CENG 120 Final Exam (Fall, 2001). Open book and notes. Time: 3 h ...
CENG 120 Final Exam (Fall, 2001). Open book and notes. Time: 3 h ...
CENG 120 Final Exam (Fall, 2001). Open book and notes. Time: 3 h ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
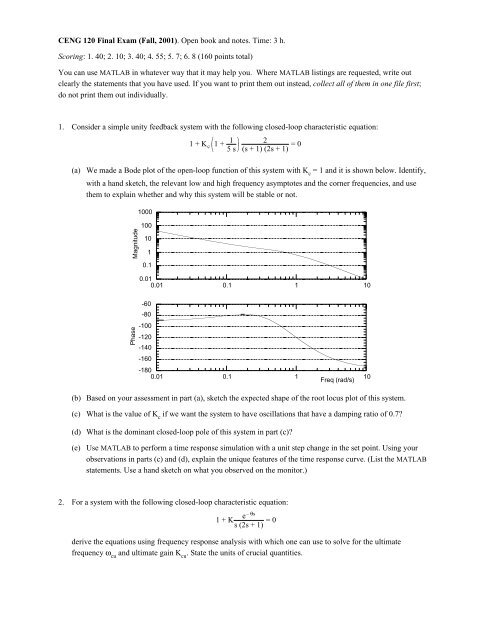
<strong>CENG</strong> <strong>120</strong> <strong>Final</strong> <strong>Exam</strong> (<strong>Fall</strong>, <strong>2001</strong>). <strong>Open</strong> <strong>book</strong> <strong>and</strong> <strong>notes</strong>. <strong>Time</strong>: 3 h.<br />
Scoring: 1. 40; 2. 10; 3. 40; 4. 55; 5. 7; 6. 8 (160 points total)<br />
You can use MATLAB in whatever way that it may help you. Where MATLAB listings are requested, write out<br />
clearly the statements that you have used. If you want to print them out instead, collect all of them in one file first;<br />
do not print them out individually.<br />
1. Consider a simple unity feedback system with the following closed-loop characteristic equation:<br />
1 +K c 1+ 1<br />
5s<br />
2<br />
(s+1)(2s+1) =0<br />
(a) We made a Bode plot of the open-loop function of this system with K c<br />
= 1 <strong>and</strong> it is shown below. Identify,<br />
with a h<strong>and</strong> sketch, the relevant low <strong>and</strong> high frequency asymptotes <strong>and</strong> the corner frequencies, <strong>and</strong> use<br />
them to explain whether <strong>and</strong> why this system will be stable or not.<br />
Magnitude<br />
1000<br />
100<br />
10<br />
1<br />
0.1<br />
0.01<br />
0.01 0.1 1 10<br />
Phase<br />
-60<br />
-80<br />
-100<br />
-<strong>120</strong><br />
-140<br />
-160<br />
-180<br />
0.01 0.1 1<br />
Freq (rad/s)<br />
10<br />
(b) Based on your assessment in part (a), sketch the expected shape of the root locus plot of this system.<br />
(c) What is the value of K c<br />
if we want the system to have oscillations that have a damping ratio of 0.7<br />
(d) What is the dominant closed-loop pole of this system in part (c)<br />
(e) Use MATLAB to perform a time response simulation with a unit step change in the set point. Using your<br />
observations in parts (c) <strong>and</strong> (d), explain the unique features of the time response curve. (List the MATLAB<br />
statements. Use a h<strong>and</strong> sketch on what you observed on the monitor.)<br />
2. For a system with the following closed-loop characteristic equation:<br />
e–<br />
θs<br />
1 +K<br />
s(2s+1) =0<br />
derive the equations using frequency response analysis with which one can use to solve for the ultimate<br />
frequency ω cu<br />
<strong>and</strong> ultimate gain K cu<br />
. State the units of crucial quantities.
3. A control system is shown in the block diagram below. It uses a proportional controller <strong>and</strong> cascade rate<br />
feedback of the manipulated variable.<br />
R<br />
+<br />
–<br />
K c<br />
+<br />
–<br />
1<br />
2s + 1<br />
1<br />
s<br />
C<br />
K 2<br />
(a) For simplicity, take the primary controller gain K c<br />
to be 1. What is the value of the rate feedback gain K 2<br />
that may allow us to have a system response with a damping ratio of 1/√2<br />
(b) With K c<br />
= 1 <strong>and</strong> the value of K 2<br />
obtained in part (a), h<strong>and</strong> sketch the root locus plot of the system.<br />
(c) If we want to sketch the root locus plot of the system while holding K c<br />
constant but varying K 2<br />
as the<br />
parameter, how would we do it What is the probable shape of this root locus plot if K c<br />
= 1 (Hint: We<br />
want to rearrange the closed-loop equation to the form: 1 + K 2<br />
G(s) = 0.)<br />
(d) What is the offset of the system<br />
(e) Under what circumstance is this system stable with respect to K 2<br />
> 0<br />
(f) Do a MATLAB simulation of the closed-loop response with a unit step change in the set point using K c<br />
= 1<br />
<strong>and</strong> the value of K 2<br />
obtained in part (a). (Write out your statements <strong>and</strong> provide a print out with your<br />
solution.)<br />
4. Consider a pressure control loop shown on the right. The<br />
system makes use of the gas inlet stream to maintain a certain<br />
pressure in the vessel. The control loop has a pressure<br />
transducer <strong>and</strong> a controller that sends out a current signal to a<br />
current-to-pressure converter. The I/P converter in turn drives<br />
a pneumatic valve which manipulates the inlet stream flow.<br />
The transfer functions for the pressure vessel <strong>and</strong> the<br />
pneumatic valve are:<br />
G p =<br />
0.2<br />
(0.2s + 1) (0.75s + 1)<br />
PC<br />
I/P<br />
psi<br />
scfm , <strong>and</strong> G v =<br />
± 3<br />
(0.1s + 1)<br />
Inlet Stream<br />
scfm<br />
psi<br />
PT<br />
Outlet Stream<br />
The choice of the action of the valve (i.e., the sign of the steady state gain) is to be determined later. Here we<br />
use American engineering units. So gas flow is in scfm <strong>and</strong> pressure is in psi. The response of the pressure<br />
transducer is extremely fast such that we can neglect its dynamics. It is calibrated for a pressure range of 0 to 30<br />
psi with an output of 4-20 mA. The I/P converter takes in a 4-20 mA input <strong>and</strong> transmits it as 3-15 psi signal to<br />
the pneumatic valve.<br />
(a) We want to design a fail-closed system. Provide the action of each block (i.e., the sign of the steady state<br />
gain in each block). Draw <strong>and</strong> label properly with units the block diagram of the system <strong>and</strong> identify the<br />
sign of the steady state gain in each block, including the controller.<br />
(b) Write down the closed-loop characteristic equation of the system with proper numerical values for all the<br />
steady state gains.<br />
(c) Using either the Routh array or direct substitution (entirely your choice), find the range of proportional gain<br />
that a system with a proportional controller is stable.<br />
(d) For a system with only proportional control, find the ultimate gain with a method of your choice.
(e) For a system with only proportional control, find the proportional gain when the system performance has<br />
oscillations that are equivalent to a damping ratio of 0.7. Identify the dominant pole(s) in this case.<br />
(f) What is the steady state error in part (e)<br />
(g) For a system with only proportional control, find the proportional gain such that the system has a gain<br />
margin of 2. List the MATLAB statements with which you use to calculate this result.<br />
(h) Use direct synthesis to design a controller such that the system response has a damping ratio of 0.7.<br />
(i) Suppose we now do an open-loop step test. On a single plot, compare the full-order model with the firstorder<br />
with dead time approximation for the process reaction curve function. (Provide the statements <strong>and</strong> the<br />
plot.)<br />
(j) On a single plot, compare the closed-loop time responses to a unit step input with different PID controller<br />
settings: (1) Ziegler-Nichols with slight overshoot, (2) ITAE, (3) direct synthesis from part (h), (4) IMC,<br />
<strong>and</strong> (5) Ciacone-Marlin. Use an ideal PID controller in your simulation. (List clearly the controller settings<br />
that you use <strong>and</strong> the MATLAB statements common to all different cases. Provide a copy of the plot.)<br />
5. Show that with a proper choice of K 2<br />
, the following two block diagrams are identical.<br />
(a)<br />
R + 1<br />
C<br />
K c<br />
–<br />
s (2s + 1)<br />
(1 + τ s)<br />
D<br />
(b)<br />
R + + 1 C<br />
K c<br />
–<br />
– s (2s + 1)<br />
K 2<br />
s<br />
6. If the poles of a transfer function are –2 ± j2√3, what are the natural time period <strong>and</strong> damping ratio of this<br />
transfer function