10 5 transient response specifications - KFUPM Open Courseware
10 5 transient response specifications - KFUPM Open Courseware
10 5 transient response specifications - KFUPM Open Courseware

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
ME 413 Systems Dynamics & Control<br />
Chapter <strong>10</strong>: Time‐Domain Analysis and Design of Control Systems<br />
or<br />
Thus, the rise<br />
T<br />
r<br />
is<br />
ζ<br />
2<br />
1 − ζ<br />
sinωT + cosωT<br />
= 0<br />
tanω<br />
T<br />
d<br />
r<br />
d<br />
r<br />
d<br />
2<br />
1 − ζ<br />
=−<br />
ζ<br />
r<br />
r<br />
⎛<br />
2<br />
−1 1 − ⎞ π −<br />
1 ζ β<br />
= tan −<br />
=<br />
ω ⎜ ζ ⎟ ω<br />
d<br />
⎝ ⎠<br />
d<br />
T (<strong>10</strong>‐16)<br />
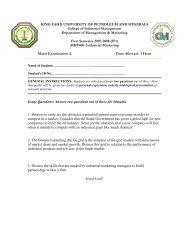
where β is defined in Figure <strong>10</strong>‐25. Clearly to obtain a large value of T<br />
r<br />
we must have a large value<br />
of β .<br />
jω<br />
ωn<br />
2<br />
1−<br />
ζ<br />
−σ<br />
ω n<br />
β<br />
jω d<br />
β = cos<br />
σ<br />
−1<br />
( ζ)<br />
( ζ )<br />
or β = sin 1−<br />
or<br />
β<br />
−1 2<br />
⎛<br />
1−ζ<br />
⎞<br />
ζ ⎟<br />
⎠<br />
2<br />
−1<br />
= tan ⎜ ⎟<br />
⎜<br />
⎝<br />
ζω n<br />
Figure <strong>10</strong>‐25<br />
Definition of angle β<br />
Peak Time. We obtain the peak time T<br />
p<br />
by differentiating c( t ) in Equation (<strong>10</strong>‐13), with<br />
respect to time and letting this derivative equal zero. That is,<br />
dc ( t ) ωn<br />
−ζωn = e<br />
t<br />
sinω<br />
= 0<br />
2<br />
dt<br />
dt 1−<br />
ζ<br />
It follows that<br />
sinω t d<br />
= 0<br />
or<br />
ω t = 0, π, 2 π, 3 π,... = n d<br />
π, n = 0,1,2.....<br />
Since the peak time<br />
T corresponds to the first peak overshoot ( n = 1)<br />
, we have ω T = π<br />
p<br />
π π<br />
= =<br />
ω<br />
2<br />
d ω 1−<br />
ζ<br />
T (<strong>10</strong>‐17)<br />
p<br />
n<br />
d<br />
p<br />
. Then<br />
4/9