the torque measurement based on various principles
the torque measurement based on various principles
the torque measurement based on various principles

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
22<br />
B. Skala<br />
We must set several value of loading, i.e. points of <str<strong>on</strong>g>torque</str<strong>on</strong>g> curve. When<br />
<str<strong>on</strong>g>the</str<strong>on</strong>g> slip is increasing, we must solve additi<strong>on</strong>al problems, like <str<strong>on</strong>g>the</str<strong>on</strong>g> over-current,<br />
<str<strong>on</strong>g>the</str<strong>on</strong>g>rmal stress, etc.<br />
Ano<str<strong>on</strong>g>the</str<strong>on</strong>g>r way is to derive <str<strong>on</strong>g>the</str<strong>on</strong>g> <str<strong>on</strong>g>torque</str<strong>on</strong>g> characteristic from <str<strong>on</strong>g>the</str<strong>on</strong>g> run-up<br />
characteristic. If <str<strong>on</strong>g>the</str<strong>on</strong>g> run-up of <str<strong>on</strong>g>the</str<strong>on</strong>g> machine is retarded, we can determine <str<strong>on</strong>g>the</str<strong>on</strong>g><br />
static <str<strong>on</strong>g>torque</str<strong>on</strong>g> curve instead of dynamic <str<strong>on</strong>g>torque</str<strong>on</strong>g> curve. Both <str<strong>on</strong>g>the</str<strong>on</strong>g>se characteristic<br />
could be very different. The retardati<strong>on</strong> can be made by lower voltage instead of<br />
<str<strong>on</strong>g>the</str<strong>on</strong>g> nominal voltage or additi<strong>on</strong>al moment of inertia <strong>on</strong> <str<strong>on</strong>g>the</str<strong>on</strong>g> shaft.<br />
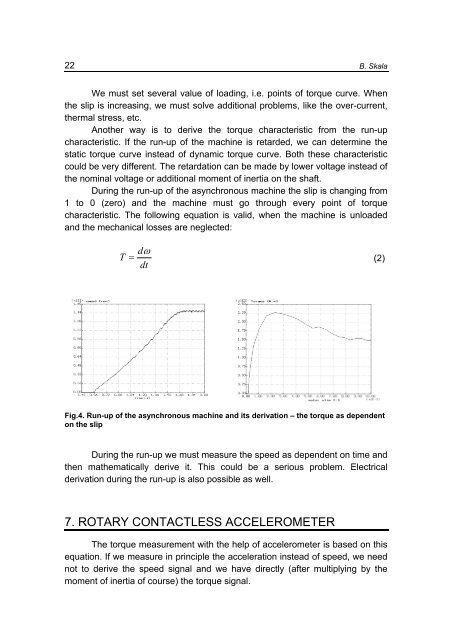
During <str<strong>on</strong>g>the</str<strong>on</strong>g> run-up of <str<strong>on</strong>g>the</str<strong>on</strong>g> asynchr<strong>on</strong>ous machine <str<strong>on</strong>g>the</str<strong>on</strong>g> slip is changing from<br />
1 to 0 (zero) and <str<strong>on</strong>g>the</str<strong>on</strong>g> machine must go through every point of <str<strong>on</strong>g>torque</str<strong>on</strong>g><br />
characteristic. The following equati<strong>on</strong> is valid, when <str<strong>on</strong>g>the</str<strong>on</strong>g> machine is unloaded<br />
and <str<strong>on</strong>g>the</str<strong>on</strong>g> mechanical losses are neglected:<br />
T<br />
dω<br />
= (2)<br />
dt<br />
Fig.4. Run-up of <str<strong>on</strong>g>the</str<strong>on</strong>g> asynchr<strong>on</strong>ous machine and its derivati<strong>on</strong> – <str<strong>on</strong>g>the</str<strong>on</strong>g> <str<strong>on</strong>g>torque</str<strong>on</strong>g> as dependent<br />
<strong>on</strong> <str<strong>on</strong>g>the</str<strong>on</strong>g> slip<br />
During <str<strong>on</strong>g>the</str<strong>on</strong>g> run-up we must measure <str<strong>on</strong>g>the</str<strong>on</strong>g> speed as dependent <strong>on</strong> time and<br />
<str<strong>on</strong>g>the</str<strong>on</strong>g>n ma<str<strong>on</strong>g>the</str<strong>on</strong>g>matically derive it. This could be a serious problem. Electrical<br />
derivati<strong>on</strong> during <str<strong>on</strong>g>the</str<strong>on</strong>g> run-up is also possible as well.<br />
7. ROTARY CONTACTLESS ACCELEROMETER<br />
The <str<strong>on</strong>g>torque</str<strong>on</strong>g> <str<strong>on</strong>g>measurement</str<strong>on</strong>g> with <str<strong>on</strong>g>the</str<strong>on</strong>g> help of accelerometer is <str<strong>on</strong>g>based</str<strong>on</strong>g> <strong>on</strong> this<br />
equati<strong>on</strong>. If we measure in principle <str<strong>on</strong>g>the</str<strong>on</strong>g> accelerati<strong>on</strong> instead of speed, we need<br />
not to derive <str<strong>on</strong>g>the</str<strong>on</strong>g> speed signal and we have directly (after multiplying by <str<strong>on</strong>g>the</str<strong>on</strong>g><br />
moment of inertia of course) <str<strong>on</strong>g>the</str<strong>on</strong>g> <str<strong>on</strong>g>torque</str<strong>on</strong>g> signal.