

Outline Proposal - Oxford Brookes University
Outline Proposal - Oxford Brookes University
Outline Proposal - Oxford Brookes University

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Request 69009 Page 4 of 11<br />
Figure 2: BoF methods build histograms of frequencies of local video features: as any<br />
spatiotemporal relationship is lost, meaningless videos with almost the same histograms can be<br />
incorrectly recognized.<br />
Inspired by the successes of similar approaches in 2D object detection [20], we propose to<br />
represent human activities as spatio-temporal “objects” composed of distinct, coordinated<br />
“parts” (elementary actions).<br />
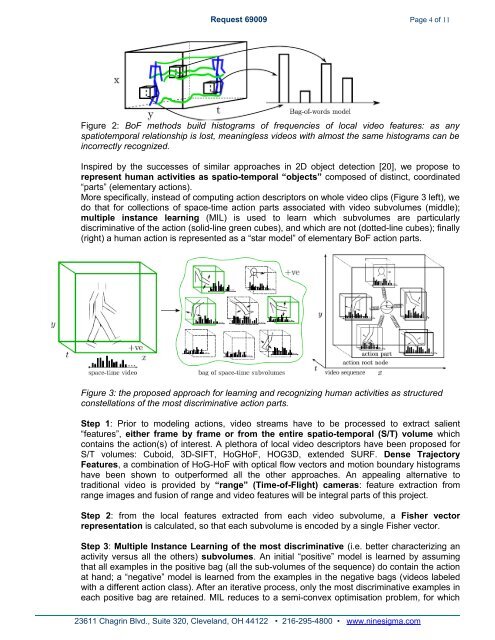
More specifically, instead of computing action descriptors on whole video clips (Figure 3 left), we<br />
do that for collections of space-time action parts associated with video subvolumes (middle);<br />
multiple instance learning (MIL) is used to learn which subvolumes are particularly<br />
discriminative of the action (solid-line green cubes), and which are not (dotted-line cubes); finally<br />
(right) a human action is represented as a “star model” of elementary BoF action parts.<br />
Figure 3: the proposed approach for learning and recognizing human activities as structured<br />
constellations of the most discriminative action parts.<br />
Step 1: Prior to modeling actions, video streams have to be processed to extract salient<br />
“features”, either frame by frame or from the entire spatio-temporal (S/T) volume which<br />
contains the action(s) of interest. A plethora of local video descriptors have been proposed for<br />
S/T volumes: Cuboid, 3D-SIFT, HoGHoF, HOG3D, extended SURF. Dense Trajectory<br />
Features, a combination of HoG-HoF with optical flow vectors and motion boundary histograms<br />
have been shown to outperformed all the other approaches. An appealing alternative to<br />
traditional video is provided by “range” (Time-of-Flight) cameras: feature extraction from<br />
range images and fusion of range and video features will be integral parts of this project.<br />
Step 2: from the local features extracted from each video subvolume, a Fisher vector<br />
representation is calculated, so that each subvolume is encoded by a single Fisher vector.<br />
Step 3: Multiple Instance Learning of the most discriminative (i.e. better characterizing an<br />
activity versus all the others) subvolumes. An initial “positive” model is learned by assuming<br />
that all examples in the positive bag (all the sub-volumes of the sequence) do contain the action<br />
at hand; a “negative” model is learned from the examples in the negative bags (videos labeled<br />
with a different action class). After an iterative process, only the most discriminative examples in<br />
each positive bag are retained. MIL reduces to a semi-convex optimisation problem, for which<br />
23611 Chagrin Blvd., Suite 320, Cleveland, OH 44122 • 216-295-4800 • www.ninesigma.com













