Solved Problems Chapter 3: Mechanical Systems - KFUPM Open ...
Solved Problems Chapter 3: Mechanical Systems - KFUPM Open ...
Solved Problems Chapter 3: Mechanical Systems - KFUPM Open ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ME 413: System Dynamics and Control<br />
Dr. A. Aziz Bazoune<br />
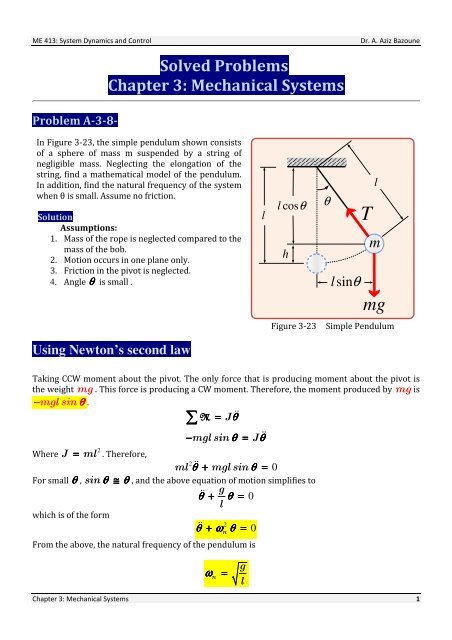
Problem A-3-8-<br />
<strong>Solved</strong> <strong>Problems</strong><br />
<strong>Chapter</strong> 3: <strong>Mechanical</strong> <strong>Systems</strong><br />
In Figure 3-23, the simple pendulum shown consists<br />
of a sphere of mass m suspended by a string of<br />
negligible mass. Neglecting the elongation of the<br />
string, find a mathematical model of the pendulum.<br />
In addition, find the natural frequency of the system<br />
when θ is small. Assume no friction.<br />
Solution<br />
Assumptions:<br />
1. Mass of the rope is neglected compared to the<br />
mass of the bob.<br />
2. Motion occurs in one plane only.<br />
3. Friction in the pivot is neglected.<br />
4. Angle θ is small .<br />
l<br />
l cosθ<br />
h<br />
θ<br />
T<br />
l<br />
m<br />
lsinθ<br />
mg<br />
Figure 3-23<br />
Simple Pendulum<br />
Using Newton’s second law<br />
Taking CCW moment about the pivot. The only force that is producing moment about the pivot is<br />
the weight mg . This force is producing a CW moment. Therefore, the moment produced by mg is<br />
− mgl sin θ .<br />
M = J && θ<br />
2<br />
= ml . Therefore,<br />
∑<br />
− mgl sin<br />
θ<br />
=<br />
J &&<br />
θ<br />
Where J<br />
2<br />
ml &&<br />
θ<br />
+ mgl sin<br />
θ<br />
=<br />
0<br />
For small θ , sin θ<br />
≅<br />
θ<br />
, and the above equation of motion simplifies to<br />
&& g<br />
θ<br />
+ θ<br />
=<br />
0<br />
l<br />
which is of the form<br />
&& 2<br />
θ<br />
+ ω θ<br />
=<br />
0<br />
From the above, the natural frequency of the pendulum is<br />
n<br />
ω =<br />
n<br />
g<br />
l<br />
<strong>Chapter</strong> 3: <strong>Mechanical</strong> <strong>Systems</strong> 1
ME 413: System Dynamics and Control<br />
Dr. A. Aziz Bazoune<br />
Using The Conservation of Energy Method<br />
The potential energy is<br />
V = mgh = mgl ( 1<br />
−<br />
cos θ )<br />
The kinetic energy is<br />
1 2 1 2 1<br />
T = mv = ms&<br />
= m ( lθ&<br />
) 2<br />
2 2 2<br />
1<br />
2<br />
T + V = m ( l & θ<br />
) + mgl ( 1<br />
−<br />
cos θ<br />
)<br />
2<br />
d ( T + V ) 1 2 2<br />
= ml &&& θθ + mgl ( & θ sin θ<br />
)<br />
=<br />
0<br />
dt 2<br />
d ( T + V )<br />
2<br />
= ( ml && θ<br />
+ mgl sin θ ) & θ<br />
=<br />
0<br />
dt<br />
Since & θ ≠ 0 , then the terms in brackets must be equal to zero, Therefore<br />
ml l && θ<br />
+ g sin θ<br />
=<br />
Or<br />
( ) 0<br />
&& g<br />
θ<br />
+ θ<br />
=<br />
l<br />
Which is similar to the differential equation obtained before.<br />
Problem A-3-12<br />
0<br />
For the spring-mass-pulley system of Figure 3-27, the<br />
moment of inertia of the pulley about the axis of rotation is<br />
J and the radius is R . Assume that the system is initially at<br />
equilibrium. The gravitational force of mass m causes a<br />
static deflection of the spring such that k δ<br />
st<br />
= mg .<br />
Assuming that the displacement x of mass m is measured<br />
from the equilibrium position, obtain a mathematical model<br />
of the system. In addition, find the natural frequency of the<br />
system.<br />
Solution<br />
Assumptions:<br />
1. Lever is rigid and massless.<br />
2. Reactions at lever P are neglected.<br />
3. Displacement x is small.<br />
4. The wire is inextensible.<br />
x<br />
T<br />
T<br />
m<br />
mg<br />
R<br />
k<br />
θ<br />
δ<br />
Using Newton’s second law<br />
Figure 3-27<br />
<strong>Chapter</strong> 3: <strong>Mechanical</strong> <strong>Systems</strong> 2
ME 413: System Dynamics and Control<br />
Dr. A. Aziz Bazoune<br />
Applying Newton’s second law for the mass m<br />
or<br />
∑<br />
F<br />
=<br />
mx&&<br />
− T<br />
= mx&& (1)<br />
Where T is the tension in the wire (Notice that since x is measured from the static equilibrium<br />
position the term mg does not enter into the equation).<br />
Applying Newton’s second law for the pulley<br />
or<br />
∑<br />
T<br />
=<br />
Jθ&&<br />
Eliminating T from equations (1) and (2) gives<br />
TR − kxR = Jθ&& (2)<br />
&& (3)<br />
− mxR − kxR = Jθ&&<br />
Noting that x<br />
or<br />
= Rθ , one can simplify the above equation<br />
( )<br />
&& (4)<br />
J + mR 2 θ<br />
+ kR<br />
2<br />
θ<br />
=<br />
0<br />
2<br />
⎛<br />
kR<br />
⎞<br />
θ<br />
+ ⎜<br />
θ<br />
=<br />
J + mR<br />
⎟<br />
⎝<br />
⎠<br />
&& (5)<br />
θ 0<br />
2<br />
which represents the mathematical model for the system. The natural frequency of the system is<br />
given by<br />
ω =<br />
n<br />
J<br />
2<br />
kR<br />
+ mR<br />
2<br />
(6)<br />
Using The Energy Method<br />
The kinetic energy of the system is<br />
1 2 1 2<br />
T = mx&<br />
+ Jθ&<br />
123 2 123 2<br />
Due to Translation<br />
Due to Rotation<br />
(7)<br />
The potential energy of the system is<br />
V<br />
1 2<br />
= kx<br />
(8)<br />
{ 2<br />
Strain energy of the spring<br />
<strong>Chapter</strong> 3: <strong>Mechanical</strong> <strong>Systems</strong> 3
ME 413: System Dynamics and Control<br />
Dr. A. Aziz Bazoune<br />
Noting that x<br />
= Rθ , one can simplify the above equation<br />
T + V<br />
1 2 1 2 1 2<br />
= mx&<br />
+ J & θ<br />
+<br />
kx<br />
2 2 2<br />
T + V<br />
1 2 2 1 2 1 2 2<br />
= mR &<br />
θ + J &<br />
θ +<br />
kR<br />
θ<br />
2 2 2<br />
T + V<br />
1 2 2 1 2 2<br />
= ( mR + J ) &<br />
θ<br />
+<br />
kR<br />
θ<br />
2 2<br />
(9)<br />
d 1 2 1 2<br />
( T + V ) = 0 ⇒ 2 ( mR + J ) &&& θθ<br />
+ 2 kR & θθ<br />
=<br />
0<br />
(10)<br />
dt<br />
2 2<br />
Or<br />
( )<br />
mR 2 + J && θ<br />
+ kR<br />
2<br />
θ<br />
=<br />
0<br />
(11)<br />
which is similar to the one obtained before<br />
Problem A-3-13<br />
In the mechanical system of Figure 3-28, one end of the lever is connected to a spring and a damper,<br />
and a force f ( t ) is applied to the other end of the lever. Derive a mathematical model of the<br />
system. Assume that the displacement x is small and the lever is rigid and massless.<br />
( ) f t<br />
l<br />
1<br />
l<br />
2<br />
P<br />
k<br />
x<br />
b<br />
Solution<br />
Assumptions:<br />
1. Lever is rigid and massless.<br />
2. Reactions at lever P are neglected.<br />
3. Displacement x is small.<br />
Figure 3-28<br />
<strong>Chapter</strong> 3: <strong>Mechanical</strong> <strong>Systems</strong> 4
ME 413: System Dynamics and Control<br />
Dr. A. Aziz Bazoune<br />
Free Body Diagram (FBD): The FBD is shown in the Figure below<br />
l<br />
l<br />
2<br />
1<br />
f ( t)<br />
P<br />
F<br />
k<br />
=−k x<br />
x<br />
Figure 3-28<br />
F<br />
b<br />
= −b x&<br />
Equation of motion:<br />
Applying Newton’s second law, for a system in rotation about point P gives<br />
∑<br />
M<br />
P<br />
= 0 ⇒ f ( t ) l 1 − b x&<br />
l 2 − k x l 2<br />
=<br />
0<br />
DID YOU ASK YOURSELF<br />
WHY THE RHS of the above equation is ZERO?<br />
Rearranging, one can write:<br />
or<br />
( ) ( & )<br />
f t l b x k x l<br />
1 − + 2 =<br />
0<br />
⎛<br />
l1<br />
⎞<br />
b x&<br />
+ k x = ⎜<br />
⎟<br />
f ( t )<br />
⎝<br />
l2<br />
⎠<br />
which is the mathematical model of the system. It is clear that this differential equation<br />
represents is a first order system since it is represented by a first order ordinary differential<br />
equation with constant coefficients. The RHS of the above differential equation is not zero.<br />
System Response:<br />
In the above system, the input is the force F while the output is the displacement x . We will<br />
try to find a relationship between the input and the output.<br />
Taking Laplace transform of both sides of the above equations provided we have zero initial<br />
conditions gives<br />
<strong>Chapter</strong> 3: <strong>Mechanical</strong> <strong>Systems</strong> 5
ME 413: System Dynamics and Control<br />
Dr. A. Aziz Bazoune<br />
where X ( s ) and ( )<br />
⎛<br />
l1<br />
⎞<br />
( b s + k ) X ( s) = ⎜<br />
⎟<br />
F ( s)<br />
⎝<br />
l2<br />
⎠<br />
F s are Laplace transform of x and f ( t ) , respectively. The above<br />
equation can be written as<br />
Output X ( s)<br />
⎛<br />
l ⎞<br />
1 C<br />
G ( s)<br />
= = = =<br />
Input F s l b s k b s k<br />
where C ( l1 l2<br />
)<br />
where C *<br />
1<br />
⎜<br />
⎟<br />
( ) ⎝ 2<br />
⎠ ( + ) ( +<br />
)<br />
= . The above relation can be written in the standard form as:<br />
Output X ( s)<br />
C b C *<br />
G ( s)<br />
= = = =<br />
Input F ( s) ⎛ k 1<br />
s<br />
⎞ ⎛ s<br />
⎞<br />
⎜ + ⎟ ⎜ +<br />
⎟<br />
⎝ b<br />
⎠ ⎝ τ<br />
⎠<br />
= C b and τ = b k<br />
( s )<br />
F<br />
14243<br />
Input<br />
C<br />
s +<br />
*<br />
( 1 τ )<br />
144424443<br />
Transfer Function<br />
( )<br />
X s<br />
1 42443<br />
Output<br />
The response ( )<br />
x t will depend on the input force f ( t ) . If f ( t ) is a step input of magnitude 1:<br />
F s = / s and<br />
C * 1 C * α β<br />
X ( s ) = F ( s ) = = +<br />
⎛ 1 ⎞ s ⎛ 1 ⎞ s ⎛ 1 ⎞<br />
⎜ s + ⎟ ⎜ s + ⎟ ⎜ s + ⎟<br />
⎝ τ ⎠ ⎝ τ ⎠ ⎝ τ ⎠<br />
In this case ( ) 1<br />
where<br />
α =<br />
Therefore,<br />
and hence<br />
1<br />
s<br />
s C *<br />
⎛ 1 ⎞<br />
⎜ s + ⎟<br />
⎝ ⎠<br />
τ<br />
s = 0<br />
⎛<br />
⎜<br />
1 ⎝<br />
= τC<br />
* and β =<br />
s<br />
⎛ ⎞<br />
⎜ 1 1 ⎟<br />
X ( s ) = τ C ⎜ − ⎟<br />
s ⎛ 1 ⎞<br />
s<br />
⎜ ⎜ + ⎟<br />
τ<br />
⎟<br />
⎝ ⎝ ⎠ ⎠<br />
1 ⎞<br />
s + ⎟ C *<br />
τ ⎠<br />
⎛ 1 ⎞<br />
⎜ s + ⎟<br />
⎝ τ ⎠ 1<br />
s = −<br />
τ<br />
= − τC<br />
*<br />
<strong>Chapter</strong> 3: <strong>Mechanical</strong> <strong>Systems</strong> 6
ME 413: System Dynamics and Control<br />
Dr. A. Aziz Bazoune<br />
( )<br />
τ<br />
⎛<br />
1<br />
⎜<br />
⎝<br />
*<br />
x t = C − e<br />
⎛ 1 ⎞<br />
− ⎜ ⎟ t<br />
⎝ τ ⎠<br />
⎞<br />
⎟<br />
⎠<br />
<strong>Chapter</strong> 3: <strong>Mechanical</strong> <strong>Systems</strong> 7