

Container Unloading using Robotized Palletizing
Container Unloading using Robotized Palletizing
Container Unloading using Robotized Palletizing

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Container</strong> <strong>Unloading</strong> <strong>using</strong> <strong>Robotized</strong> <strong>Palletizing</strong><br />
Theoretical Framework<br />
3.2.2 <strong>Palletizing</strong> PowerPac<br />
This section will describe the way of working with ABB RobotStudio’s add-in PzPP in order<br />
to create pallets with products as specified by the user. The purpose with the software is to<br />
create and simulate palletizing processes in an easy, quick and flexible way without the need<br />
of any robot programming skills. Rather than programming pick-and-place sequences,<br />
conveyors and gripping tools, the system is configured in a window based environment.<br />
Compared to traditional methods this will radically reduce programming time [18].<br />
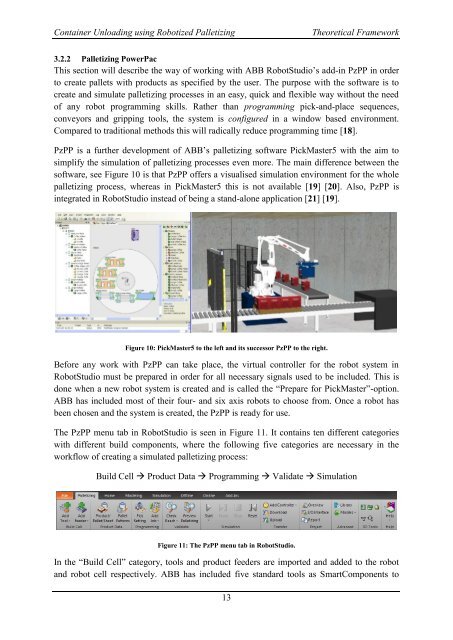
PzPP is a further development of ABB’s palletizing software PickMaster5 with the aim to<br />
simplify the simulation of palletizing processes even more. The main difference between the<br />
software, see Figure 10 is that PzPP offers a visualised simulation environment for the whole<br />
palletizing process, whereas in PickMaster5 this is not available [19] [20]. Also, PzPP is<br />
integrated in RobotStudio instead of being a stand-alone application [21] [19].<br />
Figure 10: PickMaster5 to the left and its successor PzPP to the right.<br />
Before any work with PzPP can take place, the virtual controller for the robot system in<br />
RobotStudio must be prepared in order for all necessary signals used to be included. This is<br />
done when a new robot system is created and is called the “Prepare for PickMaster”-option.<br />
ABB has included most of their four- and six axis robots to choose from. Once a robot has<br />
been chosen and the system is created, the PzPP is ready for use.<br />
The PzPP menu tab in RobotStudio is seen in Figure 11. It contains ten different categories<br />
with different build components, where the following five categories are necessary in the<br />
workflow of creating a simulated palletizing process:<br />
Build Cell Product Data Programming Validate Simulation<br />
Figure 11: The PzPP menu tab in RobotStudio.<br />
In the “Build Cell” category, tools and product feeders are imported and added to the robot<br />
and robot cell respectively. ABB has included five standard tools as SmartComponents to<br />
13













