.S., and<br />
Ph.D. degrees from Nanj<strong>in</strong>g University, Nanj<strong>in</strong>g,<br />
Ch<strong>in</strong>a, <strong>in</strong> 1992, 1995, and 1997, respectively, all <strong>in</strong><br />
computer science.<br />
She is currently a Professor with the Department<br />
of Computer Science and Technology and the<br />
State Key Laboratory for Novel Software Technology,<br />
Nanj<strong>in</strong>g University. Her research <strong>in</strong>terests <strong>in</strong>clude<br />
distributed comput<strong>in</strong>g, pervasive comput<strong>in</strong>g,<br />
and wireless networks.<br />
Daoxu Chen (M’04) received the B.S. degree <strong>in</strong><br />
computer science from Nanj<strong>in</strong>g University, Nanj<strong>in</strong>g,<br />
Ch<strong>in</strong>a, <strong>in</strong> 1982.<br />
He was a Visit<strong>in</strong>g Researcher with Purdue University,<br />
West Lafayette, IN, and the City University of<br />
Hong Kong, Kowloon, Hong Kong. He is currently a<br />
Professor with the Department of Computer Science<br />
and Technology, Nanj<strong>in</strong>g University, Nanj<strong>in</strong>g, Ch<strong>in</strong>a.<br />
His research <strong>in</strong>terests <strong>in</strong>clude distributed comput<strong>in</strong>g,<br />
parallel process<strong>in</strong>g, and computer networks.<br />
Prof. Chen is a member of the Association<br />
for Comput<strong>in</strong>g Mach<strong>in</strong>ery and a Senior Member of the Ch<strong>in</strong>a Computer<br />
Federation.