Sensorless Torque Estimation using Adaptive Kalman Filter and ...
Sensorless Torque Estimation using Adaptive Kalman Filter and ...
Sensorless Torque Estimation using Adaptive Kalman Filter and ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
plant model as its sub-model. In addition, we used a PID<br />
controller for the disturbance estimation. However, any kind<br />
of controller <strong>and</strong> control technique can be used which can<br />
make the estimator stable.<br />
<br />
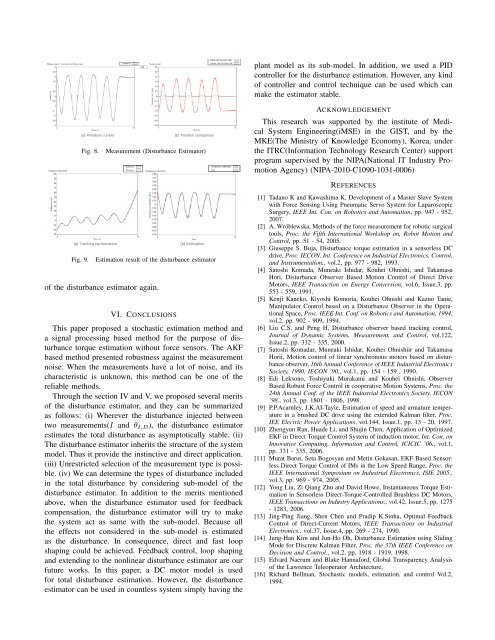
Fig. 8.<br />
<br />
Fig. 9.<br />
<br />
Measurement (Disturbance Estimator)<br />
<br />
<strong>Estimation</strong> result of the disturbance estimator<br />
of the disturbance estimator again.<br />
VI. CONCLUSIONS<br />
This paper proposed a stochastic estimation method <strong>and</strong><br />
a signal processing based method for the purpose of disturbance<br />
torque estimation without force sensors. The AKF<br />
based method presented robustness against the measurement<br />
noise. When the measurements have a lot of noise, <strong>and</strong> its<br />
characteristic is unknown, this method can be one of the<br />
reliable methods.<br />
Through the section IV <strong>and</strong> V, we proposed several merits<br />
of the disturbance estimator, <strong>and</strong> they can be summarized<br />
as follows: (i) Wherever the disturbance injected between<br />
two measurements(I <strong>and</strong> θ I,D ), the disturbance estimator<br />
estimates the total disturbance as asymptotically stable. (ii)<br />
The disturbance estimator inherits the structure of the system<br />
model. Thus it provide the instinctive <strong>and</strong> direct application.<br />
(iii) Unrestricted selection of the measurement type is possible.<br />
(iv) We can determine the types of disturbance included<br />
in the total disturbance by considering sub-model of the<br />
disturbance estimator. In addition to the merits mentioned<br />
above, when the disturbance estimator used for feedback<br />
compensation, the disturbance estimator will try to make<br />
the system act as same with the sub-model. Because all<br />
the effects not considered in the sub-model is estimated<br />
as the disturbance. In consequence, direct <strong>and</strong> fast loop<br />
shaping could be achieved. Feedback control, loop shaping<br />
<strong>and</strong> extending to the nonlinear disturbance estimator are our<br />
future works. In this paper, a DC motor model is used<br />
for total disturbance estimation. However, the disturbance<br />
estimator can be used in countless system simply having the<br />
ACKNOWLEDGEMENT<br />
This research was supported by the institute of Medical<br />
System Engineering(iMSE) in the GIST, <strong>and</strong> by the<br />
MKE(The Ministry of Knowledge Economy), Korea, under<br />
the ITRC(Information Technology Research Center) support<br />
program supervised by the NIPA(National IT Industry Promotion<br />
Agency) (NIPA-2010-C1090-1031-0006)<br />
REFERENCES<br />
[1] Tadano K <strong>and</strong> Kawashima K, Development of a Master Slave System<br />
with Force Sensing Using Pneumatic Servo System for Laparoscopic<br />
Surgery, IEEE Int. Con. on Robotics <strong>and</strong> Automation, pp. 947 - 952,<br />
2007.<br />
[2] A. Wróblewska, Methods of the force measurement for robotic surgical<br />
tools, Proc. the Fifth International Workshop on, Robot Motion <strong>and</strong><br />
Control, pp. 51 - 54, 2005.<br />
[3] Giuseppe S. Buja, Disturbance torque estimation in a sensorless DC<br />
drive, Proc. IECON. Int. Conference on Industrial Electronics, Control,<br />
<strong>and</strong> Instrumentation., vol.2, pp. 977 - 982, 1993.<br />
[4] Satoshi Komada, Muneaki Ishidar, Kouhei Ohnishi, <strong>and</strong> Takamasa<br />
Hori, Disturbance Observer Based Motion Control of Direct Drive<br />
Motors, IEEE Transaction on Energy Conversion, vol.6, Issue.3, pp.<br />
553 - 559, 1991.<br />
[5] Kenji Kaneko, Kiyoshi Komoria, Kouhei Ohnishi <strong>and</strong> Kazuo Tanie,<br />
Manipulator Control based on a Disturbance Observer in the Operational<br />
Space, Proc. IEEE Int. Conf. on Robotics <strong>and</strong> Automation, 1994,<br />
vol.2, pp. 902 - 909, 1994.<br />
[6] Liu C.S. <strong>and</strong> Peng H, Disturbance observer based tracking control,<br />
Journal of Dynamic Systems, Measurement, <strong>and</strong> Control, vol.122,<br />
Issue.2, pp. 332 - 335, 2000.<br />
[7] Satoshi Komadar, Muneaki Ishidar, Kouhei Ohnishiir <strong>and</strong> Takamasa<br />
Horii, Motion control of linear synchronous motors based on disturbance<br />
observer, 16th Annual Conference of IEEE Industrial Electronics<br />
Society, 1990. IECON ’90., vol.1, pp. 154 - 159 , 1990.<br />
[8] Edi Leksono, Toshiyuki Murakami <strong>and</strong> Kouhei Ohnishi, Observer<br />
Based Robust Force Control in cooperative Motion Systems, Proc. the<br />
24th Annual Conf. of the IEEE Industrial Electronics Society, IECON<br />
’98., vol.3, pp. 1801 - 1806, 1998.<br />
[9] P.P.AcarnIey, J.K.AI-Tayie, <strong>Estimation</strong> of speed <strong>and</strong> armature temperature<br />
in a brushed DC drive <strong>using</strong> the extended <strong>Kalman</strong> filter, Proc.<br />
IEE Electric Power Applications, vol.144, Issue.1, pp. 13 - 20, 1997.<br />
[10] Zhengyun Ran, Huade Li, <strong>and</strong> Shujin Chen, Application of Optimized<br />
EKF in Direct <strong>Torque</strong> Control System of induction motor, Int. Con. on<br />
Innovative Computing, Information <strong>and</strong> Control, ICICIC ’06., vol.1,<br />
pp. 331 - 335, 2006.<br />
[11] Murat Barut, Seta Bogosyan <strong>and</strong> Metin Gokasan, EKF Based <strong>Sensorless</strong><br />
Direct <strong>Torque</strong> Control of IMs in the Low Speed Range, Proc. the<br />
IEEE International Symposium on Industrial Electronics, ISIE 2005.,<br />
vol.3, pp. 969 - 974, 2005.<br />
[12] Yong Liu, Zi Qiang Zhu <strong>and</strong> David Howe, Instantaneous <strong>Torque</strong> <strong>Estimation</strong><br />
in <strong>Sensorless</strong> Direct-<strong>Torque</strong>-Controlled Brushless DC Motors,<br />
IEEE Transactions on Industry Applications., vol.42, Issue.5, pp. 1275<br />
- 1283, 2006.<br />
[13] Jing-Ping Jiang, Shen Chen <strong>and</strong> Pradip K.Sinha, Optimal Feedback<br />
Control of Direct-Current Motors, IEEE Transactions on Industrial<br />
Electronics., vol.37, Issue.4, pp. 269 - 274, 1990.<br />
[14] Jung-Han Kim <strong>and</strong> Jun-Ho Oh, Disturbance <strong>Estimation</strong> <strong>using</strong> Sliding<br />
Mode for Discrete <strong>Kalman</strong> <strong>Filter</strong>, Proc. the 37th IEEE Conference on<br />
Decision <strong>and</strong> Control., vol.2, pp. 1918 - 1919. 1998.<br />
[15] Edvard Naerum <strong>and</strong> Blake Hannaford, Global Transparency Analysis<br />
of the Lawrence Teleoperator Architecture,<br />
[16] Richard Bellman, Stochastic models, estimation. <strong>and</strong> control Vol.2,<br />
1994.