10 5 transient response specifications - KFUPM Open Courseware
10 5 transient response specifications - KFUPM Open Courseware
10 5 transient response specifications - KFUPM Open Courseware

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
ME 413 Systems Dynamics & Control<br />
Chapter <strong>10</strong>: Time‐Domain Analysis and Design of Control Systems<br />
Chapter <strong>10</strong>:<br />
Time‐Domain Analysis of and Design<br />
of Control Systems<br />
A. Bazoune<br />
<strong>10</strong>.5 Transient Response Specifications of a Second Order System<br />
Because systems that stores energy cannot respond instantaneously, they exhibit a <strong>transient</strong><br />
<strong>response</strong> when they are subjected to inputs or disturbances. Consequently, the <strong>transient</strong> <strong>response</strong><br />
characteristics constitute one of the most important factors in system design.<br />
In many practical cases, the desired performance characteristics of control systems can be<br />
given in terms of <strong>transient</strong>‐<strong>response</strong> <strong>specifications</strong>. Frequently, such performance characteristics are<br />
specified in terms of the <strong>transient</strong> <strong>response</strong> to unit‐step input, since such an input is easy to generate<br />
and is sufficiently drastic. (If the <strong>response</strong> of a linear system to a step input is known, it is<br />
mathematically possible to compute the system’s <strong>response</strong> to any input).<br />
The <strong>transient</strong> <strong>response</strong> of a system to a unit step‐input depends on initial conditions. For<br />
convenience in comparing the <strong>transient</strong> <strong>response</strong>s of various systems, it is common practice to use<br />
standard initial conditions: The system is at rest initially, with its output and all time derivatives<br />
thereof zero. Then the <strong>response</strong> characteristics can be easily compared.<br />
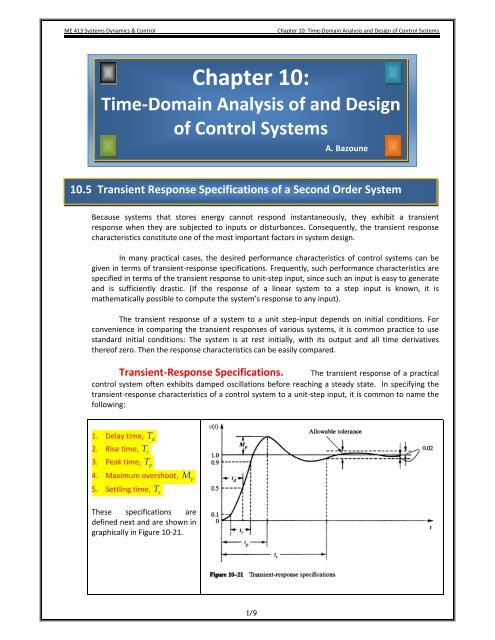
Transient‐Response Specifications.<br />
The <strong>transient</strong> <strong>response</strong> of a practical<br />
control system often exhibits damped oscillations before reaching a steady state. In specifying the<br />
<strong>transient</strong>‐<strong>response</strong> characteristics of a control system to a unit‐step input, it is common to name the<br />
following:<br />
1. Delay time, T<br />
d<br />
2. Rise time, T<br />
r<br />
3. Peak time, T<br />
p<br />
4. Maximum overshoot, M<br />
p<br />
5. Settling time, T<br />
s<br />
These <strong>specifications</strong> are<br />
defined next and are shown in<br />
graphically in Figure <strong>10</strong>‐21.<br />
1/9
ME 413 Systems Dynamics & Control<br />
Chapter <strong>10</strong>: Time‐Domain Analysis and Design of Control Systems<br />
Delay Time. The delay time T<br />
d<br />
is the time needed for the <strong>response</strong> to reach half of its<br />
final value the very first time.<br />
Rise Time. The rise time T<br />
r<br />
is the time required for the <strong>response</strong> to rise from <strong>10</strong>% to<br />
90%, 5% to 95%, or 0% to <strong>10</strong>0% of its final value. For underdamped second order systems, the 0% to<br />
<strong>10</strong>0% rise time is normally used. For overdamped systems, the <strong>10</strong>% to 90% rise time is common.<br />
Peak Time. The peak time T<br />
p<br />
is the time required for the <strong>response</strong> to reach the first peak<br />
of the overshoot.<br />
Maximum (percent Overshoot). The maximum percent overshoot M<br />
p<br />
is the<br />
c ∞ . If<br />
maximum peak value of the <strong>response</strong> curve [the curve of c( t ) versus t ], measured from ( )<br />
c ( ∞ ) = 1, the maximum percent overshoot is M × <strong>10</strong>0% . If the final steady state value ( )<br />
p<br />
c ∞ of<br />
the <strong>response</strong> differs from unity, then it is common practice to use the following definition of the<br />
maximum percent overshoot:<br />
( p ) −C( ∞)<br />
C t<br />
Maximum percent overshoot = × <strong>10</strong>0%<br />
C<br />
Settling Time. The settling time T<br />
s<br />
is the time required for the <strong>response</strong> curve to reach and<br />
stay within 2% of the final value. In some cases, 5% instead of 2%, is used as the percentage of the<br />
final value. The settling time is the largest time constant of the system.<br />
Comments. If we specify the values of<br />
curve is virtually fixed as shown in Figure <strong>10</strong>.22.<br />
T<br />
d<br />
,<br />
T<br />
r<br />
,<br />
T<br />
p<br />
,<br />
( ∞)<br />
T<br />
s<br />
and<br />
M<br />
p<br />
, the shape of the <strong>response</strong><br />
Figure <strong>10</strong>‐22<br />
Specifications of <strong>transient</strong>‐<strong>response</strong> curve.<br />
A Few Comments on Transient Response‐Specifications.<br />
In addition of requiring a dynamic system to be stable, i.e., its <strong>response</strong> does not increase unbounded<br />
with time (a condition that is satisfied for a second order system provided that ζ ≥ 0 , we also<br />
require the <strong>response</strong>:<br />
• to be fast<br />
• does not excessively overshoot the desired value (i.e., relatively stable) and<br />
• to reach and remain close to the desired reference value in the minimum time possible.<br />
2/9
ME 413 Systems Dynamics & Control<br />
Chapter <strong>10</strong>: Time‐Domain Analysis and Design of Control Systems<br />
Second‐Order Systems and Transient‐Response‐Specifications.<br />
The <strong>response</strong> for a unit step input of an underdamped second order system ( 0 ζ 1)<br />
or<br />
ζ −ζω<br />
t<br />
−ζω<br />
t<br />
n<br />
n<br />
c()<br />
t = 1− e sinω<br />
t −e cosω<br />
t<br />
d<br />
d<br />
2<br />
1 − ζ<br />
⎧<br />
−ζω<br />
⎪ ζ<br />
⎫<br />
t<br />
⎪<br />
n<br />
= 1− e ⎨ sinω<br />
t + cosω<br />
t<br />
d<br />
d ⎬<br />
2<br />
⎩⎪<br />
1 − ζ<br />
⎭⎪<br />
e<br />
< < is given by<br />
(<strong>10</strong>‐13)<br />
−ζω<br />
2<br />
1<br />
()<br />
t n<br />
−<br />
c t = 1 − sin ⎨ω<br />
t + tan<br />
d<br />
⎬<br />
(<strong>10</strong>‐14)<br />
2<br />
1 − ζ<br />
⎧⎪<br />
⎩⎪<br />
1 − ζ ⎫⎪<br />
ζ ⎭⎪<br />
A family of curves c( t ) plotted against t with various values of ζ is shown in Figure <strong>10</strong>‐24.<br />
1.6<br />
1.4<br />
ζ = 0.2<br />
Step Response<br />
1.2<br />
0.5<br />
ut ( )<br />
1<br />
0.7<br />
1<br />
1<br />
−−−−− 142 43<br />
Input<br />
t<br />
s<br />
ω<br />
2<br />
n<br />
2 2<br />
+ 2ζ ωns+<br />
ωn<br />
Amplitude<br />
0.8<br />
0.6<br />
0.4<br />
2<br />
5<br />
0.2<br />
0<br />
0 2 4 6 8 <strong>10</strong> 12 14 16 18 20<br />
Output<br />
Time (sec)<br />
144424443<br />
_______________<br />
Figure <strong>10</strong>‐24<br />
Unit step <strong>response</strong> curves for a second order system.<br />
Delay Time. We define the delay time by the following approximate formula:<br />
Rise Time. We find the rise time<br />
r<br />
T<br />
d<br />
1+<br />
07 . ζ<br />
=<br />
ω<br />
n<br />
T by letting cT ( ) 1<br />
r<br />
= in Equation (<strong>10</strong>‐13), or<br />
⎧<br />
−ζω<br />
⎪ ζ<br />
⎫⎪<br />
n r<br />
c( T)<br />
= 1= 1− T<br />
r<br />
e ⎨ sinωT + cosω<br />
d r<br />
T<br />
d r⎬<br />
(<strong>10</strong>‐15)<br />
2<br />
⎩⎪<br />
1 − ζ<br />
⎭⎪<br />
−ζωn Since e<br />
t<br />
≠ 0, Equation (<strong>10</strong>‐15) yields<br />
3/9
ME 413 Systems Dynamics & Control<br />
Chapter <strong>10</strong>: Time‐Domain Analysis and Design of Control Systems<br />
or<br />
Thus, the rise<br />
T<br />
r<br />
is<br />
ζ<br />
2<br />
1 − ζ<br />
sinωT + cosωT<br />
= 0<br />
tanω<br />
T<br />
d<br />
r<br />
d<br />
r<br />
d<br />
2<br />
1 − ζ<br />
=−<br />
ζ<br />
r<br />
r<br />
⎛<br />
2<br />
−1 1 − ⎞ π −<br />
1 ζ β<br />
= tan −<br />
=<br />
ω ⎜ ζ ⎟ ω<br />
d<br />
⎝ ⎠<br />
d<br />
T (<strong>10</strong>‐16)<br />
where β is defined in Figure <strong>10</strong>‐25. Clearly to obtain a large value of T<br />
r<br />
we must have a large value<br />
of β .<br />
jω<br />
ωn<br />
2<br />
1−<br />
ζ<br />
−σ<br />
ω n<br />
β<br />
jω d<br />
β = cos<br />
σ<br />
−1<br />
( ζ)<br />
( ζ )<br />
or β = sin 1−<br />
or<br />
β<br />
−1 2<br />
⎛<br />
1−ζ<br />
⎞<br />
ζ ⎟<br />
⎠<br />
2<br />
−1<br />
= tan ⎜ ⎟<br />
⎜<br />
⎝<br />
ζω n<br />
Figure <strong>10</strong>‐25<br />
Definition of angle β<br />
Peak Time. We obtain the peak time T<br />
p<br />
by differentiating c( t ) in Equation (<strong>10</strong>‐13), with<br />
respect to time and letting this derivative equal zero. That is,<br />
dc ( t ) ωn<br />
−ζωn = e<br />
t<br />
sinω<br />
= 0<br />
2<br />
dt<br />
dt 1−<br />
ζ<br />
It follows that<br />
sinω t d<br />
= 0<br />
or<br />
ω t = 0, π, 2 π, 3 π,... = n d<br />
π, n = 0,1,2.....<br />
Since the peak time<br />
T corresponds to the first peak overshoot ( n = 1)<br />
, we have ω T = π<br />
p<br />
π π<br />
= =<br />
ω<br />
2<br />
d ω 1−<br />
ζ<br />
T (<strong>10</strong>‐17)<br />
p<br />
n<br />
d<br />
p<br />
. Then<br />
4/9
ME 413 Systems Dynamics & Control<br />
Chapter <strong>10</strong>: Time‐Domain Analysis and Design of Control Systems<br />
The peak time T<br />
p<br />
corresponds to one half‐cycle of the frequency damped oscillations.<br />
Maximum Overshoot M<br />
p<br />
The maximum overshoot M<br />
p<br />
occurs at the peak<br />
T = π ω . Thus, from Equation (<strong>10</strong>‐13),<br />
p<br />
d<br />
or<br />
⎧<br />
⎫<br />
n ( d )<br />
Mp<br />
c( Tp)<br />
1 e ζω πω ζ − ⎪<br />
⎪<br />
= − = − ⎨ sinπ + cos<br />
2<br />
{ π ⎬<br />
⎪ 1−ζ<br />
1442443 = −1<br />
⎪<br />
⎩<br />
⎪<br />
= 0<br />
⎭<br />
⎪<br />
p<br />
− 1 − 2<br />
= (<strong>10</strong>‐18)<br />
M e πζ ζ<br />
Since c ( ∞ ) = 1, the maximum percent overshoot is<br />
=<br />
− 1 − 2<br />
×<br />
Mp% e πζ ζ <strong>10</strong>0%<br />
The relationship between the damping ratio ζ and the maximum percent overshoot is shown in<br />
Figure <strong>10</strong>‐26. Notice that no overshoot for ζ ≥ 1 and overshoot becomes negligible for ζ > 07 . .<br />
Figure <strong>10</strong>‐26 Relationship between the maximum percent overshoot M p<br />
% and damping ratio ζ .<br />
Settling Time T<br />
s<br />
Based on 2%criterion the settling time T<br />
s<br />
is defined as:<br />
−<br />
e ζω<br />
nTs<br />
= 002 .<br />
( 002 . ) 4<br />
ln<br />
− ζωnTs = ln ( 002 . ) ⇒ Ts<br />
= ≈<br />
−ζω<br />
ζω<br />
n<br />
n<br />
5/9
ME 413 Systems Dynamics & Control<br />
Chapter <strong>10</strong>: Time‐Domain Analysis and Design of Control Systems<br />
T s<br />
4<br />
ζω<br />
= ( 2%Criterion)<br />
(<strong>10</strong>‐19)<br />
n<br />
Similarly for 5% we can get<br />
3<br />
T s =<br />
ζω<br />
( 5%Criterion)<br />
(<strong>10</strong>‐20)<br />
n<br />
REVIEW AND SUMMARY<br />
TRANSIENT RESPONSE SPECIFICATIONS OF A SECOND ORDER SYSTEM<br />
TABLE 1.<br />
Useful Formulas and Step Response Specifications for the Linear<br />
Second‐Order Model m & x&+ c x&<br />
+ k x = f (t)<br />
where m, c, k constants<br />
2<br />
− c ± c − 4mk<br />
1. Roots<br />
s1,2<br />
=<br />
2m<br />
2. Damping ratio or ζ = c / 2 mk<br />
3. Undamped natural frequency<br />
ω<br />
n<br />
=<br />
2<br />
4. Damped natural frequency<br />
ω d<br />
= ω n<br />
1−ζ<br />
5. Time constant τ = 2 m / c = 1/<br />
ζω<br />
n<br />
if ζ ≤ 1<br />
k<br />
m<br />
6. Stability Property Stable if, and only if, both roots have negative real parts, this occurs if<br />
and only if , m, c, and k have the same sign.<br />
7. Maximum Percent Overshoot: The maximum % overshoot M<br />
p<br />
is the maximum peak value of the<br />
<strong>response</strong> curve.<br />
M p<br />
= <strong>10</strong>0e<br />
2<br />
−πζ / 1−ζ<br />
8. Peak time: Time needed for the <strong>response</strong> to reach the first peak of the overshoot<br />
2<br />
T = π / ω 1−<br />
ζ<br />
9. Delay time: Time needed for the <strong>response</strong> to reach 50% of its final value the first time<br />
1+<br />
0.<br />
7ζ<br />
Td<br />
≈<br />
ω<br />
p<br />
n<br />
<strong>10</strong>. Settling time: Time needed for the <strong>response</strong> curve to reach and stay within 2% of the final value<br />
4<br />
Ts<br />
=<br />
ζω<br />
n<br />
11. Rise time: Time needed for the <strong>response</strong> to rise from (<strong>10</strong>% to 90%) or (0% to <strong>10</strong>0%) or (5% to 95%) of<br />
π − β<br />
its final value Tr<br />
= (See Figure <strong>10</strong>‐25)<br />
ω<br />
d<br />
n<br />
6/9
ME 413 Systems Dynamics & Control<br />
Chapter <strong>10</strong>: Time‐Domain Analysis and Design of Control Systems<br />
SOLVED PROBLEMS<br />
█ Example 1<br />
Figure 4‐20 (for Example 1)<br />
7/9
ME 413 Systems Dynamics & Control<br />
Chapter <strong>10</strong>: Time‐Domain Analysis and Design of Control Systems<br />
█ Example 2<br />
Figure 4‐21 (for Example 2)<br />
█<br />
Solution<br />
First The transfer function of the system is<br />
8/9
ME 413 Systems Dynamics & Control<br />
Chapter <strong>10</strong>: Time‐Domain Analysis and Design of Control Systems<br />
█ Example 3 (Example <strong>10</strong>‐2in the Textbook Page 520‐521)<br />
T<br />
d<br />
,<br />
Determine the values of<br />
subject to a unit step input<br />
T<br />
r<br />
,<br />
T<br />
p<br />
,<br />
T<br />
s<br />
when the control system shown in Figure <strong>10</strong>‐28 is<br />
Rs ( )<br />
1<br />
s ( s + 1)<br />
C( s)<br />
Figure <strong>10</strong>‐28<br />
Control System<br />
█<br />
Solution<br />
The closed‐loop transfer function of the system is<br />
1<br />
C( s)<br />
s( s+<br />
1)<br />
1<br />
= =<br />
2<br />
R( s)<br />
1<br />
1+<br />
s + s+<br />
1<br />
s s+<br />
1<br />
( )<br />
Notice that ω<br />
n<br />
= 1 rad/s and ζ = 05 . for this system. So<br />
Rise Time.<br />
T<br />
r<br />
π − β<br />
=<br />
ω<br />
where<br />
−1 −<br />
β = sin ( ω ) 1 d<br />
ωn<br />
= sin ( 0. 866 1)<br />
= 1.<br />
05rad<br />
or<br />
−1 −1 −<br />
β = cos ( ζω ) cos ( ) cos<br />
1 n<br />
ωn<br />
= ζ = ( 05 . )<br />
= <strong>10</strong>5 . rad<br />
Therfore,<br />
π −1.05<br />
T<br />
r<br />
= = 2.41 s<br />
0.866<br />
π π<br />
Peak Time. Tp<br />
= = = 363 . s<br />
ωd<br />
0.<br />
866<br />
Delay Time.<br />
1+<br />
0.<br />
7ζ<br />
1+<br />
0. 7( 0.<br />
5)<br />
Td<br />
= = = 135 . s<br />
ω 1<br />
n<br />
d<br />
ωn<br />
ω = ω − ζ = − =<br />
d<br />
2<br />
1−<br />
ζ<br />
Maximum Overshoot : Mp<br />
= e e e<br />
4 4<br />
Settling time: Ts<br />
= = = 8s<br />
ζω 05 . × 1<br />
n<br />
−σ<br />
n<br />
2 2<br />
1 1 0. 5 0.<br />
866<br />
ω n<br />
β<br />
ζω n<br />
jω<br />
jω d<br />
−πζ 1−ζ 2 − π× 05 . 1−05<br />
. 2<br />
−181<br />
.<br />
= = = =<br />
σ<br />
0. 163 16. 3%<br />
9/9