PID Tuning Guide
PID Tuning Guide
PID Tuning Guide

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Notes on ControlLogix <strong>PID</strong> Algorithms<br />
24<br />
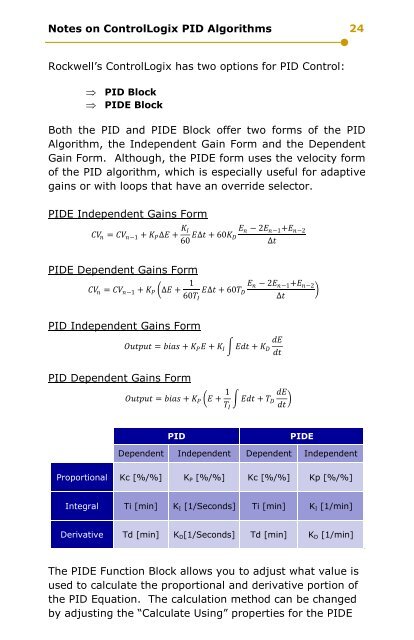
Rockwell’s ControlLogix has two options for <strong>PID</strong> Control:<br />
<strong>PID</strong> Block<br />
<strong>PID</strong>E Block<br />
Both the <strong>PID</strong> and <strong>PID</strong>E Block offer two forms of the <strong>PID</strong><br />
Algorithm, the Independent Gain Form and the Dependent<br />
Gain Form. Although, the <strong>PID</strong>E form uses the velocity form<br />
of the <strong>PID</strong> algorithm, which is especially useful for adaptive<br />
gains or with loops that have an override selector.<br />
<strong>PID</strong>E Independent Gains Form<br />
CV n = CV n−1 + K P ∆E + K I<br />
60 E∆t + 60K E n − 2E n−1 +E n−2<br />
D<br />
∆t<br />
<strong>PID</strong>E Dependent Gains Form<br />
CV n = CV n−1 + K P ∆E + 1<br />
E n − 2E n−1 +E n−2<br />
E∆t + 60T<br />
60T D<br />
I ∆t<br />
<strong>PID</strong> Independent Gains Form<br />
Output = bias + K P E + K I Edt + K D<br />
dE<br />
dt<br />
<strong>PID</strong> Dependent Gains Form<br />
Output = bias + K P E + 1 T I<br />
Edt + T D<br />
dE<br />
dt<br />
<strong>PID</strong><br />
<strong>PID</strong>E<br />
Dependent Independent Dependent Independent<br />
Proportional Kc [%/%] K P [%/%] Kc [%/%] Kp [%/%]<br />
Integral Ti [min] K I [1/Seconds] Ti [min] K I [1/min]<br />
Derivative Td [min] K D [1/Seconds] Td [min] K D [1/min]<br />
The <strong>PID</strong>E Function Block allows you to adjust what value is<br />
used to calculate the proportional and derivative portion of<br />
the <strong>PID</strong> Equation. The calculation method can be changed<br />
by adjusting the ―Calculate Using‖ properties for the <strong>PID</strong>E