

Robust Weighted Scan Matching with Quadtrees
Robust Weighted Scan Matching with Quadtrees
Robust Weighted Scan Matching with Quadtrees

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
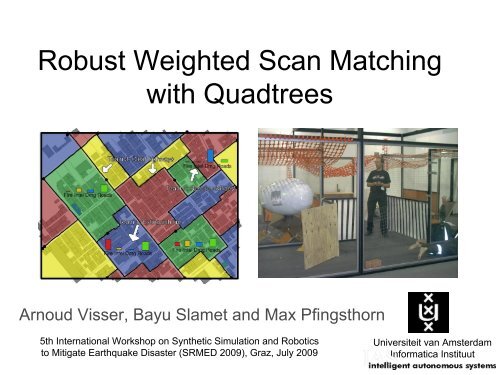
<strong>Robust</strong> <strong>Weighted</strong> <strong>Scan</strong> <strong>Matching</strong><br />
<strong>with</strong> <strong>Quadtrees</strong><br />
Arnoud Visser, Bayu Slamet and Max Pfingsthorn<br />
5th International Workshop on Synthetic Simulation and Robotics<br />
to Mitigate Earthquake Disaster (SRMED 2009), Graz, July 2009<br />
Universiteit van Amsterdam<br />
Informatica Instituut
Virtual Rescue League<br />
Simultaneously:<br />
• Where am I (Localization)<br />
• Where have I been (Mapping)<br />
• Find the victims (Exploration)<br />
• Share this information and<br />
coordinate <strong>with</strong> others<br />
(Distribituted Decision making)
A wide variety of worlds
A wide variety of Robotic platforms
Networked robot team
UsarCommander<br />
• User Interface can be used to teleoperate the<br />
robots and monitor the shared map.<br />
• In our approach, both the robots and the<br />
basestation maintain a distributed map<br />
(each <strong>with</strong> a partial view of the word).
Pose estimation<br />
Pose & confidence<br />
• Several <strong>Scan</strong> <strong>Matching</strong> algorithms
<strong>Scan</strong> matching<br />
• This is a search process, where the<br />
position is estimated by shifting a robot<br />
around, until a measure is minimized
Several algorithms evaluated<br />
• Iterative Dual Correspondence<br />
– Estimate translation from Euclidean distance<br />
– Estimate rotation from Polar distance<br />
• Metric-based Iterative Closest Point<br />
– Estimate translation and rotation from<br />
a combined distance measure<br />
• <strong>Weighted</strong> <strong>Scan</strong> <strong>Matching</strong><br />
– Estimate translation and rotation from Euclidean<br />
distance only, but weight the contribution of each pair<br />
on the correspondence and measurement uncertainty
Correspondence error<br />
Odometry estimate Correspondence error After match
Localization vs Mapping<br />
• When the confidence is good, the current<br />
position fits to one of the positions of the<br />
local submap<br />
(localization, no extension of the map)<br />
• When confidence drops, a new patch is<br />
added to the chain<br />
(graph based mapping)
Chain of patches<br />
π = laser scan<br />
θ = absolute location (Euclidean)<br />
Φ= relation<br />
= relative location (polar) Δθ + covariance matrix Σ
Localization vs Mapping<br />
• Graph based map allows a distributed<br />
approach, which scales well<br />
for multiple robots<br />
• High accuracy maps can be achieved<br />
• Additional data can be added<br />
asynchronously<br />
• Results have been validated<br />
See Max Pfingsthorn, Bayu Slamet and Arnoud Visser, "A Scalable Hybrid Multi-Robot SLAM Method<br />
for Highly Detailed Maps", Lecture Notes on Artificial Intelligence series volume 5001, p. 457-464,<br />
Springer, Berlin Heidelberg New York, July 2008.
Localization vs Mapping<br />
• Graph based map allows a distributed<br />
approach, which scales well<br />
for multiple robots<br />
• High accuracy maps can be achieved<br />
• Additional data can be added<br />
asynchronously<br />
• Results have been validated<br />
See Max Pfingsthorn, Bayu Slamet and Arnoud Visser, "A Scalable Hybrid Multi-Robot SLAM Method<br />
for Highly Detailed Maps", Lecture Notes on Artificial Intelligence series volume 5001, p. 457-464,<br />
Springer, Berlin Heidelberg New York, July 2008.
Remaining Mapping error<br />
IDC<br />
WSM
Not enough reference points<br />
<strong>Scan</strong><br />
time 1 time 2 time 3
Short or long term memory helps<br />
<strong>Scan</strong><br />
time 3 missing section available from time 1
esidual correlation distance<br />
mm<br />
IDC<br />
WSM<br />
Local map (blue) versus global map (red)
<strong>Matching</strong> covariance<br />
mm<br />
IDC<br />
WSM<br />
Local map (black) versus global map (blue)
Remaining Mapping error<br />
Q-IDC<br />
WSM
Q-WSM benefits more<br />
Global map available in quadtree<br />
allows to tighten thresholds
Validation on Radish datasets
Comparison <strong>with</strong> full SLAM<br />
• All results are based<br />
on iterative SLAM<br />
• Results can further<br />
improve<br />
<strong>with</strong> post-processing<br />
the data
Inter League Challenge 2009<br />
Partial map of the Graz 2009 Arena
Conclusion<br />
• The correspondence error can be reduced by<br />
providing a denser matching set<br />
• This provides increased robustness and<br />
accuracy, especially for WSM.<br />
• With a quadtree implementation this can be done<br />
in realtime<br />
2 nd place<br />
BRAZIL OPEN<br />
3rd place<br />
4 th place 1 st place<br />
3rd place
