Mavilor Motors Company
Mavilor Motors Company
Mavilor Motors Company

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
March 2006<br />
CONTENTS<br />
1 Introduction<br />
2 RoHS By Alfred Domenech<br />
3 <strong>Mavilor</strong> Marketing material<br />
<strong>Mavilor</strong> <strong>Motors</strong><br />
<strong>Company</strong><br />
4 <strong>Mavilor</strong>, Planning department.<br />
5 Tachogenerator & Encoder by<br />
prof. JC Compter<br />
6 How to contact us by e-mail<br />
7 <strong>Mavilor</strong> World Distributors.<br />
INTRODUCTION<br />
This time Mr. Alfred Domenech will<br />
comment on the RoHS Directive. As you<br />
know the quality system is a basis element<br />
of our products.<br />
We want to show you as <strong>Mavilor</strong> structure<br />
works, one of the most important mainstay<br />
of <strong>Mavilor</strong> is the Planning Department, it<br />
is driven by Mr. Antoni Gregori, he will<br />
explain us how this department works.<br />
Our Technical article is written by Professor<br />
JC Compter, on this ocassion he talks about<br />
the thachogenerator and the encoder.<br />
Communication is one of our goals, so you<br />
can find the e-mail adress of all <strong>Mavilor</strong><br />
departments. You can contact us directly.<br />
Thank you very much, <strong>Mavilor</strong> Team.<br />
Know-How<br />
Key products in response to market needs. Working from<br />
their insight into market requirements and customer needs,<br />
our technical sales and engineering companies determine<br />
market requirements and trends. On that basis, we develop<br />
and build modular core products in servo-motors.<br />
Our broad experience and comprehensive technological<br />
expertise in this area is the basis for our highly innovative<br />
product development.<br />
MAVILOR MOTORS, S.A.<br />
Polígono Industrial URVASA,<br />
E- 08130 Santa Perpètua de Mogoda (Barcelona) Spain<br />
Tel. +34 93 574 36 90 - Fax: +34 93 574 35 70<br />
website: www.mavilor.es - e-mail: mavilor@mavilor.es
RoHS Certificate of Compilance<br />
Restriction of the use of certain Hazardous Substances (RoHS)<br />
by Alfred Domenech, Quality Manager <strong>Mavilor</strong> <strong>Motors</strong>.<br />
<strong>Mavilor</strong> <strong>Motors</strong> SA is RoHS compliant since 1st<br />
of January 2006, according to the directive<br />
2002/95/EC of European Union regarding the<br />
restriction of the use of certain hazardous<br />
substances in electrical and electronic equipment<br />
and components. The application of the defined<br />
substances has been eliminated from our products<br />
and process as of 1 st of January 2006.<br />
All supplied products and components are RoHS<br />
conform. We have been working with respect to<br />
the environment protection since two years ago<br />
and we are ready to be ISO 14001, we expect to<br />
be certified during this year.<br />
RoHS stands for Restriction of Certain Hazardous<br />
Substances. It is an European legislation that bans<br />
six hazardous substances from manufacturing<br />
processes: cadmium (Cd), mercury (Hg), hexavalent<br />
chromium (Cr (VI)), polybrominated biphenyls (PBBs),<br />
polybrominated diphenyl ethers (PBDEs) and lead<br />
(Pb).<br />
This legislation will be effective from July 1st, 2006<br />
and from this date on products using these substances<br />
cannot be sold in Europe anymore. Together with<br />
RoHS, another directive dealing with electrical and<br />
electronic equipment recycling, called WEEE (Waste<br />
from Electrical and Electronic Equipment), will take<br />
place.<br />
RoHS and WEEE will affect each and every electronics<br />
or electrotecnics manufacturer directly or indirectly,<br />
regardless geographical location the product<br />
produced.<br />
<strong>Mavilor</strong> <strong>Motors</strong> has checked all products used in<br />
manufacturing, and has achieved together with our<br />
suppliers, that every component goes with such a<br />
Directive.<br />
2<br />
2
<strong>Mavilor</strong> Express - Núm. 32 - March 2006<br />
Catalogues, Brochures and Marketing material<br />
We would like to remind you that<br />
<strong>Mavilor</strong> has at your disposition<br />
different catalogues on different<br />
supports; paper, Cd ,pdf. They will<br />
provide you the best information<br />
required about our products.<br />
At the same time, if you need any<br />
additional publication for Trade Fair,<br />
magazines, etc., please do not<br />
hesitate to contact us, we have all<br />
material that you need.<br />
Thanks and best regards,<br />
Silvia Romero.<br />
<strong>Motors</strong> and drivers<br />
<strong>Motors</strong><br />
Innovative Impulse<br />
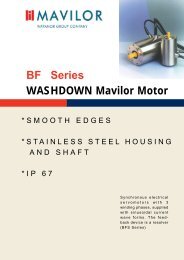
Washdown<br />
BL 190<br />
BLS/BLT 48VDC.<br />
ML no Cogging<br />
MLL no Cogging<br />
Actuator<br />
3<br />
3
PLANNING DEPARTMENT MAVILOR MOTORS<br />
by Mr. Antoni Gregori<br />
One of the most important, the Planning Department is run by Antoni Gregori,<br />
where your orders are processed and planned looking for the shortest delivery<br />
time.<br />
The Production Planning<br />
Department operates under the<br />
Factory Management and is directly<br />
related to Manufacture and<br />
Shipping. It is also related to<br />
Engineering, Technical Office and<br />
Purchasing.<br />
The Planning Department receives<br />
customer orders, identifies the<br />
products requested, and includes<br />
them in production plans.<br />
Contact with the customer begins<br />
with the offer request (if necessary).<br />
If the customer already knows the<br />
product code, it is verified that the<br />
product is appropriate to be<br />
included in production. Otherwise,<br />
either because it is a new product<br />
or it is an article in which a<br />
component must be changed, or if<br />
there is no product code, it is sent<br />
to the Technical Dept so that<br />
appropriate verifications or<br />
changes can be made.<br />
Once the product and price have<br />
been identified, the delivery date<br />
is planned based on the data<br />
requested by the customer, the<br />
production load, and availability of<br />
the materials that make up the<br />
product. All items are completely<br />
analysed through a process similar<br />
to the MRP. If any material is<br />
missing, the Purchase Order and<br />
Manufacturing Order are generated<br />
in the appropriate departments.<br />
With the information on materials<br />
and, hours available and the delivery<br />
periods for the materials requested,<br />
the decision can be made on the<br />
manufacturing and delivery date<br />
closest to that requested by the<br />
customer.<br />
Although manufacturing of motors<br />
and components is customeroriented<br />
(i.e., it is done based on<br />
each specific order), after the article<br />
has been sent to the Manufacturing<br />
Dept, different groups are<br />
established and production is<br />
optimised in batches of the<br />
appropriate size.<br />
Needed components for motor<br />
assembly are prepared 10 days<br />
before the planned date of shipment<br />
so that significant time is available<br />
in order to ensure that nothing is<br />
missing for motor manufacturing.<br />
While manufacture is being<br />
performed, important work is<br />
conducted by the Shipping<br />
Department in preparation for<br />
shipment, including forms of<br />
payment, management of letters of<br />
credit, shipping addresses or forms<br />
of transport.<br />
All orders with suitable<br />
documentation are duly filed in<br />
computerised format and hard copy.<br />
Finally, the Planning Department<br />
prepares the self-control statistics<br />
that list delays in delivery based on<br />
data requested by the customers,<br />
as well as confirmation of orders<br />
after being received from the<br />
customer.<br />
According to the objective<br />
established, the order should be<br />
confirmed within 2 days of reception.<br />
This can be done if it is a standard<br />
or known article. Otherwise, <strong>Mavilor</strong><br />
<strong>Motors</strong> needs a reasonable period<br />
of time in order to be able to confirm<br />
with certainty that the product is the<br />
same as that requested by the<br />
customer.<br />
The other objective is that the<br />
confirmation date and the date on<br />
which the merchandise is actually<br />
sent should not be more than 3 days<br />
apart. We are working on this in all<br />
departments of <strong>Mavilor</strong>.<br />
4
<strong>Mavilor</strong> Express - Núm. 32 - March 2006<br />
TACHOGENERATOR &<br />
ENCODERS<br />
by J.C Compter member of Eindhoven<br />
University<br />
Introduction to Electromechanics<br />
The word tacho is used for many sensors that<br />
give an indication of speed. We shall describe<br />
some common principles.<br />
First of all the "clasic tacho". It<br />
is in fact a moving-coil motor<br />
with brush, with high<br />
requirements being made of the<br />
homogeneity of the magnetic<br />
field, the winding and the<br />
brushless, with a view to the<br />
voltage (the EMF) at the<br />
connections being directly<br />
proportional to the speed over<br />
a wide range, the appeal of this<br />
tacho is that the signal can be<br />
sent straight to the controller<br />
without further processing.<br />
Three aspects are worth<br />
mentioning, and they are the<br />
brushles, the tacho ripple and<br />
the load.<br />
In a motor one of the functions<br />
of the brush is to help reduce<br />
the commutation current. To this<br />
end a deliberate choice is made<br />
regarding the resistivity of the<br />
brush. But in a tacho this does<br />
not come into play, since there<br />
is no current worth mentioning<br />
flowing in the windings. As a<br />
yardstick in a tacho the choice<br />
of brush/collector transition,<br />
this leads to a brush with a high<br />
metal content. Metal springs are<br />
also used as brushes.<br />
The EMF of a tacho, like the EMF<br />
of a motor, has a ripple, wich is<br />
associated to the number of<br />
laminations. For the peak-peak<br />
value of an ideal tacho with n<br />
laminations we have:<br />
Utt= K.ωmech.(1-sin(2. /n))<br />
The lowest interfering frequency<br />
occurring, peculiar to the<br />
number of laminations, is equal<br />
to:<br />
f min = ωmech/n<br />
Apart from the irregularities<br />
associated to the collector, we<br />
must also be prepared for<br />
disturbances whose frequency<br />
is proportional to the speed of<br />
rotation. Inequalities in coils and<br />
the magnet are the cause of<br />
this.<br />
For the speed imbalance in a<br />
speed controlled system to<br />
meet a particular specification<br />
(such as >3%), it is not the case<br />
beforehand that the minimum<br />
number of laminations is fixed<br />
by the above formula. If the<br />
frecuency f is greater than the<br />
bandwidth of the control loop,<br />
it is too slow to correct the<br />
apparent speed fluctuations.<br />
So the conclusion is that the<br />
minimum mechanical angular<br />
velocity and the bandwidth of<br />
the control set the relation<br />
between the maximum<br />
permisible speed imbalance as<br />
a consequence of the tacho<br />
fluctuations and the number of<br />
laminations to be used.<br />
In addition, we shall have to see<br />
whether or not the (apparent)<br />
speed variations give rise to a<br />
large ripple in the motor<br />
current. If this were to be<br />
accepted, then the motor will<br />
experience more dissipation<br />
than necessary and disturbing<br />
noise generation and higher<br />
mechanical wear in the driver<br />
may be expected.<br />
Regarding the (electrical) load<br />
of a tacho, the tacho must be<br />
seen as a voltage source with<br />
an internal resistance (the<br />
Tacho resistance R tacho). When<br />
loading a tacho with a circuit<br />
with resistance Ri, The tacho<br />
voltage detected is:<br />
U=Ri.(EMF/Ri+Rtacho)=EMF.(Ri/Ri+Rtacho)<br />
<strong>Mavilor</strong> provides tachogenerator,<br />
included in our product range.
6<br />
incremental encoder<br />
LEDs<br />
Encoders<br />
Figure 1.<br />
sensor SO S90<br />
Time<br />
4 sensors<br />
absolute encoder<br />
There are many measuring systems<br />
available, which are characterised<br />
by an output frequency that is<br />
directly proportional to the speed<br />
to be detected. The simplest is a<br />
small wheel with cogs mounted on<br />
the turning shaft. Holding a magnet<br />
and a coil in the proximity generates<br />
an alternating voltage in the coil,<br />
whose frequency is directly<br />
proportional to the mechanical<br />
speed. Many other forms of<br />
construction are feasible and<br />
commercially available.<br />
If we want to convert this frequency<br />
into an analogue voltage for the<br />
controller, a frequency-to-voltage<br />
converter is required. Analog<br />
Devices are one of the companies<br />
supplying ICs for this purpose. But<br />
many circuits of this kind are<br />
characterised by an electrical time<br />
constant that is the lowest pulse<br />
return time that we want to use.<br />
This establishes a clear relationship<br />
between the choice of the minimum<br />
number of pulses the sensor must<br />
emit per rotation, the desired<br />
bandwidth and the lowest operating<br />
speed. For guidance: minimum<br />
pulse frequency 10* the desired<br />
bandwidth.<br />
For Drives with high specifications<br />
as regards speed or position,<br />
encoders are used. There are two<br />
types of encoder, the absolute and<br />
the incremental encoder. Absolute<br />
encoders contain electronics that<br />
transmit the actual position at every<br />
point in time. Incremental encoders<br />
transmit the change in position; if<br />
present, an index pulse is also<br />
emitted once every rotation. If the<br />
incremental encoder is used in a<br />
position loop, the actual position<br />
can be determined following receipt<br />
of the index pulse. Absolute<br />
encoders have a larger moment of<br />
inertia than incremental encoders.<br />
They are also bigger and more<br />
expensive.<br />
Fi . 1 Shows an incremental<br />
encoder disc with index. The disc<br />
itself is made of a transparent<br />
material. Two light sources and light<br />
sensors, wich are offset from one<br />
another by a quarter space of the<br />
grid, emit two signals in<br />
combination with the grid, which<br />
are 90º offset from one another.<br />
Electronic processing produces two<br />
square wave signals, the S0 and<br />
the S90 signal respectively. The<br />
direction of rotation can easily be<br />
detected by looking at the signal<br />
value of the other signal at the time<br />
of an edge.<br />
If the disc has 1000 lines,<br />
combining the S0 and S90 signals,<br />
gives us 4000 pulses/rotation.<br />
there are incremental encoders<br />
available commercially with a few<br />
hundred to thousands of lines.<br />
The unprocessed encoder signal<br />
can also be fed to an interpolar;<br />
this is an electronic circuit that<br />
retrieves the information from the<br />
amplitude of these two sensor<br />
signals in order to determine the<br />
position in more detail. using<br />
these electronics 1,000,000<br />
pulses/rotation are attainable.<br />
As we have previously said,<br />
absolute encoders transmit the<br />
absolute position at any given<br />
time. To determine this absolute<br />
position the disc is equipped with<br />
a large number of tracks, which<br />
are read out and transmitted to<br />
the output simultaneously.<br />
The strength of the absolute<br />
encoder is that the rotor position<br />
is known immediately after<br />
starting a drive, enabling a<br />
position control to compare the<br />
desired and the actual position<br />
straightaway. In addition, an<br />
interference pulse at one of the<br />
outputs will only lead to an<br />
incorrect position indication for<br />
the duration of the interference<br />
pulse.<br />
Where the incremental encoder<br />
is concerned, in a positional loop<br />
we will always have to search<br />
carefully for a reference (such as<br />
a stop) after starting up. At the<br />
same time an interference pulse<br />
produces a permanent error until<br />
the indexpulse has passed.<br />
Encoders are available in both<br />
rotary and linear form.<br />
Remember that when using linear<br />
optical encoders (with a length<br />
of 1 meter for example) the<br />
temperature can be an interfering<br />
factor where the accuracy of the<br />
position measured is concerned.<br />
6
<strong>Mavilor</strong> Express - Núm. 32 - March 2006<br />
How to contact us by e-mail<br />
Francesc Cruellas General Manager fcruellas@mavilor.es<br />
Jordi Mayolas Financial Manager jmayolas@mavilor.es<br />
Joan Galceran Factory Manager jgalceran@mavilor.es<br />
Enric Solsona Sales Manager esolsona@mavilor.es<br />
Miquel Angel Rodriguez Sales Manager marodriguez@mavilor.es<br />
Alfred Domenech Quality Manager adomenech@mavilor.es<br />
Ivan Flotats I+D Engineering iflotats@mavilor.es<br />
Albert Bel Technical Office bel@mavilor.es<br />
Antoni Gregori Planning Department agregori@mavilor.es<br />
Antonio Garcia Purchasing Manager agarcia@mavilor.es<br />
Karin verdaguer Purchasing Department kverdaguer@mavilor.es<br />
Silvia Romero Communication Department sromero@mavilor.es<br />
7
Our Distributor<br />
Argentina +54 1142225040<br />
Australia +61 733974575<br />
Austri +43 225271110<br />
Brazi +55 1150941122<br />
Chile +56 2450 4200<br />
China/Beijing +86 10 8202 5588<br />
China/Shanghai +86 21 5435 4316<br />
China/Guangzhou +86 20 8759 1568<br />
China/Hangzhou +86 57181951299<br />
Czech Republic +420 261123187<br />
Denmark +45 43718088<br />
France +33169633515<br />
Germany +49 6181180120<br />
Greece +30 3105566239<br />
Holland +31 186 610 155<br />
Hungary +36 1265 0677<br />
India +91 222 2872211<br />
Iran +98 2139 30203<br />
Israel +972 36470471<br />
Italy +39 266200980<br />
Japan +81 3 5298 2700<br />
Korea +82 27852262<br />
Malaysia +60 52538555<br />
Mexico +52 5553632331<br />
Morroco +212 22 447871<br />
Norway +47 22335301<br />
Poland +48 713390029<br />
Russia +7 495 9135161<br />
South Africa +27 114681881<br />
Spain +34 934601631<br />
Sweden +46 21 4703300<br />
Switzerland +41 22 960 70 70<br />
Taiwan +886 229145767<br />
Turkey +90 216 641 6884<br />
United Kingdom +44 1522699500<br />
United States +1 2037298258