Run-Time Parallelization of Large FEM Analyses with PERMAS - intes
Run-Time Parallelization of Large FEM Analyses with PERMAS - intes
Run-Time Parallelization of Large FEM Analyses with PERMAS - intes

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
[NASA’97] 4th National Symposium on <strong>Large</strong>-Scale Analysis and Design on High-Performance<br />
Computers and Workstations, October 14-17, 1997 in Williamsburg, VA<br />
<strong>Run</strong>-<strong>Time</strong> <strong>Parallelization</strong> <strong>of</strong><br />
<strong>Large</strong> <strong>FEM</strong> <strong>Analyses</strong> <strong>with</strong> <strong>PERMAS</strong><br />
1 INTRODUCTION<br />
M. Ast, ∗ R. Fischer, ∗ J. Labarta, ∗∗ H. Manz ∗<br />
∗ INTES Ingenieurgesellschaft für technische S<strong>of</strong>tware mbH, Stuttgart, Germany<br />
∗∗ Universitat Politécnica de Catalunya, Barcelona, Spain<br />
The general purpose Finite Element system <strong>PERMAS</strong> 1 has been extended to<br />
support shared and distributed parallel computer architectures as well as workstation<br />
clusters. The methods used to parallelize this large application s<strong>of</strong>tware<br />
package are <strong>of</strong> high generality and have the capability to parallelize all<br />
mathematical operations in a <strong>FEM</strong> analysis – not only the solver. Utilizing<br />
the existing hyper-matrix data structure for large, sparsely populated matrices,<br />
a programming tool called PTM was introduced that automatically parallelizes<br />
block matrix operations on-the-fly. PTM totally hides parallelization<br />
from higher order algorithms, thus giving the physically oriented expert a virtually<br />
sequential programming environment. An operation graph <strong>of</strong> sub-matrix<br />
operations is asynchronously build and executed. A clustering algorithm distributes<br />
the work, performing a dynamic load balancing and exploiting data<br />
locality. Furthermore a distributed data management system allows free data<br />
access from each node. The generality <strong>of</strong> the approach is demonstrated by<br />
some benchmark examples dealing <strong>with</strong> different types <strong>of</strong> <strong>FEM</strong> analyses.<br />
Two major characteristics have been persistent ever<br />
since the FE-Method is being used. Firstly, FE simulations<br />
are CPU time consuming, and secondly, they<br />
are I/O intensive !<br />
The ongoing evolution in the size and complexity <strong>of</strong><br />
finite element models shows that the actual available<br />
computer resources are still a limiting factor. The tendency<br />
to produce finer meshes <strong>with</strong> a higher number <strong>of</strong><br />
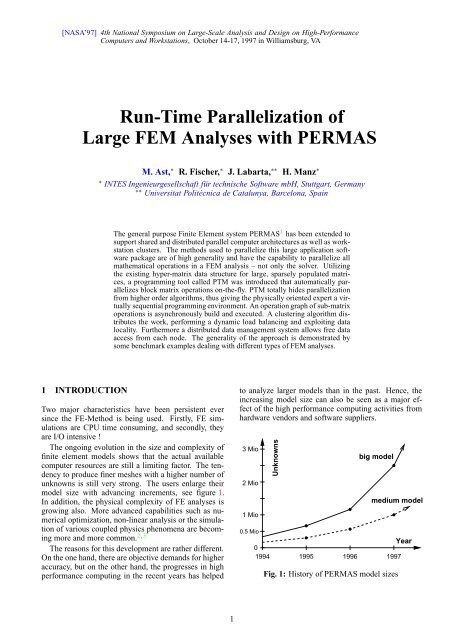
unknowns is still very strong. The users enlarge their<br />
model size <strong>with</strong> advancing increments, see figure 1.<br />
In addition, the physical complexity <strong>of</strong> FE analyses is<br />
growing also. More advanced capabilities such as numerical<br />
optimization, non-linear analysis or the simulation<br />
<strong>of</strong> various coupled physics phenomena are becoming<br />
more and more common. 2, 3<br />
The reasons for this development are rather different.<br />
On the one hand, there are objective demands for higher<br />
accuracy, but on the other hand, the progresses in high<br />
performance computing in the recent years has helped<br />
1<br />
to analyze larger models than in the past. Hence, the<br />
increasing model size can also be seen as a major effect<br />
<strong>of</strong> the high performance computing activities from<br />
hardware vendors and s<strong>of</strong>tware suppliers.<br />
3 Mio<br />
2 Mio<br />
1 Mio<br />
Unknowns<br />
big model<br />
medium model<br />
0.5 Mio<br />
Year<br />
0<br />
1994 1995 1996 1997<br />
Fig. 1: History <strong>of</strong> <strong>PERMAS</strong> model sizes
Y Z<br />
Since many years the time consuming pre-processing<br />
phase is the most costly part in analysis projects. Therefore<br />
automatic meshing tools were developed in order<br />
to reduce the turnaround times <strong>of</strong> this phase. Figure 2<br />
shows a typical example for a shell element model<br />
which can be generated from existing geometry in reasonable<br />
time only <strong>with</strong> at least half-automatic mesh<br />
generators. Automatic mesh generation does, however,<br />
almost inevitable lead to fine meshes <strong>with</strong> a large number<br />
<strong>of</strong> unknowns.<br />
Another trend is the increasing number <strong>of</strong> <strong>FEM</strong> computations.<br />
For example, the application <strong>of</strong> automatic<br />
mesh generators also allows even less experienced engineers<br />
to use such methods more and more.<br />
X<br />
Fig. 2: Car body <strong>with</strong> 130,000 shell elements<br />
(<strong>PERMAS</strong> at Karmann GmbH, Osnabrück)<br />
Fig. 3: Transmission housing <strong>with</strong> 311,000 nodes and<br />
963 contacts (<strong>PERMAS</strong> at ZF Friedrichshafen AG)<br />
2<br />
An impressive example for a today’s nonlinear analysis<br />
can be seen from figure 3. All interior shafts, gears,<br />
and bearings <strong>of</strong> the transmission housing are modeled<br />
together <strong>with</strong> excessive contact definitions. Figure 4<br />
shows a coupled simulation. Based on natural modes<br />
and frequencies, a response analysis has to be performed<br />
in the time and frequency domain subsequently.<br />
Fig. 4: Floating ship <strong>with</strong> fluid-structure interaction<br />
(<strong>PERMAS</strong> at IRCN, Nantes)<br />
Although computers became much faster in recent<br />
years, it is obvious that hardware speed alone is not<br />
the answer to the demands for high performance computing.<br />
Since single CPU speed enhancements become<br />
more and more difficult, parallelization seems to be the<br />
only solution for further performance speedups. 7<br />
The various forms <strong>of</strong> parallel algorithms for computational<br />
mechanics are as numerous as the number <strong>of</strong><br />
people working on the problem. 4, 5, 6 One obvious approach<br />
is the usage <strong>of</strong> data parallel programming languages<br />
such as parallel C or HPF. 8, 9 This may be a solution<br />
for new applications designed for these kind <strong>of</strong><br />
tools. However for a huge program system <strong>with</strong> a long<br />
sequential history, rewriting the whole s<strong>of</strong>tware (or significant<br />
parts <strong>of</strong> it) is not very practicable.<br />
The most popular way to perform an explicit parallelization<br />
<strong>of</strong> FE packages is the domain decomposition<br />
approach. 10, 11, 12, 13, 14, 15 In <strong>PERMAS</strong>, a completely alternative<br />
strategy has been selected. 16<br />
2 PARALLELIZATION STRATEGY<br />
A number <strong>of</strong> important requirements had to be taken<br />
into account:<br />
• Generality: A general purpose package like PER-<br />
MAS not only has one but several solvers and many<br />
different matrix operations. Hence, a parallelization<br />
<strong>of</strong> only one solver does not really help. Instead,<br />
a method is required which is able to parallelize<br />
all solvers and matrix operations in a uniform<br />
manner.
• Extendability: The approach must be open to new<br />
developments and has to ensure an easy upgrade <strong>of</strong><br />
already existent program parts, i.e. the top solution<br />
procedures shall stay unchanged.<br />
• Maintainability: For both the sequential and parallel<br />
execution, the algorithms and the program versions<br />
have to be the same in order to have a consistent<br />
development <strong>of</strong> functionalities. An approach is<br />
needed who is as machine independent as possible.<br />
• Portability: Only standard message passing must<br />
be used in order to be able to work on several<br />
machine architectures (like distributed memory,<br />
shared memory or workstation clusters).<br />
• Ease <strong>of</strong> use: The users should not need additional<br />
knowledge or training to operate <strong>with</strong> the parallel<br />
code.<br />
Based on the existing program and data structure, not<br />
the well-known domain decomposition but a strategy<br />
based on a mathematical operation graph has been chosen.<br />
Figure 5 gives a basic understanding <strong>of</strong> the approach<br />
based on a schematic comparison <strong>of</strong> the two parallelization<br />
methods.<br />
Whereas the parallelism <strong>of</strong> the domain decomposition<br />
method is achieved through the computation <strong>of</strong> partial<br />
(sub)models, the parallelism <strong>of</strong> the <strong>PERMAS</strong> approach<br />
stems from the computation <strong>of</strong> Tasks, which are<br />
basic mathematical operations on sub-matrices.<br />
Fig. 5: Different parallelization strategies<br />
3<br />
3 HYPER-MATRIX DATA STRUCTURE<br />
In a Finite Element system, one major objective is the<br />
efficient storage and handling <strong>of</strong> extremely large but<br />
sparsely populated matrices. In <strong>PERMAS</strong> this problem<br />
is solved by dividing the matrix in sub-matrices <strong>of</strong> variable<br />
block size (typically 30∗30 to 128∗128). The complete<br />
matrix, called hyper-matrix, is organized in three<br />
hierarchical levels where levels 2 and 3 contain nothing<br />
but references to the next lower level and level-1<br />
contains the actual data (see figure 6). 17, 18 Of course,<br />
at each level, only sub-matrices containing at least one<br />
non-zero element are stored and processed. Moreover,<br />
on level-1 only the rectangular area <strong>of</strong> real non-zeros<br />
<strong>with</strong>in that sub-matrix is actually stored.<br />
sym.<br />
n<br />
3<br />
Numeric<br />
Array<br />
(window)<br />
Level 2<br />
Submatrix<br />
n<br />
1<br />
m<br />
Level 3 Matrix<br />
Highest Level<br />
m<br />
m<br />
1<br />
3<br />
2<br />
n<br />
2<br />
Level 1 Submatrix<br />
Lowest Level (paragraph)<br />
Fig. 6: The hyper-matrix data structure<br />
A hyper-matrix operation can be viewed as a stream<br />
<strong>of</strong> basic block operations on sub-matrices, e.g. a<br />
multiply-add <strong>of</strong> two level-1 matrices. One major advantage<br />
<strong>of</strong> this scheme is the high granularity <strong>of</strong> operations<br />
and the fact that a basic operation typically requires<br />
2∗n 3 floating point operations but only 3∗n 2 memory<br />
accesses. The data structure is simple and hence easily<br />
understood by the programmers. The overhead for<br />
administration <strong>of</strong> the sub-matrices is small compared to<br />
the basic operations. The typical block size can easily<br />
be adapted to the actual matrix sparsity and hardware<br />
environment, e.g. to optimize vector length or<br />
I/O record size. With respect to parallelization it is<br />
worthwhile to mention that all basic operations on submatrices<br />
are <strong>of</strong> similar length, i.e. need the same order<br />
<strong>of</strong> time magnitude for execution.
4 PARALLEL TASK MANAGER<br />
Corresponding to the 3-level data structure all hypermatrix<br />
algorithms are organized in 3 well separated program<br />
layers: Two logical layers working only on addresses<br />
and one numerical layer – usually just a cap to<br />
a standard BLAS routine.<br />
Fig. 7: Parallel Task Manager<br />
For parallelization, a new s<strong>of</strong>tware layer called the<br />
Parallel Task Manager (PTM) 19 was introduced, see figure<br />
7. PTM <strong>of</strong>fers a complete set <strong>of</strong> functions for the<br />
traversal <strong>of</strong> hyper-matrices. These new functions replace<br />
all calls previously made to the sequential data<br />
base manager. A <strong>PERMAS</strong> programmer implementing<br />
a hyper-matrix algorithm will call PTM to ask for<br />
the existence and properties <strong>of</strong> particular sub-matrices.<br />
Based on this information he can organize the level 3<br />
and 2 loops just as before – in fact the level 3 and 2<br />
program structure stays unchanged and the call replacements<br />
are quite easy, because the new functions have<br />
similar names and arguments as the old data base calls.<br />
Finally, instead <strong>of</strong> directly calling a numerical level-1<br />
routine, the programmer passes a task request to PTM.<br />
Each task is defined by a certain opcode (i.e. an identifier<br />
for the level-1 routine to be called) and a reference<br />
to the level-1 sub-matrices to be used. After copying<br />
the task request in an internal buffer PTM immediately<br />
returns control to the calling layer. The task execution<br />
will then be done asynchronously on a node and in a<br />
sequence controlled by PTM.<br />
Inside PTM the graph <strong>of</strong> sub-matrix operations is<br />
asynchronously build and executed, see figure 8. The<br />
data dependencies are resolved by a graph generator,<br />
which works in a dynamic way according to the actual<br />
loops on the sparse matrix structure. A separate clustering<br />
algorithm collects basic mathematical operations<br />
into packages to be sent. Subsequently, the scheduler is<br />
4<br />
responsible to distribute the tasks to the different nodes<br />
for execution (using MPI). 20 Taking into account the<br />
execution times <strong>of</strong> completed tasks the scheduler also<br />
ensures a dynamic load balancing – thus adapting itself<br />
to the current load <strong>of</strong> each node and avoiding bottlenecks<br />
in data distribution.<br />
The problem <strong>of</strong> finding the optimal schedule <strong>of</strong> a<br />
number <strong>of</strong> interdependent tasks is NP complete like the<br />
ordering problem <strong>of</strong> a sequential graph. Therefore a<br />
number <strong>of</strong> heuristics have been developed to find reasonable<br />
schedules in affordable computing times. 21, 22<br />
Level-2<br />
address<br />
matrices<br />
Graph<br />
Clusterer<br />
Scheduler<br />
MPI<br />
Executor<br />
Level-1<br />
matrices<br />
*<br />
-<br />
+<br />
node 1<br />
hyper-matrix algorithm<br />
task (opcode + operand address)<br />
node 2<br />
data dependency<br />
node 3 node 4<br />
Fig. 8: Asynchronous generation<br />
and execution <strong>of</strong> tasks<br />
<strong>Run</strong>ning <strong>PERMAS</strong> on a sequential machine, PTM<br />
executes these basic operations in the same control flow<br />
as if the original functions had been called directly. This<br />
means that we can use the same program version for<br />
both sequential and parallel runs.<br />
The most important aspect <strong>of</strong> this approach is the<br />
fact that all details <strong>of</strong> parallel computing are completely<br />
handled inside the tools and hidden from the developer<br />
implementing a new hyper-matrix operation. This allows<br />
the adoption <strong>of</strong> the <strong>PERMAS</strong> program to future<br />
hardware architectures <strong>with</strong>out having to change large<br />
parts <strong>of</strong> the code. The effort in such developments is<br />
hence protected against hardware changes. Moreover,<br />
it is possible to improve the performance-critical parts<br />
like the clustering and scheduling mechanism <strong>with</strong>out<br />
changing any higher order algorithms.
In a parallel environment, the task execution is performed<br />
on the basis <strong>of</strong> a host-node concept. The host<br />
has only control functionality and executes all <strong>of</strong> the<br />
sequential program parts, whereas the nodes are executing<br />
all basic numerical operations <strong>of</strong> a parallel hypermatrix<br />
algorithm, figure 9. With respect to communication<br />
bandwidth it is important to note that a typical task<br />
definition requires less than 70 bytes and that several<br />
task clusters are sent at once in order to minimize the<br />
overall time needed for message startup.<br />
<strong>PERMAS</strong> <strong>PERMAS</strong><br />
Node<br />
Node<br />
<strong>PERMAS</strong><br />
<strong>PERMAS</strong><br />
Node Node<br />
<strong>PERMAS</strong><br />
Node<br />
<strong>PERMAS</strong><br />
Disk Disk Disk<br />
Disk Disk<br />
Host<br />
<strong>PERMAS</strong><br />
Node<br />
Disk Disk<br />
Disk<br />
Disk<br />
Fig. 9: Centralized Task Control<br />
5 DISTRIBUTED DATA BASE<br />
<strong>PERMAS</strong><br />
Node<br />
According to the new needs, the central data base system<br />
had to be upgraded too. A new, Distributed Data<br />
base Management System (DDMS) was introduced,<br />
that controls all data traffic from, and to, the direct access<br />
files <strong>of</strong> the physically distributed data base (above<br />
DDMS the data base is a logical unity <strong>with</strong> global references),<br />
see figure 10. One instance <strong>of</strong> DDMS runs on<br />
each node including the host – regardless <strong>of</strong> whether a<br />
node has own disks or not. For node-local I/Os DDMS<br />
handles the direct I/O to the local files. In addition it<br />
manages the network traffic due to remote data requests.<br />
Thus DDMS allows free data access from each node,<br />
exploiting the local cache and I/O channels <strong>of</strong> all nodes.<br />
Unlike the short task messages, the level-1 operands<br />
handled by DDMS have typical sizes <strong>of</strong> about 128<br />
kbytes. Therefore the distributed characteristic and the<br />
ability to handle node to node communication also ensures<br />
that the host will not become the communication<br />
or administration bottleneck (as it would be <strong>with</strong> a centralized<br />
data base).<br />
Disk<br />
Disk<br />
5<br />
Due to the asynchronity, the integrity <strong>of</strong> data has to be<br />
guaranteed. This is realized by a monotonously increasing<br />
version number for task operands, the producer task<br />
identifier (PTI). Each level-1 matrix owes its own PTI,<br />
which is also stored in the referring level-2 matrices.<br />
Each modification changes the PTI and a change is possible<br />
only for one task at a time. With this paradigm the<br />
data traffic can be minimized and possible deadlocks<br />
are avoided.<br />
Node<br />
DDMS<br />
Node<br />
DDMS<br />
Node<br />
DDMS<br />
Host<br />
DDMS<br />
Node<br />
DDMS<br />
Node<br />
DDMS<br />
Node<br />
DDMS<br />
Node<br />
DDMS<br />
Disk Disk Disk<br />
Disk Disk<br />
6 IN PRACTICE<br />
Disk Disk<br />
Disk<br />
Disk<br />
Fig. 10: Distributed Data Base<br />
Management System<br />
Above PTM the parallel and sequential code is identical.<br />
There is only one program version for sequential<br />
and parallel machine architectures. The basic program<br />
structure and programming style <strong>of</strong> the s<strong>of</strong>tware development<br />
team can stay unchanged – an essential item<br />
for the code owner’s investments in past and future.<br />
Another advantage is the separation <strong>of</strong> work fields between<br />
algorithmic oriented specialists and parallelization<br />
experts. The experience <strong>of</strong> the s<strong>of</strong>tware developers<br />
show that a functional splitting <strong>of</strong> work areas always<br />
pays <strong>of</strong>f in terms <strong>of</strong> productivity, code efficiency and<br />
last but not least stability. In <strong>PERMAS</strong> this separation<br />
is clearly reflected by different programming levels for<br />
machine, parallelization, algorithmic and physical experts,<br />
see figure 11. Furthermore a single program version<br />
keeps the maintenance simple. There is only one<br />
source code to handle and the quality assurance <strong>of</strong> the<br />
sequential version is applicable to parallel runs <strong>with</strong>out<br />
change. Again, this is an important point for an industrial<br />
s<strong>of</strong>tware vendor (who <strong>of</strong>ten spends more money on<br />
maintaining than developing a program).<br />
Disk<br />
Disk
Also the end user benefits from this run-time parallelization.<br />
Apart from faster execution times (and<br />
maybe access to more memory and disks) the user’s<br />
daily working environment does not change. No additional<br />
knowledge is necessary and no extra work is<br />
required (e.g. no special mesh partitioning). The program<br />
releases are consistent in the way that the parallel<br />
’version’ <strong>of</strong>fers identical functionality as the sequential<br />
one (indeed it’s the same binary). Moreover,<br />
because a sequential and a parallel run use the same<br />
algorithms, the sequence <strong>of</strong> operations remains also unchanged.<br />
This gives identical results independent <strong>of</strong> the<br />
number <strong>of</strong> computing nodes actually used. This even<br />
<strong>of</strong>fers the possibility to choose the number <strong>of</strong> nodes by<br />
the system administrator according to a global view <strong>of</strong><br />
available computing resources. The user does not have<br />
to care about parallelization – for him there is no difference<br />
between one faster or just more CPUs.<br />
7 BENCHMARKS<br />
All <strong>of</strong> the following benchmarks have been performed<br />
on an IBM SP-2 (except one specially mentioned), thus<br />
reflecting the behavior <strong>of</strong> a distributed memory architecture.<br />
All models have been calculated using the direct<br />
solver, since this is still the fastest solver for the<br />
sequential case. This ensures a realistic comparison <strong>of</strong><br />
run times.<br />
Compared to present-day mesh sizes the benchmark<br />
models are <strong>of</strong> medium size only. This is due to various<br />
reasons: First the benchmarks were selected at start<br />
<strong>of</strong> the parallelization project, thus reflecting the problem<br />
situation in 1994. Second, getting real upto-date<br />
industrial benchmarks for publications is not easy. On<br />
the other hand parallelization rates on larger problems<br />
are usually better, so smaller models are more appropriate<br />
to show possible limitations <strong>of</strong> the underlying parallelization<br />
strategy.<br />
✏✏<br />
Sequential or parallel hardware (distributed/shared)<br />
✏<br />
✏<br />
✘ Program interface for automatic run-time parallelization<br />
✘ ✘<br />
✥<br />
✥<br />
✥ Basic hyper-matrix algorithms<br />
✭✭ ✭✭<br />
<strong>PERMAS</strong> <strong>FEM</strong> system<br />
Fig. 11: <strong>PERMAS</strong> Program layers<br />
6<br />
Fig. 12: Crank Housing<br />
Fig. 12 (a): Crank Housing, Static Analysis
X<br />
Z<br />
Y<br />
Fig. 13: Methane Carrier<br />
Fig. 13 (a): Methane Carrier, Static Analysis<br />
Fig. 13 (b): Methane Carrier, Dynamic Analysis<br />
7<br />
Z<br />
Y<br />
X<br />
Fig. 14: Artificial Cube (scalable test case)<br />
Fig. 14 (a): Artificial Cube, Cholesky Decomposition<br />
Fig. 15: Contact Analysis <strong>of</strong> a Motor Piston
Fig. 16: Electromagnetic Wave Propagation <strong>of</strong> a Box<br />
Fig. 17: Casting Carrier, Static Analysis on SGI<br />
A static analysis <strong>of</strong> the crank housing shows a reasonable<br />
scalability up to 16 nodes, figure 12 (a). Figure<br />
13 (a) and 13 (b) display two different type <strong>of</strong> analysis<br />
for the methane carrier. For a static run <strong>of</strong> this small<br />
model, the solver part itself is less than 50 % <strong>of</strong> the total<br />
elapsed time already. For the dynamic job the cholesky<br />
decomposition is almost negligible. This demonstrates<br />
that it is not sufficient to parallelize just the solver part.<br />
Also from figure 13 (b) it can be seen that the run-time<br />
parallelization <strong>of</strong> PTM works for the whole application.<br />
In order to investigate the influence <strong>of</strong> the model size<br />
an artificial test case was created, figure 14 and 14 (a).<br />
Apart from minor improvements for the larger model,<br />
it can be seen that the parallelism exploited by PTM is<br />
basically independent <strong>of</strong> the problem size.<br />
Figure 15 present the elapsed times for a non-linear<br />
analysis, whilst figure 16 show the numbers achieved<br />
for the simulation <strong>of</strong> electromagnetic phenomena. Finally<br />
figure 17 gives an instance for a parallel job on a<br />
shared memory machine.<br />
8<br />
8 CONCLUSIONS<br />
The generality <strong>of</strong> the parallelization approach has been<br />
presented not only from conceptual but also from the<br />
application point <strong>of</strong> view. As shown by the examples,<br />
parallelization is also beneficial for medium size models.<br />
The PTM programming interface <strong>of</strong>fers a general<br />
toolbox for automatic parallelization <strong>of</strong> initially sequential<br />
hyper-matrix algorithms, enabling also unexperienced<br />
programmers to write parallel algorithms.<br />
With this approach, the number <strong>of</strong> CPUs used for<br />
an analysis becomes a mere performance parameter as<br />
it should be the case. The parallel <strong>PERMAS</strong> version<br />
may be used <strong>with</strong>out additional know-how and there is<br />
a guarantee <strong>of</strong> a consistent program evolution for both<br />
the sequential and the parallel version. This is a prerequisite<br />
for a protection <strong>of</strong> the investments made by the<br />
s<strong>of</strong>tware supplier. Moreover this is a basic requirement<br />
for a reliable usage on the customer’s side.<br />
Up to now only basic work was done <strong>with</strong> emphasis<br />
on a clean structure <strong>of</strong> the s<strong>of</strong>tware. In order to improve<br />
the scalability <strong>of</strong> the code and to fully exploit the potential<br />
<strong>of</strong> the parallelization approach, further development<br />
is needed. However, global tuning can be performed<br />
<strong>with</strong>out changing the PTM interface. This means that<br />
current and future <strong>PERMAS</strong> procedures will automatically<br />
benefit from any improvement made in this field.<br />
ACKNOWLEDGEMENT<br />
The work reported in this paper is supported by<br />
the European Comission under the ESPRIT projects<br />
PERMPAR 23 and PARMAT. 24<br />
REFERENCES<br />
1. <strong>PERMAS</strong>: User’s Reference Manual, INTES Publication<br />
No. 450, Rev. D, Stuttgart, 1997. 1<br />
2. CISPAR: Open interface for coupling <strong>of</strong> industrial simulation<br />
codes on parallel systems, Esprit project 20161,<br />
World Wide Web address: http://www.pallas.de/cispar/. 1<br />
3. Löhner, R., Yang, C., Cebral, J., Baum, J.D., Luo, H.,<br />
Pelessone, D. and Charman, C., Fluid Structure Interaction<br />
Using a Loose Coupling Algorithm and Adaptive Unstructured<br />
Grids, AIAA Paper 95-2259, 1995. 1<br />
4. Noor, A.K., Parallel processing in finite element structural<br />
analysis, Parallel Computations and Their Impact on Mechanics,<br />
ASME, 1987, pp.253-277. 2<br />
5. Ortega, J., Voigt, R., Romine, C., A bibliography on parallel<br />
and vector numerical algorithms, NASA Contractor<br />
Report 181764, ICASE Interim Report 6, 1988. 2<br />
6. White, D.W., Abel, J.F., Bibliography on finite elements<br />
and supercomputing, Commun. Applied Numeric Methods,<br />
4, 1988, pp.279-294. 2<br />
7. Topping, B.H.V., Khan, A.I., Parallel Finite Element<br />
Computations, Saxe-Coburg Publications, Edinburgh,<br />
UK, 1996. 2
8. Wilson, G.V., Lu, P., Stroustrup, B., Parallel Programming<br />
Using C++, MIT Press, Cambridge, MA, 1996. 2<br />
9. Perrin, G.-R., Darte, E., The Data Parallel Programming<br />
Model, Lecture Notes in Computer Science, Vol. 1132,<br />
Springer, Berlin, 1996. 2<br />
10. Farhat, C., Roux, F.-X., Implicit parallel processing<br />
in structural mechanics, Computational Mechanics Advances,<br />
1994, 2(1), pp.1-124. 2<br />
11. Topping, B.H.V., Sziveri, J., Parallel Sub-domain Generation<br />
Method, Developments in Computational Techniques<br />
for Structural Engineering, Civil-Comp Press, Edinburgh,<br />
UK, 1995, pp.449-457. 2<br />
12. Walshaw, C., Cross, M., Everett, M., Mesh partitioning<br />
and load-balancing for distributed memory parallel systems,<br />
Proc. Parallel & Distributed Computing for Computational<br />
Mechanics, Lochinver, Scotland, 1997. 2<br />
13. Liu, J.W.H., The Multifrontal Method for Sparse Matrix<br />
Solution: Theory and Practice, SIAM Review, 34, 1992,<br />
pp.82-109. 2<br />
14. PARASOL: An Integrated Programming Environment for<br />
Parallel Sparse Matrix Solvers, Esprit 4, World Wide Web<br />
address: http://www.genias.de/parasol/. 2<br />
15. Pothen, A., Rothberg, E., Simon, H.D., Wang, L., Parallel<br />
Sparse Cholesky Factorization <strong>with</strong> Spectral Nested Dissection<br />
Ordering, NAS Technical Report RNR-94-011,<br />
1994. 2<br />
16. Ast, M., Labarta, J., Manz, H., Pérez, A., Schulz and<br />
U., Solé, J., A General Approach for an Automatic <strong>Parallelization</strong><br />
Applied to the Finite Element Code <strong>PERMAS</strong>,<br />
Proceedings <strong>of</strong> the HPCN Conference, Springer, 1995. 2<br />
9<br />
17. Braun, K.A., et. al., Some Hypermatrix algorithms in Linear<br />
Algebra, Lecture Notes in Economics and Mathematical<br />
Systems, Vol. 134, Springer, Berlin, 1981. 3<br />
18. Rothberg, E., Gupta, A., An Efficient Block-Oriented Approach<br />
to Parallel Sparse Cholesky Factorization, SIAM<br />
Journal <strong>of</strong> Scientific Computing, 15, 1994, pp.1413-1439.<br />
3<br />
19. Ast, M., Labarta, J., Manz, H., Pérez, A., Schulz, U. and<br />
Solé, J., The <strong>Parallelization</strong> <strong>of</strong> <strong>PERMAS</strong>, Conference on<br />
Spacecraft Structures Materials & Mechanical Testing,<br />
ESA, 1996. 4<br />
20. Snir, M., Otto, S.W., Dongarra, J., MPI: The Complete<br />
Reference, MIT Press, Cambridge, MA, 1996. 4<br />
21. Ast, M., Jerez, T., Labarta, J., Manz, H., Pérez, A.,<br />
Schulz, U. and Solé, J., <strong>Run</strong>time <strong>Parallelization</strong> <strong>of</strong> the<br />
Finite Element Code <strong>PERMAS</strong>, International Journal <strong>of</strong><br />
Supercomputer Applications and High Performance Computing,<br />
1997, 11(4), pp.328-335. 4<br />
22. El-Rewini, H., Lewis, T., Ali, H.H., Task Scheduling in<br />
Parallel and Distributed Systems, Prentice-Hall, 1994. 4<br />
23. PERMPAR: Implementation <strong>of</strong> the General Purpose Finite<br />
Element Code <strong>PERMAS</strong> on High Parallel Computer<br />
Systems, EUROPORT-1, World Wide Web address:<br />
http://www.gmd.de/SCAI/europort-1/C2.HTM. 8<br />
24. PARMAT: Efficient Handling <strong>of</strong> <strong>Large</strong> Matrices on<br />
High Parallel Computer Systems in the <strong>PERMAS</strong><br />
Code, Esprit project 22740, World Wide Web address:<br />
http://www.<strong>intes</strong>.de/parmat/. 8