MyGEOID dilemma - Coordinates
MyGEOID dilemma - Coordinates
MyGEOID dilemma - Coordinates

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
INS/GPS INTEGRATION<br />
An Alternative Low Cost MEMS<br />
IMU/GPS Integration Scheme<br />
The article investigates the use of artifi cial neural networks for developing an alternative integration scheme of<br />
low cost Microelectromechanical System (MEMS) Inertial Navigation System (INS) and Global Positioning System<br />
(GPS) for vehicular navigation applications. We are presenting here the fi rst part of the article. The second<br />
part that focuses on The Conceptual Intelligent Navigator will be published in October issue of <strong>Coordinates</strong><br />
DR. KAI-WEI CHIANG AND DR. NASER EL-SHEIMY<br />
This article investigates the use<br />
of artifi cial neural networks<br />
for developing an alternative<br />
integration scheme of low<br />
cost Microelectromechanical System<br />
(MEMS) Inertial Navigation System<br />
(INS) and Global Positioning System<br />
(GPS) for vehicular navigation<br />
applications. The primary objective<br />
is to overcome the limitations<br />
of current INS/GPS integration<br />
scheme and improve the positioning<br />
accuracy during GPS signal<br />
blockages. The results presented<br />
in this article indicated that the<br />
proposed technique was able to<br />
provide 47% and 78% improvement<br />
in terms of positioning accuracy<br />
during GPS signal blockages.<br />
Introduction<br />
With the evolution of modern<br />
computer technology in hardware<br />
and software, the fi eld of artifi cial<br />
intelligence has been receiving more<br />
attention in the development of new<br />
generation technology. Artifi cial<br />
intelligence (AI), also known as<br />
machine intelligence, is defi ned as<br />
the intelligence exhibited by anything<br />
manufactured (i.e. artifi cial) by<br />
humans or other sentient beings or<br />
systems (should such things ever<br />
exist on Earth or elsewhere) [Cawsey,<br />
1999]. It is usually hypothetically<br />
applied to general-purpose computers.<br />
The term is also used to refer to the<br />
fi eld of scientifi c investigation into<br />
the plausibility of and approaches<br />
to creating such systems.<br />
Artifi cial intelligence has been verifi ed<br />
as a successful and effective tool<br />
for providing solutions to certain<br />
engineering and science problems<br />
that can not be solved properly using<br />
conventional techniques [Cawsey,<br />
1998]. The goal of applying artifi cial<br />
intelligent technologies is to provide<br />
intelligence and robustness in the<br />
complex and uncertain systems similar<br />
to those seen in natural biological<br />
species [Honavar and Uhr, 1994].<br />
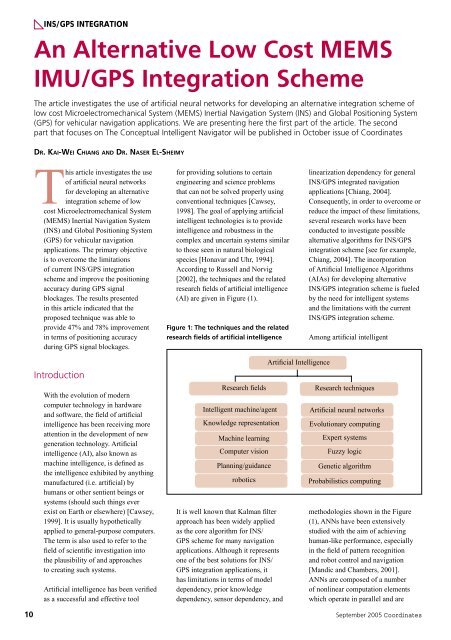
According to Russell and Norvig<br />
[2002], the techniques and the related<br />
research fi elds of artifi cial intelligence<br />
(AI) are given in Figure (1).<br />
Figure 1: The techniques and the related<br />
research fi elds of artifi cial intelligence<br />
It is well known that Kalman fi lter<br />
approach has been widely applied<br />
as the core algorithm for INS/<br />
GPS scheme for many navigation<br />
applications. Although it represents<br />
one of the best solutions for INS/<br />
GPS integration applications, it<br />
has limitations in terms of model<br />
dependency, prior knowledge<br />
dependency, sensor dependency, and<br />
linearization dependency for general<br />
INS/GPS integrated navigation<br />
applications [Chiang, 2004].<br />
Consequently, in order to overcome or<br />
reduce the impact of these limitations,<br />
several research works have been<br />
conducted to investigate possible<br />
alternative algorithms for INS/GPS<br />
integration scheme [see for example,<br />
Chiang, 2004]. The incorporation<br />
of Artifi cial Intelligence Algorithms<br />
(AIAs) for developing alternative<br />
INS/GPS integration scheme is fueled<br />
by the need for intelligent systems<br />
and the limitations with the current<br />
INS/GPS integration scheme.<br />
Among artifi cial intelligent<br />
methodologies shown in the Figure<br />
(1), ANNs have been extensively<br />
studied with the aim of achieving<br />
human-like performance, especially<br />
in the fi eld of pattern recognition<br />
and robot control and navigation<br />
[Mandic and Chambers, 2001].<br />
ANNs are composed of a number<br />
of nonlinear computation elements<br />
which operate in parallel and are<br />
10 September 2005 <strong>Coordinates</strong>