

Localization from Pairwise Distance Relationships using Kernel PCA
Localization from Pairwise Distance Relationships using Kernel PCA
Localization from Pairwise Distance Relationships using Kernel PCA

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
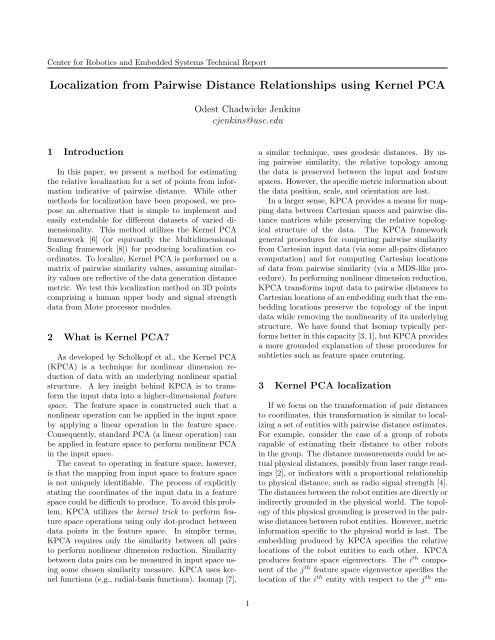
edding dimension. We assume the number of dimensionsto select for embedding is the same as the dimensionalityof the input data (i.e. planar world, 3Dcoordinates) and is known a priori. If landmarks withabsolute coordinates in the physical world are includedin the K<strong>PCA</strong> process, an affine transformation can befound to restore world metric information to the embeddedcoordinates.For this paper, we assume that all entities can estimatedistance to all other entities. This assumption isnot true in general and is a potential source of localizationerror because the localization problem becomesunderconstrained.Our implementation of K<strong>PCA</strong> is derived <strong>from</strong> the<strong>Kernel</strong> <strong>PCA</strong> toy example for MATLAB provided bythe authors of [6], which can be downloaded <strong>from</strong>http://www.kernel-machines.org/.4 ResultsWe tested the <strong>Kernel</strong> <strong>PCA</strong> localization techniqueon two data sources with available ground truth. Thefirst dataset is a set of voxels collected <strong>from</strong> a volumecapture system (Figure 1 1). The second dataset ispairwise signal strength data <strong>from</strong> multiple communicatingradio modules (Figure 2 2).4.1 Human VolumesThe human volume dataset was collected <strong>from</strong> a volumecapture system implemented <strong>from</strong> the descriptionprovided by Penny et al.[5]. This dataset consists of aset of points in 3D representative of the occupancy of ahuman upper body within a voxel grid. The volume ofeach voxel is approximately 2.5in 3 . The volume pointswere converted into a matrix of pairwise Euclidean distancesto serve as input into the localization and savedfor ground truth. The pairwise distance matrix wasrun through K<strong>PCA</strong> localization to reproduce volumepoint locations closely approximating the input volume,but not exact. The variance between the inputand localized volumes can be seen by their respectivepairwise distance matrices. These matrices illustratethat the embedding process does not completely preservethe pairwise distances, but provides a good approximation.This inexact approximation stems <strong>from</strong>the fact that K<strong>PCA</strong> itself is a least-squares approximationin feature space. We hypothesize that thelocalization can be automatically refined to minimizedifference between the pairwise distances of the inputand localized volumes, but that is for future work.4.2 Radio ModulesThe radio signal strength and collected <strong>from</strong> a setof 7 Mote processor modules in a 2D hexagon patterncontinuously passing messages between each other.This data and ground truth was graciously provided byGabe Sibley. Signal strength between each pair of radioswas used as an indicator of distance between thepair and formed into a matrix of pairwise distances.However, K<strong>PCA</strong> cannot be performed directly on thismatrix because of its gross nonsymmetries. Severalaspects of the K<strong>PCA</strong> technique assume the matrix issymmetric (or at least close to symmetric). One criticalaspect require symmetry is the feature space centeringmechanism. We applied two modifications toK<strong>PCA</strong> localization for the problems associated withnonsymmetric pairwise distances. The first modificationscale normalized each column followed by scalenormalization of each row. This normalization wasused to counter variances between radios with differenttransmitting strengths and reception capabilities.Making an analogy between radios radial basis kernels,this normalization would be an attempt to makekernels of different widths scale to a common width.The second modification assumes normalization willnot bring symmetry to the distance matrix. Thus, featurespace centering will not work. This modificationremoves feature space centering <strong>from</strong> the localizationprocess. The feature space mean will be represented inthe first eigenvector of the embedding. We ignore thefirst eigenvector and use the second and third to performnormalization. The radio placement produced byK<strong>PCA</strong> localization was surprisingly representative oftheir actual hexagon positioning, but far <strong>from</strong> perfect.Considering the factors obfuscating the structure ofthe radio positions and much room is left for improvingK<strong>PCA</strong> localization, this result is quite promising.5 AcknowledgementsThe authors would like to thank Gabe Sibleyfor providing radio signal strength data, MajaMatarić, Gaurav Sukhatme, Andrew Howard, andEvan Drumwright for insightful discussions.References[1] Chi-Wei Chu, Odest Chadwicke Jenkins, and Maja JMatarić. Markerless kinematic model and motion capture<strong>from</strong> volume sequences. In To appear in the IEEEComputer Society Conference on Computer Vision andPattern Recognition (CVPR 2003), Madison, Wisconsin,USA, June 2003.2
[2] A. Howard, M. J Matarić, and G. S. Sukhatme. Anincremental deployment algorithm for mobile robotteams. In Proceedings of the IEEE/RSJ InternationalConference on Intelligent Robots and Systems, pages2849–2854, Lausanne, Switzerland, October 2002.[3] Odest Chadwicke Jenkins and Maja J Matarić. Automatedderivation of behavior vocabularies for autonomoushumanoid motion. In To appear in the SecondInternational Joint Conference on AutonomousAgents and Multiagent Systems (Agents 2003), Melbourne,Australia, July 2003.[4] Andrew M. Ladd, Kostas E. Bekris, GuillaumeMarceau, Algis Rudys, Dan S. Wallach, and Lydia E.Kavraki. An incremental deployment algorithm for mobilerobot teams. In Proceedings of the IEEE/RSJ InternationalConference on Intelligent Robots and Systems,Lausanne, Switzerland, October 2002.[5] Simon G Penny, Jeffrey Smith, and Andre Bernhardt.Traces: Wireless full body tracking in the cave. InNinth International Conference on Artificial Realityand Telexistence (ICAT’99), December 1999.[6] Bernhard Scholkopf, Alex J. Smola, and Klaus-RobertMuller. Nonlinear component analysis as a kernel eigenvalueproblem. Neural Computation, 10(5):1299–1319,1998.[7] J. B. Tenenbaum, V. de Silva, and J. C. Langford. Aglobal geometric framework for nonlinear dimensionalityreduction. Science, 290(5500):2319–2323, 2000.[8] Christopher K. I. Williams. On a connection betweenkernel pca and metric multidimensional scaling. MachineLearning, 46(1-3):11–19, 2002.3
32.82.62.40.062.20.0420.021.801.6−0.021.4−0.041.2−0.0610−0.2−0.4−0.6−0.5 0 0.5 10.050−0.050.080.060.040.020−0.02−0.04−0.06(a)(b)original distancesembedding distances100200100200Student Version of MATLAB300300400Student Version of 400MATLAB500500600600700700800800900900100 200 300 400 500 600 700 800 900100 200 300 400 500 600 700 800 900(c)(d)Figure 1:Student Version of MATLABStudent Version of MATLAB4
(a)(b)(c)Figure 2:5


