Absolute stability conditions for some scalar nonlinear time-delay ...
Absolute stability conditions for some scalar nonlinear time-delay ...
Absolute stability conditions for some scalar nonlinear time-delay ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Absolute</strong> <strong>stability</strong> <strong>conditions</strong> <strong>for</strong> <strong>some</strong> <strong>scalar</strong><br />
<strong>nonlinear</strong> <strong>time</strong>-<strong>delay</strong> systems with monotone<br />
increasing <strong>nonlinear</strong>ity ⋆<br />
Daniela Danciu ∗<br />
∗ Department of Automatic Control, University of Craiova, A.I.Cuza, 13,<br />
Craiova, RO-200585, Romania (e-mail: daniela@automation.ucv.ro).<br />
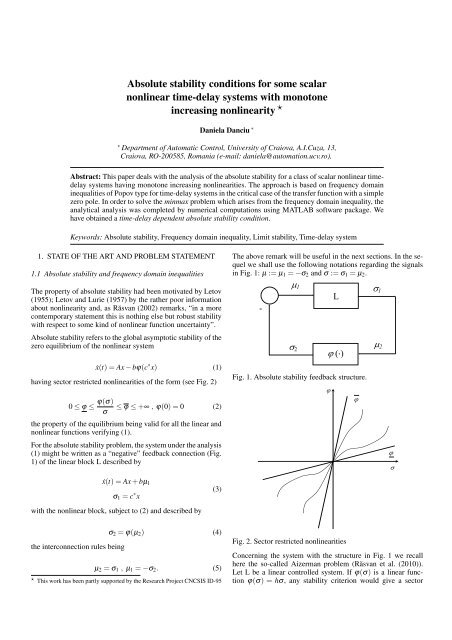
Abstract: This paper deals with the analysis of the absolute <strong>stability</strong> <strong>for</strong> a class of <strong>scalar</strong> <strong>nonlinear</strong> <strong>time</strong><strong>delay</strong><br />
systems having monotone increasing <strong>nonlinear</strong>ities. The approach is based on frequency domain<br />
inequalities of Popov type <strong>for</strong> <strong>time</strong>-<strong>delay</strong> systems in the critical case of the transfer function with a simple<br />
zero pole. In order to solve the minmax problem which arises from the frequency domain inequality, the<br />
analytical analysis was completed by numerical computations using MATLAB software package. We<br />
have obtained a <strong>time</strong>-<strong>delay</strong> dependent absolute <strong>stability</strong> condition.<br />
Keywords: <strong>Absolute</strong> <strong>stability</strong>, Frequency domain inequality, Limit <strong>stability</strong>, Time-<strong>delay</strong> system<br />
1. STATE OF THE ART AND PROBLEM STATEMENT<br />
1.1 <strong>Absolute</strong> <strong>stability</strong> and frequency domain inequalities<br />
The above remark will be useful in the next sections. In the sequel<br />
we shall use the following notations regarding the signals<br />
in Fig. 1: µ := µ 1 = −σ 2 and σ := σ 1 = µ 2 .<br />
The property of absolute <strong>stability</strong> had been motivated by Letov<br />
(1955); Letov and Lurie (1957) by the rather poor in<strong>for</strong>mation<br />
about <strong>nonlinear</strong>ity and, as Răsvan (2002) remarks, “in a more<br />
contemporary statement this is nothing else but robust <strong>stability</strong><br />
with respect to <strong>some</strong> kind of <strong>nonlinear</strong> function uncertainty”.<br />
<strong>Absolute</strong> <strong>stability</strong> refers to the global asymptotic <strong>stability</strong> of the<br />
zero equilibrium of the <strong>nonlinear</strong> system<br />
ẋ(t) = Ax − bϕ(c ∗ x) (1)<br />
having sector restricted <strong>nonlinear</strong>ities of the <strong>for</strong>m (see Fig. 2)<br />
0 ≤ ϕ ≤ ϕ(σ)<br />
σ<br />
≤ ϕ ≤ +∞ , ϕ(0) = 0 (2)<br />
the property of the equilibrium being valid <strong>for</strong> all the linear and<br />
<strong>nonlinear</strong> functions verifying (1).<br />
For the absolute <strong>stability</strong> problem, the system under the analysis<br />
(1) might be written as a “negative” feedback connection (Fig.<br />
1) of the linear block L described by<br />
Fig. 1. <strong>Absolute</strong> <strong>stability</strong> feedback structure.<br />
<br />
<br />
<br />
<br />
ẋ(t) = Ax + bµ 1<br />
σ 1 = c ∗ x<br />
with the <strong>nonlinear</strong> block, subject to (2) and described by<br />
(3)<br />
σ 2 = ϕ(µ 2 ) (4)<br />
the interconnection rules being<br />
µ 2 = σ 1 , µ 1 = −σ 2 . (5)<br />
⋆ This work has been partly supported by the Research Project CNCSIS ID-95<br />
Fig. 2. Sector restricted <strong>nonlinear</strong>ities<br />
Concerning the system with the structure in Fig. 1 we recall<br />
here the so-called Aizerman problem (Răsvan et al. (2010)).<br />
Let L be a linear controlled system. If ϕ(σ) is a linear function<br />
ϕ(σ) = hσ, any <strong>stability</strong> criterion would give a sector
h ∈ (ϕ H<br />
,ϕ H ) called the Hurwitz sector which, corresponding to<br />
the necessary and sufficiently <strong>stability</strong> <strong>conditions</strong>, is thus maximal.<br />
If, on the other hand, one considers <strong>nonlinear</strong> functions<br />
verifying (2), then only sufficient global <strong>stability</strong> <strong>conditions</strong><br />
can be obtained (generally speaking) and the resulting maximal<br />
sector will be, as a rule, more narrow than the Hurwitz sector.<br />
The comparison of the two sectors is the Aizerman problem:<br />
the closer they are, the less is the “degree of conservatism”<br />
obtained via the available sufficient <strong>conditions</strong> of absolute <strong>stability</strong><br />
(among which the frequency domain inequalities together<br />
with the Liapunov functions and the Linear Matrix Inequalities<br />
associated to them are the less conservative).<br />
According to Lefschetz (1965), the development of the absolute<br />
<strong>stability</strong> theory has known two periods: the pre-Popov period<br />
and Popov period that started after 1960. Regarding the second<br />
period, this is marked by the frequency domain inequalities<br />
used <strong>for</strong> analyzing the <strong>stability</strong> of <strong>nonlinear</strong> systems. These<br />
were introduced by the Romanian scientist V. M. Popov in his<br />
pioneering paper (Popov (1959)) and became known worldwide<br />
especially after his seminal paper (Popov (1961)).<br />
For the goal of the paper we shall introduce here the absolute<br />
<strong>stability</strong> result based on frequency domain inequality of Popovtype<br />
<strong>for</strong> <strong>time</strong>-<strong>delay</strong> systems in the critical case of a zero root<br />
(a straight<strong>for</strong>ward extension of the Theorem 6.1 in Răsvan<br />
(1975)).<br />
Theorem 1. Consider the control system described by<br />
ẋ(t) = Ax(t) +<br />
σ(t) = c ′ 0x(t) +<br />
r<br />
∑<br />
1<br />
r<br />
∑<br />
1<br />
B k x(t − τ k ) + b 0 ξ (t) +<br />
˙ξ (t) = −ϕ(σ(t)),<br />
c ′ k x(t − τ k) + γ 0 ξ (t) +<br />
r<br />
∑<br />
1<br />
r<br />
∑<br />
1<br />
b k ξ (t − τ k ),<br />
γ k ξ (t − τ k )<br />
where ϕ(σ) is a continuous <strong>nonlinear</strong>ity verifying the <strong>conditions</strong>:<br />
0 < ϕ(σ)<br />
σ<br />
(6)<br />
< k ≤ +∞ , ϕ(0) = 0. (7)<br />
One supposes that the characteristic equation<br />
det<br />
(<br />
sI − A −<br />
has all its roots within C − , and<br />
γ 0 +<br />
r<br />
∑<br />
1<br />
γ i −<br />
(<br />
c ′ 0 +<br />
r<br />
∑c ′ j<br />
1<br />
)(<br />
r<br />
∑<br />
1<br />
A +<br />
B k e −sτ k<br />
r<br />
∑<br />
1<br />
If there exists q ≥ 0 finite such that<br />
where<br />
)<br />
B k<br />
) −1 (b 0 +<br />
= 0 (8)<br />
r<br />
∑<br />
1<br />
b l<br />
)<br />
> 0.<br />
(9)<br />
1<br />
+ Re (1 + ıωq)H(ıω) ≥ 0, (10)<br />
k<br />
H(s) = 1 s<br />
(<br />
[<br />
sI − A −<br />
γ 0 +<br />
r<br />
∑<br />
1<br />
r<br />
∑<br />
1<br />
B k e −sτ k<br />
γ i e −sτ i<br />
+<br />
) −1 (<br />
(<br />
c ′ 0 +<br />
b 0 +<br />
r<br />
∑<br />
1<br />
r<br />
∑<br />
1<br />
c ′ je −sτ j<br />
)<br />
·<br />
b l e −sτ l<br />
) ⎤ ⎦,<br />
(11)<br />
then the system (6) is asymptotic stable <strong>for</strong> every <strong>nonlinear</strong>ity<br />
within the class above defined.<br />
Remark 2. The Theorem 1 ensures absolute <strong>stability</strong> <strong>for</strong> all<br />
<strong>nonlinear</strong>ities which verify (7), yielding the absolute <strong>stability</strong><br />
sector (0,k) which can be compared with the Hurwitz sector in<br />
the Aizerman problem; the fulfilment of the frequency domain<br />
inequality (10) will give the “dimension” of the absolute <strong>stability</strong><br />
sector. The inequality (9) ensures the limit <strong>stability</strong> property<br />
of the linear block in the critical case considered and, is similarly<br />
to the condition (12) in Theorem 4 from the subsection<br />
Limit <strong>stability</strong> property which will follow. The equation (11) is<br />
nothing else that the transfer function of the system (6).<br />
1.2 The limit <strong>stability</strong> property<br />
In connection with absolute <strong>stability</strong> and Aizerman problem<br />
is the limit <strong>stability</strong> property - introduced by Aizerman and<br />
Gantmakher (1963). Consider again the systems having the<br />
structure in Fig. 1 and suppose that the <strong>nonlinear</strong> function is<br />
known with <strong>some</strong> uncertainty. As already said, we call absolute<br />
<strong>stability</strong> a robust version of the <strong>stability</strong> property, i.e. the<br />
<strong>stability</strong> of the zero equilibrium <strong>for</strong> all <strong>nonlinear</strong> and linear<br />
function within the sector (0,k) and belonging to a certain<br />
class of functions. For ensuring the absolute <strong>stability</strong> property, a<br />
necessary and minimal condition would be exponential <strong>stability</strong><br />
<strong>for</strong> a single linear function of the sector. In particular, if L<br />
defines an exponentially stable linear system, the property<br />
(called by Popov (1973) minimal <strong>stability</strong>) holds <strong>for</strong> ϕ(σ) ≡ 0.<br />
But if L is in a critical case i.e. it has the spectrum in C − as<br />
well as on ıR a necessary (and minimal) requirement would be<br />
exponential <strong>stability</strong> <strong>for</strong> ϕ(σ) = εσ with 0 < ε < ε 0 and ε 0 > 0<br />
arbitrarily small. This is called limit <strong>stability</strong> and is in fact a<br />
property of the linear block L; the rigorous definition would be<br />
as follows<br />
Definition 3. Let L be a linear dynamical block described by<br />
<strong>some</strong> input/output operator - a convolution (in the <strong>time</strong> domain)<br />
or a transfer function (in the complex domain) - connecting<br />
the input µ to the output σ. System L is said to have the<br />
limit <strong>stability</strong> property if it is output stabilizable by the output<br />
feedback µ = −εσ with 0 < ε < ε 0 and ε 0 > 0 arbitrarily small.<br />
There are known necessary and sufficient <strong>conditions</strong> <strong>for</strong> limit<br />
<strong>stability</strong> <strong>for</strong> linear block L associated to a strictly proper rational<br />
transfer function - see Aizerman and Gantmakher (1963). They<br />
were extended to “the <strong>delay</strong> case”, i.e. to linear blocks whose<br />
transfer functions are strictly proper meromorphic functions<br />
defined by a ratio of quasi-polynomials; <strong>for</strong> the sake of the<br />
completeness, we shall give in the sequel the main result <strong>for</strong><br />
this case (Răsvan (1975)).<br />
Theorem 4. Consider a linear block with the transfer function<br />
H(s) = N(s)/D(s) where N(s) and D(s) are quasi-polynomials,<br />
H(s) being strictly proper in the sense that the degree of the<br />
principal term of D(s) is larger than that of N(s) and assume<br />
D(s) to have at most a finite number of roots on ıR, the other<br />
roots being in C − . For the limit <strong>stability</strong> of this system it<br />
is necessary and sufficient that the multiplicity of each pole<br />
should be at most 2 and the following <strong>conditions</strong> hold <strong>for</strong> it
a) <strong>for</strong> a simple zero pole<br />
Res H(s)| s=0 > 0 (12)<br />
b) <strong>for</strong> a simple non-zero pole, if the Laurent expansion is<br />
considered<br />
Re H(ıω) =<br />
e −1<br />
+ d 0 − e 1 (ω − ω 0 )−<br />
ω − ω 0<br />
−d 2 (ω − ω 0 ) 2 + ...<br />
Im H(ıω) = −d −1<br />
ω − ω 0<br />
+ e 0 + d 1 (ω − ω 0 )−<br />
−e 2 (ω − ω 0 ) 2 + ...<br />
(13)<br />
and the sequence: d −1 ; e −1 e 0 ; −d 1 ; −e 1 e 2 ; d 3 ; ... is associated,<br />
either d −1 ≠ 0 or e −1 ≠ 0 and the first non-zero term of the<br />
above sequence should be strictly positive;<br />
c) <strong>for</strong> a double zero root, if the Laurent expansion is considered<br />
Re H(ıω) = −d −2<br />
ω 2 + d 0 − d 2 ω 2 + ...<br />
Im H(ıω) = −d −1<br />
ω + d 1ω − d 3 ω 2 + ...<br />
(14)<br />
and the sequence −d −1 ; d 1 ; −d 3 ; ... is associated, then i)<br />
d −2 > 0 and ii) the first non-zero term of the sequence should<br />
be strictly negative;<br />
d) <strong>for</strong> a double non-zero root, if the Laurent expansion is<br />
considered<br />
−d −2<br />
Re H(ıω) =<br />
(ω − ω 0 ) 2 − e −1<br />
+ d 0 −<br />
ω − ω 0<br />
−e 1 (ω − ω 0 ) − ...<br />
−e −2<br />
Im H(ıω) =<br />
(ω − ω 0 ) 2 − d −1<br />
+ e 0 +<br />
ω − ω 0<br />
+d 1 (ω − ω 0 ) − ...<br />
(15)<br />
and the sequence d −1 ; −e 2 0 ; −d 1; −e 2 2 ; ... is associated, then<br />
i) d −2 > 0, e −2 = 0 and ii) the first non-zero element of the<br />
sequence should be strictly positive.<br />
Within the theorem the notion “principal term” is used in the<br />
sense of Pontryagin: if<br />
h(z,w) = ∑ a mn z m w n<br />
m,n<br />
is a polynomial in two variables, a rs z r w s is the principal term of<br />
the polynomial if a rs ≠ 0 and <strong>for</strong> any other term with a mn ≠ 0<br />
one of the following is possible: i) r > m, s > n; ii) r = m, s > n;<br />
iii) r > m, s = n. Note that any quasi-polynomial may be given<br />
the <strong>for</strong>m h(z,e z ) with h(z,w) a polynomial in two variables.<br />
1.3 The mathematical model and the problem statement<br />
where ψ(·) is a monotone increasing <strong>nonlinear</strong>ity, τ > 0 is a<br />
constant <strong>time</strong>-<strong>delay</strong> and the initial condition x(θ) = ϕ(θ), <strong>for</strong><br />
θ ∈ [−τ,0], where ϕ ∈ C (−τ,0;R).<br />
The differential equation (16) may model, <strong>for</strong> instance, the fluid<br />
dynamics in high-per<strong>for</strong>mance networks. We refer here to the<br />
mathematical model proposed in Kelly (2001) <strong>for</strong> describing<br />
the rate control algorithm in order to avoid the congestion in<br />
communication networks. Considering the case when a collection<br />
of flows uses a single resource and shares the same gain<br />
parameter K, the model of Kelly (2001) reads as<br />
ẏ(t) = K[w − y(t − τ)p(y(t − τ))] , K > 0 , w > 0 (17)<br />
where τ > 0, assumed constant, represents the round-trip <strong>time</strong><br />
and p(·) can be viewed as “the probability a packet produces a<br />
congestion indication signal”, thus being “positive, continuous,<br />
strictly increasing function of y and bounded above by unity”<br />
(Kelly (2001)).<br />
We shall turn now to the mathematical model (16). Let x be<br />
the unique equilibrium of (16), thus verifying a = bψ(x)x.<br />
Using a change of the coordinates, ξ = x − x, one can shift the<br />
equilibrium point x to the origin so that the system (16) can be<br />
written into the <strong>for</strong>m:<br />
where the <strong>nonlinear</strong> function<br />
verifies the <strong>conditions</strong><br />
˙ξ = −bφ(ξ (t − τ)) (18)<br />
φ(ξ ) = ψ(x + ξ )(x + ξ ) − ψ(x)x. (19)<br />
φ(0) = 0 , φ(ξ )<br />
ξ<br />
> 0. (20)<br />
Instead (18), we shall consider - without loss of the generality -<br />
the <strong>nonlinear</strong> system<br />
˙ξ = −φ(ξ (t − τ)) (21)<br />
with τ > 0 and ξ (θ) = χ(θ), <strong>for</strong> θ ∈ [−τ,0], where χ ∈<br />
C (−τ,0;R).<br />
The aim of this paper is to obtain <strong>conditions</strong> <strong>for</strong> absolute<br />
<strong>stability</strong> of the class of systems described by (21), where the<br />
<strong>nonlinear</strong>ity φ(·) is a monotone increasing function verifying<br />
(20).<br />
2. THE ABSOLUTE STABILITY RESULT<br />
2.1 The frequency domain condition<br />
Following the absolute <strong>stability</strong> approach which is described in<br />
section I, the system (21) can be written as a negative feedback<br />
connection of the linear block<br />
Consider the class of <strong>scalar</strong> <strong>nonlinear</strong> <strong>time</strong>-<strong>delay</strong> systems described<br />
by<br />
ẋ(t) = a − bx(t − τ)ψ(x(t − τ)) , a > 0 , b > 0 (16)<br />
˙ξ (t) = µ(t)<br />
σ(t) = ξ (t − τ)<br />
with a <strong>nonlinear</strong> one, the interconnection rule being<br />
(22)
µ(t) = −φ(σ(t)). (23)<br />
On the other hand, the system (21) is of the <strong>for</strong>m (6) with<br />
A = b 0 = c 0 = γ 0 = 0 and B k = b k = c k = 0 <strong>for</strong> k = 1,r,<br />
γ 1 := γ = 1. In both cases the transfer function of the linear<br />
block results<br />
H(s) = e−τs<br />
, (24)<br />
s<br />
and one remarks the system is in the critical case a) of the<br />
Theorem 4: a simple zero pole. It can be easily seen that the<br />
linear block has the limit <strong>stability</strong> property since<br />
Res H(s)| s=0 = 1 > 0 (25)<br />
or, equivalent, it is verified the condition (9).<br />
The frequency domain inequality (10) is written in our case as<br />
1<br />
+ Re (1 + ıωθ)e−ıωτ<br />
k ıω = 1 (<br />
k + θ cosωτ − sinωτ )<br />
> 0<br />
ω<br />
(26)<br />
and, dividing by τ > 0 one obtains<br />
1<br />
+ θ 0 cosλ − sinλ > 0 , ∀λ > 0 (27)<br />
k 0 λ<br />
where we denoted λ := ωτ, θ 0 := θ τ and k 0 := kτ. The inequality<br />
(27) can be written as a minimax problem<br />
Let<br />
(<br />
max min θ 0 cosλ − sinλ )<br />
> − 1 . (28)<br />
θ 0 ≥0 λ≥0<br />
λ k 0<br />
f (λ) = θ 0 cosλ − sinλ<br />
λ<br />
, ∀λ > 0 (29)<br />
be the function under evaluation. On can see that f (0) = θ 0 −<br />
1 and the condition f (0) > −<br />
k 1 0<br />
will give θ 0 > 1 −<br />
k 1 0<br />
. For<br />
λ d → ∞ and λ d = nπ the most unfavorable case is cosλ d = −1<br />
and f (λ d ) = −θ 0 > −<br />
k 1 0<br />
gives θ 0 <<br />
k 1 0<br />
. We have obtained the<br />
general boundary <strong>conditions</strong>:<br />
1 − 1 k 0<br />
< θ 0 < 1 k 0<br />
(30)<br />
and one can see that the alternate sign of the function impose<br />
as necessary the condition k 0 < ∞. Also, one remarks the<br />
inequality (30) shows that the larger θ 0 is the smaller is k 0 and<br />
as a consequence the narrow is the absolute <strong>stability</strong> sector.<br />
A summary analysis shows that the interval (0,π) is interesting<br />
<strong>for</strong> the variation of function f . First of all, one observes that the<br />
second term in (29) is the function sinc(λ) = sinλ/λ whose<br />
principal lobe has positive values on (0,π/2) and due to the<br />
minus sign it has a unfavorable influence <strong>for</strong> our minimax<br />
problem. On the other hand, <strong>for</strong> λ ∈ (π/2,π) both terms of the<br />
function have negative values. Evaluating f (π/2) = −2/π ><br />
−1/k 0 , ∀θ 0 we obtain an estimation <strong>for</strong> k 0 :<br />
1 − 1 k 0<br />
< 1 − 2 π < 2 π < − 1 k 0<br />
. (31)<br />
2.2 The analysis of the function on intervals<br />
Concerning the minimax problem, the general analysis of the<br />
function and its derivative<br />
f ′ λ cosλ − sinλ<br />
(λ) = −θ 0 sinλ −<br />
λ 2 (32)<br />
leads to the following remarks:<br />
• λ = nπ: f (nπ) = (−1) n θ 0 which shows again that θ 0<br />
cannot be too large since <strong>for</strong> n = (2p + 1), p = 0,1,...<br />
it would give a more restrictive condition <strong>for</strong> the absolute<br />
<strong>stability</strong> sector: k 0 <<br />
θ 1 0<br />
.<br />
• λ = n<br />
2 π : f ((2p + 1)π + 2 π ) > 0 and it is not important <strong>for</strong><br />
the problem; f (2pπ +<br />
2 π ) = − 1<br />
2pπ+ 2<br />
π < 0 and the smallest<br />
value (having the maximum modulus) is f (<br />
2 π ) = − 2 π .<br />
A. Consider now the interval λ ∈ (0,π).<br />
a) lim λ→0+ f ′ (λ) = 0 which means λ = 0 is an extremum.<br />
Making use of Taylor expansion we obtain f ′ (λ) = (<br />
3 1 −θ 0)λ +<br />
o(λ 2 ) and we deduce that on (0,π): i) if 0 ≤ θ 0 < 1 3 then λ = 0<br />
is a minimum and ii) if θ 0 > 1 3<br />
then λ = 0 is a maximum.<br />
b) Evaluating the derivative in λ =<br />
2 π we obtain an other point<br />
4<br />
of interest <strong>for</strong> our analysis on θ 0 : . For θ<br />
π 2 0 = 4 , f ( π π 2 2 ) = − 2 π<br />
is a minimum on (0,π) and f is strictly increasing <strong>for</strong> θ 0 < 4<br />
π 2<br />
and decreasing otherwise.<br />
We thus have obtained the following intervals of interest <strong>for</strong> θ 0<br />
when λ ∈ (0,π):<br />
• θ 0 ∈ (0, 1 3 ): f (0) = θ 0 − 1 < 2 3<br />
is a minimum on (0,π).<br />
• θ 0 ∈ (<br />
3 1, 4 ): f (0) is a maximum on (0,π) and there exists<br />
π 2<br />
a minimum in (0,<br />
2 π ), then the function rises; f (π) =<br />
−θ 0 < 0; f ′ (π) = 1 π > 0, ∀θ 0.<br />
• θ 0 ∈ ( 4 ,∞): the minimum on (0,π) is within the interval<br />
π 2<br />
(<br />
2 π ,π) and f (λ 0) < − 2 π .<br />
B. The analysis on the intervals (2pπ,(2p + 1)π), p = 1,2,...<br />
gives the following conclusions:<br />
1<br />
• θ 0 <<br />
(2pπ+ 2 π < 1 )2 3<br />
: f has a negative minimum within the<br />
interval (2pπ,2pπ +<br />
2 π ).<br />
1<br />
• θ 0 ><br />
(2pπ+ 2 π : f has a negative minimum within the<br />
)2<br />
interval (2pπ +<br />
2 π ,(2p + 1)π).<br />
C. On the intervals ((2p + 1)π,(2p + 2)π), p = 1,2,... the<br />
extremum points are positive maxima and, are not of interest<br />
<strong>for</strong> our analysis.<br />
We conclude that the intervals of interest <strong>for</strong> checking the<br />
minima have the general <strong>for</strong>m<br />
λ ∈ (2pπ,(2p + 1)π), p = 0,1,.... (33)<br />
Let λ p be the solution of f ′ (λ) = 0 on such an interval; it<br />
verifies also
λ p<br />
tanλ p =<br />
1 − θ 0 λp<br />
2<br />
and one can compute the minimum on the interval<br />
f (λ p ) = [ θ 0 (1 − θ 0 λ 2 p) ] sinλ<br />
λ<br />
(34)<br />
< 0 (35)<br />
Since on such intervals sinc(λ) > 0, it results that <strong>for</strong> p ≥ 1 this<br />
minimum is negative no matter where it is placed: either within<br />
the first or second half of the interval.<br />
We can estimate now that the larger θ 0 > 0 is the smaller<br />
the negative minimum will be. This means that θ 0 cannot be<br />
increased too much since the minimax problem requires the<br />
maximization of the minima with respect to θ 0 .<br />
2.3 The analysis of the local minima on intervals<br />
The sequence of the local minima is defined by the equation<br />
(1 − θ 0 λ 2 )sinλ − λ cosλ = 0 (36)<br />
with the solution defined by (34) and the value of a local<br />
minimum<br />
f (λ p ) =<br />
(<br />
θ 0 +<br />
)<br />
1<br />
θ 0 λp 2 cosλ p . (37)<br />
− 1<br />
The analysis on each interval of interest <strong>for</strong> θ 0 , namely those<br />
we have found in section 2.2 (A and B), is simple but tediously.<br />
It reveals that the function of the minima is the same in all cases<br />
and has the general <strong>for</strong>m<br />
g(x) = − 1 + θ 0(θ 0 x − 1)<br />
√<br />
(θ0 x − 1) 2 + x<br />
where x = λ 2 p ≥ 0. The derivative of the “minima” function<br />
gives the extremum point at<br />
which means θ 0 ≥ 1 3 .<br />
One has thus to solve<br />
g ′ (x) = − (3θ 0 − 1) − θ 2 0 x<br />
2[(θ 0 x − 1) 2 + x] 3 2<br />
x = (3θ 0 − 1)<br />
θ 2 0<br />
⎧<br />
⎫<br />
⎨<br />
max<br />
θ 0 ≥ 3<br />
1 ⎩ − 1 + θ 0(θ 0 λ0 2 √<br />
− 1) ⎬<br />
(θ 0 λ0 2 − 1)2 + λ0<br />
2 ⎭<br />
(38)<br />
(39)<br />
≥ 0, (40)<br />
(41)<br />
where λ 0 is the zero of (36) <strong>for</strong> a choice of θ 0 . One can use <strong>for</strong><br />
this purpose the mathematical software packages.<br />
The significant local minima of the function f , computed by<br />
using MATLAB software <strong>for</strong> θ 0 ≥ 1 3<br />
are given in Table 1.<br />
Fig. 3 and Fig. 4 (the zoom in on (0,π)) show the graphical<br />
representations of f (λ) <strong>for</strong> both cases θ 0 ∈ [ 1 3 , 4 ] and θ<br />
π 2 0 > 4 .<br />
π 2<br />
One can observe that, as we previously have estimated, the<br />
values of minima decrease when θ 0 increases. On the other<br />
hand, it can be seen that <strong>for</strong> any of these functions the smallest<br />
minimum is within the interval (0,π). In order to solve (41) we<br />
have thus to find the maximum of these absolute minima on<br />
(0,π). The curve of the absolute minima of f (λ) with respect<br />
to θ 0 is illustrated in Fig. 5; also, the significant values are in<br />
Table I. We conclude that <strong>for</strong> the case θ 0 ∈ ( 1 3<br />
,∞), the minimum<br />
we search <strong>for</strong> is f min = −0.64968 obtained <strong>for</strong> θ 0 = 0.38.<br />
Fig. 6 shows the curves of f (λ) <strong>for</strong> θ 0 ∈ [0, 1 3<br />
) (the negative<br />
value of θ 0 is taken from curiosity). These confirm that the<br />
absolute minimum is in this case λ = 0 ∈ [0,π). But <strong>for</strong> this<br />
case we have already obtained that f (0) = g(0) = θ 0 − 1 ∈<br />
[−1,− 2 3 ), thus the maximum “absolute minimum” <strong>for</strong> θ 0 ∈<br />
[0, 1 3<br />
) is less than −0.64968, the value of the minimum <strong>for</strong><br />
θ 0 ∈ ( 1 3 ,∞).<br />
We conclude that the solution of the minimax problem (28) is<br />
−0.64968 ≥ − 1 k 0<br />
(42)<br />
and thus we have determined the sector of absolute <strong>stability</strong><br />
The result of our analysis reads as follow<br />
k < 1.5392 . (43)<br />
τ<br />
Consider the <strong>time</strong>-<strong>delay</strong> <strong>nonlinear</strong> system (21) with φ(·) a<br />
continuous monotone increasing <strong>nonlinear</strong>ity. The system is<br />
asymptotic stable <strong>for</strong> all <strong>nonlinear</strong> (and linear) functions verifying<br />
(20) and which are within the sector (0, 1.5392<br />
τ<br />
).<br />
Remark 5. Obviously, the absolute <strong>stability</strong> sector (43) is narrowed<br />
by increasing the <strong>time</strong> <strong>delay</strong>. Regarding the mathematical<br />
model (16) <strong>for</strong> the congestion problem in communication<br />
networks this <strong>time</strong>-<strong>delay</strong> dependent absolute <strong>stability</strong> condition<br />
means that the class of the <strong>nonlinear</strong> functions ψ(·) of the type<br />
(7) is diminished by increasing the round-trip <strong>time</strong> τ.<br />
3. CONCLUSIONS<br />
This paper deals with the analysis of the absolute <strong>stability</strong> <strong>for</strong> a<br />
class of <strong>scalar</strong> <strong>nonlinear</strong> <strong>time</strong>-<strong>delay</strong> systems having monotone<br />
increasing <strong>nonlinear</strong>ities. These systems can be encountered,<br />
<strong>for</strong> instance, as congestion problems in high-per<strong>for</strong>mance communication<br />
networks.<br />
We have used an approach based on frequency domain inequalities<br />
of Popov type <strong>for</strong> <strong>time</strong>-<strong>delay</strong> systems in the critical case of<br />
the transfer function with a simple zero pole. In order to solve<br />
the minmax problem which arises from the frequency domain<br />
inequality, the analytical analysis was completed by numerical<br />
computations using MATLAB software package.<br />
We have obtained a <strong>time</strong>-<strong>delay</strong> dependent absolute <strong>stability</strong><br />
condition i.e. the class of the <strong>nonlinear</strong> functions, and there<strong>for</strong>e<br />
of the <strong>nonlinear</strong> systems under consideration, can be limited by<br />
large <strong>time</strong>-<strong>delay</strong>s (<strong>for</strong> instance, the round-trip <strong>time</strong> in the case<br />
of the congestion problems in high-per<strong>for</strong>mance communication<br />
networks).
f<br />
f<br />
0.8<br />
0.6<br />
0.4<br />
f(λ) <strong>for</strong> θ ∈ (0.37,0.5)<br />
θ = 0.36<br />
θ = 0.375<br />
θ = 0.39<br />
θ = 0.42<br />
θ = 0.45<br />
θ = 0.5<br />
θ = 0.6<br />
0.4<br />
0.2<br />
0<br />
θ ∈ (−0.2, 0.32)<br />
0.2<br />
−0.2<br />
0<br />
−0.4<br />
−0.2<br />
−0.6<br />
−0.4<br />
−0.6<br />
−0.8<br />
−1<br />
θ = − 0.2<br />
θ = 0.1<br />
θ = 0.2<br />
θ = 0.32<br />
−0.8<br />
0 2 4 6 8 10 12 14 16 18 20<br />
λ<br />
Fig. 3. Function f <strong>for</strong> θ ∈ ( 1 3 , 1 2 ).<br />
−0.5<br />
−0.55<br />
−0.6<br />
−0.65<br />
−0.7<br />
f(λ) <strong>for</strong> θ ∈ (0.37,0.5)<br />
0.5 1 1.5 2 2.5<br />
λ<br />
θ = 0.36<br />
θ = 0.375<br />
θ = 0.39<br />
θ = 0.42<br />
θ = 0.45<br />
θ = 0.5<br />
θ = 0.6<br />
Fig. 4. Zoom in: function f <strong>for</strong> λ ∈ (0,π) and θ ∈ ( 1 3 , 1 2 ).<br />
minima<br />
−0.63<br />
−0.64<br />
−0.65<br />
−0.66<br />
−0.67<br />
−0.68<br />
−0.69<br />
−0.7<br />
The curve of the absolute minima<br />
−0.71<br />
0.32 0.34 0.36 0.38 0.4 0.42 0.44 0.46 0.48 0.5<br />
θ<br />
Fig. 5. The absolute minima of f (λ) <strong>for</strong> θ ∈ ( 1 3 , 1 2 ).<br />
REFERENCES<br />
Aizerman, M.A. and Gantmakher, F.R. (1963). <strong>Absolute</strong> <strong>stability</strong><br />
of regulator systems. USSR Academy Publ. House,<br />
Moscow. (in Russian).<br />
−1.2<br />
0 2 4 6 8 10 12 14 16<br />
Fig. 6. Function f <strong>for</strong> θ ∈ (−0.2, 1 3 ,).<br />
Table 1. The maximum minima of f (λ) <strong>for</strong> θ ∈<br />
( 1 3 , 4<br />
π 2 )<br />
θ 0 f (λ 0 )<br />
0.33 -0.6702<br />
0.34 -0.6608<br />
0.35 -0.6548<br />
0.36 -0.6513<br />
0.37 -0.6497<br />
0.38 -0.64968<br />
0.39 -0.6510<br />
0.40 -0.6532<br />
0.41 -0.6563<br />
0.42 -0.6602<br />
Kelly, F. (2001). Mathematical modelling of the internet. In<br />
B. Engquist and W. Schmid (eds.), Mathematics Unlimited -<br />
2001 and Beyond, 685–702. Springer-Verlag, Berlin.<br />
Lefschetz, S. (1965). Stability of <strong>nonlinear</strong> control systems.<br />
Academic Press, New York.<br />
Letov, A.M. (1955). Stability of <strong>nonlinear</strong> control systems:<br />
state of the art. In Proc. 2nd All-Union Conference on Control<br />
Theory. URSS Academic Publishing House, Moscow.<br />
(in Russian).<br />
Letov, A.M. and Lurie, A.I. (1957). Recent research and open<br />
problems in <strong>nonlinear</strong> system <strong>stability</strong>. In Proc. of the URSS<br />
Academy Conference on Scientific Problems of Industrial<br />
Automation. URSS Academic Publishing House, Moscow.<br />
(in Russian).<br />
Popov, V.M. (1959). Stability criteria <strong>for</strong> <strong>nonlinear</strong> control<br />
systems based on laplace trans<strong>for</strong>m. St. Cerc Energetic,<br />
IX(1), 119–136.<br />
Popov, V.M. (1961). On the absolute <strong>stability</strong> of <strong>nonlinear</strong><br />
control systems. Avtom. i telemekhanika, 22(8), 961–979.<br />
Popov, V.M. (1973). Hyper<strong>stability</strong> of Control Systems.<br />
Springer Verlag, Berlin-Heidelberg-New York, 1st edition.<br />
Răsvan, V. (1975). <strong>Absolute</strong> <strong>stability</strong> of <strong>time</strong> lag control systems.<br />
Editura Academiei, Bucharest, 1st edition. (in Romanian;<br />
Russian revised edition by Nauka, Moscow, 1983).<br />
Răsvan, V. (2002). Popov theories and qualitative behavior of<br />
dynamic and control systems. European Journal of Control,<br />
8(3), 190–199.<br />
Răsvan, V., Danciu, D., and Popescu, D. (2010). Frequency<br />
domain <strong>stability</strong> inequalities <strong>for</strong> <strong>nonlinear</strong> <strong>time</strong> <strong>delay</strong> systems.<br />
In Proc. 15th IEEE Mediterranean Electrotechnical<br />
Conference, MELECON. Malta.