Swarm Navigation in a Complex Environment - World Academy of ...
Swarm Navigation in a Complex Environment - World Academy of ...
Swarm Navigation in a Complex Environment - World Academy of ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Abstract—This paper proposes a solution to the motion plann<strong>in</strong>g<br />
and control problem <strong>of</strong> car-like mobile robots which is required to<br />
move safely to a designated target <strong>in</strong> a priori known workspace<br />
cluttered with swarm <strong>of</strong> boids exhibit<strong>in</strong>g collective emergent<br />
behaviors. A generalized algorithm for target convergence and<br />
swarm avoidance is proposed that will work for any number <strong>of</strong><br />
swarms. The control laws proposed <strong>in</strong> this paper also ensures<br />
practical stability <strong>of</strong> the system. The effectiveness <strong>of</strong> the proposed<br />
control laws are demonstrated via computer simulations <strong>of</strong> an<br />
emergent behavior.<br />
Keywords—<strong>Swarm</strong>, practical stability, motion plann<strong>in</strong>g,<br />
emergent.<br />
I. INTRODUCTION<br />
RAJECTORY plann<strong>in</strong>g and control <strong>of</strong> holonomic and<br />
Tnonholonomic<br />
systems has been an active area <strong>of</strong> research<br />
for more than two decades now. Basically, it <strong>in</strong>volves f<strong>in</strong>d<strong>in</strong>g<br />
a feasible trajectory from some <strong>in</strong>itial configuration to a<br />
desired one while satisfy<strong>in</strong>g the velocity constra<strong>in</strong>ts <strong>of</strong> the<br />
system. In recent years, with the rapid advances <strong>in</strong> sens<strong>in</strong>g,<br />
communication, computation, and actuation capabilities,<br />
groups or swarms are expected to cooperatively perform<br />
dangerous or explorative tasks <strong>in</strong> a broad range <strong>of</strong> potential<br />
applications. As highlighted by Latombe [1], motion plann<strong>in</strong>g<br />
is “em<strong>in</strong>ently necessary, s<strong>in</strong>ce, by def<strong>in</strong>ition, a robot<br />
accomplishes tasks by mov<strong>in</strong>g <strong>in</strong> the real world”. The essence<br />
<strong>of</strong> robot motion plann<strong>in</strong>g problem can be formulated as a twodimensional<br />
problem and is captured <strong>in</strong> the follow<strong>in</strong>g classic<br />
def<strong>in</strong>ition (adopted from [2]):<br />
Def<strong>in</strong>ition 1: Given a robot and a description <strong>of</strong> its<br />
workspace, propose a path that the robot can follow. In<br />
particular, if the workspace is cluttered with solid objects,<br />
propose a collision-free path that can lead the mobile robot<br />
from the desired start<strong>in</strong>g po<strong>in</strong>t to the desired goal or target.<br />
Devis<strong>in</strong>g motion plann<strong>in</strong>g algorithms for multi-agents<br />
shar<strong>in</strong>g a common workspace is <strong>in</strong>herently difficult. This is a<br />
result <strong>of</strong> the environment be<strong>in</strong>g no longer static but dynamic.<br />
Static environments have provided excellent breed<strong>in</strong>g grounds<br />
for high-powered algorithms so far. However, more recently<br />
there has been a shift <strong>of</strong> emphasis to <strong>in</strong>clude dynamic<br />
environments due to its applications <strong>in</strong> the real world. The<br />
dynamic environment is composed <strong>of</strong> both the stationary and<br />
the unpredictable (or predictable) dynamic obstacles [3].<br />
Jai Raj is a Teach<strong>in</strong>g Assistant <strong>in</strong> Mathematics at the University <strong>of</strong> the<br />
South Pacific. He is currently pursu<strong>in</strong>g a MSc Degree <strong>in</strong> the School <strong>of</strong><br />
Comput<strong>in</strong>g, Information & Mathematical Sciences, University <strong>of</strong> the South<br />
Pacific, Suva, Fiji (e-mail: raj_j@usp.ac.fj).<br />
Jito Vanualailai and Bibhya Sharma are Associate Pr<strong>of</strong>essors at the<br />
University <strong>of</strong> the South Pacific.<br />
<strong>World</strong> <strong>Academy</strong> <strong>of</strong> Science, Eng<strong>in</strong>eer<strong>in</strong>g and Technology 72 2012<br />
<strong>Swarm</strong> <strong>Navigation</strong> <strong>in</strong> a <strong>Complex</strong> <strong>Environment</strong><br />
Jai Raj, Jito Vanualailai, Bibhya Sharma, and Shonal S<strong>in</strong>gh<br />
1157<br />
These dynamic obstacles can <strong>in</strong>corporate the mobile robots<br />
themselves as well as other mov<strong>in</strong>g solid objects or obstacles<br />
<strong>in</strong> the environment. Thus, fundamental to the motion plann<strong>in</strong>g<br />
problem <strong>of</strong> multi-agents is the need to control and plan the<br />
motions <strong>of</strong> the agents that would yield <strong>in</strong>ter-agent and agent to<br />
obstacle collision avoidances. Numerous papers have<br />
discussed this problem, some <strong>of</strong> which <strong>in</strong>cludes methods such<br />
as discretization <strong>of</strong> the configuration time-space us<strong>in</strong>g<br />
sequential space slic<strong>in</strong>g [4], sheared cyl<strong>in</strong>drical<br />
representations <strong>of</strong> mov<strong>in</strong>g obstacles and generat<strong>in</strong>g optimal<br />
tangential paths to the goals [5], hybrid systems [6], threaded<br />
petri nets [7], plan-merg<strong>in</strong>g [8], negotiations [9], onl<strong>in</strong>e<br />
artificial potential fields strategy [1], [10], decomposition <strong>of</strong><br />
the problem <strong>in</strong>to path plann<strong>in</strong>g and velocity plann<strong>in</strong>g subproblems<br />
[11] and a Lyapunov based control scheme for<br />
various nonholonomic multi-agents [2], [3], [12], to name a<br />
few.<br />
This article explores the challeng<strong>in</strong>g but <strong>in</strong>dispensable area<br />
<strong>of</strong> multi-agent research. We will consider multiple vehicles<br />
and dynamic environments. The other novel aspects <strong>of</strong> this<br />
article are the mov<strong>in</strong>g obstacles, that is, the swarm <strong>of</strong> boids.<br />
Hence, there will be a number <strong>of</strong> car-like robots mov<strong>in</strong>g<br />
between start and goal configurations <strong>in</strong> a constra<strong>in</strong>ed<br />
environment.<br />
II. SYSTEM MODELLING<br />
In this section, we shall model a rear driven car-like vehicle<br />
and a general 2-dimensional swarm. Both the models will be<br />
used to illustrate via the Lyapunov based control scheme the<br />
effectiveness <strong>of</strong> the system models.<br />
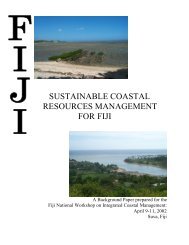
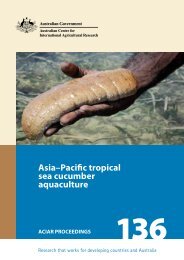
A. Vehicle Model - The K<strong>in</strong>ematics and Dynamics <strong>of</strong> the<br />
Car-like Robot<br />
In this subsection, the k<strong>in</strong>ematics and the dynamics <strong>of</strong> a<br />
car-like system will be described. The vehicle model consists<br />
<strong>of</strong> a rear wheel driven car-like vehicle, whereby eng<strong>in</strong>e power<br />
is applied to the rear wheels (see Fig. 1). Although polar<br />
coord<strong>in</strong>ates are more popular with mov<strong>in</strong>g obstacle [13], we<br />
utilize the Cartesian coord<strong>in</strong>ate system s<strong>in</strong>ce it does not <strong>in</strong>ject<br />
undesired s<strong>in</strong>gularities <strong>in</strong>to the navigation problem [2].<br />
Def<strong>in</strong>ition 2: The k th nonholonomic car-like mobile robot is<br />
a circular disk with rv k and is positioned at center ( xvk, yv k)<br />
.<br />
In addition, the k th car-like robot is the set<br />
2<br />
2 2<br />
A = z , z ∈R : z − xv + z − yv ≤ rv ,<br />
k { ( 1 2) ( 1 k) ( 2 k) k}<br />
for k { 1,..., m} , m ,<br />
∈ ∈N where A k embodies a rear-wheel<br />
driven and front-wheel steered car-like vehicle.
Fig. 1 A rear wheel driven vehicle with front wheel steer<strong>in</strong>g and<br />
steer<strong>in</strong>g angle φ k .<br />
Inclusion <strong>of</strong> the dynamics will then be produc<strong>in</strong>g a<br />
trajectory <strong>in</strong> the state-space. Thus, if m k is the mass <strong>of</strong> the<br />
vehicle, k F the force along the axis <strong>of</strong> the vehicle, Γk the<br />
torque about a vertical axis at ( xvk, yv k)<br />
and I k the moment<br />
<strong>of</strong> <strong>in</strong>ertia <strong>of</strong> the vehicle, then dynamic model <strong>of</strong> the vehicle is<br />
L ⎫<br />
xv k = vk cosθk − wk<br />
s<strong>in</strong> θk,<br />
2<br />
⎪<br />
⎪⎪<br />
L<br />
yv k = vk s<strong>in</strong>θk + wk<br />
cos θk,<br />
2 ⎪<br />
θk<br />
= wk,<br />
⎬<br />
⎪<br />
vk = σ k1: = Fk / mk,<br />
⎪<br />
⎪⎪⎪<br />
wk = σ k2: =Γk / Ik<br />
⎭<br />
where the variable θ k gives the vehicles’s orientation with<br />
respect to the ma<strong>in</strong> axes, k v and w k are the translational and<br />
rotational velocities, respectively, while σ k1<br />
and k 2<br />
(1)<br />
σ are,<br />
respectively, the <strong>in</strong>stantaneous translational and rotational<br />
accelerations.<br />
Referr<strong>in</strong>g to Fig. 1, to ensure that the entire vehicle safely<br />
steers past an obstacle, the planar vehicle will be enclosed by<br />
the smallest circle possible. L and l are, respectively, the<br />
length and width <strong>of</strong> the vehicle, then given the clearance<br />
parameters ε 1 and ε 2 , enclose the vehicle by a protective<br />
xv , yv , with radius<br />
circular region centered at ( )<br />
k k<br />
( ε ) ( ε )<br />
2 2<br />
1 2<br />
rv : = 2 + L + 2 + l /2.<br />
k<br />
<strong>World</strong> <strong>Academy</strong> <strong>of</strong> Science, Eng<strong>in</strong>eer<strong>in</strong>g and Technology 72 2012<br />
1158<br />
Assumption 1: The <strong>in</strong>stantaneous accelerations σ k1<br />
and σ k 2<br />
can move the car-like robot <strong>of</strong> A k to its designated target and<br />
atta<strong>in</strong> the desired f<strong>in</strong>al orientation.<br />
B. A Two Dimensional <strong>Swarm</strong> Model<br />
Follow<strong>in</strong>g the nomenclature <strong>of</strong> Reynolds [15], each<br />
member <strong>of</strong> the flock is denoted as a boid. We shall construct a<br />
model <strong>of</strong> a swarm with m <strong>in</strong>dividuals mov<strong>in</strong>g with the<br />
velocity <strong>of</strong> the swarm’s centroid. Follow<strong>in</strong>g previous work<br />
such as those <strong>of</strong> [16] and [17], we consider the <strong>in</strong>dividuals as<br />
po<strong>in</strong>t masses.<br />
At time t ≥ 0 , let ( xbi( t) , ybi( t) ) , i = 1,..., n be the planar<br />
position <strong>of</strong> the i th <strong>in</strong>dividual, which we shall def<strong>in</strong>e as a<br />
po<strong>in</strong>t mass resid<strong>in</strong>g <strong>in</strong> a disk <strong>of</strong> radius rb i > 0,<br />
2 2 2 2<br />
{ ( 1 2) ( 1 ) ( 2 ) }<br />
B = z , z ∈R : z − xb + z − yb ≤ rb . (2)<br />
i i i i<br />
( ) ( ( ) ( ) )<br />
At time t ≥ 0 , let vbi ( t) , wbi ( t) : = xb i t , yb i t be its<br />
<strong>in</strong>stantaneous velocity <strong>of</strong> the i th po<strong>in</strong>t mass. Us<strong>in</strong>g the above<br />
notations, we thus have a system <strong>of</strong> first order ODE’s for the<br />
t = t ≥ :<br />
i th <strong>in</strong>dividual, assum<strong>in</strong>g the <strong>in</strong>itial conditions at 0 0<br />
( ) ,<br />
() ,<br />
( ) ( )<br />
xb i = vbi t<br />
⎫<br />
⎪<br />
yb i = wbi t<br />
⎬ (3)<br />
⎪<br />
xbi0 : = xbi t0 , ybi0 = ybi y0<br />
. ⎭<br />
2<br />
2<br />
If gi ( x) : = ( vbi, wbi)<br />
∈Rand G( x) : = ( g1( x) ,..., gn( x)<br />
) ∈R<br />
, then our swarm system <strong>of</strong> m <strong>in</strong>dividuals is<br />
( ) ( )<br />
x = G x , x = x t .<br />
(4)<br />
0 0<br />
Def<strong>in</strong>ition 3: System (4) is said to be<br />
(S1) practically stable if given ( λ , A)<br />
with 0 < λ < A , we<br />
have<br />
* () ()<br />
*<br />
x0x λ<br />
− < implies that<br />
x t − x t < A, t ≥ t0for<br />
some t 0 ∈ R + ;<br />
(S2) uniformly practically stable if (S1) holds for every<br />
t 0 ∈ R + .<br />
The follow<strong>in</strong>g comparison pr<strong>in</strong>ciple for practical stability is<br />
also adapted from [18] for system (4), where,<br />
K = { a∈C[ R+ , R+ ] : a( u)<br />
is strictly <strong>in</strong>creas<strong>in</strong>g <strong>in</strong> u and<br />
2 n<br />
a( u) →∞ as u →∞, S( ρ ) = { x∈R :<br />
*<br />
x− x < ρ}<br />
, and,<br />
2 n<br />
for any Lyapunov-like function V ∈ C ⎡<br />
⎣R+ × R , R ⎤ + ⎦,<br />
V( t+ h, x+ hG( x) ) −V(<br />
t, x)<br />
+<br />
DV( tx , ) : = limsup ,<br />
+<br />
h→0<br />
h<br />
for<br />
2n<br />
1<br />
( tx , ) ∈ R+ × R , not<strong>in</strong>g that if V ∈ C [ R+ × R2 n,<br />
R + ] , then<br />
+<br />
DV tx , V' tx , , V ' t, x = V t, x + V t, x G x .<br />
( ) = ( ) where ( ) ( ) ( ) ( )<br />
t x<br />
n
Theorem 1: Lakshmikantham, Leela and Martynyuk [18].<br />
Assume that<br />
1. λ and A are given such that 0 < λ < A ;<br />
2 n<br />
2. V ∈ C ⎡<br />
⎣R+ × R , R ⎤ + ⎦ and V ( t, x ) is locally Lipschitzian<br />
<strong>in</strong> x ;<br />
* *<br />
3. for ( tx) ∈ R + × S( A) b1( x−x) ≤V( tx) ≤b2( x−x) , , , ,<br />
2<br />
∈ and ( ) ( ( ) )<br />
+<br />
b1, b2 K DV tx , ≤ q tV , tx , , q∈C⎡ ⎣R+ , R ⎤<br />
⎦;<br />
4. b2( λ ) < b1( A)<br />
holds.<br />
Then the practical stability properties <strong>of</strong> the scalar<br />
differential equation<br />
( ) ( ) ( )<br />
z' t = q t, z , z t = z ≥ 0,<br />
0 0<br />
imply the correspond<strong>in</strong>g practical stability properties <strong>of</strong><br />
system (4).<br />
III. DEPLOYMENT OF THE LYAPUNOV-BASED<br />
CONTROL SCHEME<br />
The pr<strong>in</strong>cipal control objective <strong>of</strong> this section is to utilize<br />
the Lyapunov-based control scheme to design the translational<br />
acceleration σ k1<br />
and the rotational acceleration σ k 2 such that<br />
the car-like vehicle, represented by system (1), will navigate<br />
safely among obstacles, reach a neighborhood <strong>of</strong> its<br />
dest<strong>in</strong>ation whilst respect<strong>in</strong>g k<strong>in</strong>odynamic constra<strong>in</strong>ts.<br />
A. Details <strong>of</strong> the Vehicular Agents<br />
1) Target <strong>of</strong> the Vehicle:<br />
Now, <strong>in</strong> the target-attraction component <strong>of</strong> the Lyapunovlike<br />
function, <strong>in</strong>tuitively, we want to have a k<strong>in</strong>d <strong>of</strong> a<br />
yardstick that measures, at time t ≥ 0 , the midpo<strong>in</strong>t position<br />
<strong>of</strong> A k from its dest<strong>in</strong>ation ( pk1, p k2)<br />
and the rate at which it<br />
approaches or moves away from ( pk1, p k2)<br />
. A choice <strong>of</strong><br />
probable target attractive functions that could accomplish this,<br />
on suppress<strong>in</strong>g t , is<br />
1<br />
2 2 2 2<br />
Vk ( x) = ⎡( xvk − pk1) + ( yvk − pk2) + vk + w ⎤<br />
k .<br />
2 ⎣ ⎦<br />
2) Convergence <strong>of</strong> the Vehicle (Car-like robot):<br />
We need to guarantee the convergence <strong>of</strong> the car-like robot<br />
to its prescribed target and ensure that the nonl<strong>in</strong>ear<br />
controllers vanish at the target configuration. We adopt a new<br />
attractive function whose role is purely mathematical, and<br />
hence auxiliary. This function will be multiplied to each <strong>of</strong> the<br />
obstacle avoidance functions. This strategy implicitly<br />
guarantees that the goal configuration is a global m<strong>in</strong>imum <strong>of</strong><br />
the total potential. Thus an appropriate auxiliary function is<br />
def<strong>in</strong>ed as follows:<br />
1<br />
2 2 2<br />
Gk ( x) = ⎡( xvk − pk1) + ( yvk − pk2) + ( θk<br />
− pk3)<br />
⎤.<br />
2 ⎣ ⎦<br />
<strong>World</strong> <strong>Academy</strong> <strong>of</strong> Science, Eng<strong>in</strong>eer<strong>in</strong>g and Technology 72 2012<br />
1159<br />
3) K<strong>in</strong>odynamic Constra<strong>in</strong>ts:<br />
The k<strong>in</strong>odynamic plann<strong>in</strong>g problem <strong>in</strong>volves synthesiz<strong>in</strong>g a<br />
robots motion subject to k<strong>in</strong>ematic constra<strong>in</strong>ts, such as any<br />
fixed or mov<strong>in</strong>g obstacle <strong>in</strong> the workspace and dynamic<br />
constra<strong>in</strong>ts, such as modulus bound on velocity.<br />
Workspace: Boundary Limitations:<br />
The boundaries <strong>of</strong> the workspace are considered as fixed<br />
obstacles, which have to be avoided by each articulated body<br />
at every time t ≥ 0 so that the robot is conf<strong>in</strong>ed with<strong>in</strong> the<br />
workspace. Accord<strong>in</strong>gly, for the avoidance we construct the<br />
follow<strong>in</strong>g obstacle avoidance functions for the avoidance <strong>of</strong><br />
the left, lower, right and upper boundaries, respectively, as<br />
follows:<br />
WVk1= xvk −rvk,<br />
WVk2= yvk −rvk,<br />
WVk3 = b1−( xvk −rvk)<br />
,<br />
WV = b − yv −rv.<br />
( )<br />
k4 2 k k<br />
Each <strong>of</strong> these is positive with<strong>in</strong> the rectangle. That is,<br />
WVk1, WV k3<br />
> 0,<br />
for all xvk ∈( rvk, b1−rvk) and<br />
WV , WV > 0 for all yv ∈( rv , b − rv ) .<br />
k2 k4<br />
k k 2 k<br />
Modulus Bound on Velocities:<br />
From a practical viewpo<strong>in</strong>t, the translational speed and the<br />
steer<strong>in</strong>g angle <strong>of</strong> a car-like system are limited. If v max > 0 is<br />
the maximum speed, and φ max is the maximum steer<strong>in</strong>g angle<br />
satisfy<strong>in</strong>g 0 < φmax < π /2 then, as shown <strong>in</strong> [19], the<br />
additional constra<strong>in</strong>ts imposed on the translational and the<br />
rotational velocities are:<br />
i. vk< vmax<br />
, where v max is the maximal achievable speed<br />
<strong>of</strong> the mobile robot;<br />
ii. wk<br />
≤<br />
vk ρm<strong>in</strong> <<br />
vmax<br />
ρm<strong>in</strong><br />
where ρ m<strong>in</strong> is known as the<br />
P<br />
m<strong>in</strong>imum turn<strong>in</strong>g radius and is given as ρm<strong>in</strong><br />
=<br />
tanφ<br />
.<br />
For the avoidance, we design the follow<strong>in</strong>g obstacle<br />
avoidance functions:<br />
1<br />
Uk1( x) = ( vmax − vk)( vmax + vk)<br />
,<br />
2<br />
1 ⎛ vmax Uk2( x) = ⎜<br />
2 ⎜<br />
⎝ ρm<strong>in</strong> ⎞⎛ vmax<br />
− wk ⎟⎜<br />
⎠⎝ ρm<strong>in</strong><br />
⎞<br />
+ wk<br />
⎟,<br />
⎟<br />
⎠<br />
for k = 1,..., n,<br />
which would guarantee the adherence to the<br />
limitations placed upon translational velocity v k and the<br />
steer<strong>in</strong>g angle φ k , respectively.<br />
max
4) Inter-<strong>in</strong>dividual Collision Avoidance for the Carlike<br />
Mobile Robots:<br />
In practice, the control algorithms must generate feasible<br />
trajectories based upon real-time perceptual <strong>in</strong>formation. A<br />
mov<strong>in</strong>g car-like mobile robot itself becomes a mov<strong>in</strong>g<br />
obstacle for all the other car-like mobile robots <strong>in</strong> the<br />
workspace. First, we make the follow<strong>in</strong>g assumption:<br />
Assumption 1: Due to the determ<strong>in</strong>istic nature <strong>of</strong> our<br />
k<strong>in</strong>odynamic system, there is a prior knowledge <strong>of</strong> the<br />
directions <strong>of</strong> motion and the <strong>in</strong>stantaneous velocities <strong>of</strong> the<br />
car like robots available to the system.<br />
For car k A to avoid car A l , we design repulsive potential<br />
field functions with the associated obstacle avoidance function<br />
<strong>of</strong> the form<br />
1<br />
2 2 2<br />
M kl ( x) = ⎡( xvk − xvl ) + ( yvk − yvl ) − ( rvk + rvl<br />
) ⎤,<br />
2 ⎣ ⎦<br />
for kl , = 1,..., ml , ≠ k.<br />
B. Details <strong>of</strong> the Leader-less <strong>Swarm</strong><br />
For the attraction <strong>of</strong> the swarm to the centroid and for the<br />
<strong>in</strong>ter-<strong>in</strong>dividual avoidance <strong>of</strong> the swarm, the functions are:<br />
1) Attraction to the Centroid:<br />
To ensure that the <strong>in</strong>dividuals <strong>of</strong> the swarm are attracted<br />
towards each other and also form a cohesive group by hav<strong>in</strong>g<br />
a measurement <strong>of</strong> the distance from the ith <strong>in</strong>dividual to the<br />
swarm centroid, we use the follow<strong>in</strong>g attraction function:<br />
2 2<br />
⎡ n n ⎤<br />
1 ⎛ 1 ⎞ ⎛ 1 ⎞<br />
Ri ( x) = ⎢⎜xbi − ∑xbj ⎟ + ⎜ybi − ∑ ybj<br />
⎟ ⎥.<br />
2 ⎢⎝ n j= 1 ⎠ ⎝ n j=<br />
1<br />
⎣ ⎠ ⎥<br />
⎦<br />
2) Avoidance <strong>of</strong> the Boundaries <strong>of</strong> the Workspace: This<br />
subsection adopts the planar workspace WS designed <strong>in</strong> the<br />
previous section. For the avoidance <strong>of</strong> the left, upper, right<br />
and lower boundaries, the follow<strong>in</strong>g functions are utilized,<br />
respectively:<br />
where ( )<br />
WBi1= xbi −rbi,<br />
WBi2= ybi −rbi,<br />
WBi3 = b1− xbi −rbi<br />
WB = b − yb −rb<br />
( ) ,<br />
( ) ,<br />
i4 2 i i<br />
2<br />
{ 1 2 1 1 2 2}<br />
WS : = z , z ∈R:0 ≤ z ≤b,0≤ z ≤band<br />
not<strong>in</strong>g<br />
that they are all positive with<strong>in</strong> the workspace.<br />
3) Inter-<strong>in</strong>dividual Collision Avoidance:<br />
For the boids to avoid each other, we design repulsive<br />
potential field functions <strong>of</strong> the form<br />
1<br />
2 2 2<br />
Qij ( x) = ⎡( xbi − xbj ) + ( ybi − ybj ) − ( rbi + rbj<br />
) ⎤,<br />
2 ⎢⎣ ⎥⎦<br />
for i, j = 1,..., n, j ≠ i.<br />
The function is an Euclidean measure<br />
<strong>of</strong> the distance between the <strong>in</strong>dividual boids, and will appear<br />
<strong>in</strong> the denom<strong>in</strong>ator <strong>of</strong> an appropriate term <strong>in</strong> the candidate<br />
Lyapunov-like function to be proposed.<br />
<strong>World</strong> <strong>Academy</strong> <strong>of</strong> Science, Eng<strong>in</strong>eer<strong>in</strong>g and Technology 72 2012<br />
1160<br />
4) Avoidance <strong>of</strong> Vehicular Agents by the Boids:<br />
In practice, effective avoidance <strong>of</strong> mov<strong>in</strong>g obstacles is<br />
etiquette for mobile robots. Hence, avoidance <strong>of</strong> the mov<strong>in</strong>g<br />
swarms is another addition to the multitask<strong>in</strong>g problem <strong>in</strong> this<br />
paper. Here, the car-like mobile robots becomes the mov<strong>in</strong>g<br />
obstacles for the swarm <strong>of</strong> boids <strong>in</strong> the workspace. This is a<br />
one-way collision avoidance whereby the swarm <strong>of</strong> boids<br />
avoids the car-like mobile robots. For the boids to avoid the<br />
vehicular agents, we design repulsive potential field function<br />
<strong>of</strong> the form<br />
1<br />
2 2 2<br />
Sik ( x) = ⎡( xbi − xvk ) + ( ybi − yvk ) − ( rbi + rvk<br />
) ⎤ ,<br />
2 ⎣ ⎦<br />
where k = 1,..., m and i = 1,..., n.<br />
IV. DESIGN OF NONLINEAR CONTROLLERS<br />
This section will represent a Lyapunov-like function<br />
candidate and the nonl<strong>in</strong>ear control laws for systems (1) and<br />
(3) will be designed. In parallel, we will consider the stability<br />
analysis perta<strong>in</strong><strong>in</strong>g to the dynamic system.<br />
A. Lyapunov Function<br />
As per the LbCS, we comb<strong>in</strong>e all the attractive and<br />
repulsive potential field functions, and <strong>in</strong>troduc<strong>in</strong>g tun<strong>in</strong>g<br />
parameters γ i > 0, ηis > 0, βij > 0, σik > 0, τks > 0, ϕkl<br />
> 0<br />
and ξ ku > 0 for i, jklmnsu∈ , , , , , , N we def<strong>in</strong>e a Lyapunovlike<br />
function candidate for systems (1) and (3) as<br />
⎡ ⎛ ⎞⎤<br />
n 4<br />
n m<br />
η β<br />
is ij σik<br />
Lx ( ) =<br />
⎢<br />
γiRi(<br />
x) Ri( x)<br />
⎜ ⎟⎥<br />
∑ + + +<br />
⎢ ⎜∑ i 1 s 1 is ( )<br />
∑<br />
j 1 ij ( )<br />
∑<br />
WB x Q x k 1Sik<br />
( x)<br />
⎟⎥<br />
= = = =<br />
⎢<br />
⎜ ⎟<br />
⎣ ⎝ j≠i ⎠⎥⎦<br />
⎡ ⎛ ⎞⎤<br />
m 4 m<br />
2<br />
τksϕkl ξku<br />
+<br />
⎢<br />
Vk ( x) Gk ( x)<br />
⎜ ⎟⎥<br />
∑ + + +<br />
⎢ ⎜∑ k= 1 s= 1WVks ( x) ∑<br />
l= 1 Mkl ( x) ∑<br />
u=<br />
1Uku<br />
( x)<br />
⎟⎥<br />
⎢<br />
⎜ ⎟<br />
⎣ ⎝ l≠k ⎠⎥⎦<br />
B. Controller Design<br />
To extract the control laws for the k<strong>in</strong>odynamic system, we<br />
differentiate the various components <strong>of</strong> L( x ) separately with<br />
respect to t along a solution <strong>of</strong> systems (1) and (3), carry out<br />
the necessary substitutions and upon suppress<strong>in</strong>g x , we have<br />
the follow<strong>in</strong>g for the swarm <strong>of</strong> boids and the vehicular agents:<br />
1) <strong>Swarm</strong> <strong>of</strong> boids: Upon suppress<strong>in</strong>g x and for i = 1,..., n ,<br />
we have
⎛ ⎞ n β n<br />
ij ⎛ 1 ⎞ ⎛ ηi3 η ⎞ i1<br />
Lxi =<br />
⎜γi +<br />
⎟<br />
xbi − xbj + Ri<br />
−<br />
⎜ ∑ 2 2<br />
j 1Qij ( x) ⎟⎜<br />
∑ ⎟ ⎜ ⎟<br />
⎜ = ⎟⎝ n j=<br />
1 ⎠ ⎝WBi3 WBi1<br />
⎠<br />
⎝ j≠i ⎠<br />
−2 R<br />
β<br />
xb −xb −R σ<br />
xb −xv<br />
,<br />
( ) ( )<br />
n m<br />
ij ik<br />
i∑ 2 i j i 2 i k<br />
j 1 ( )<br />
∑<br />
= Qij x k=<br />
1 Sik<br />
j≠i ⎛ ⎞ n n<br />
ij 1<br />
i4 i2<br />
Ly<br />
⎜ β η η<br />
i γ<br />
⎟⎛<br />
⎞ ⎛ ⎞<br />
= i + ybi − ybj + Ri<br />
−<br />
⎜ ∑ 2 2<br />
j= 1Qij ( x) ⎟⎜<br />
∑ ⎟ ⎜ ⎟<br />
⎜ ⎟⎝ n j=<br />
1 ⎠ ⎝WBi4 WBi2<br />
⎠<br />
⎝ j≠i ⎠<br />
n β m<br />
ij σ ik<br />
−2 Ri∑ 2 ( ybi − ybj) −Ri∑ 2 ( ybi − yvk)<br />
.<br />
Q x S<br />
( )<br />
j= 1 ij k=<br />
1 ik<br />
j≠i Next, given the convergence parameters αi1, α i2<br />
> 0,<br />
the<br />
nonl<strong>in</strong>ear velocity controllers for the swarm <strong>of</strong> boids is:<br />
where i = 1,..., n.<br />
vb =−α<br />
Lx ,<br />
i i1i wb =−α<br />
Ly ,<br />
i i2i 2) Vehicular Agents: Upon suppress<strong>in</strong>g x and<br />
for k = 1,..., m,<br />
we have<br />
f<br />
⎛<br />
=<br />
⎜<br />
1+<br />
⎜<br />
4 τ<br />
+<br />
m ϕ<br />
+<br />
2 ξ<br />
⎞<br />
⎟<br />
⎟<br />
xv − p<br />
⎝ ⎠<br />
ks kl ku<br />
∑ ( )<br />
1 ( )<br />
∑<br />
1 ( )<br />
∑<br />
s= WV x l= M x u=<br />
1U(<br />
x)<br />
k1 k k1<br />
⎜ ks kl ku ⎟<br />
l≠k f<br />
k 2<br />
⎛ τ τ ⎞ ϕ<br />
+ G − −G xv −xv<br />
m<br />
k3 k1 kl<br />
k ⎜ 2 2 ⎟ k∑2 k l<br />
⎝WVk3 WVk1 ⎠ l = 1 M kl x<br />
l≠k m ϕ<br />
+ G xv −xv<br />
∑<br />
kl ( )<br />
( )<br />
l 2<br />
l k<br />
l = 1 Mkl x<br />
l≠k ,<br />
( )<br />
( )<br />
⎛ ⎞<br />
4 m<br />
2<br />
τ ϕ ξ<br />
=<br />
⎜<br />
1+<br />
+ +<br />
⎟<br />
⎜<br />
ks kl ku ⎟<br />
⎝ l≠k ⎠<br />
ks kl ku<br />
∑<br />
1 ( )<br />
∑<br />
1 ( )<br />
∑ ( yvk − pk2)<br />
s= WV x l= M x u=<br />
1U(<br />
x)<br />
⎟<br />
⎛ τ τ ⎞ ϕ<br />
+ G − −G yv − yv<br />
m<br />
k4 k2 kl<br />
k ⎜ 2 2 ⎟ k∑2 k l<br />
⎝WVk4 WVk2 ⎠ l = 1 M kl x<br />
l≠k m ϕ<br />
+ G yv − yv<br />
∑<br />
kl ( )<br />
( )<br />
l 2<br />
l k<br />
l = 1 Mkl x<br />
l≠k ξ<br />
g = 1 + G ,<br />
U<br />
k1<br />
k1k 2<br />
k1<br />
ξ<br />
g = 1 + G .<br />
U<br />
k 2<br />
k2k 2<br />
k 2<br />
,<br />
( )<br />
( )<br />
Next, given convergence parameters δ k1, δ k2<br />
> 0,<br />
the<br />
translational and rotational speeds are given the follow<strong>in</strong>g<br />
forms:<br />
− δ × v = f x cosθ + f x s<strong>in</strong>θ<br />
+ g x u<br />
( ( ) ( ) ) ( )<br />
L<br />
( ( ) cos ( ) s<strong>in</strong> ) ( )<br />
k1 k k1 k k2 k k1 k1<br />
− δ × w = f x θ − f x θ + g x u<br />
2<br />
k2 k k2 k k1 k k2 k2<br />
<strong>World</strong> <strong>Academy</strong> <strong>of</strong> Science, Eng<strong>in</strong>eer<strong>in</strong>g and Technology 72 2012<br />
(5)<br />
1161<br />
where k = 1,..., m and L is the length <strong>of</strong> the k th car.<br />
Hence, along a trajectory <strong>of</strong> system (1)<br />
m<br />
2 2<br />
( ) ∑(<br />
δk1 k δk2<br />
k )<br />
L x = − v + w ≤0<br />
(6)<br />
k = 1<br />
provided that the state feedback nonl<strong>in</strong>ear navigation laws<br />
govern<strong>in</strong>g the k th car are <strong>of</strong> the form<br />
( δ θ θ )<br />
u =− v + f cos + f s<strong>in</strong> / g ,<br />
k1 k1 k k1 k k2 k k1<br />
⎡ L<br />
⎤<br />
uk1 =− ⎢δk2vk + ( fk2cosθk −fk1s<strong>in</strong><br />
θk)<br />
/ gk2.<br />
2<br />
⎥<br />
⎣ ⎦<br />
Note that L ( x) ≤ 0 for all x ∈ D( L( x)<br />
).<br />
V. STABILITY ANALYSIS<br />
Theorem 2: System (1) and (3) is uniformly practically stable.<br />
Pro<strong>of</strong>: S<strong>in</strong>ce<br />
we have<br />
( ( ) ) 0<br />
L x t ≤ ,<br />
( ( ) ) ( ( ) )<br />
0 0<br />
(7)<br />
0≤L x t ≤ L x t ∀ t ≥t ≥ 0. (8)<br />
Accord<strong>in</strong>gly, for comparative analysis, it is sufficient to<br />
consider the practical stability <strong>of</strong> the scalar differential<br />
equation<br />
The solution is<br />
( ) ( )<br />
z' t = 0, z t = : z , t ≥ 0. (9)<br />
( )<br />
0 0 0<br />
z t; t , z = z ,<br />
0 0 0<br />
so that relative to every po<strong>in</strong>t *<br />
z ∈ R , we have<br />
( )<br />
z t; t , z − z = z − z ,<br />
* *<br />
0 0 0<br />
so that for any given number P 0 > 0,<br />
( )<br />
z t; t , z −z ≤ z − z + P.<br />
* *<br />
0 0 0 0<br />
We shall next show that by apply<strong>in</strong>g Theorem 1, we can<br />
simultaneously derive the explicit form <strong>of</strong> P 0 > 0, with which<br />
it is easy to see that (S2) holds for equation (9) if<br />
( λ) λ 0<br />
A= A : = + P.<br />
To apply Theorem 1, we restrict our doma<strong>in</strong> to<br />
D( L( x) ) over which we see that L( x) ∈C⎡ ⎣<br />
D( L( x ) ), R ⎤ + ⎦<br />
,
and note that ( )<br />
( )<br />
S( ρ ) = { x∈ D( L( x)<br />
) :<br />
*<br />
( ) ( ( ) )<br />
( )<br />
L x is locally Lipschitzian <strong>in</strong> D L( x ) s<strong>in</strong>ce<br />
dL / dt ≤ 0 <strong>in</strong> D L( x ) . Re-def<strong>in</strong><strong>in</strong>g S ( ρ ) as<br />
and<br />
x− x < ρ}<br />
, we get<br />
*<br />
{ λ 0}<br />
S A = x∈D L x : x− x < + P .<br />
Recall<strong>in</strong>g that γ > 0, i ∈N , we let<br />
Further, let<br />
i<br />
m<strong>in</strong> : = m<strong>in</strong> i , i ∈N and γ max : max γ i , i<br />
γ γ<br />
( )<br />
1<br />
b x x : x x<br />
2<br />
* *<br />
2<br />
1 − = γ m<strong>in</strong> −<br />
= ∈N .<br />
( ) ( ) 2<br />
* 1<br />
*<br />
− = γ ⎡ − + ⎤<br />
b2 x x :<br />
2<br />
max ⎣<br />
x x L x0<br />
⎦<br />
,<br />
not<strong>in</strong>g that b1, b2 ∈ K . Then assum<strong>in</strong>g P 0 > 0 is given, we<br />
easily see that, with (8), we have<br />
* *<br />
( ) ( ) ( )<br />
b x−x ≤ L x ≤ b x−x for x ∈ S( A),<br />
s<strong>in</strong>ce<br />
1 2<br />
R x<br />
1⎡⎛ ⎢⎜xb ⎢<br />
⎣⎝ 1 ⎞<br />
xb ⎟<br />
⎠<br />
⎛<br />
⎜yb ⎝<br />
1 ⎞ ⎤<br />
yb ⎟ ⎥<br />
⎠ ⎥<br />
⎦<br />
1<br />
=<br />
2<br />
*<br />
x = x .<br />
b λ < b λ yields<br />
2 2<br />
n n n<br />
∑ ( ) = − ∑ + − ∑<br />
i i j i j<br />
i= 1 2 n j= 1 n j=<br />
1<br />
Indeed, the <strong>in</strong>equality ( ) ( )<br />
2 1<br />
1 2 1<br />
2<br />
γmax ⎡λ+ L( x0) < γm<strong>in</strong> [ λ+<br />
P0]<br />
,<br />
2<br />
⎣ ⎤⎦<br />
2<br />
which holds if we choose<br />
⎡⎛ γ ⎞ ⎛<br />
max γ ⎞⎤<br />
max<br />
P0 > ⎢⎜ − 1 ⎟+ ⎜ L( x0)<br />
⎟⎥.<br />
⎢<br />
⎜ γ ⎟ ⎜<br />
m<strong>in</strong> γ ⎟<br />
⎣⎝ ⎠ ⎝ m<strong>in</strong> ⎠⎥⎦<br />
γ<br />
γ<br />
S<strong>in</strong>ce max<br />
m<strong>in</strong><br />
≥ 1 for any γ max , γ m<strong>in</strong> > 0,<br />
and because <strong>of</strong> (8), it is<br />
clear that P 0 exists and P 0 > 0 . Thus, with q( t, z ) = 0,<br />
we<br />
conclude the pro<strong>of</strong> <strong>of</strong> Theorem 2.<br />
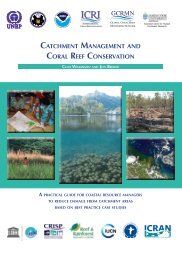
VI. SIMULATION<br />
This section demonstrates the simulation results for the carlike<br />
mobile robots navigat<strong>in</strong>g <strong>in</strong> a well-def<strong>in</strong>ed workspace<br />
cluttered with mov<strong>in</strong>g obstacles. The stability results obta<strong>in</strong>ed<br />
from the Lyapunov-like function will be verified numerically.<br />
In this scenario, the car-like mobile robots move from an<br />
<strong>in</strong>itial configuration to the target position whilst avoid<strong>in</strong>g each<br />
other and the swarm <strong>of</strong> boids on its way to its target. This<br />
scenario could be modeled as a swarm <strong>of</strong> bees or pigeons<br />
follow<strong>in</strong>g a car from one dest<strong>in</strong>ation to another.<br />
<strong>World</strong> <strong>Academy</strong> <strong>of</strong> Science, Eng<strong>in</strong>eer<strong>in</strong>g and Technology 72 2012<br />
1162<br />
Fig. 2 The <strong>in</strong>itial position <strong>of</strong> the car-like mobile robot and the swarm<br />
<strong>of</strong> boids<br />
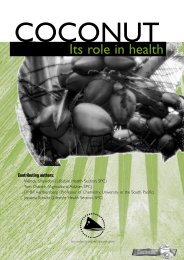
Fig. 3 The car-like mobile robot avoid<strong>in</strong>g the swarm <strong>of</strong> boids at<br />
t = 100 units
Fig. 4 The car-like mobile robot avoid<strong>in</strong>g the swarm <strong>of</strong> boids at<br />
t = 400 units<br />
Fig. 5 The car-like mobile robot avoid<strong>in</strong>g the swarm <strong>of</strong> boids at<br />
t = 500 units<br />
VII. CONCLUSION<br />
The paper essays a simple approach for solv<strong>in</strong>g the motion<br />
plann<strong>in</strong>g and control problem <strong>of</strong> car-like mobile robots. A<br />
target convergence and swarm avoidance scheme is developed<br />
and the control laws are designed us<strong>in</strong>g the Lyapunov-based<br />
control scheme so that the car-like mobile robots converge to<br />
their respective targets while avoid<strong>in</strong>g collisions with a swarm<br />
<strong>of</strong> boids along their paths.<br />
The nonl<strong>in</strong>ear control laws presented <strong>in</strong> this paper<br />
guarantees practical stability <strong>of</strong> the system. This has been<br />
proved us<strong>in</strong>g the Lakshmikantham, Leela and Martynyuk<br />
method [18]. The practical stability <strong>of</strong> the system has been<br />
<strong>World</strong> <strong>Academy</strong> <strong>of</strong> Science, Eng<strong>in</strong>eer<strong>in</strong>g and Technology 72 2012<br />
1163<br />
verified numerically via computer simulations. To the author’s<br />
knowledge, this is the first time the swarm <strong>of</strong> boids has been<br />
considered together with the car-like mobile robots.<br />
Future work will consider the <strong>in</strong>troduction <strong>of</strong> multi-shaped<br />
fixed obstacles <strong>in</strong>to the workspace.<br />
[1]<br />
REFERENCES<br />
J-C. Latombe, “Robot Motion Plann<strong>in</strong>g”, Kluwer Academic Publishers,<br />
USA, 1991.<br />
[2] B. Sharma, “New Directions <strong>in</strong> the Applications <strong>of</strong> the Lyapunov-based<br />
Control Scheme to the F<strong>in</strong>dpath Problem”, PhD thesis, University <strong>of</strong> the<br />
South Pacific, Suva, Fiji Islands, July 2008. PhD Dissertation.<br />
[3] B. Sharma, J. Vanualailai, and A. Prasad, “New collision avoidance<br />
scheme for multi-agents: A solution to the bl<strong>in</strong>dman’s problem”,<br />
Advances <strong>in</strong> Differential Equations and Control Processes, vol. 3, no. 2,<br />
pp. 141–169, 2009.<br />
[4] M. Erdmann and T. Lozano-Perez, “On multiple mov<strong>in</strong>g objects”, <strong>in</strong><br />
Proc. IEEE International Conference on Robotics and Automation, pp.<br />
1419 1424, 1986.<br />
[5] L. E. Parker, “A robot navigation algorithm for mov<strong>in</strong>g obstacles”,<br />
Master’s thesis, The University <strong>of</strong> Tennessee, Knoxville, 1988.<br />
[6] M. Egerstedt and C. F. Mart<strong>in</strong>, “Conflict resolution for autonomous<br />
vehicles: A case study <strong>in</strong> hierarchical control design”, International<br />
Journal <strong>of</strong> Hybrid Systems, vol. 2, no. 3, pp. 221–234, 2002.<br />
[7] E. Klav<strong>in</strong>s and D. E. Koditschek, “A formalism for the composition <strong>of</strong><br />
concurrent robot behaviors”, <strong>in</strong> Proc. IEEE International Conference on<br />
Robotics & Automation, pp 3395–3402, San Francisco, CA, 2000.<br />
[8] Alami, S. Fleury, M. Herrb, F. Ingrand, and F. Robert, “Multirobot<br />
cooperation <strong>in</strong> the martha project”, IEEE Robotics & Automation<br />
Magaz<strong>in</strong>e, vol. 5, pp. 36–47, 1998.<br />
[9] B. P. Gerkey and M. J. Mataric, “Auction methods for multirobot<br />
coord<strong>in</strong>ation”, <strong>in</strong> IEEE Transactions on Robotics & Automation, vol. 18,<br />
pp. 758–768, 2002.<br />
[10] D. Kostic, S. Ad<strong>in</strong>andra, J. Caarls, and H. Nijmeijer, “Collision free<br />
motion coord<strong>in</strong>ation <strong>of</strong> unicycle multi-agent systems”, <strong>in</strong> 2010 American<br />
Control Conference, America, 2010.<br />
[11] K. Kant and S. W. Zucker, “Toward efficiency trajectory plann<strong>in</strong>g: The<br />
path-velocity decomposition”, International Journal <strong>of</strong> Robotics<br />
Research, vol. 5, no. 3, pp. 72–89, 1986.<br />
[12] B. Sharma, J. Vanualailai, and A. Prasad, “Trajectory plann<strong>in</strong>g and<br />
posture control <strong>of</strong> multiple mobile manipulators”, International Journal<br />
<strong>of</strong> Applied Mathematics and Computation, vol. 2, no. 1, pp. 11–31,<br />
2010.<br />
[13] B. Kreczmer, “Robot local motion plann<strong>in</strong>g among mov<strong>in</strong>g obstacles”,<br />
<strong>in</strong> Proc. 8th IEEE International Conference on Intelligent<br />
Transportation Systems, pp. 419–424, Vienna, Austria, Sept. 13-16<br />
2005.<br />
[14] P. C-Y. Sheu and Q. Xue, “Intelligent Robotic Plann<strong>in</strong>g Systems”,<br />
<strong>World</strong> Scientific, S<strong>in</strong>gapore, 1993.<br />
[15] C. W. Reynolds, “Flocks, herds, and schools: A distributed behavioral<br />
model, <strong>in</strong> computer graphics”, <strong>in</strong> Proc. 14th annual conference on<br />
Computer graphics and <strong>in</strong>teractive techniques, pp. 25–34, New York,<br />
USA, 1987.<br />
[16] A. Mogilner, L. Edelste<strong>in</strong>-Keshet, L. Bent, and A. Spiros, “Mutual<br />
<strong>in</strong>teractions, potentials, and <strong>in</strong>dividual distance <strong>in</strong> asocial aggregation”,<br />
Journal <strong>of</strong> Mathematical Biology, vol. 47, pp. 353–389, 2003.<br />
[17] V. Gazi and K.M. Pass<strong>in</strong>o, “Stability analysis <strong>of</strong> social forag<strong>in</strong>g<br />
swarms”, <strong>in</strong> IEEE Transactions on Systems, Man and Cybernetics - Part<br />
B, vol. 34, no. 1, pp 539–557, 2004.<br />
[18] V. Lakshmikantham, S. Leela, and A. A. Martynyuk, “Practical Stability<br />
<strong>of</strong> Nonl<strong>in</strong>ear Systems”, <strong>World</strong> Scientific, S<strong>in</strong>gapore, 1990.<br />
[19] B. Sharma and J. Vanualailai, “Lyapunov stability <strong>of</strong> a nonholonomic<br />
car-like robotic system”, Nonl<strong>in</strong>ear Studies, vol. 14, no. 2, pp. 143– 160,<br />
2007.<br />
[20] K. S. Hwang and M. D. Tsai, “On-l<strong>in</strong>e collision avoidance trajectory<br />
plann<strong>in</strong>g <strong>of</strong> two planar robots based on geometric model<strong>in</strong>g”, Journal <strong>of</strong><br />
Information Science and Eng<strong>in</strong>eer<strong>in</strong>g, vol. 15, pp. 131–152, 1999.<br />
[21] B. Sharma, J. Vanualailai, and A. Chandra, “Dynamic trajectory<br />
plann<strong>in</strong>g <strong>of</strong> a standard trailer system”, Far East Journal <strong>of</strong> Applied<br />
Mathematics, vol. 28, no. 3, pp. 465–486, 2007.