Mellin convolution for signal filtering and its application to the ...
Mellin convolution for signal filtering and its application to the ...
Mellin convolution for signal filtering and its application to the ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Proceedings of <strong>the</strong> ASME 2011 International Design Engineering Technical Conferences &<br />
Computers <strong>and</strong> In<strong>for</strong>mation in Engineering Conference<br />
IDETC/CIE 2011<br />
August 28-31, 2011, Washing<strong>to</strong>n DC, USA<br />
DETC2011/MESA-47392<br />
MELLIN CONVOLUTION FOR SIGNAL FILTERING<br />
AND ITS APPLICATION TO THE GAUSSIANIZATION OF LÉVY NOISE<br />
Gianni Pagnini<br />
CRS4<br />
Polaris Bldg. 1<br />
Pula (CA), 09010<br />
ITALY<br />
Email: pagnini@crs4.it<br />
ABSTRACT<br />
Noises are usually assumed <strong>to</strong> be Gaussian so that many<br />
existing <strong>signal</strong> processing techniques can be applied with no<br />
worry. However, in many real world natural or man-made systems,<br />
noises are usually heavy-tailed. It is increasingly desirable<br />
<strong>to</strong> address <strong>the</strong> problem of finding an opportune filter function <strong>for</strong><br />
a given input noise in order <strong>to</strong> generate a desired output noise.<br />
By <strong>filtering</strong> <strong>the</strong>ory, <strong>the</strong> probability density function of <strong>the</strong> output<br />
noise can be expressed by <strong>the</strong> integral of <strong>the</strong> product of <strong>the</strong> density<br />
of <strong>the</strong> input noise <strong>and</strong> <strong>the</strong> filter function. Adopting <strong>Mellin</strong><br />
trans<strong>for</strong>mation rules, <strong>the</strong> <strong>Mellin</strong> trans<strong>for</strong>m of <strong>the</strong> unknown filter<br />
is determined by <strong>the</strong> <strong>Mellin</strong> trans<strong>for</strong>ms of <strong>the</strong> known density<br />
of <strong>the</strong> input noise <strong>and</strong> <strong>the</strong> desired density <strong>for</strong> <strong>the</strong> output noise.<br />
Finally, after <strong>the</strong> inversion, <strong>the</strong> <strong>Mellin</strong>–Barnes integral representation<br />
of <strong>the</strong> filter function is derived. The method is applied <strong>to</strong><br />
compute <strong>the</strong> filter function <strong>to</strong> convert a Lévy noise in<strong>to</strong> a Gaussian<br />
noise.<br />
INTRODUCTION<br />
In many real world natural or man-made systems, noises are<br />
usually heavy-tailed [1] with lots of spikes <strong>and</strong> <strong>for</strong> this <strong>the</strong>y are<br />
difficult <strong>to</strong> be managed <strong>and</strong> should be fur<strong>the</strong>r processed [2]. For<br />
example, <strong>the</strong> networked induced delays in networked control systems<br />
(NCS) are of spiky nature which hints that <strong>the</strong> generating<br />
∗ Address all correspondence <strong>to</strong> this author.<br />
YangQuan Chen ∗<br />
Center <strong>for</strong> Self-Organizing <strong>and</strong> Intelligent Systems (CSOIS)<br />
Department of Electrical <strong>and</strong> Computer Engineering<br />
Utah State University<br />
4120 Old Main Hill, Logan, UT 84322-4120, USA<br />
Email: yqchen@ieee.org<br />
dynamics should be characterized by fractional order differential<br />
models as pointed out in [3] based on [4]. There<strong>for</strong>e, in fractional<br />
order control [5] <strong>and</strong> fractional order <strong>signal</strong> processing [1], it is<br />
increasingly desirable <strong>to</strong> address <strong>the</strong> problem of finding an opportune<br />
filter function <strong>for</strong> an input noise of a given distribution<br />
in order <strong>to</strong> generate an output noise of <strong>the</strong> desired distribution.<br />
In this contribution, noises with continuos probability density<br />
function (PDF) are taken in<strong>to</strong> account. The <strong>Mellin</strong> trans<strong>for</strong>m<br />
<strong>to</strong>ol is considered <strong>and</strong> in particular <strong>its</strong> <strong>convolution</strong>-type integral,<br />
where as <strong>convolution</strong> integral is intended that integral including<br />
<strong>the</strong> product of two functions whose trans<strong>for</strong>m is <strong>the</strong> product of<br />
<strong>the</strong> corresponding trans<strong>for</strong>med functions. By <strong>filtering</strong> <strong>the</strong>ory, <strong>the</strong><br />
PDF of <strong>the</strong> output noise can be expressed by <strong>the</strong> integral of <strong>the</strong><br />
product of <strong>the</strong> density of <strong>the</strong> input noise <strong>and</strong> <strong>the</strong> filter function.<br />
Adopting <strong>Mellin</strong> trans<strong>for</strong>mation rules, <strong>the</strong> <strong>Mellin</strong> trans<strong>for</strong>m of<br />
<strong>the</strong> unknown filter can be determined by <strong>the</strong> <strong>Mellin</strong> trans<strong>for</strong>ms<br />
of <strong>the</strong> known density of <strong>the</strong> input noise <strong>and</strong> <strong>the</strong> desired density<br />
<strong>for</strong> <strong>the</strong> output noise. Finally, after <strong>the</strong> inversion, <strong>the</strong> <strong>Mellin</strong>–<br />
Barnes integral representation of <strong>the</strong> filter function is derived.<br />
The method is applied <strong>to</strong> compute <strong>the</strong> filter function <strong>to</strong> convert a<br />
Lévy noise in<strong>to</strong> a Gaussian noise.<br />
MELLIN CONVOLUTION FOR SIGNAL FILTERING<br />
<strong>Mellin</strong> trans<strong>for</strong>m is a powerful ma<strong>the</strong>matical <strong>to</strong>ol that better<br />
than o<strong>the</strong>r methods perm<strong>its</strong> <strong>to</strong> successfully evaluate integrals [6–<br />
1 Copyright c○ 2011 by ASME
8], derive subordination <strong>for</strong>mula [9, 10], naturally related <strong>to</strong> <strong>the</strong><br />
<strong>Mellin</strong>–Barnes integral representation of Special Functions [6,<br />
11, 12] <strong>and</strong> <strong>the</strong>n also <strong>to</strong> manage higher transcendental functions<br />
<strong>and</strong> <strong>the</strong> well-known H-function [13–15], see Appendix.<br />
The <strong>Mellin</strong> trans<strong>for</strong>m of a function ψ(x), <strong>for</strong> x > 0, is defined<br />
as<br />
ψ ∗ ∞<br />
(s) = ψ(x)x<br />
0<br />
s−1 dx, s ∈ C, (1)<br />
<strong>and</strong> <strong>the</strong> antitrans<strong>for</strong>mation <strong>for</strong>mula reads<br />
ψ(x) = 1<br />
σ+i∞<br />
ψ<br />
2πi σ−i∞<br />
∗ (s)x −s ds, σ = Re(s). (2)<br />
The trans<strong>for</strong>med function ψ ∗ (s) exists if <strong>the</strong> integral<br />
∞<br />
0<br />
|ψ(x)|x s−1 dx is bounded <strong>and</strong> this constraint is met in<br />
<strong>the</strong> vertical strip a < σ = Re(s) < b, where <strong>the</strong> boundary values<br />
a <strong>and</strong> b follow from <strong>the</strong> analytic structure of ψ(x) provided that<br />
|ψ(x)| ≤ Mx −a when x → 0 + <strong>and</strong> |ψ(x)| ≤ Mx −b when x → +∞.<br />
Hereinafter, <strong>the</strong> <strong>Mellin</strong> trans<strong>for</strong>mation pair is denoted by<br />
ψ(x) M ←→ ψ ∗ (s). (3)<br />
Please see specialized treatises <strong>and</strong>/or h<strong>and</strong>books [6,11] <strong>for</strong> more<br />
details.<br />
Applying residue <strong>the</strong>orem <strong>to</strong> (2), <strong>the</strong> original function ψ(x)<br />
has <strong>the</strong> following series representation<br />
ψ(x) =<br />
n<br />
∑<br />
k=1<br />
s=ξk Res {ψ ∗ (s)} x −ξk , (4)<br />
where Res st<strong>and</strong>s <strong>for</strong> residue <strong>and</strong> ξk, with k = 1,...,n, are <strong>the</strong> n<br />
poles of <strong>the</strong> trans<strong>for</strong>med function ψ ∗ (s). This means that antitrans<strong>for</strong>mation<br />
<strong>for</strong>mula (2) can be re-written as<br />
ψ(x) = 1<br />
<br />
ψ<br />
2πi L<br />
∗ (s)x −s ds, (5)<br />
where L is <strong>the</strong> integration path that encircles all <strong>the</strong> poles ξk of<br />
<strong>the</strong> integr<strong>and</strong> ψ ∗ (s).<br />
Here, it is called <strong>convolution</strong> that opera<strong>to</strong>r involving two<br />
functions whose tras<strong>for</strong>mation is given by <strong>the</strong> product of <strong>the</strong><br />
trans<strong>for</strong>mation of two involved functions. What concerns <strong>Mellin</strong><br />
trans<strong>for</strong>m <strong>the</strong> <strong>convolution</strong> is<br />
ψ(x) =<br />
∞<br />
ψ1<br />
0<br />
<br />
x<br />
ψ2(η)<br />
η<br />
dη<br />
η<br />
M<br />
←→ ψ ∗ 1 (s)ψ∗ 2 (s). (6)<br />
Let pi(x,t) <strong>and</strong> po(x,t) be <strong>the</strong> PDF of <strong>the</strong> input <strong>and</strong> output<br />
noise, respectively, where x ∈ R is <strong>the</strong> r<strong>and</strong>om fluctuation of <strong>the</strong><br />
noisy <strong>signal</strong> <strong>and</strong> t ∈ R + is an associated positive parameter as <strong>for</strong><br />
example <strong>the</strong> elapsed time. Then a general input noise pi can be<br />
trans<strong>for</strong>med in<strong>to</strong> po by an opportune <strong>filtering</strong> function f through<br />
<strong>the</strong> subordination type <strong>for</strong>mula<br />
∞<br />
po(x,t) =<br />
0<br />
pi(x,τ) f(τ,t)dτ . (7)<br />
If <strong>the</strong> statistical self-similarity <strong>for</strong> both input <strong>and</strong> output <strong>signal</strong>s<br />
is assumed, <strong>the</strong>n, <strong>for</strong> <strong>the</strong> opportune choice of a scaling fac<strong>to</strong>r depending<br />
on t, <strong>the</strong> statistical description of <strong>the</strong> <strong>signal</strong>s emerges <strong>to</strong><br />
be scale invariant. Then, since <strong>the</strong> whole statistical in<strong>for</strong>mation is<br />
included inside <strong>the</strong> PDF, it means that <strong>the</strong> PDFs of <strong>the</strong> input <strong>and</strong><br />
output <strong>signal</strong>s can be expressed in <strong>the</strong> following scale invariant<br />
arrangement<br />
pi(x,τ) = τ −γi ϕi<br />
po(x,t) = t −γo ϕo<br />
x<br />
τ γi<br />
x<br />
t γo<br />
<br />
, (8)<br />
<br />
, (9)<br />
where τ γi <strong>and</strong> ϕi(x/τ γi) embodied <strong>the</strong> scale fac<strong>to</strong>r <strong>and</strong> <strong>the</strong> scale<br />
invariant functional <strong>for</strong>m of pi(x,τ), τ γi <strong>and</strong> ϕo(x/τ γo ) have <strong>the</strong><br />
same meaning <strong>for</strong> po(x,t). Finally, <strong>for</strong>mula (7) becomes<br />
t −γo ϕo<br />
x<br />
t γo<br />
∞<br />
= τ<br />
0<br />
−γi<br />
<br />
x<br />
ϕi<br />
τγi <br />
f(τ,t)dτ . (10)<br />
Formula (10) can be unders<strong>to</strong>od as a <strong>convolution</strong> integral (6)<br />
after straight<strong>for</strong>ward change of variable.<br />
Consider <strong>the</strong> positive semi-axes x > 0. Applying <strong>Mellin</strong><br />
trans<strong>for</strong>m (1) <strong>to</strong> both sides of (10) gives<br />
t −γo<br />
∞<br />
ϕo<br />
0<br />
<br />
x<br />
tγo <br />
x s−1 dx =<br />
∞<br />
τ<br />
0<br />
−γi<br />
∞<br />
ϕi<br />
0<br />
from which it follows that<br />
∞<br />
0<br />
x<br />
τ γi<br />
<br />
x s−1 <br />
dx f(τ,t)dτ , (11)<br />
f(τ,t)τ γi(s−1) γo(s−1)<br />
dτ = t ϕ∗ o (s)<br />
ϕ∗ , (12)<br />
i (s)<br />
where ϕ ∗ i (s) <strong>and</strong> ϕ∗ o(s) are <strong>the</strong> <strong>Mellin</strong> trans<strong>for</strong>m of ϕi <strong>and</strong> ϕo,<br />
respectively. Antitrans<strong>for</strong>mation of (12) by using (5) gives<br />
f(τ,t) = γi<br />
τ<br />
<br />
1<br />
2πi L<br />
ϕ ∗ o(s)<br />
ϕ ∗ i (s)<br />
γi −s+1<br />
τ<br />
t γo<br />
ds, (13)<br />
2 Copyright c○ 2011 by ASME
Formula (13) can be analogously written as<br />
f(τ,t) = γi τ<br />
τ<br />
γi<br />
tγo = γi<br />
τ<br />
<br />
1<br />
2πi<br />
<br />
1<br />
2πi<br />
L<br />
L<br />
ϕ ∗ o(s)<br />
ϕ ∗ i (s)<br />
ϕ ∗ o(s+1)<br />
ϕ ∗ i (s+1)<br />
γi −s<br />
τ<br />
t γo<br />
γi −s<br />
τ<br />
t γo<br />
ds (14)<br />
ds, (15)<br />
where L is <strong>the</strong> proper integration path <strong>for</strong> each integral. Formula<br />
(13) emerges <strong>to</strong> be <strong>the</strong> desired filter function which trans<strong>for</strong>ms an<br />
input noise distributed as pi(x,t) in<strong>to</strong> an output noise distributed<br />
as po(x,t).<br />
GAUSSIANIZATION OF LÉVY NOISE<br />
The <strong>for</strong>malism discussed in <strong>the</strong> previous section can be used<br />
<strong>to</strong> calculate <strong>the</strong> filter that given an input Lévy noise outputs a<br />
Gaussian noise.<br />
This means that, with reference <strong>to</strong> (8), <strong>the</strong> input noise is<br />
γi = 1<br />
α , pi(x,τ) = τ −1/α <br />
x<br />
ϕi<br />
τ1/α <br />
, (16)<br />
where 0 < α ≤ 2 is <strong>the</strong> characteristic exponent, <strong>and</strong> <strong>the</strong> <strong>Mellin</strong><br />
trans<strong>for</strong>m [9, see <strong>for</strong>mula (5.1)]<br />
ϕ ∗ i (s) = 1<br />
α<br />
Γ(1/α − s/α)Γ(s)<br />
Γ(1 − ρ + ρs)Γ(ρ − ρs)<br />
, ρ = α − θ<br />
2α , (17)<br />
where θ is <strong>the</strong> skewness parameter |θ| ≤ min{α,2−α}. In order<br />
<strong>to</strong> highlight <strong>the</strong>se parameters, hereinafter Lévy density will be<br />
denoted by L θ α(x,t). It is well-known that <strong>the</strong> extension <strong>to</strong> x < 0<br />
is given by <strong>the</strong> exchange θ → −θ.<br />
Since it is desired a Gaussian output noise, po(x,t) is<br />
po(x,t) = G (x,t) = 1<br />
2 √ πt exp<br />
<br />
− x2<br />
<br />
, (18)<br />
4t<br />
so that with reference <strong>to</strong> (9)<br />
<strong>and</strong><br />
γo = 1<br />
<br />
x<br />
, ϕo<br />
2 t1/2 <br />
= 1<br />
2 √ π exp<br />
<br />
− 1<br />
4<br />
<br />
x<br />
t1/2 <br />
2<br />
, (19)<br />
ϕ ∗ 1 Γ(s)<br />
o (s) = . (20)<br />
2 Γ(1/2+s/2)<br />
Finally, inserting (17) <strong>and</strong> (20) in (13), <strong>the</strong> Gaussianization<br />
of <strong>the</strong> Lévy noise is obtained by <strong>the</strong> filter function<br />
f(τ,t) = 1<br />
2τ<br />
<br />
1<br />
2πi<br />
L<br />
<br />
Γ(1+ρs)Γ(−ρs)<br />
Γ(−s/α)Γ(1+s/2)<br />
τ1/α t1/2 −s ds. (21)<br />
The filter function emerges <strong>to</strong> be a self-similar function with <strong>the</strong><br />
following scaling law<br />
f(τ,t) = t α/2 <br />
τ<br />
F<br />
tα/2 <br />
. (22)<br />
Formula (21) is <strong>the</strong> <strong>Mellin</strong>–Barnes integral representation of <strong>the</strong><br />
Gaussianing filter function. The integration path L encircles <strong>the</strong><br />
poles of Γ(1+ρs). The filter f(τ,t) can be expressed in terms<br />
of H-function, see Appendix, <strong>and</strong> it turns out <strong>to</strong> be<br />
f(τ,t) = 1<br />
2τ H11<br />
<br />
τ<br />
22<br />
1/α<br />
t1/2 <br />
<br />
<br />
(1,ρ)(1,1/2)<br />
<br />
, (23)<br />
(1,ρ)(1,1/α)<br />
<strong>and</strong> <strong>the</strong>n <strong>the</strong> Gaussianizing <strong>for</strong>mula <strong>for</strong> a Lévy noise is<br />
or analogously<br />
∞<br />
G (x,t) = L<br />
0<br />
θ α(x,τ) f(τ,t)dτ , (24)<br />
G (x,t) = 1<br />
∞<br />
L<br />
2 0<br />
θ α (x,τ)H11<br />
<br />
τ<br />
22<br />
1/α<br />
t1/2 <br />
<br />
<br />
(1,ρ)(1,1/2)<br />
<br />
(1,ρ)(1,1/α)<br />
dτ<br />
. (25)<br />
τ<br />
With reference <strong>to</strong> <strong>the</strong> Appendix, <strong>the</strong> existence condition <strong>for</strong> (23)<br />
requires that<br />
μ = 1 1<br />
−<br />
α 2<br />
= 2 − α<br />
2α > 0,<br />
which holds <strong>for</strong> α ≤ 2, that means <strong>for</strong> all values of Lévy characteristic<br />
exponent α.<br />
In order <strong>to</strong> express <strong>the</strong> filter function (21) by a series, applying<br />
residue <strong>the</strong>orem <strong>to</strong> (21) gives<br />
f(τ,t) = 1<br />
τ<br />
∞<br />
∑<br />
k=0<br />
(−1) k<br />
k!<br />
<br />
Γ(k) τ<br />
Γ[k/(αρ)]Γ[−k/(2ρ)]<br />
1/α<br />
t1/2 k/ρ . (26)<br />
3 Copyright c○ 2011 by ASME
Using <strong>the</strong> Gamma function property Γ(1 − z)Γ(z) = π/sin(πz)<br />
<strong>for</strong> <strong>the</strong> term Γ[−k/(2ρ)], <strong>for</strong>mula (15) becomes<br />
f(τ,t) = −1<br />
πτ<br />
∞ (−1)<br />
∑<br />
k=0<br />
k<br />
k!<br />
<br />
Γ(k)Γ<br />
Γ<br />
1+ k<br />
2ρ<br />
<br />
k<br />
αρ<br />
<br />
sin<br />
<br />
π k<br />
<br />
2ρ<br />
<br />
τ1/α t1/2 k/ρ .<br />
(27)<br />
It is worth noting <strong>to</strong> remark that expression (27) is more convenient<br />
<strong>for</strong> numerical computation than (26). In fact, <strong>the</strong> parameter<br />
ρ can be a rational number or be truncated <strong>to</strong> a rational<br />
number by <strong>the</strong> computer CPU, <strong>the</strong>n <strong>the</strong>re exist such k∗<br />
<strong>for</strong> those k∗/(2ρ) ∈ N <strong>and</strong> <strong>the</strong>n Γ[−k∗/(2ρ)] → ∞ which creates<br />
problem <strong>for</strong> <strong>the</strong> numerical computation of series (26). This<br />
problem is avoided in (27) because <strong>for</strong> <strong>the</strong> same k∗ it results<br />
sin[πk∗/(2ρ)] = 0.<br />
As briefly discussed in <strong>the</strong> Appendix, <strong>the</strong> asymp<strong>to</strong>tic expansion<br />
of f(τ,t) <strong>for</strong> τ/t α/2 → ∞ is obtained by chosing an integration<br />
path in (21) that encircles all poles of Γ(−ρs). Then it<br />
results<br />
f(τ,t) = −1<br />
πτ<br />
∞ (−1)<br />
∑<br />
k=0<br />
k<br />
k!<br />
<br />
Γ(k)Γ<br />
Γ<br />
1+ k<br />
αρ<br />
<br />
k<br />
2ρ<br />
<br />
sin<br />
<br />
π k<br />
<br />
αρ<br />
<br />
τ1/α t1/2 −k/ρ .<br />
(28)<br />
Special Cases<br />
In <strong>the</strong> symmetric case θ = 0, such that ρ = 1/2, <strong>and</strong> <strong>the</strong>n<br />
applying residue <strong>the</strong>orem <strong>to</strong> (21) gives <strong>for</strong> τ/t α/2 → ∞<br />
f(τ,t) = −1 ∞ (−1)<br />
πτ ∑<br />
k=0<br />
k<br />
k! Γ<br />
<br />
1+ 2k<br />
<br />
sin π<br />
α<br />
2k<br />
τ<br />
α tα/2 −2k/α . (29)<br />
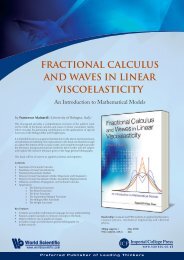
The plots of <strong>the</strong> filter function f(τ,t) <strong>and</strong> <strong>the</strong> Lévy <strong>and</strong> Gaussian<br />
PDFs <strong>for</strong> this symmetric case with θ = 0 are shown in FIG. 1 <strong>for</strong><br />
α = 0.8 <strong>and</strong> t = 1.<br />
A Lévy PDF with extremal value of <strong>the</strong> skewness parameter<br />
is called extremal. It is possible <strong>to</strong> prove that <strong>for</strong> 0 < α < 1 <strong>the</strong><br />
PDFs are one-sided on <strong>the</strong> positive semi-axes if θ = −α <strong>and</strong><br />
<strong>the</strong> negative semi-axes if θ = α. Since <strong>for</strong>mula (21) is valid <strong>for</strong><br />
x > 0 here it is considered <strong>the</strong> extremal PDF <strong>for</strong> θ = −α <strong>and</strong><br />
<strong>the</strong>n ρ = 1. In this case <strong>the</strong> filter function is<br />
f(τ,t) = −1<br />
πτ<br />
∞ (−1)<br />
∑<br />
k=0<br />
k<br />
k!<br />
<strong>and</strong> <strong>its</strong> asymp<strong>to</strong>tic expansion<br />
f(τ,t) = −1<br />
πτ<br />
∞ (−1)<br />
∑<br />
k=0<br />
k<br />
k!<br />
Γ(k)Γ 1+ k<br />
<br />
2<br />
Γ <br />
sin π<br />
k<br />
α<br />
k<br />
<br />
τ<br />
2 tα/2 k/α , (30)<br />
Γ(k)Γ 1+ k<br />
<br />
α<br />
Γ <br />
sin π k<br />
2<br />
k<br />
<br />
τ<br />
2 tα/2 −k/α . (31)<br />
100<br />
10<br />
1<br />
0.1<br />
0.01<br />
0.001<br />
0.0001<br />
filter<br />
Levy<br />
Gaussian<br />
1e-05<br />
0 5 10 15 20 25 30<br />
FIGURE 1. PLOTS OF THE REDUCED FUNCTIONS OF THE<br />
FILTER F(ξ f) (22), OF THE LÉVY PDF ϕi(ξL) (16) AND OF THE<br />
GAUSSIAN PDF ϕo(ξG) (19), WITH α = 0.8 AND θ = 0, WHERE<br />
THE ABSCISSA VALUES ARE ξ f = τ/t α/2 , ξL = x/τ 1/α AND ξG =<br />
x/t 1/2 .<br />
To conclude, when <strong>the</strong> input noise is Gaussian α = 2 <strong>and</strong><br />
θ = 0, <strong>the</strong>n (21) reduces <strong>to</strong><br />
f(τ,t) = 1<br />
τ<br />
<br />
1<br />
2πi<br />
In fact, <strong>the</strong> <strong>Mellin</strong> trans<strong>for</strong>m of δ(τ − t) is<br />
∞<br />
0<br />
L<br />
<br />
τ<br />
−s ds = δ(τ − t). (32)<br />
t<br />
δ(τ − t)τ s−1 dτ = t s−1 , (33)<br />
from which <strong>the</strong> inversion <strong>for</strong>mula turns out <strong>to</strong> be<br />
δ(τ − t) = 1<br />
<br />
2πi L<br />
= 1<br />
<br />
1<br />
τ 2πi<br />
t s−1 τ −s ds<br />
L<br />
<br />
τ<br />
−s ds. (34)<br />
t<br />
CONCLUSION<br />
The <strong>Mellin</strong> <strong>convolution</strong> integral is used <strong>to</strong> generally derive<br />
<strong>the</strong> filter function that convert an input noise which is difficult <strong>to</strong><br />
be managed in<strong>to</strong> a desirable output noise. This method is applied<br />
<strong>to</strong> modify a Lévy noise in<strong>to</strong> a Gaussian noise. The founded filter<br />
function is emerged <strong>to</strong> be an higher trascendental hypergeometric<br />
function <strong>and</strong> <strong>its</strong> representation as <strong>Mellin</strong>–Barnes integral is<br />
4 Copyright c○ 2011 by ASME
given, as well as <strong>the</strong> representation in terms of H-function. The<br />
asymp<strong>to</strong>tic expansion is computed.<br />
The special cases <strong>for</strong> symmetric <strong>and</strong> extremal Lévy densities<br />
are also shown with <strong>the</strong>ir asymp<strong>to</strong>tic expansions.<br />
The construction of a method which, analogously <strong>to</strong> that<br />
here presented, can be used <strong>to</strong> convert a general noise in<strong>to</strong> a desired<br />
noise, when <strong>the</strong>y follow discrete PDFs, will be <strong>the</strong> subject<br />
of <strong>the</strong> future development of <strong>the</strong> research.<br />
ACKNOWLEDGMENT<br />
GP would like <strong>to</strong> acknowledge Prof. F. Mainardi <strong>for</strong> continuos<br />
encouragement <strong>and</strong> useful suggestions.<br />
REFERENCES<br />
[1] Sheng, H., Chen, Y., <strong>and</strong> Qiu, T., 2010. Fractional Processes<br />
<strong>and</strong> Fractional Order Signal Processing – Techniques<br />
<strong>and</strong> Applications. Springer-Verlag, London.<br />
[2] Tafti, P. D., Van De Ville, D., <strong>and</strong> Unser, M., 2009. “Invariances,<br />
Laplacian-like wavelet bases, <strong>and</strong> <strong>the</strong> whitening of<br />
fractal processes”. IEEE Transactions on Image Processing,<br />
18(4), pp. 689 – 702.<br />
[3] Chen, Y. Q., 2010. “Fractional calculus, delay dynamics<br />
<strong>and</strong> networked control systems”. In Proceedings of <strong>the</strong><br />
3rd International Symposium on Resilient Control Systems,<br />
pp. 58–63.<br />
[4] Gorenflo, R., <strong>and</strong> Mainardi, F., 1998. “Fractional calculus<br />
<strong>and</strong> stable probability distributions”. Arch. Mech, 50,<br />
pp. 377–388.<br />
[5] Monje, C. A., Chen, Y., Vinagre, B., Xue, D., <strong>and</strong> Feliu,<br />
V., 2010. Fractional Order Systems <strong>and</strong> Controls - Fundamentals<br />
<strong>and</strong> Applications. Springer-Verlag, Advanced<br />
Industrial Control Series, London.<br />
[6] Marichev, O. I., 1983. H<strong>and</strong>book of Integral Trans<strong>for</strong>ms of<br />
Higher Transcendental Functions. Theory <strong>and</strong> Algorithmic<br />
Tables. Ellis Horwood, Chichester.<br />
[7] Adamchik, V. S., <strong>and</strong> Marichev, O. I., 1990. “The algorithm<br />
<strong>for</strong> calculating integrals of hypergeometric type functions<br />
<strong>and</strong> <strong>its</strong> realization in REDUCE system”. In In Proceedings<br />
of ISSAC’90 Conference. Tokyo, pp. 212–224.<br />
[8] Fikioris, G., 2006. “Integral evaluation using <strong>the</strong> <strong>Mellin</strong><br />
trans<strong>for</strong>m <strong>and</strong> generalized hypergeometric functions: Tu<strong>to</strong>rial<br />
<strong>and</strong> <strong>application</strong>s <strong>to</strong> antenna problems”. IEEE Trans.<br />
Antennas Propag., 54, pp. 3895—3907.<br />
[9] Mainardi, F., Pagnini, G., <strong>and</strong> Gorenflo, R., 2003. “<strong>Mellin</strong><br />
trans<strong>for</strong>m <strong>and</strong> subordination laws in fractional diffusion<br />
processes”. Fract. Calc. Appl. Anal., 6(4), pp. 441–459.<br />
[10] Mainardi, F., Pagnini, G., <strong>and</strong> Gorenflo, R., 2006. “<strong>Mellin</strong><br />
<strong>convolution</strong> <strong>for</strong> subordinated stable processes”. J. Math.<br />
Sci., 132(5), pp. 637–642.<br />
[11] Paris, R. B., <strong>and</strong> Kaminski, D., 2001. Asymp<strong>to</strong>tic <strong>and</strong><br />
<strong>Mellin</strong>-Barnes Integrals. Cambridge Univ. Press.<br />
[12] Mainardi, F., <strong>and</strong> Pagnini, G., 2003. “Salva<strong>to</strong>re Pincherle:<br />
<strong>the</strong> pioneer of <strong>the</strong> <strong>Mellin</strong>–Barnes integrals”. J. Comput.<br />
Appl. Math., 153(5), pp. 331–342.<br />
[13] Mathai, A. M., <strong>and</strong> Saxena, R. K., 1978. The H-Function<br />
with Applications in Statistics <strong>and</strong> O<strong>the</strong>r Disciplines. Wiley<br />
Eastern, New Delhi.<br />
[14] Srivastava, H. M., Gupta, K. C., <strong>and</strong> Goyal, S. P., 1982. The<br />
H-Functions of One <strong>and</strong> Two Variables with Applications.<br />
South Asian Publishers, New Delhi.<br />
[15] Mathai, A. M., Saxena, R. K., <strong>and</strong> Haubold, H. J., 2010.<br />
The H-Function. Theory <strong>and</strong> Applications. Springer.<br />
Appendix: H-function<br />
The H-function is defined by means of a <strong>Mellin</strong>–Barnes type<br />
integral as follows [13–15]<br />
H m,n<br />
<br />
<br />
p,q z<br />
(a1,A1),...,(ap,Ap)<br />
(b1,B1),...,(bq,Bq)<br />
with<br />
<br />
= 1<br />
<br />
h(s)z<br />
2πi L<br />
−s ds, (35)<br />
h(s) = ∏mj=1 Γ(b j + B js)∏ n i=1 Γ(1 − ai − Ais)<br />
∏ q<br />
j=m+1 Γ(1 − b j − B js)∏ p<br />
i=n+1 Γ(ai<br />
, (36)<br />
+ Ais)<br />
where an empty product is always interpreted as unity,<br />
{m, n, p, q} ∈ N0 with 1 ≤ m ≤ q <strong>and</strong> 0 ≤ n ≤ p, {Ai, B j} ∈ R +<br />
<strong>and</strong> {ai, b j} ∈ R, or C, with i = 1,..., p <strong>and</strong> j = 1,...q such<br />
that Ai(b j + k) = B j(ai − ℓ − 1) with k <strong>and</strong> ℓ ∈ N0, i = 1,...,n<br />
<strong>and</strong> j = 1,...,m. The poles of <strong>the</strong> integr<strong>and</strong> in (35) are assumed<br />
<strong>to</strong> be simple. The integration path L encircles all <strong>the</strong> poles of<br />
Γ(b j + B js) with j = 1,...,m.<br />
The H-function is an analytic function of z <strong>and</strong> exists <strong>for</strong> all<br />
z = 0 when q ≥ 1 <strong>and</strong> μ > 0 or <strong>for</strong> 0 < |z| < Δ when q ≥ 1 <strong>and</strong><br />
μ = 0 where<br />
μ =<br />
q<br />
∑<br />
j=1<br />
B j −<br />
p<br />
∑<br />
i=1<br />
Ai, Δ =<br />
<br />
p<br />
∏A i=1<br />
−Ai<br />
<br />
q<br />
i ∏ B<br />
j=1<br />
B <br />
j<br />
j .<br />
For o<strong>the</strong>r existence conditions see [13–15].<br />
The asymp<strong>to</strong>tic expansion <strong>for</strong> |z| → ∞ is obtained by integration<br />
around <strong>the</strong> poles of Γ(1 − ai − Ais) with i = 1,...,n. Actually<br />
this is similar <strong>to</strong> exchange s → −s <strong>and</strong> <strong>the</strong>n passing from<br />
<strong>the</strong> series of powers of z <strong>to</strong> a series of powers of 1/z, from which<br />
<strong>the</strong> asymp<strong>to</strong>tic expansion.<br />
5 Copyright c○ 2011 by ASME
In <strong>the</strong> particular case with n = 0 <strong>the</strong> asymp<strong>to</strong>tic behaviour is<br />
of exponential type <strong>and</strong> determined <strong>for</strong> real z by <strong>the</strong> <strong>for</strong>mula<br />
H m,0<br />
<br />
p,q (z) ≃ O z [Re(ω)+1/2]/μ<br />
<br />
exp μ cos<br />
<strong>for</strong> z → ∞ where<br />
ω =<br />
q<br />
∑<br />
j=1<br />
b j −<br />
p<br />
∑ ai +<br />
i=1<br />
p − q<br />
, ζ =<br />
2<br />
ζπ<br />
μ<br />
m<br />
∑<br />
j=1<br />
z<br />
Δ<br />
B j −<br />
1/μ <br />
, (37)<br />
p<br />
∑<br />
i=n+1<br />
A j .<br />
6 Copyright c○ 2011 by ASME