3 The Restricted Three-Body Problem
3 The Restricted Three-Body Problem
3 The Restricted Three-Body Problem

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 1<br />
3 <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong><br />
3.1 Introduction<br />
<br />
2 , <br />
, <br />
. 3 <br />
.<br />
3 <br />
, 2 <br />
, 3 <br />
, 3 (the circular, restricted, three-body<br />
problem) . ,2 <br />
, 3 , <br />
3 . <br />
3 <br />
, <br />
, , <br />
.<br />
<br />
. 3 , <br />
, <br />
. , Jacobi <br />
<br />
. 1 <br />
Hill<br />
<br />
, <br />
. <br />
3 <br />
.<br />
3.2 Equations of Motion<br />
<br />
, m 1 , m 2 2 <br />
<br />
. , 2 <br />
, <br />
.<br />
ξ, η, ζ , 2 <br />
(3.2). ξ ,<br />
t = 0 , m 1 m 2 <br />
, η ξ 2 <br />
<br />
. ζ ξ − η <br />
, 2 <br />
<br />
. (ξ 1 , η 1 , ζ 1 ), (ξ 2 , η 2 , ζ 2 ), <br />
, , <br />
. , µ = G(m 1 + m 2 ) = 1 <br />
. , m 1 > m 2 , <br />
¯µ =<br />
m 2<br />
m 1 + m 2<br />
, (3.1)<br />
<br />
, m 1 , m 2 <br />
µ 1 , µ 2 , <br />
.<br />
µ 1 = gm 1 = 1 − ¯µ and µ 2 = gm 2 = ¯µ. (3.2)<br />
2 <br />
. (inertial system) , sidereal system
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 2<br />
3.1: sidereal (ξ, η, ζ) synodic (x, y, z) . P , O 2<br />
, ζ, z <br />
. <br />
.<br />
<br />
(ξ, η, ζ) , <br />
.<br />
¨ξ = µ 1<br />
ξ 1 − ξ<br />
r 3 1<br />
¨η = µ 1<br />
η 1 − η<br />
r 3 1<br />
¨ζ = µ 1<br />
ζ 1 − ζ<br />
r 3 1<br />
+ µ 2<br />
ξ 2 − ξ<br />
r 3 2<br />
+ µ 2<br />
η 2 − η<br />
r 3 2<br />
+ µ 2<br />
ζ 2 − ζ<br />
r 3 2<br />
(3.3)<br />
(3.4)<br />
(3.5)<br />
, (3.2) <br />
r 2 1 = (ξ 1 − ξ) 2 + (η 1 − η) 2 + (ζ 1 − ζ) 2 , (3.6)<br />
r 2 2 = (ξ 2 − ξ) 2 + (η 2 − η) 2 + (ζ 2 − ζ) 2 , (3.7)<br />
. 2 <br />
, n <br />
. , <br />
2 <br />
. , <br />
, . , <br />
, t = 0 ξ, η, ζ , ζ <br />
n <br />
. x <br />
, m 1 , m 2 <br />
, (x 1 , y 1 , z 1 ) = (−µ 2 , 0, 0), (x 2 , y 2 , z 2 ) = (−µ 1 , 0, 0)<br />
. , (3.2), 3.2 <br />
r 2 1 = (x + µ 2 ) 2 + y 2 + z 2 , (3.8)<br />
r 2 2 = (x − µ 1 ) 2 + y 2 + z 2 . (3.9)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 3<br />
(x, y, z) <br />
, synodic system . <br />
<br />
.<br />
⎛ ⎞ ⎛<br />
⎞ ⎛ ⎞<br />
ξ cos nt − sin nt 0 x<br />
⎜ ⎟ ⎜<br />
⎟ ⎜ ⎟<br />
⎝ η ⎠ = ⎝ sin nt cos nt 0 ⎠ ⎝ y ⎠ . (3.10)<br />
ζ 0 0 1 z<br />
<br />
n = 1 , n <br />
. (3.16)(3.18) <br />
<br />
.<br />
(3.10) 2 <br />
2 .<br />
⎛ ⎞ ⎛<br />
⎞ ⎛ ⎞<br />
˙ξ cos nt − sin nt 0 ẋ − ny<br />
⎜ ⎟ ⎜<br />
⎟ ⎜ ⎟<br />
⎝ ˙η ⎠ = ⎝ sin nt cos nt 0 ⎠ ⎝ ẏ + nx ⎠ . (3.11)<br />
˙ζ 0 0 1 ż<br />
⎛<br />
⎜<br />
⎝<br />
¨ξ<br />
¨η<br />
¨ζ<br />
⎞<br />
⎟<br />
⎠ =<br />
⎛<br />
⎜<br />
⎝<br />
cos nt − sin nt 0<br />
sin nt cos nt 0<br />
0 0 1<br />
⎞ ⎛<br />
⎟ ⎜<br />
⎠ ⎝<br />
ẍ − 2nẏ − n 2 x<br />
ÿ + 2nẋ − n 2 y<br />
¨z<br />
⎞<br />
⎟<br />
⎠ . (3.12)<br />
<br />
, Corioli (the Corioli’s acceleration, nx, ny)<br />
(the centrifugal acceleration, n 2 x, n 2 y) . <br />
, (3.3)<br />
(3.5) <br />
,<br />
(ẍ−2nẏ − n 2 x) cos nt − (ÿ + 2nẋ − n 2 y) sin nt =<br />
[<br />
] [ ]<br />
x 1 − x x 2 − x<br />
µ 1<br />
µ 1 + µ<br />
r1<br />
3 2 cos nt + + µ 2<br />
y sin nt,<br />
r2<br />
3 r1<br />
3 r2<br />
3<br />
(3.13)<br />
(ẍ−2nẏ − n 2 x) sin nt + (ÿ + 2nẋ − n 2 y) cos nt =<br />
[<br />
] [ ]<br />
x 1 − x x 2 − x<br />
µ 1<br />
µ 1 + µ<br />
r1<br />
3 2 sin nt + + µ 2<br />
(3.14)<br />
y cos nt,<br />
r2<br />
3 r1<br />
3 r2<br />
3<br />
[ ]<br />
µ 1<br />
¨z = − + µ 2<br />
z. (3.15)<br />
r1<br />
3 r2<br />
3<br />
(3.13) cos nt (3.14) − sin nt <br />
, (3.13) <br />
− sin nt (3.14) cos nt <br />
, <br />
, synodic
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 4<br />
<br />
.<br />
[<br />
]<br />
ẍ − 2nẏ − n 2 x = −<br />
ÿ + 2nẋ − n 2 y = −<br />
¨z = −<br />
[<br />
[<br />
x + µ 2 x − µ 1<br />
µ 1 + µ 2<br />
µ 1<br />
r1<br />
3<br />
µ 1<br />
r 3 1<br />
r 3 1<br />
+ µ 2<br />
r 3 2<br />
+ µ 2<br />
r 3 2<br />
]<br />
]<br />
r 3 2<br />
(3.16)<br />
y, (3.17)<br />
z. (3.18)<br />
<br />
U <br />
.<br />
U = U(x, y, z) <br />
.<br />
ẍ − 2nẏ = ∂U<br />
∂x , (3.19)<br />
ÿ + 2nẋ = ∂U<br />
∂y , (3.20)<br />
¨z = ∂U<br />
∂z , (3.21)<br />
U = n2<br />
2 (x2 + y 2 ) + µ 1<br />
r 1<br />
+ µ 2<br />
r 2<br />
. (3.22)<br />
(x 2 + y 2 ) <br />
, 1/r 1 , 1/r 2 <br />
. <br />
U ∗ = −U , <br />
.<br />
ẍ − 2nẏ = − ∂U ∗<br />
∂x , (3.23)<br />
ÿ + 2nẋ = − ∂U ∗<br />
∂y , (3.24)<br />
¨z = − ∂U ∗<br />
∂z . (3.25)<br />
, U <br />
. U <br />
<br />
, . <br />
.<br />
3.3 <strong>The</strong> Jacobi Integral<br />
(3.19) ẋ, (3.20) ẏ, (3.21) ż <br />
,<br />
ẋẍ + ẏÿ + ż¨z = ∂U<br />
∂x ẋ + ∂U<br />
∂y ẏ + ∂U<br />
∂z ż = dU<br />
dt . (3.26)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 5<br />
<br />
,<br />
ẋ 2 + ẏ 2 + ż 2 = 2U − C J (3.27)<br />
C J . ẋ 2 + ẏ 2 + ż 2 = v 2 ,<br />
(3.22) ,<br />
C J = n 2 (x 2 + y 2 ) + 2<br />
v 2 = 2U − C J (3.28)<br />
(<br />
µ1<br />
r 1<br />
+ µ 2<br />
r 2<br />
)<br />
− ẋ 2 − ẏ 2 − ż 2 (3.29)<br />
<br />
, 2U − v 2 = C J , <br />
. C J Jacobi (the Jacobi integral) . <br />
. <br />
3 <br />
. Jacobi<br />
<br />
3 <br />
.<br />
C J , 3.1 (ξ, η, ζ) <br />
. (3.10) ,<br />
⎛ ⎞ ⎛<br />
⎞ ⎛ ⎞<br />
x cos nt sin nt 0 ξ<br />
⎜ ⎟ ⎜<br />
⎟ ⎜ ⎟<br />
⎝ y ⎠ = ⎝ − sin nt cos nt 0 ⎠ ⎝ η ⎠ , (3.30)<br />
z<br />
0 0 1 ζ<br />
⎛<br />
⎜<br />
⎝<br />
. ,<br />
⎛<br />
ẋ − nẏ<br />
⎜<br />
⎝ ẏ + nẋ<br />
ż<br />
ẋ − nẏ<br />
ẏ + nẋ<br />
ż<br />
⎞<br />
⎟<br />
⎠ =<br />
⎞<br />
⎟<br />
⎠ =<br />
⎛<br />
⎜<br />
⎝<br />
ẋ<br />
ẏ<br />
ż<br />
⎛<br />
⎜<br />
⎝<br />
⎞<br />
cos nt sin nt 0<br />
− sin nt cos nt 0<br />
0 0 1<br />
⎛<br />
⎟ ⎜<br />
⎠ + n ⎝<br />
⎞ ⎛<br />
⎟ ⎜<br />
⎠ ⎝<br />
sin nt − cos nt 0<br />
cos nt sin nt 0<br />
0 0 1<br />
˙ξ<br />
˙η<br />
˙ζ<br />
⎞<br />
⎟<br />
⎠ , (3.31)<br />
⎞ ⎛<br />
⎟ ⎜<br />
⎠ ⎝<br />
ξ<br />
η<br />
ζ<br />
⎞<br />
⎟<br />
⎠ , (3.32)<br />
, ,<br />
⎛ ⎞ ⎛<br />
ẋ cos nt sin nt 0<br />
⎜ ⎟ ⎜<br />
⎝ ẏ ⎠ = ⎝ − sin nt cos nt 0<br />
ż<br />
0 0 1<br />
⎞ ⎛<br />
⎟ ⎜<br />
⎠ ⎝<br />
˙ξ<br />
˙η<br />
˙ζ<br />
⎞<br />
⎛<br />
⎟ ⎜<br />
⎠ − n ⎝<br />
sin nt − cos nt 0<br />
cos nt sin nt 0<br />
0 0 1<br />
⎞ ⎛<br />
⎟ ⎜<br />
⎠ ⎝<br />
ξ<br />
η<br />
ζ<br />
⎞<br />
⎟<br />
⎠ (3.33)<br />
<br />
⎛<br />
A =<br />
⎜<br />
⎝<br />
cos nt sin nt 0<br />
− sin nt cos nt 0<br />
0 0 1<br />
⎞<br />
⎟<br />
⎠ and B =<br />
⎛<br />
⎜<br />
⎝<br />
sin nt − cos nt 0<br />
cos nt sin nt 0<br />
0 0 1<br />
⎞<br />
⎟<br />
⎠ (3.34)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 6<br />
(3.33) ,<br />
⎛<br />
ẋ 2 + ẏ 2 + ż 2 ⎜<br />
= (ẋ ẏ ż) ⎝<br />
⎛<br />
= ( ˙ξ ˙η ˙ζ)A T ⎜<br />
A ⎝<br />
ẋ<br />
ẏ<br />
ż<br />
˙ξ<br />
˙η<br />
˙ζ<br />
⎞<br />
⎟<br />
⎠<br />
⎞<br />
− n(ξ η ζ)B T ⎜<br />
A ⎝<br />
⎟<br />
⎠ − n( ˙ξ ˙η ˙ζ)A T B<br />
⎛<br />
˙ξ<br />
˙η<br />
˙ζ<br />
⎞<br />
⎛<br />
⎜<br />
⎝<br />
ξ<br />
η<br />
ζ<br />
⎟<br />
⎠ + n 2 (ξ η ζ)B T B<br />
= ˙ξ 2 + ˙η 2 + ˙ζ 2 + n 2 ( ˙ξ 2 + ˙η 2 ) + 2n( ˙ξη − ˙ηξ).<br />
⎞<br />
⎟<br />
⎠<br />
⎛<br />
⎜<br />
⎝<br />
ξ<br />
η<br />
ζ<br />
⎞<br />
⎟<br />
⎠<br />
(3.35)<br />
A T , B T A, B <br />
. A, B<br />
, ,<br />
, <br />
. , <br />
,<br />
x 2 + y 2 + z 2 = ξ 2 + η 2 + ζ 2 (3.29) ,<br />
(<br />
µ1<br />
C J = 2 + µ )<br />
2<br />
+ 2n(ξ ˙η − η<br />
r 1 r ˙ξ) − ˙ξ 2 − ˙η 2 − ˙ζ 2 (3.36)<br />
2<br />
. <br />
.<br />
(<br />
1<br />
2 ( ˙ξ 2 + ˙η 2 + ˙ζ 2 µ1<br />
) − + µ )<br />
2<br />
= h · n − 1 r 1 r 2 2 C J (3.37)<br />
n = (0, 0, n) , <br />
. 2.9 , <br />
h <br />
, 3 <br />
.<br />
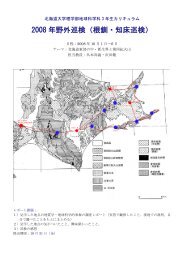
3.2: 2 Jacobi <br />
. k µ 2 = 0.2 . C J <br />
(a)C J = 3.9 , (b)C J = 3.7.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 7<br />
<br />
Jacobi <br />
. 2 , <br />
. , 3 , Jacobi <br />
.<br />
Jacobi <br />
, 0 <br />
. ,<br />
2U = C J (3.38)<br />
(<br />
n 2 (x 2 + y 2 µ1<br />
) + 2 + µ )<br />
2<br />
= C J (3.39)<br />
r 1 r 2<br />
<br />
, <br />
. x − y<br />
<br />
. <br />
. 3.3 µ 2 = 0.2, n = 1 . (3.27) Jacobi <br />
2U ≥ C J . (3.39)<br />
, <br />
. , 3 . (3.3) <br />
, .<br />
(3.3a) , , C J <br />
µ 1 <br />
<br />
, µ 2 , <br />
. (3.3b) , µ 1 <br />
<br />
, µ 2 <br />
. , <br />
. Hill (Hill’s stability) .<br />
3.4 Tisserand Relation<br />
a, e, I <br />
. , <br />
a ′ , e ′ , I ′ . 2 <br />
, Jacobi<br />
<br />
. Jacobi , C J = 2U −v 2 ,<br />
<br />
.3 <br />
, <br />
r = (ξ, η, ζ), r = ( ˙ξ, ˙η, ˙ζ) . <br />
(3.37) Jacobi <br />
.<br />
(<br />
1<br />
2 ( ˙ξ 2 + ˙η 2 + ˙ζ 2 µ1<br />
) − + µ )<br />
2<br />
= h · n − 1 r 1 r 2 2 C J (3.40)<br />
r 1 , r 2 , <br />
. , <br />
, <br />
. , <br />
.<br />
g(m Sun + m comet ) ≈ g(m Sun + m Jupitar ) = 1 (3.41)<br />
m Sun , m comet , m Jupitar , , , <br />
. - 2 <br />
(eq:2.34) 1 ,<br />
1 (2.34): v 2 = µ(2/r − 1/a)<br />
˙ξ 2 + ˙η 2 + ˙ζ 2 = 2 r − 1 a , (3.42)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 8<br />
µ = 1 , , <br />
r 1 ≈ r . <br />
.<br />
h = r × ṙ. (3.43)<br />
ζ <br />
ξ ˙η − η ˙ξ = h cos I. (3.44)<br />
, h 2 = a(1 − e 2 ) . (3.40) <br />
2<br />
r − 1 a − 2√ a(1 − e 2 ) cos I = 2 r − 2µ 2<br />
( 1<br />
r − 1 )<br />
− C J (3.45)<br />
r 2<br />
<br />
. , <br />
, 1/r 2 , µ 2 <br />
<br />
,<br />
1<br />
2a + √ a(1 − e 2 ) cos I ≈ constant. (3.46)<br />
, <br />
, <br />
.<br />
1<br />
2a + √ a(1 − e 2 ) cos I = 1<br />
2a + √ a ′ (1 − e ′2 ) cos I ′ (3.47)<br />
′<br />
Tisserand (Tesserand relation, Tesserand 1896) <br />
, <br />
, <br />
<br />
.<br />
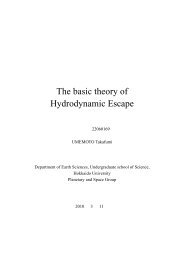
3.3: <br />
. .
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 9<br />
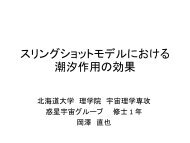
3.4: e Jup = 0, e Jup = 0.048 Tisserand . 35 .<br />
<br />
3.4 . , <br />
, <br />
8AU <br />
. <br />
a = 4.81AU,<br />
e = 0.763, I = 7 .47, <br />
a = 10.8AU, e = 0.731, I = 21 .4 .<br />
Tisserand <br />
Jacobi <br />
, 1<br />
<br />
. , + √ a(1 − e<br />
2a 2 ) cos I , 0 <br />
. 3.4 . <br />
0( ), <br />
0.048 Tisserand<br />
<br />
. <br />
, 1 , <br />
12 <br />
.<br />
3.4 <br />
, , , <br />
<br />
. 3 <br />
,<br />
<br />
. <br />
, <br />
. <br />
, <br />
. , <br />
.<br />
, <br />
, , , <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 10<br />
3.5 Lagrangian Equilibrium Points<br />
<br />
2 m 1 , m 2 <br />
n <br />
, <br />
n <br />
, 2 <br />
. , <br />
, P <br />
(equilibrium point) .<br />
a, b, c , m 1 , 2 , m 2 <br />
. <br />
P (3.5). , F 1 , F 2 P m 1 , m 2 <br />
<br />
. P <br />
, O<br />
<br />
b . P −b <br />
, <br />
.<br />
F = F 1 + F 2 . (3.48)<br />
P <br />
Coriolis <br />
.<br />
O <br />
.<br />
b = m 1a + m 2 c<br />
m 1 + m 2<br />
(3.49)<br />
<br />
,<br />
m 1 (a − b) = m 2 (b − c). (3.50)<br />
F 1 + F 2 <br />
,<br />
m 2 (F 1 × c) + m 1 (F 2 × a) = 0. (3.51)<br />
F 1 , c F 2 , a <br />
, ,<br />
m 2 F 1 c = m 1 F 2 a. (3.52)<br />
3.5: P , m 1 , m 2 . O m 1 , m 2
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 11<br />
<br />
, F 1 = gm 1 /a 2 , F 2 = gm 2 /c 2 <br />
(3.52) a = c <br />
. , 2 3 2 3 <br />
.<br />
P <br />
,<br />
n 2 b = F 1 cos β + F 2 cos γ. (3.53)<br />
β F 1 b , γ F 2 b <br />
(3.6). <br />
,<br />
n 2 =<br />
, O, P, 2 <br />
3 ,<br />
g<br />
a 2 b 2 (m 1b cos β + m 2 b cos γ). (3.54)<br />
b cos β = a − g cos α,<br />
b cos γ = a − (d − g) cos α,<br />
(3.55)<br />
.d m 1 , m 2 , g m 1 O <br />
. ,<br />
. <br />
,<br />
cos α = d<br />
2a , (3.56)<br />
g = m 2<br />
m 1 + m 2<br />
d, d − g =<br />
m 2<br />
m 1 + m 2<br />
d. (3.57)<br />
(3.54) <br />
n 2 = g(m (<br />
1 + m 2 )<br />
a 2 − m )<br />
1m 2<br />
a 3 b 2 (m 1 + m 2 ) 2 d2 . (3.58)<br />
3.6: P <br />
. m 1 , m 2 <br />
2 <br />
. <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 12<br />
<br />
. ,<br />
(3.57) ,<br />
b 2 = a 2 + g 2 − 2ag cos α = a 2 + g 2 − gd. (3.59)<br />
, (3.58) <br />
.<br />
b 2 = a 2 − m 1m 2<br />
(m 1 + m 2 ) 2 d2 . (3.60)<br />
n 2 = g(m 1 + m 2 )/a 3 . (3.61)<br />
, <br />
, Kepler 3 ,<br />
n 2 = g(m 1 + m 2 )/d 3 , (3.62)<br />
a = d .<br />
, m 1 , m 2 <br />
, m 1 , m 2 , <br />
<br />
. , <br />
<br />
. <br />
Lagrangian equilibrium point, L 4 , L 5 . , 3 L 1 , L 2 , L 3 , m 1 , m 2 <br />
.<br />
, <br />
, <br />
. <br />
, , <br />
.<br />
3.6 Location of Equilibrium Points<br />
3 <br />
, <br />
. , <br />
. <br />
. , <br />
x − y <br />
, , 2 <br />
, n = 1 .<br />
<br />
, Brower & Clemence (1961) . U <br />
<br />
. (3.8) 2 , (3.9) 3 r 1 , r 2 , µ 1 + µ 2 = 1 ,<br />
(3.22) 4 ,<br />
µ 1 r 2 1 + µ 2 r 2 2 = x 2 + y 2 + µ 1 µ 2 , (3.63)<br />
U = µ 1<br />
( 1<br />
r 1<br />
+ r2 1<br />
2<br />
2 (3.8): r 2 1 = (x + µ 2 ) 2 + y 2 + z 2<br />
3 (3.9): r 2 2 = (x − µ 1 ) 2 + y 2 + z 2<br />
4 (3.22): U = n2<br />
2 (x2 + y 2 ) + µ 1<br />
r 1<br />
+ µ 2<br />
r 2<br />
)<br />
( ) 1<br />
+ µ 2 + r2 2<br />
− 1 r 2 2 2 µ 1µ 2 . (3.64)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 13<br />
x, y <br />
, <br />
. , x, y , r 1 , r 2 <br />
.<br />
(3.19) 5 , (3.20) 6 , ẍ = ÿ = ẋ = ẏ = 0 <br />
. <br />
.<br />
∂U<br />
∂x = ∂U ∂r 1<br />
∂r 1 ∂x + ∂U ∂r 2<br />
= 0,<br />
∂r 2 ∂x<br />
(3.65)<br />
∂U<br />
= ∂U ∂r 1<br />
∂y ∂r 1 ∂y + ∂U ∂r 2<br />
= 0.<br />
∂r 2 ∂y<br />
(3.66)<br />
U (3.64) <br />
.<br />
µ 1<br />
(<br />
− 1 r 2 1<br />
+ r 1<br />
) x + µ2<br />
r 1<br />
+ µ 2<br />
(− 1 r 2 2<br />
µ 1<br />
(<br />
− 1 r 2 1<br />
+ r 1<br />
) y<br />
r 1<br />
+ µ 2<br />
(<br />
− 1 r 2 2<br />
+ r 2<br />
) x + µ1<br />
r 2<br />
= 0, (3.67)<br />
+ r 2<br />
) y<br />
r 2<br />
= 0. (3.68)<br />
(3.65), (3.65) ,<br />
∂U<br />
∂r 1<br />
= µ 1<br />
(− 1 r 2 1<br />
+ r 1<br />
)<br />
= 0,<br />
∂U<br />
∂r 2<br />
= µ 2<br />
(− 1 r 2 2<br />
+ r 2<br />
)<br />
= 0, (3.69)<br />
, r 1 = r 2 = 1 <br />
. ,<br />
r 2 1 = (x + µ 2 ) 2 + y 2 = 1, r 2 2 = (x − µ 1 ) 2 + y 2 = 1 (3.70)<br />
, 2 <br />
.<br />
x = 1 √<br />
3<br />
2 − µ 2, y = ±<br />
2 . (3.71)<br />
r 1 = r 2 = 1 , ,µ 1 , µ 2 <br />
, <br />
. <br />
(Lagrangian equilibrium point) , <br />
,L 4 , L 5 .<br />
(3.68) , y = 0 (3.68) <br />
. x <br />
, (3.65) <br />
. , <br />
(collinear Lagrangian equilibrium point) L 1 , L 2 , L 3 . L 1 µ 1 , µ 2 ,<br />
L 2 µ 2 , L 3 x <br />
. , <br />
, <br />
.<br />
L 1 ,<br />
r 1 + r 2 = 1, r 1 = x + µ 2 , r 2 = −x + µ 1 ,<br />
5 (3.19): ẍ − 2nẏ = ∂U<br />
∂x<br />
6 (3.20): ÿ + 2nẋ = ∂U<br />
∂y<br />
∂r 1<br />
∂x = −∂r 2<br />
∂x<br />
= 1. (3.72)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 14<br />
, (3.67) ,<br />
) (<br />
1<br />
µ 1<br />
(−<br />
(1 − r 2 ) + 1 − r 2 2 − µ 2 − 1 r2<br />
2<br />
+ r 2<br />
)<br />
= 0 (3.73)<br />
,<br />
µ 2<br />
= 3r 3 (1 − r 2 + r2/3)<br />
2<br />
2<br />
µ 1 (1 + r 2 + r2)(1 2 − r 2 ) , (3.74)<br />
3<br />
. <br />
,<br />
( ) 1/3 µ2<br />
α = , (3.75)<br />
3µ 1<br />
r 2 <br />
, r 2 = α <br />
. α Hill (µ 2 <br />
) <br />
. (3.74)<br />
<br />
,<br />
α = r 2 + 1 3 r2 2 + 1 3 r3 2 + 53<br />
81 r4 2 + O(r 5 2) (3.76)<br />
. 2.5 Lagrange’s inversion method <br />
, r 2 α <br />
<br />
. (3.76) (2.89) 7 <br />
,<br />
. φ <br />
.<br />
,<br />
r 2 = α + (−1/3)φ(r 2 ), (3.77)<br />
φ(r 2 ) = r 2 2 + r 3 2 + 53<br />
27 r4 2 + O(r 5 2). (3.78)<br />
[φ(α)] 2 = α 4 + 2α 5 + O(α 6 ), (3.79)<br />
d<br />
dα [φ(α)]2 = 4α 3 + 10α 4 + O(α 5 ), (3.80)<br />
d 2<br />
[φ(α)] 3 = α 6 + O(α 7 ), (3.81)<br />
dα 2 [φ(α)]3 = 30α 4 + O(α 5 ). (3.82)<br />
(2.90) 8 <br />
, r 2 <br />
.<br />
r 2 = α +<br />
∞∑ (−1/3) j d j−1<br />
[φ(α)]j<br />
j! dαj−1 j=1<br />
= α − 1 3 α2 − 1 9 α3 − 23<br />
81 α4 + O(α 5 ). (3.83)<br />
7 (2.89): ζ = z + eφ(ζ)(e < 1)<br />
8 (2.90): ζ = z + ∑ ∞<br />
j=1 ej d j−1<br />
j! dz<br />
[φ(z)] j .<br />
j−1
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 15<br />
L 2 ,<br />
r 1 − r 2 = 1, r 1 = x + µ 2 , r 2 = x − µ 1 , ∂r 1<br />
∂x = ∂r 2<br />
= 1.<br />
∂x<br />
(3.84)<br />
, (3.67) ,<br />
) (<br />
1<br />
µ 1<br />
(−<br />
(1 + r 2 ) + 1 + r 2 2 + µ 2 − 1 r2<br />
2 )<br />
+ r 2 = 0 (3.85)<br />
<br />
. α <br />
,<br />
.L 3 ,<br />
µ 2<br />
= 3r 3 (1 + r 2 + r2/3)<br />
2<br />
2<br />
µ 1 (1 + r 2 ) 2 (1 − r2) , (3.86)<br />
3<br />
α = r 2 − 1 3 r2 2 + 1 3 r3 2 + 1<br />
81 r4 2 + O(r2) 5 (3.87)<br />
r 2 = α + 1 3 α 2 − 1 9 α3 − 31<br />
81 α4 + O(α 5 ) (3.88)<br />
r 2 − r 1 = 1, r 1 = −x − µ 2 , r 2 = −x + µ 1 , ∂r 1<br />
∂x = ∂r 2<br />
∂x<br />
= −1. (3.89)<br />
, (3.67) r 2 ,<br />
(<br />
µ 1 − 1 )<br />
)<br />
1<br />
+ r<br />
r1<br />
2 1 + µ 2<br />
(−<br />
(1 + r 1 ) + 1 + r 2 1 = 0 (3.90)<br />
,r 1 = 1 + β ,<br />
µ 2<br />
= − 12<br />
µ 1 7 β + 144<br />
49 β2 − 1567<br />
β = − 7 12<br />
µ 2<br />
µ 1<br />
= (1 − r3 1)(1 + r 1 ) 2<br />
r 3 1(r 2 1 + 3r 1 + 3) . (3.91)<br />
(<br />
µ2<br />
µ 1<br />
)<br />
+ 7 12<br />
343 β3 + O(β 4 ), (3.92)<br />
( ) 2 µ2<br />
− 13223 ( ) 3 ( ) 4 µ2 µ2<br />
+ O<br />
(3.93)<br />
µ 1 20736 µ 1 µ 1<br />
3.7 , µ 2 = 0.2, 3 Jacobi <br />
, Lagrangian<br />
points . 3.8 , <br />
C J <br />
3 .<br />
3.7, 3.8 , L 1 Jacobi <br />
(C J = 3.805, µ 2 = 0.2), <br />
<br />
. 3.2 <br />
, L 1 , 2 <br />
<br />
. L 2 (C J = 3.552, µ 2 = 0.2) <br />
. C J < C L2 <br />
, <br />
,
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 16<br />
. <br />
L 3 (C J = 3.197, µ 2 = 0.2) .L 4 , L 5 (C J = 2.84, µ 2 = 0.2) <br />
C J . , Jacobi C J < C L4,5 , <br />
. <br />
. Jacobi<br />
<br />
.<br />
Lagrangian equilibrium point <br />
. <br />
L 5 . , <br />
Jacobi ,<br />
<br />
. x, y , <br />
r 1 , r 2 (3.39) 9 <br />
<br />
, Jacobi <br />
. O(µ 2 ) .<br />
C L1 ≈ 3 + 3 4/3 µ 2/3<br />
2 − 10µ 2 /3, (3.94)<br />
C L2 ≈ 3 + 3 4/3 µ 2/3<br />
2 − 14µ 2 /3, (3.95)<br />
C L3 ≈ 3 + µ 2 , (3.96)<br />
C L4 ≈ 3 − µ 2 , (3.97)<br />
C L5 ≈ 3 − µ 2 . (3.98)<br />
(3.8) 10 , (3.9) 11 , (3.39) , y −y <br />
. <br />
x <br />
. , L 4 , L 5 Jacobi <br />
.<br />
<br />
µ 2 = m 2 /(m 1 + m 2 ) , Pluto-Charon , <br />
∼ 10 −1 . - ∼ 10 −2 . , <br />
- , -<br />
µ 2 , <br />
. Lagrangian equilibrium<br />
point <br />
, µ 2 <br />
.<br />
(3.94), (3.95) , µ 2 → 0 C L1 → C L2 . (3.83), (3.88) ,<br />
µ 2 → 0 , O(α 2 ) <br />
. L 1 , L 2 µ 2 <br />
. L 3 1 + β <br />
. β < 0 (3.93) <br />
<br />
. µ 2 → 0 , L 3 <br />
. <br />
µ 1 <br />
, r = (1 − µ 2 + µ 2 2) 1/2 <br />
. µ 2 , µ 1 <br />
, µ 2 → 0 , µ 1 <br />
<br />
.<br />
3.6 µ 2 = 0.01( -<br />
) <br />
Lagrangian equilibrium<br />
point . L 1 , L 2 µ 2 , <br />
, L 3 <br />
. 3.9 <br />
µ 1 <br />
. 1% <br />
, <br />
.<br />
9 (3.39): n 2 (x 2 + y 2 ) + 2(µ 1 /r 1 + µ 2 /r 2 ) = C J<br />
10 (3.8): r 2 1 = (x + µ 2 ) 2 + y 2 + z 2<br />
11 (3.9): r 2 2 = (x − µ 1 ) 2 + y 2 + z 2
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 17<br />
3.7: Lagrangian equilibrium point ( ) µ 2 = 0.2 <br />
. <br />
, L 1 , L 2 , L 3 <br />
3 Jacobi (3.805,<br />
3.552, 3.197) <br />
. O 2 <br />
.<br />
3.8: C J = 2U <br />
3 , Lagrangian equilibrium point <br />
. L 1 , L 2 , L 3 , <br />
. <br />
C J <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 18<br />
3.9: Lagrangian equilibrium point ( ) µ 2 = 0.01 <br />
. <br />
.<br />
3.10: 5 Lagrangian equilibrium point <br />
. µ 2 log <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 19<br />
µ 2 → 0 <br />
, µ 2 = 10 −1<br />
µ 2 = 10 −10 <br />
(3.10). , L 3 , L 4 , L 5 , L 1 ,<br />
L 2 <br />
. <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 20<br />
3.7 Stability of Equilibrium Points<br />
, <br />
. <br />
, <br />
. <br />
, <br />
.<br />
<br />
, , <br />
. <br />
. <br />
, . , 2 <br />
, , <br />
, <br />
, , . <br />
. , 2<br />
<br />
. , , <br />
.<br />
<br />
. L 4 , L 5 , C J =<br />
2U − v 2 <br />
. U <br />
U ∗ (U ∗ = −U) , L 4 , L 5 C J <br />
. , <br />
, <br />
. 3.11 µ 2 = 0.1 2 <br />
. (3.16) 12 , (3.17) 13 <br />
(ẍ, ÿ)<br />
<br />
. <br />
, , <br />
.<br />
3.11 <br />
, L 4 C J <br />
3.11: 2 <br />
(C J = 2.95, C J = 3.09, µ 2 = 0.1) <br />
<br />
.<br />
12 (3.16): ẍ − 2nẏ − n 2 x = −[µ 1 (x + µ 2 )/r 3 1 + µ 2 (x − µ 1 )/r 3 2]<br />
13 (3.16): ÿ + 2nẋ − n 2 y = −[µ 1 /r 3 1 + µ 2 /r 3 2]y
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 21<br />
<br />
, L 4 <br />
. , <br />
. , <br />
, <br />
. , <br />
(linear stability analysis) <br />
.<br />
<br />
(x 0 , y 0 ) , <br />
. (X, Y ) . <br />
(x, y) = (x 0 + X, y 0 + Y ) <br />
. (3.19) 14 , (3.20) 15 , <br />
.<br />
( ) ( ( )) ( ( ))<br />
∂U ∂ ∂U<br />
∂ ∂U<br />
Ẍ − 2nẎ ≈ + X<br />
+ Y<br />
.<br />
∂x<br />
0<br />
∂x ∂x<br />
0<br />
∂y ∂x<br />
0<br />
( ( )<br />
∂ 2 U ∂ 2 U<br />
= X + Y<br />
(3.99)<br />
∂x∂y<br />
∂x 2 )0<br />
( ) ( ( ))<br />
∂U ∂ ∂U<br />
Ÿ + 2nẊ ≈ + X<br />
∂y<br />
0<br />
∂x ∂y<br />
( ) ( ∂ 2 U ∂ 2 U<br />
= X + Y<br />
∂x∂y<br />
0<br />
0<br />
0<br />
+ Y<br />
( ∂<br />
∂y<br />
( )) ∂U<br />
,<br />
∂y<br />
0<br />
. (3.100)<br />
∂y<br />
)0<br />
2<br />
0 <br />
. , (∂U/∂x) 0 = (∂U/∂y) 0 = 0 <br />
(∂U/∂x = ∂U/∂y = 0 <br />
). <br />
, (X, Y ) <br />
. <br />
<br />
(linearise) <br />
. <br />
.<br />
n = 1, ,<br />
( ∂ 2 U<br />
U xx =<br />
Ẍ − 2Ẏ = XU xx + Y U xy , Ÿ + 2Ẋ = XU xy + Y U yy . (3.101)<br />
, U<br />
∂x<br />
)0<br />
2 xy =<br />
( ) ( ∂ 2 U<br />
∂ 2 U<br />
, U yy = . (3.102)<br />
∂x∂y<br />
0<br />
∂y<br />
)0<br />
2<br />
<br />
. <br />
, <br />
. <br />
.<br />
, <br />
.<br />
⎛ ⎞ ⎛<br />
⎞ ⎛ ⎞<br />
Ẋ 0 0 1 0 X<br />
Ẏ<br />
⎜ ⎟<br />
⎝ Ẍ ⎠ = 0 0 0 1<br />
Y<br />
⎜<br />
⎟ ⎜ ⎟<br />
(3.103)<br />
⎝ U xx U xy 0 2 ⎠ ⎝ Ẋ ⎠<br />
Ÿ U xy U yy −2 0 Ẏ<br />
14 (3.19): ẍ − 2nẏ = ∂U<br />
∂x<br />
15 (3.20): ÿ + 2nẋ = ∂U<br />
∂y
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 22<br />
, 2 2 <br />
, 4 1 <br />
. <br />
.<br />
⎛<br />
X = ⎜<br />
⎝<br />
X<br />
Y<br />
Ẋ<br />
Ẏ<br />
Ẋ = AX, (3.104)<br />
⎞<br />
⎛<br />
⎞<br />
0 0 1 0<br />
⎟<br />
⎠ and A = 0 0 0 1<br />
⎜<br />
⎟<br />
⎝ U xx U xy 0 2 ⎠ . (3.105)<br />
U xy U yy −2 0<br />
<br />
, (3.104) , A n × n , X n-<br />
, <br />
.<br />
x <br />
,<br />
Ax = λx, (3.106)<br />
λ <br />
. x A <br />
(eigenvector), λ <br />
. A <br />
, (3.106) <br />
x A <br />
, x <br />
, <br />
.<br />
(3.104) <br />
, A <br />
. (3.106) <br />
,<br />
(A − λI)x = 0, (3.107)<br />
. I n × n <br />
. n <br />
, A − λI 0<br />
, <br />
.<br />
det(A − λI) = 0. (3.108)<br />
<br />
. λ n <br />
, n <br />
.<br />
n <br />
, λ (3.106) , x <br />
.<br />
, (3.104) <br />
. X X i <br />
<br />
. , <br />
, Ẋ , X, Y , Ẏ <br />
. , <br />
<br />
, <br />
, . X , Ẏ i Y i <br />
, n Y i <br />
<br />
. <br />
<br />
. X Y .<br />
Y = BX, (3.109)<br />
B <br />
.<br />
X = B −1 Y , Ẋ = B −1 Ẏ , (3.110)<br />
, (3.104) <br />
.<br />
B −1 Ẏ = AB −1 Y . (3.111)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 23<br />
, B ,<br />
Ẏ = BB −1 Ẏ = BAB −1 Y . (3.112)<br />
(3.112) , Y <br />
. B Λ <br />
.<br />
BAB −1 = Λ. (3.113)<br />
Λ <br />
. B −1 <br />
A <br />
, Λ A <br />
.<br />
⎛<br />
⎞<br />
λ 1 0 · · · 0<br />
0 λ 2 · · · 0<br />
Λ = ⎜<br />
⎝<br />
.<br />
. . ..<br />
⎟<br />
. ⎠<br />
0 0 · · · λ n<br />
(3.114)<br />
<br />
,<br />
Ẏ = ΛY . (3.115)<br />
<br />
,<br />
Ẏ i = λ i Y i . (3.116)<br />
(3.116) <br />
Y i = c i e λ it . (3.117)<br />
c i n <br />
. Y i <br />
, X i <br />
. (3.110) ⎛<br />
X = B −1 Y = B −1 ⎜<br />
⎝<br />
⎞<br />
c 1 e λ 1t<br />
c 2 e λ 2t<br />
⎟<br />
. ⎠<br />
c n e λnt<br />
(3.118)<br />
n <br />
c i , (3.118) n <br />
<br />
.<br />
<br />
, <br />
. n = 4 , <br />
<br />
.<br />
−λ 0 1 0<br />
0 −λ 0 1<br />
det(A − λI) =<br />
= 0 (3.119)<br />
U xx U xy −λ 2<br />
∣ U xy U yy −2 −λ ∣
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 24<br />
<br />
.<br />
λ 4 + (4 − U xx − U yy )λ 2 + U xx U yy − U 2 xy = 0. (3.120)<br />
, λ 4 , λ 2 2 <br />
. , ,<br />
[<br />
1<br />
λ 1,2 = ±<br />
2 (U xx + U yy − 4)<br />
− 1 2<br />
[<br />
(4 − Uxx − U yy ) 2 − 4(U xx U yy − U 2 xy) ] 1/2<br />
[<br />
1<br />
λ 3,4 = ±<br />
2 (U xx + U yy − 4)<br />
+ 1 2<br />
[<br />
(4 − Uxx − U yy ) 2 − 4(U xx U yy − U 2 xy) ] 1/2<br />
] 1/2<br />
(3.121)<br />
] 1/2<br />
(3.122)<br />
(3.118) , 4 A <br />
, . (3.118) X, Ẋ <br />
.<br />
X =<br />
4∑<br />
ᾱ j e λjt , Ẋ =<br />
j=1<br />
4∑<br />
ᾱ j λ j e λjt . (3.123)<br />
j=1<br />
ᾱ j <br />
. X Y , Ẏ <br />
, ¯β j ,<br />
Y =<br />
4∑<br />
¯β j e λjt , Ẏ =<br />
j=1<br />
4∑<br />
¯β j λ j e λjt , (3.124)<br />
j=1<br />
<br />
. 4 <br />
, ¯β j ᾱ j . ¯βj <br />
ᾱ j (3.101) . (3.101) X, Y , Ẏ <br />
,<br />
4∑<br />
(ᾱ j λ 2 j − 2 ¯β j λ j − U xx ᾱ j − U xy ¯βj )e λjt = 0. (3.125)<br />
j=1<br />
¯β j <br />
,<br />
¯β j = λ2 j − U xx<br />
2λ j + U xy<br />
ᾱ j , (3.126)<br />
. t = 0 , <br />
X = X 0 , Y = Y 0 , Ẋ = Ẋ0, Ẏ = Ẏ0 , 4 ᾱ j 4 <br />
.<br />
4∑<br />
ᾱ j = X 0 ,<br />
j=1<br />
4∑<br />
λ j ᾱ j = Ẋ0,<br />
j=1<br />
4∑<br />
¯β j = Y 0 ,<br />
j=1<br />
4∑<br />
λ j ¯βj = Ẏ0, (3.127)<br />
j=1
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 25<br />
<br />
(3.123), (3.123) , ᾱ j , ¯β j <br />
, <br />
. , <br />
.<br />
<br />
Ā = µ 1<br />
+ µ 2<br />
(3.128)<br />
(r1) 3 0 (r<br />
[ 2) 3 0<br />
µ1<br />
¯B = 3 + µ ]<br />
2<br />
y<br />
(r1) 5 0 (r2) 5 0 2 (3.129)<br />
[<br />
0<br />
]<br />
(x 0 + µ 2 ) (x 0 − µ 1 )<br />
¯C = 3 µ 1 + µ<br />
(r1) 5 2 y<br />
0 (r2) 5 0 , (3.130)<br />
0<br />
]<br />
(x 0 + µ 2 )<br />
¯D = 3<br />
[µ 2 (x 0 − µ 1 ) 2<br />
1 + µ<br />
(r1) 5 2 . (3.131)<br />
0 (r2) 5 0<br />
U xx = 1 − Ā + ¯D, (3.132)<br />
U yy = 1 − Ā + ¯B, (3.133)<br />
U xy = ¯C. (3.134)<br />
. , λ j , ᾱ j , ¯β j <br />
, , X, Y , Ẋ, Ẏ <br />
.<br />
<br />
(3.121),(3.122) ,<br />
λ 1,2 = ±(j 1 + ik 1 ), λ 3,4 = ±(j 2 + ik 2 ). (3.135)<br />
. j 1 , k 1 , j 2 , k 2 <br />
, i = √ −1 . <br />
, <br />
e λjt <br />
, 2 e +(j+ik)t e −(j+ik)t <br />
<br />
. j = 0 , <br />
. ,<br />
e +ikt , e −ikt <br />
, <br />
. j <br />
, <br />
. <br />
<br />
. <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 26<br />
3.7.1 <strong>The</strong> Collinear Points<br />
Lagrangian Point <br />
L 1 , L 2 , L 3 <br />
. <br />
, y 0 = 0,<br />
(r1) 2 0 = (x 0 + µ 2 ) 2 , (r2) 2 0 = (x 0 − µ 1 ) 2 ,<br />
U xx = 1 + 2Ā, U yy = 1 − Ā, U xy = 0. (3.136)<br />
<br />
λ 4 + (2 − Ā)λ2 + (1 + Ā − 2Ā2 ) = 0, (3.137)<br />
.<br />
, µ 2 = 0.01 L 1 , 3.6 <br />
. 3.6 , x 0 = 0.848, y 0 = 0. X 0 = Y 0 = 10 −5 , Ẋ 0 = Ẏ0 = 0, , <br />
±2.90, ±2.31i . <br />
L 1 <br />
. ᾱ j ,<br />
¯β j <br />
, X(t), Y (t) <br />
.<br />
X(t) =6.99 × 10 −6 e −2.90t + 4.96 × 10 −6 e +2.90t<br />
+ 1.96 × 10 −6 cos 2.32t + 2.54 × 10 −6 sin 2.32t,<br />
Y (t) =3.25 × 10 −6 e −2.90t − 2.31 × 10 −6 e +2.90t<br />
+ 9.06 × 10 −6 cos 2.32t + 6.96 × 10 −6 sin 2.32t,<br />
(3.138)<br />
2 X, Y <br />
. µ 2 <br />
1/2.90 .<br />
3.12: <br />
( ) ( ) . logµ 2
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 27<br />
L 1 <br />
3.12 . µ 2 0.1 0.001 <br />
. <br />
, ±j, ±ik . j, k <br />
. L 2 , L 3 <br />
.<br />
<br />
, , <br />
.<br />
<br />
.<br />
(λ 1 λ 2 )(λ 3 λ 4 ) = 1 + Ā − 2Ā2 (3.139)<br />
(3.121), (3.122) , λ 1 = −λ 2 , λ 3 = −λ 4 . <br />
(<br />
) , λ 2 1 = λ 2 2 < 0, λ 2 3 = λ 2 4 < 0 <br />
. ,<br />
1 + Ā − 2Ā2 = (1 − Ā)(1 + 2Ā) > 0 . <br />
−1/2 < Ā < 1 <br />
<br />
. , (3.128) <br />
r 1 , r 2 <br />
, µ 2 < 1/2 , Ā > 1 . <br />
µ 2 <br />
. , (3.138) <br />
, <br />
<br />
. <br />
, x <br />
. 2 , <br />
, <br />
. , 2 <br />
2 <br />
. <br />
, 2 <br />
1 <br />
. x <br />
, <br />
.<br />
, <br />
, <br />
(Szebehely 1967). , - L 1 <br />
SOHO(Domingo et al., 1995)<br />
<br />
, <br />
.<br />
3.7.2 <strong>The</strong> Triangular Points<br />
Lagrangian Point <br />
L 4 , L 5 <br />
. , r 1 = r 2 = 1,<br />
x = 1/2 − µ 2 , y = ± √ 3/2 ,<br />
U xx = 3/4, U yy = 9/4, U xy = ±3 √ 3(1 − 2µ 2 )/4. (3.140)<br />
. <br />
λ 4 + λ 2 + 27 4 µ 2(1 − µ 2 ) = 0. (3.141)<br />
. <br />
. L 4 , µ 2 = 0.01 , x 0 = 0.49, y 0 = √ 3/2<br />
<br />
. <br />
, ±0.963i, ±0.268i ,
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 28<br />
<br />
. X(t) =3.45 × 10 −5 cos 0.268t − 2.45 × 10 −5 cos 0.963t,<br />
+ 3.07 × 10 −4 sin 0.268t − 8.55 × 10 −5 sin 0.963t,<br />
Y (t) =5.20 × 10 −5 cos 0.268t − 4.20 × 10 −5 cos 0.963t,<br />
− 1.76 × 10 −4 sin 0.268t + 4.90 × 10 −5 sin 0.963t,<br />
(3.142)<br />
. <br />
, 1/0.268, 1/0.963 2 <br />
.<br />
3.13 <br />
. , logµ 2 ≈ −1.4<br />
<br />
, logµ 2 <br />
. , ±j ± ik , <br />
. , µ 2 <br />
, , <br />
, <br />
.<br />
3.13 <br />
, <br />
. U xx , U yy ,<br />
U xy (3.121), (3.122) <br />
, <br />
.<br />
√<br />
−1 − √ 1 − 27(1 − µ 2 )µ 2<br />
λ 1,2 = ±<br />
√ (3.143)<br />
2<br />
λ 3,4 = ±<br />
√<br />
−1 + √ 1 − 27(1 − µ 2 )µ 2<br />
√<br />
2<br />
(3.144)<br />
, <br />
.<br />
1 − 27(1 − µ 2 )µ 2 ≥ 0<br />
µ 2 ≤ 27 − √ 621<br />
54<br />
≈ 0.0385 (3.145)<br />
<br />
, k 1 , k 2 , λ 1,2 = ±ik 1 , λ 3,4 = ±ik 2 <br />
. , a j , b j <br />
, α j = ā j + i¯b j , X(t) <br />
.<br />
X(t) =(ā 1 + i¯b 1 )e +ik 1t + (ā 2 + i¯b 2 )e −ik 1t<br />
+ (ā 3 + i¯b 3 )e +ik 2t + (ā 4 + i¯b 4 )e −ik 2t .<br />
(3.146)<br />
Y (t) <br />
. (3.127) X, Y , Ẋ, Ẏ <br />
, ā 1 = ā 2 =<br />
a 1 , ā 3 = ā 4 = a 2 , ¯b 1 = −¯b 2 = b 1 , ¯b 3 = −¯b 4 = b 2 <br />
, e , <br />
.<br />
X(t) =(a 1 + ib 1 )e +ik 1t + (a 1 − ib 1 )e −ik 1t<br />
+ (a 2 + ib 2 )e +ik 2t + (a 2 − ib 2 )e −ik 2t ,<br />
(3.147)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 29<br />
e iθ = cos θ + i sin θ <br />
, <br />
.<br />
X(t) = 2a 1 cos k 1 t + 2a 2 cos k 2 t − 2b 1 sin k 1 t − 2b 2 sin k 2 t. (3.148)<br />
, <br />
, <br />
. , <br />
, .<br />
(3.145) <br />
, , ±(j ± ik) (<br />
3.13 <br />
). ,<br />
X(t) =(ā 1 + i¯b 1 )e (j+ik)t + (ā 1 − i¯b 1 )e (j−ik)t<br />
+ (ā 2 + i¯b 2 )e (−j+ik)t + (ā 2 + i¯b 2 )e (−j−ik)t ,<br />
(3.149)<br />
X(t) = 2(a 1 e jt + a 2 e −jt ) cos kt − 2(b 1 e jt + b 2 e −jt ) sin kt. (3.150)<br />
<br />
. <br />
.Y , Ẋ, Ẏ . .<br />
<br />
.<br />
<br />
(µ 2 < 0.0385) <br />
. (3.143), (3.144) ,<br />
√<br />
λ 1,2 ≈ ± −1 + 27 √<br />
4 µ 2, λ 3,4 ≈ ± − 27<br />
4 µ 2. (3.151)<br />
<br />
, µ 2 <br />
, <br />
2 <br />
. L 4 , L 5 <br />
2 3.13: <br />
( ) ( ) . logµ 2 . <br />
logµ 2 ≈ −1.4 .
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 30<br />
3.14: (3.142) . ( ) epicenter ( )<br />
<br />
. epicenter <br />
, L 4 <br />
. <br />
<br />
epicenter <br />
.<br />
, <br />
. (3.145) <br />
. <br />
(resonances) <br />
, <br />
, (3.145) <br />
(Deprit & Deprit-Bartholome 1967 ).<br />
3.8 Motion near L 4 and L 5<br />
<br />
, µ 2 <br />
, 2π <br />
. 3.7 <br />
, 2π/λ 1,2 , 2π/λ 3,4 . <br />
<br />
2 <br />
.<br />
• 2π/λ 1,2 ≈ 2π ( µ 2 <br />
.),<br />
• 2π/λ 3,4 , (libration) <br />
,<br />
.<br />
2 <br />
ᾱ j , ¯β j <br />
, <br />
. , <br />
epicenter , , epicenter <br />
( ) <br />
(3.14). <br />
(3.142) <br />
<br />
3.15 <br />
2 . <br />
30 <br />
. X <br />
. (X ′ , Y ′ ) <br />
.<br />
( ) (<br />
) ( )<br />
X ′ (t) cos 30 − sin 30 X(t)<br />
=<br />
. (3.152)<br />
Y ′ (t) sin 30 cos 30 Y (t)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 31<br />
3.15: L 4 <br />
. <br />
(3.142) , t = 0 25π (µ 2 <br />
12.5 ) <br />
. 3.8 <br />
epicenter <br />
.<br />
X(t), Y (t) (3.142) ,<br />
X(t) ≈3.54 × 10 −4 sin 0.268t − 9.85 × 10 −5 sin 0.963t,<br />
Y (t) ≈6.23 × 10 −5 cos 0.268t − 4.86 × 10 −5 cos 0.963t,<br />
(3.153)<br />
<br />
, <br />
. 2 , (2.40)<br />
16 <br />
, <br />
. epicenter , <br />
<br />
. 3.10 <br />
associated zero-velocity<br />
curve <br />
, , , <br />
b/a = (3µ 2 ) 1/2 <br />
<br />
.<br />
epicenter <br />
(epicyclic) , <br />
, <br />
2:1 <br />
. , <br />
, 2.6 2 <br />
the guideing center approximation <br />
. , 2e, <br />
e <br />
<br />
. e ≈ 5 × 10 −5 . <br />
<br />
, <br />
, µ 2 ” ” (epicenter <br />
) 2:1<br />
<br />
” ” <br />
. <br />
, , , <br />
epicenter <br />
.<br />
16 (2.40) : (¯x/a) 2 + (ȳ/b) 2 = 1
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 32<br />
3.9 Tadpole and Horseshoe Orbits<br />
L 4 , L 5 <br />
, . <br />
, <br />
. , <br />
. (3.2<br />
(3.16) 17 , (3.17) 18 )<br />
3.16 L 4 µ 2 = 0.001 2 , <br />
<br />
. <br />
-<br />
. 3.16a , 3.16b<br />
<br />
L 4 . <br />
L 4 <br />
. 3.16a <br />
86 , 3.16b 115 <br />
. 2 L 4 <br />
, 2 <br />
<br />
, 3.16 , <br />
µ 1 <br />
<br />
. <br />
Tadpole . <br />
. Tadpole orbit L 5 .<br />
, <br />
L 4 , L 5 <br />
<br />
. <br />
, L 4 , L 5 <br />
. (Horseshoe orbit)<br />
. 3.17 2 <br />
. Taylor (1981) <br />
. 3.17b , <br />
.<br />
3.16, 3.17 epicenter 3.9 <br />
.<br />
3.16: µ 2 = 0.001 , L 4 <br />
Tadpole (L 4 <br />
x 0 = 1/2 − µ 2 , y 0 = √ 3/2). <br />
µ 1 , µ 2 . (a) <br />
x = x 0 + 0.0065, y = y 0 + 0.0065, ẋ = ẏ = 0 , µ 2 15 <br />
. (b) x = x 0 + 0.008, y = y 0 + 0.008, ẋ = ẏ = 0 , µ 2 15.5 <br />
<br />
.<br />
17 (3.16): ẍ − 2nẏ − n 2 x = −[µ 1 (x + µ 2 )/r 3 1 + µ 2 (x − µ 1 )/r 3 2]<br />
18 (3.17): ÿ + 2nẋ − n 2 y = −[µ 1 /r 3 1 + µ 2 /r 3 2]y
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 33<br />
3.17: µ 2 = 0.000953875 2 <br />
(Taylor 1981). (a) :<br />
x = −0.97668, ẏ = −0.06118, y = ẋ = 0 (b) : x = −1.02745, ẏ = 0.04032, y =<br />
ẋ = 0.<br />
, 3.10 <br />
, µ 2 <br />
2 <br />
, <br />
. 3.16, 3.17 <br />
<br />
, <br />
. , L 4 , L 5 <br />
, <br />
. , Jacobi L 4 , L 5 <br />
<br />
, <br />
, <br />
.<br />
<br />
Tadpole <br />
. 3.18 , µ 2 = 10 −3 , 3 (<br />
1 , Tadpole 2 ) <br />
. θ , , µ 1 µ 2 <br />
<br />
. 3 <br />
e ≈ 0 . <br />
, L 4 , L 5 <br />
, Tadpole<br />
<br />
. <br />
, L 3 <br />
,θ = 180 , <br />
. r<br />
, a <br />
, e ≈ 0 . 3.16, 3.17 <br />
.<br />
µ 2 = 10 −3 <br />
a, e 3.19 . µ 2 <br />
<br />
a . <br />
a a > 1 a < 1 , <br />
<br />
(3.19a). a = 1 + ∆a , θ = 180 ∆a <br />
, <br />
. ∆a = 0.020 . , 1 <br />
∆a = −0.0143 . , 2 <br />
∆a = 0.0198 , <br />
<br />
. , |∆a| <br />
1 <br />
. 3.15 ,
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 34<br />
3.18: µ 2 = 10 −3 3 <br />
a θ <br />
.<br />
<br />
, <br />
. <br />
µ 2 100 <br />
. <br />
.<br />
<br />
(Dermotto et al., 1980,<br />
Dermott & Marray 1981a). 3.19b µ 2 e , 1 <br />
. <br />
, phase effects <br />
(L 4 , L 5 , Tisserand <br />
3.19: 3.18 <br />
(a) a . (b) e <br />
. , µ 2 = 10 −3 .
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 35<br />
3.20: µ 2 = 10 −3 3 <br />
a θ <br />
.<br />
<br />
, <br />
. Tadpole <br />
. µ 2 100 <br />
. <br />
.<br />
, <br />
). , <br />
impulse .<br />
<br />
3.20, 3.21 . µ 2 = 10 −6<br />
. µ 2 <br />
, <br />
a = 1.002 (∆a 1 <br />
3.21: 3.20 <br />
(a) a . (b) e <br />
. , µ 2 = 10 −6 .
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 36<br />
<br />
). 3.20 θ a <br />
. a , 3.18 , L 4 , L 5 ( θ = 60 , 300 ) <br />
. , 2 <br />
<br />
. , L 3 <br />
, µ 2 <br />
, θ = 180 L 3 <br />
. , 2 Tadpole , 3.18 , 45 135 <br />
, a 3.18 <br />
. , Tadpole <br />
, µ 2 <br />
. Tadpole , <br />
, <br />
Tadpole .<br />
µ 2 , <br />
3.21 <br />
. <br />
∆a = 0.00200 , 1 <br />
∆a = −0.00199, 2 <br />
∆a = 0.00200 <br />
. <br />
<br />
, µ 2 <br />
. e <br />
, <br />
. , <br />
µ 2 <br />
.<br />
<br />
, <br />
, <br />
. <br />
L 4 , L 5 <br />
. , <br />
L 3 <br />
(Tadpole ). <br />
<br />
, L 4 , L 3 , L 5 <br />
( ). ,<br />
<br />
, epicenter , <br />
(circulate) . Jacobi <br />
µ 2 <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 37<br />
3.10 Orbits and Zero-Velocity Curves<br />
<br />
, <br />
. 3.15 <br />
, 30 <br />
. , <br />
, 30 , <br />
<br />
. L 4 <br />
x = 1/2 − µ 2 , y = √ 3/2 <br />
<br />
. (3.8) 19 , (3.9) 20 , x → (1/2 − µ 2 ) + x, y √ 3/2 + y <br />
. , 30 <br />
, x → √ 3x ′ /2 + y ′ /2,<br />
y → −x ′ /2 + √ 3y ′ /2 , <br />
(x ′ , y ′ ) . <br />
,<br />
r 2 1 = 1 + 2y ′ + x ′2 + y ′2 (3.154)<br />
r 2 2 = 1 − √ 3x ′ + y ′ + x ′2 + y ′2 (3.155)<br />
. (3.22) 21 <br />
, C J = 2U ,<br />
<br />
.<br />
C J = 1 − µ 2 − √ ( 1 −<br />
3µ 2 x ′ + (2 − µ 2 )y ′ + x ′2 + y ′2 µ2<br />
+ 2 + µ )<br />
2<br />
, (3.156)<br />
r 1 r 2<br />
, O(µ 2 2) <br />
. (3.156) <br />
, <br />
.<br />
C J ≈ 3 − µ 2 + 9 4 µ 2x ′2 + 3y ′2 (3.157)<br />
3 <br />
, , (i)µ 2 <br />
, (ii) 3.9 <br />
µ 2 , µ 2 y ′ <br />
<br />
. µ 2 x <br />
. <br />
. ,<br />
C J = 3 + γµ 2 (3.158)<br />
<br />
. γ <br />
, L 4 ,L 5 -1 ((3.97) 22 , <br />
(3.98) 23 ). (3.157) ,<br />
x ′2<br />
(4/9)(1 + γ) + y ′2<br />
(µ 2 /3)(1 + γ)<br />
= 1. (3.159)<br />
<br />
. , (2.40) 24 <br />
, <br />
, , a ′ = (2/3) √ 1 + γ, b ′ = √ µ 2 /3 √ 1 + γ , L 4 <br />
19 (3.8): r 2 1 = (x + µ 2 ) 2 + y 2 + z 2<br />
20 (3.9): r 2 2 = (x − µ 1 ) 2 + y 2 + z 2<br />
21 (3.22): U = n 2 (x 2 + y 2 )/2 + µ 1 /r 1 + µ 2 /r 2<br />
22 (3.97) : C L4 ≈ 3 − µ 2 ,<br />
23 (3.98) : C L5 ≈ 3 − µ 2<br />
24 (2.40) : ( ) ¯x 2 (<br />
a + ȳ<br />
) 2<br />
b = 1.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 38<br />
<br />
. b ′ /a ′ = (1/2) √ 3µ 2 <br />
, µ 2 → 0 <br />
, <br />
. b ′ /a ′ 3.8 guiding center <br />
2 , <br />
.<br />
µ 2 ≪ µ 1/2<br />
2 ≪ µ 1/3<br />
2 ≪ 1 <br />
. , <br />
, , <br />
.<br />
, (3.94)-(3.98) 25 <br />
, tadpole <br />
, γ <br />
.<br />
−1 ≤ γ ≤ +1. (3.160)<br />
L 4 , L 5 <br />
C J , L 3 <br />
. <br />
,<br />
C J = 3 + ζµ 2/3<br />
2 + O(µ 2 ) (3.161)<br />
where<br />
0 ≤ ζ ≤ 3 4/3 . (3.162)<br />
<br />
L 3 C J . L 1 , L 2 <br />
. ,<br />
γ ζ <br />
tadpole <br />
.<br />
U <br />
(3.64) 26 , n = 1 ,<br />
. (3.28) ,<br />
2U = 2 µ 1<br />
r 1<br />
+ µ 1 r 2 1 + 2 µ 2<br />
r 2<br />
+ µ 2 r 2 2 − µ 1 µ 2 , (3.163)<br />
v 2 = ṙ 2 + (r ˙θ) 2 = 2U − C J (3.164)<br />
µ 2 ≪ 1 <br />
, r 1 r <br />
.<br />
, <br />
, <br />
, δr ≪ 1 ,<br />
r = 1 + δr. (3.165)<br />
<br />
, ˙θ = 0, ṙ ≠ 0 µ 2 <br />
|ṙ| ≪ |r ˙θ| . ,<br />
<br />
,<br />
25<br />
(3.94) :C L1 ≈ 3 + 3 4/3 µ 2/3<br />
2 − 10µ 2 /3<br />
(3.95) :C L2 ≈ 3 + 3 4/3 µ 2/3<br />
2 − 14µ 2 /3,<br />
(3.96) :C L3 ≈ 3 ( + µ 2 , ) ( ) 26 1<br />
(3.64) : U = µ 1 r 1<br />
+ r2 1 1<br />
2<br />
+ µ 2 r 2<br />
+ r2 2<br />
2<br />
− 1 2 µ 1µ 2 .<br />
v ≈ r ˙θ = − 3 δr, (3.166)<br />
2
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 39<br />
. <br />
, (3.163) 2U <br />
. O(µ 2 )<br />
<br />
,<br />
2U = 3 + 3δr 2 + µ 2 H, (3.167)<br />
where<br />
H = 2 r 2<br />
+ r 2 2 − 4, (3.168)<br />
, v 2 = 2U − C J (3.164) <br />
.<br />
9<br />
4 δr2 = 3 + 3δr 2 + µ 2 H − C J . (3.169)<br />
<br />
v 2 = 0 , <br />
.<br />
0 = 3 + 3δr 2 zv + µ 2 H zv − C J (3.170)<br />
zv <br />
, <br />
.<br />
C J <br />
, (3.169), (3.170) <br />
δr 2 = (2δr zv ) 2 + 4 3 µ 2(H zv − H). (3.171)<br />
tadpole , <br />
, H zv −H ∼ δr, µ 2 δr ≪ δr 2 . guiding<br />
center ,<br />
δr = 2δr zv , (3.172)<br />
, guiding center <br />
2 <br />
(Dermott & Murray 1981a).<br />
<br />
(3.161), (3.162) ,<br />
3 + 3 4 δr2 + µ 2 H = 3 + ζµ 2/3<br />
2 + O(µ 2 ),<br />
3 + 3δr 2 zv + µ 2 H zv = 3 + ζµ 2/3<br />
2 + O(µ 2 ),<br />
(3.173)<br />
. <br />
, µ 2 2 ≫ µ 2 <br />
,<br />
µ 2/3<br />
δr = 2δr zv = 2(ζ/3) 1/2 µ 1/3<br />
2 . (3.174)<br />
tadpole <br />
(3.158), (3.160) ,<br />
3 + 3 4 δr2 + µ 2 H = 3 + γµ 2 , 3 + 3δr 2 zv + µ 2 H zv = 3 + γµ 2 . (3.175)<br />
<br />
δr ≈ 2δr zv = 2[(γ − H)/3] 1/2 µ 1/2<br />
2 , (3.176)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 40<br />
. , guiding center <br />
2 <br />
.<br />
L 4 , L 5 <br />
3.8 . ,δr ≈ 2δr zv ,<br />
guiding center <br />
, <br />
2 .<br />
<br />
3 , , (3.153) 27 <br />
, <br />
.<br />
X ′ (t) = a sin λ 3 (t − t 3 ) − 2e sin λ 1 (t − t 1 )<br />
Y ′ (t) = (3µ 2 ) 1/2 a cos λ 3 (t − t 3 ) − e cos λ 1 (t − t 3 )<br />
(3.177)<br />
λ 1 , λ 3 2 <br />
, 4 a, e, t 1 , t 3 , X ′ (0), Y ′ (0),<br />
Ẋ ′ (0), Ẏ ′ (0) <br />
. 2 , e guiding center <br />
e <br />
. 3 , <br />
, L 4 , L 5 <br />
guiding center <br />
, <br />
<br />
. <br />
.<br />
L 4 , L 5 <br />
, L 3 <br />
. <br />
Jacobi <br />
. (3.173), (3.175) <br />
.<br />
3<br />
4 δr2 + µ 2 H(θ) = constant, (3.178)<br />
θ µ 1 <br />
µ 2 <br />
, µ 1 <br />
2 3 <br />
<br />
r 2 = 2 sin(θ/2) <br />
,<br />
(<br />
H(θ) = sin<br />
2) θ −1<br />
− 2 cos θ − 2, (3.179)<br />
. (3.178) , tadpole γµ 2 , <br />
2 .<br />
<br />
2 (r i , θ i ), (r j , θ j ) <br />
. <br />
.<br />
ζµ 2/3<br />
δr 2 i − δr 2 j = − 4 3 µ 2[H(θ i ) − H(θ j )] (3.180)<br />
<br />
tadpole <br />
. 3.22 H(θ)<br />
θ <br />
. tadpole <br />
, δr i = δr j = 0 <br />
, H(θ i ) = H(θ j ) . <br />
2 θ min ,<br />
θ max , µ 2 <br />
, , 2 <br />
D = θ max − θ min <br />
<br />
. 3.22 H(θ) , 3.18, 3.20 tadpole <br />
<br />
.<br />
27 X(t) ≈3.54 × 10−4 sin 0.268t − 9.85 × 10 −5 sin 0.963t,<br />
Y (t) ≈6.23 × 10 −5 cos 0.268t − 4.86 × 10 −5 cos 0.963t.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 41<br />
3.22: (3.179) H(θ) , tadpole <br />
θ <br />
. L 4 θ , L 5 θ <br />
.<br />
θ i = 180 , δr i = 0 <br />
. critical tadpole <br />
. H(180<br />
) = 1 , (3.180) <br />
δr 2 j = 4 3 µ 2[1 − H(θ j )], (3.181)<br />
. H(θ) ≥ −1 tadpole <br />
.<br />
( ) 1/2 8<br />
δr ≤ δr crit = µ 1/2<br />
2 . (3.182)<br />
3<br />
, µ 2 <br />
, e <br />
, δr(<br />
µ 2 ) 1 <br />
tadpole <br />
.<br />
θ i = 180 δr i = δr 180 ≠ 0 <br />
. , ζ ≤ 3 3/4 <br />
<br />
, δr j = 0, θ j = θ min <br />
. <br />
.<br />
δr 2 180 = 4 3 µ 2[H(θ min ) − 1], (3.183)<br />
, <br />
µ 2 <br />
. ,<br />
θ min <br />
µ 2 <br />
. tadpole <br />
H(θ min ) = 1<br />
δr 180 = 0, θ min , , µ 2 θ min = 23.5<br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 42<br />
3.11 Trojan Asteroids and Satellites<br />
<br />
-<br />
(3.145) <br />
. -<br />
<br />
. Table 3.1 -<br />
<br />
Tadpole <br />
. Trojan asteroids(<br />
) <br />
.1998 <br />
Trojan asteroids<br />
450 , L 4 <br />
“Greeks”, L 5 <br />
“Trojan” .<br />
3.23 1997 12 <br />
-<br />
.(a) <br />
, (b) -<br />
, <br />
. -<br />
, , -<br />
.<br />
, <br />
-<br />
. <br />
, (coorbital satellites) .<br />
coorbital <br />
Janus Epimetheus <br />
<br />
, <br />
. <br />
-<br />
-<br />
. tadpole <br />
.<br />
3.9 <br />
. (3.174),<br />
(3.176) <br />
∼ µ 1/3<br />
2 tadpole ∼ µ 1/2<br />
2 <br />
. 2 <br />
R ∼ µ 1/6<br />
2 <br />
, R µ 2 <br />
. µ 2 ≈ 10 −3 R ≈ 0.3, µ 2 ≈ 10 −9 R ≈ 0.03 <br />
. <br />
<br />
. <br />
, 3.23: (a)1997 12 18 0:00 <br />
. <br />
. (b) <br />
, . <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 43<br />
<br />
, <br />
tadpole <br />
<br />
. Dermott & Murray(1981a) 2 µ 2 <br />
|∆a| <br />
, , Γ = T/µ 3/5<br />
2 <br />
.<br />
3.12 Janus and Epimetheus<br />
<br />
tadpole <br />
. , 3.9 <br />
, L 4 , L 5 , L 3 <br />
<br />
. <br />
, <br />
, <br />
.<br />
1980 Voyager I <br />
, Janus Epimetheus 2 <br />
. <br />
Janus, Epimetheus , a J = 151472km, a E =<br />
151422km , <br />
175km, 105km . 2 <br />
<br />
, , <br />
<br />
1 <br />
. Janus-Epimetheus µ 2 = 5 × 10 −9 ,<br />
δr = 3 × 10 −4 , (3.182) δr > δr crit ≈ 17km, (3.174) ζ = 0.02 < 3 4/3 <br />
, Epimetheus <br />
.<br />
, <br />
Epimetheus , Janus <br />
(<br />
0.25 <br />
.), , 2 <br />
<br />
. , <br />
, 2 ,<br />
<br />
. 2 , <br />
2 <br />
, Janus Epimetheus . W J , W E Janus , Epimetheus <br />
, <br />
, <br />
, .<br />
m J W J = m E W E (3.184)<br />
3.5 <br />
. m 2 < m 1 2 m 1 , m 2 . 2 , <br />
, <br />
m c <br />
(3.24). C 1 m 1 m c ,<br />
C <br />
, C 1 , C, m 2 <br />
. m 2 m c , m 1 <br />
<br />
. C R 2 <br />
T 2 .<br />
2.9 ((2.149) 28 ) <br />
. (2.145)<br />
v 29 e 2 = 0 <br />
,<br />
ȧ 2 = 2T 2 /n 2 , (3.185)<br />
28 dh<br />
(2.149) :<br />
dt = r ¯T<br />
29 da<br />
(2.145) :<br />
dt = 2 √<br />
a 3/2<br />
[ ¯Re sin f + ¯T (1 + e cos f)].<br />
µ(1−e 2 )
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 44<br />
3.24: <br />
m 1 , m 2 <br />
. m c . C 1 m 1 m c . C .<br />
a 2 , n 2 m 2 <br />
. guiding center epicyclic , <br />
guiding center <br />
. <br />
, <br />
.<br />
m 2 <br />
m c , m 1 <br />
. 3.24 ,<br />
T 2 = ( −Gm 1 /r 2 2)<br />
sin γ, +<br />
(<br />
−Gmc /r 2) sin β, (3.186)<br />
C 1 m 2 <br />
,<br />
and<br />
sin γ =<br />
sin β =<br />
m c r<br />
cos θ m c + m 1 r 0 2<br />
(3.187)<br />
m 1 r<br />
sin θ (3.188)<br />
m c + m 1 r 0<br />
r<br />
= m [<br />
c + m 1<br />
a ∗ 4 m ( )<br />
1 mc + m 1<br />
sin 2 θ ] −1/2<br />
≈ m c + m 1<br />
, (3.189)<br />
r 0 m c m c m c 2 m c<br />
. <br />
θ , m 1 ≪ m c <br />
, <br />
. T 2 = − ( gm 1 /r 2) ¯H(θ), (3.190)<br />
¯H(θ) =<br />
cos(θ/2)<br />
4 sin 2 − sin θ (3.191)<br />
(θ/2)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 45<br />
¯H(θ) = −(1/2)dH(θ)/dθ . m 1 <br />
,<br />
T 1 = + ( gm 2 /r 2) ¯H(θ), (3.192)<br />
.<br />
<br />
, 2 <br />
<br />
. <br />
, (3.185) <br />
s = a 2 − a 1 , (3.193)<br />
ṡ = ˙θds/dθ = −2(T 1 − T 2 )/n, (3.194)<br />
n <br />
. 3 ˙θ/n = −(3/2)s/a. a <br />
<br />
. ds/dθ (s i , θ i ), (s j , θ j ) ,<br />
( si<br />
) 2 ( sj<br />
) 2 8<br />
− =<br />
a a 3 g m ∫<br />
1 + m 2<br />
4<br />
θ<br />
n 2 a 3 i θ j ¯H(θ)dθ = −<br />
3 g m 1 + m 2<br />
[H(θ<br />
n 2 a 3 i ) − H(θ j )] , (3.195)<br />
. (3.191) , ¯H(θ) ±60 <br />
. n <br />
, <br />
1 r . n n 2 r 3 = g(m c + m 1 + m 2 ). (3.196)<br />
r ≈ a , <br />
, m c + m 1 + m 2 ≈ m c <br />
, (3.195) ( si<br />
) 2 ( sj<br />
) 2 4 m 1 + m 2<br />
− = − [H(θ<br />
a a 3 n 2 a 3 i ) − H(θ j )] (3.197)<br />
. (3.180) m 2 ≪ m 1 <br />
. 2 <br />
<br />
. (3.182), (3.183) ( ( ) 1/2 ( ) ( s 8 m1 + m 2<br />
=<br />
1/2) (3.198)<br />
a)<br />
crit 3 m c<br />
and<br />
( s180<br />
a<br />
) ( )<br />
2 4 m1 + m 2<br />
= [H(θ min ) − 1]. (3.199)<br />
3 m c<br />
<br />
Janus Epimetheus <br />
. <br />
, s j = ∆a 0 = 50km , θ i = 180 . (3.197) m 2 /m 1 = 0.25 <br />
, <br />
, s θ <br />
. a J = a + ∆a J , a E = a + ∆a E , (3.184) , <br />
<br />
, ∆a J ∆a E <br />
(<br />
3.25). <br />
Janus <br />
. <br />
, <br />
, <br />
. 3 <br />
, <br />
±60 <br />
(3.18, 3.20).<br />
<br />
, ±60 <br />
<br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 46<br />
3.25: Janus-Epimetehus <br />
∆a J /∆ 0 , ∆a E /∆ 0 . <br />
∆ 0 = 50km 180 <br />
2 <br />
. <br />
. Janus <br />
Epimetheus <br />
±60 <br />
.<br />
3.26: Janus-Epimetheus 2 <br />
<br />
. <br />
. , <br />
∼ 0.25 .
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 47<br />
3.27: 2 <br />
. Janus-Epimetheus<br />
<br />
.<br />
3.26 2 <br />
. <br />
. Janus Epimetheus 10 km , 40 km . , <br />
150432 km . <br />
, <br />
. , 4 <br />
, .<br />
<br />
, Dermott & Murray (1981b) Janus Epimetheus <br />
<br />
, <br />
. (3.199) <br />
. 3.27 2 guiding center <br />
<br />
. s 180 /a = 3.32 × 10 −4 . <br />
, <br />
0.001 <br />
. Nicholson et<br />
al.(1992) <br />
, <br />
. Janus Epimetheus 5.64 <br />
, , <br />
0.65 ± 0.08g cm −3 , 0.63 ± 0.11g cm −3 <br />
.Voyger <br />
<br />
, <br />
, <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 48<br />
3.13 Hill’s Equation<br />
<br />
3 , <br />
(3.9 ). <br />
2 <br />
. <br />
, <br />
, <br />
.<br />
<br />
, , <br />
<br />
. µ 1 ≈ 1 ,x − y <br />
(3.16)<br />
30 , (3.17) 31 ,<br />
ẍ − 2ẏ − x = − x r 3 1<br />
ÿ + 2ẋ − y = − y r 3 1<br />
x − 1<br />
− µ 2 , (3.200)<br />
r2<br />
3<br />
y<br />
− µ 2 , (3.201)<br />
r2<br />
3<br />
. , x x → x + 1 , ∆ = r 2 . <br />
(<br />
L 1 , L 2 ) <br />
, x, y, ∆ O(µ 1/3<br />
2 ) <br />
<br />
. µ 2 <br />
, r 1 ≈ (1 + 2x) 1/2 . <br />
(3.200), (3.201) <br />
ẍ − 2ẏ =<br />
(<br />
3 − µ 2<br />
∆ 3 )<br />
x = ∂U H<br />
∂x , (3.202)<br />
ÿ − 2ẋ = − µ 2<br />
∆ 3 y = ∂U H<br />
∂y , (3.203)<br />
where<br />
U H = 3 2 x2 + µ 2<br />
∆ , and ∆2 = x 2 + y 2 , (3.204)<br />
<br />
. Jacobi <br />
,<br />
C H = 3x 2 + 2 µ 2<br />
∆ − ẋ2 − ẏ 2 , (3.205)<br />
. Jacobi (3.29) z <br />
, n = 1 <br />
.<br />
(<br />
C J = x 2 + y 2 µ1<br />
+ 2 + µ )<br />
2<br />
− ẋ 2 − ẏ 2 , (3.206)<br />
r 1 r 2<br />
(3.202), (3.203) Hill (Hill’s euation) , Hill <br />
. (3.202) , 3∆ 3 = µ 2 , <br />
. 30 (3.16): ẍ − 2nẏ − n 2 x = −[µ 1 (x + µ 2 )/r 3 1 + µ 2 (x − µ 1 )/r 3 2]<br />
31 (3.17): ÿ + 2nẋ − n 2 y = −[µ 1 /r 3 1 + µ 2 /r 3 2]y
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 49<br />
3.28: µ 2 = 0.1 L 1 , L 2 <br />
. Hill ,<br />
<br />
µ 2 <br />
.<br />
<br />
. , Hill (Hill’s sphere) <br />
.<br />
∆ H =<br />
( µ2<br />
) 1/3<br />
. (3.207)<br />
3<br />
(3.202), (3.203) ẋ = ẏ = ẍ = ÿ = 0 (x ≠ 0) , L 1 , L 2 <br />
<br />
. (3.202) ∆ L1,2 = (µ 2 /3) 1/3 , (3.205) C H = 3 4/3 µ 2/3<br />
2<br />
. L 1 , L 2 (3.207) Hill <br />
. ,<br />
C H = ζµ 2/3<br />
2 (3.208)<br />
<br />
, ζ < 3 4/3 <br />
. L 1 , L 2 <br />
3.28 .<br />
<br />
, <br />
<br />
. <br />
ẋ = ẍ = ÿ = 0 , x, ẏ <br />
<br />
.<br />
ẏ 2 = 3x 2 − ζµ 2/3<br />
2 . (3.209)<br />
, (3.205), (3.208) , , ∆ <br />
. , x zv <br />
x <br />
, ẏ = 0 <br />
,<br />
x 2 zv = 1 3 ζµ2/3 2 , (3.210)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 50<br />
3.29: Hill <br />
( ) ( )<br />
.<br />
. n 2 a 3 = 1 , ẏ = −(3/2)x <br />
,<br />
x 2 = 4 3 ζµ2/3 2 , (3.211)<br />
, x = 2x zv <br />
2 . 3.10 <br />
. 3.29 <br />
.<br />
<br />
, guiding center<br />
<br />
(Dermott & Murray 1981a, b).<br />
<br />
, Tisserand <br />
. a 1 = 1 + ∆a 1 ,<br />
e = ∆e 1 , <br />
a 2 = 1 + ∆a 2 , e = ∆e 2 . ∆a 1 , ∆a 2 ,<br />
∆e 1 , ∆e 2 <br />
. 3.4 Tisserand <br />
32 1<br />
1 + ∆a + 2(1 + ∆a)1/2 (1 − ∆e 2 ) 1/2 ≈ constant, (3.212)<br />
. <br />
3<br />
4 ∆a2 − ∆e 2 ≈ constant, (3.213)<br />
or<br />
3<br />
4 ∆a2 1 − ∆e 2 1 ≈ 3 4 ∆a2 2 − ∆e 2 2. (3.214)<br />
32 T isserand :<br />
1<br />
2a + √ a(1 − e 2 ) cos I = 1<br />
2a ′ + √ a ′ (1 − e ′2 ) cos I ′
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 51<br />
. <br />
( ∆a 1 ≈ −∆a 2 ) , ∆e 1 ≈<br />
∆e 2 .<br />
Hill <br />
. (3.202), (3.203) ∆ <br />
,<br />
, (3.205) (3.208) ,<br />
ẍ − 2ẏ = 3x, (3.215)<br />
ÿ − 2ẋ = 0, (3.216)<br />
ẋ 2 + ẏ 2 = 3x 2 − ζµ 2/3<br />
2 , (3.217)<br />
<br />
. guiding center <br />
n = 1, <br />
, x = ∆a + e sin t, ẋ = e cos t, ẍ = −e sin t<br />
<br />
. (3.215), (3.216) ÿ = −2e cos t,<br />
ẏ = − 3 ∆a − 2e sin t, (3.218)<br />
2<br />
. <br />
guiding center <br />
, <br />
guiding center<br />
<br />
. (3.217) x, ẋ, ẏ ,<br />
e 2 cos 2 t +<br />
(<br />
− 3 2 ∆a − 2e sin t ) 2<br />
= 3(∆a + e sin t) 2 − ζµ 2/3<br />
2 , (3.219)<br />
. <br />
3<br />
4 ∆a2 − ∆e 2 = ζµ 2/3<br />
2 , (3.220)<br />
. . <br />
Tisserand <br />
.<br />
y (<br />
, guiding center ) , <br />
∆ min <br />
. 3.29 , <br />
<br />
y <br />
. 1 + ∆a 0 <br />
<br />
. Hill <br />
(x 0 , y 0 ) , (3.218) <br />
(3.205) <br />
ẏ 0 = − 3 2 x 0 = − 3 2 ∆a 0 (3.221)<br />
|∆a 0 | = 2(ζ/3) 1/2 µ 1/3<br />
2 (3.222)<br />
y <br />
, x = 0, ẏ =<br />
0, ẋ = ẋ min , y = ∆ min . ẋ min <br />
ẋ . (3.205) <br />
ẋ min = 2 µ 2<br />
∆ min<br />
− ζµ 2/3<br />
2 . (3.223)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 52<br />
3.30: <br />
Hill <br />
. , L 1 , L 2 <br />
(x ′ , y ′ ) = (±1, 0) <br />
. <br />
y ′ = ±200 ẋ ′ = 0 <br />
. <br />
.<br />
ẋ 2 min ≪ ẏ0(Dermott 2 & Murray 1981a) ,<br />
y min ≈ (2/ζ) 1/2 µ 1/3<br />
2 , (3.224)<br />
, ∆a <br />
y min ≈ 8 3 ∆2 0µ 2 (3.225)<br />
.<br />
Hill <br />
µ 1/3<br />
2 .<br />
(3.202), (3.203) m 1/3<br />
2 x → x ′ (µ 2 /3) 1/3 y → y ′ (µ 2 /3) 1/3 ∆ → ∆ ′ (µ 2 /3) 1/3 <br />
, <br />
.<br />
ẍ ′ − 2ẏ ′ = 3x ′ (<br />
1 − 1<br />
∆ ′3 )<br />
, (3.226)<br />
ÿ ′ + 2ẋ ′ = −3 y′<br />
, (3.227)<br />
∆<br />
′3<br />
<br />
. <br />
. <br />
, L 1 , L 2 µ 2 <br />
<br />
. 3.30 <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 53<br />
<br />
, <br />
y ′ . y ′<br />
<br />
(| x′ |≪ 1.7) <br />
” ” , <br />
. , |x ′ | <br />
, <br />
. |x ′ | <br />
, <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 54<br />
3.14 <strong>The</strong> Effects of Drag<br />
<br />
, <br />
, <br />
. <br />
Poyntingrobertson(PR)<br />
(<br />
) , <br />
. PR , <br />
. <br />
, , <br />
<br />
(∼ 10 −6 m). <br />
PR , <br />
.<br />
F = − βGm c<br />
a 2 r 2 (<br />
ẋ − y + x r 2 (xẋ + yẏ), ẏ + x + y r 2 (xẋ + yẏ) )<br />
(3.228)<br />
β <br />
, m c , a <br />
, . β<br />
<br />
. (3.228) r·ṙ <br />
, 2 PR (Schuerman 1980).<br />
Dermott & Gold (1977) <br />
, µ 2 < 10 −10 <br />
<br />
, .<br />
Dermott et al.(1980) <br />
. PR <br />
(Burns et al. 1979). , 3.31: <br />
. , <br />
. e ≈ 0 , <br />
r = 1, θ = 0, 360 <br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 55<br />
<br />
, <br />
, 1 <br />
. (3.31, 3.9 )<br />
L 4 , L 5 <br />
, , <br />
, <br />
, <br />
. <br />
. <br />
, <br />
<br />
.<br />
<br />
. , <br />
. <br />
, 2 <br />
. (i) <br />
, (ii) <br />
.<br />
, <br />
µ 1 , µ 2 , F = (F x , F y )<br />
. F = (F x , F y ) <br />
, k |F| = O(k) .<br />
3.14.1 Analysis of the Jacobi Constant<br />
3.2 , <br />
.<br />
ẍ − 2ẏ = ∂U<br />
∂x + F x, (3.229)<br />
ÿ + 2ẋ = ∂U<br />
∂y + F y. (3.230)<br />
(3.229) ẋ, (3.230) ẏ <br />
,<br />
(<br />
ẋẍ + ẏÿ − ẋ ∂U<br />
∂x + ẏ ∂U )<br />
= ẋF x + ẏF y . (3.231)<br />
∂y<br />
. , Jacobi C J = 2U − ẋ 2 − ẏ 2 <br />
,<br />
dC J<br />
dt<br />
= −2(ẋF x + ẏF y ) (3.232)<br />
. ẋF x + ẏF y <br />
F <br />
. <br />
k < 0 <br />
, C˙<br />
J ẋF x + ẏF y <br />
. 3.3 <br />
<br />
, C J <br />
, L 4 , L 5 <br />
.<br />
<br />
, F = kv = k(ẋ, ẏ) ,<br />
ẋF x + ẏF y = k(ẋ 2 + ẏ 2 ) < 0. (3.233)<br />
<br />
(nebular drag <br />
) , <br />
, L 4 , L 5<br />
<br />
(Jeffreys 1929).
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 56<br />
PR <br />
, F = k(ẋ − y, ẏ + x)/r 2 , (3.234)<br />
,<br />
ẋF x + ẏF y = k(ẋ 2 + ẏ 2 ) − k(ẋy − ẏx). (3.235)<br />
. , <br />
. <br />
, <br />
. <br />
Jacobi <br />
.<br />
3.14.2 Linear Stability of the L 4 and L 5 Points<br />
<br />
, . L 4 , L 5 , <br />
, <br />
. Murray (1994b)<br />
5 <br />
k , L 4 , L 5 <br />
.<br />
( ) 27<br />
λ 4 + a 3 λ 3 + (1 + a 2 )λ 2 +<br />
4 µ 2 + a 0 = 0. (3.236)<br />
a i (i = 0, 1, 2, 3) O(k) , <br />
.<br />
a 0 = 9 4 k x,x + 3 4 k y,y ∓ 3√ 3<br />
4 (k x,y + k y,x ) (3.237)<br />
a 1 = 9 4 k x,ẋ + 3 4 k y,ẏ + 2(k x,y − k y,x ) ∓ 3√ 3<br />
4 (k x,ẏ + k y,ẋ ) (3.238)<br />
a 2 = −k x,x − k y,y + (k x,ẏ − k y,ẋ ) (3.239)<br />
a 3 = −(k x,ẋ − k y,ẏ ), (3.240)<br />
(3.237), (3.238) <br />
L 4 , L 5 . ,<br />
k x,x , k y,x · · · <br />
.<br />
[ ] [ ]<br />
[ ] [ ]<br />
∂Fx<br />
∂Fy<br />
∂Fx<br />
∂Fy<br />
k x,x = , k y,x = , k x,ẋ = , k y,ẋ = ,<br />
∂x<br />
0<br />
∂x<br />
0<br />
∂ẋ<br />
0<br />
∂ẋ<br />
0<br />
[ ] [ ]<br />
[ ] [ ] (3.241)<br />
∂Fx<br />
∂Fy<br />
∂Fx<br />
∂Fy<br />
k x,y = , k y,y = , k x,ẏ = , k y,ẏ =<br />
∂y<br />
0<br />
∂y<br />
0<br />
∂ẏ<br />
0<br />
∂ẏ<br />
0<br />
0 , <br />
. , <br />
O(k) , <br />
, x 0 , y 0<br />
<br />
.
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 57<br />
3.32: L 4 , L 5 <br />
. ,<br />
<br />
. (a) (<br />
). (b)guiding center <br />
, <br />
(<br />
).(c)guiding center <br />
, <br />
(<br />
).(d) <br />
( )<br />
(3.236), (3.237) , a i O(µ 2 ) <br />
4 , <br />
((3.141) 33 ). <br />
, (3.145) 34 , <br />
. <br />
<br />
, 3.32 <br />
4 <br />
.<br />
1. <br />
, .<br />
2. guiding center <br />
, , .<br />
3. guiding center <br />
, , .<br />
4. <br />
, .<br />
Murray (1994b) , µ 2 → 0 <br />
λ <br />
, <br />
<br />
0 < a 1 < a 3 , (3.242)<br />
. a 1 , a 3 , (3.238), (3.240) <br />
. , <br />
<br />
, a 0 , a 2 <br />
, L 4 , L 5 <br />
k x,x , k y,y <br />
<br />
. L 4 , L 5 <br />
2 <br />
.<br />
F = k(ẋ, ẏ) <br />
, (3.241) <br />
,<br />
33 (3.141) : λ 4 + λ 2 + 27µ 2 /4(1 − µ 2 ) = 0<br />
34 (3.145) : µ 2 ≤ 27−√ 621<br />
54<br />
≈ 0.0385<br />
k x,ẋ = k, k y,ẏ = k, (3.243)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 58<br />
, <br />
a 1 = 3k, a 3 = −2k, (3.244)<br />
. k < 0 a 1 < 0 , (3.242) <br />
. <br />
, Jacobi <br />
, <br />
.<br />
PR , F = k(ẋ − y, ẏ + x)/r 2 , (3.241) <br />
<br />
k x,ẋ = k y,x = k y,ẏ = k, k x,y = −k (3.245)<br />
, <br />
a 1 = −5k, a 3 = −2k, (3.246)<br />
. PR <br />
.<br />
<br />
F = k(ẋ − y, ẏ + x) <br />
, (3.241) <br />
,<br />
k x,ẋ = k y,x = k y,ẏ = k, k x,y = −k, (3.247)<br />
,<br />
a 1 = −k, a 3 = −2k. (3.248)<br />
<br />
(3.242) , <br />
. , <br />
, Tadpole <br />
<br />
.<br />
3.14.3 Inertial Drag Forces<br />
Murray (1994b) <br />
.<br />
F i = kVg(x, y, ẋ, ẏ), (3.249)<br />
, k < 0 , V = (ẋ−y, ẏ+x) <br />
. g(x, y, ẋ, ẏ)<br />
<br />
. Murray (1994b) inertial<br />
drag . k <br />
r 2 r 3 1r 3 2 + µ 2 r 3 1(µ 1 x − r 2 ) − µ 1 r 3 2(µ 2 x + r 2 ) = 0, (3.250)<br />
. 5 <br />
. 3.33a , µ 2 = 0.2 <br />
.<br />
µ 2 → 0 <br />
, Murray L 3 , L 4 , L 5 <br />
, L 1 ,<br />
L 2 <br />
. g ∗ = g(x, y, 0, 0) = g ∗ (r)
3. <strong>The</strong> <strong>Restricted</strong> <strong>Three</strong>-<strong>Body</strong> <strong>Problem</strong> 59<br />
(<br />
) , µ 2 L 4 , L 5 <br />
.<br />
(<br />
)<br />
¯k<br />
1<br />
= sin θ<br />
µ 2 (2 − 2 cos θ) − 1 . (3.251)<br />
3/2<br />
, ¯k = kg ∗ (1) . <br />
3.33b <br />
. θ = 108.4,<br />
θ = 251.6 , ¯k/µ 2 = −0.7265, ¯k/µ 2 = +0.7265 <br />
. L 3 ,<br />
L 4 , 180 , 60 <br />
¯k/µ 2 = −0.7265 θ = 108.4 <br />
<br />
. g r <br />
. <br />
, g ∗ r <br />
, L 4 L 5 <br />
.<br />
inertial drag <br />
L 4 , L 5 <br />
3.14.2 <br />
. , Murray (1994b) inertial drag <br />
.<br />
F i = kVV i r i , (3.252)<br />
i, j . Murray , k < 0 <br />
<br />
.<br />
0 < 1 − i + 2j < 2 + i (3.253)<br />
, i = 0, j = n <br />
, <br />
−1/2 < n < 1/2 <br />
L 4 ,<br />
L 5 <br />
. <br />
<br />
. Murray (1994b) , , L 4 , L 5 <br />
. <br />
.<br />
3.33: (a) (3.249) µ 2 = 0.2 <br />
. (b)¯k/µ 2 (¯k <br />
, <br />
) L 3 , L 4 , L 5 <br />
θ(30¡θ¡330) . <br />
. k < 0<br />
, k > 0 <br />
.