Ambience Project ³Find a Meeting´ Video - Sidi Mohammed Senouci
Ambience Project ³Find a Meeting´ Video - Sidi Mohammed Senouci
Ambience Project ³Find a Meeting´ Video - Sidi Mohammed Senouci

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
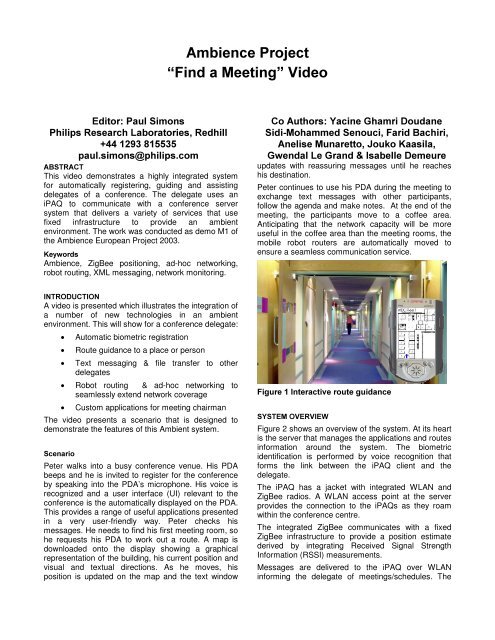
position of each iPAQ every 2-3 seconds. The positionis then filtered with previous position estimates toproduce a more reliable smoothed position for the usein the demonstration.L3$4&OLHQW'HYLFHClient devices are equipped with Familiar Linuxoperating system and Blackdown Java RuntimeEnvironment. Actual client application software is Java1.3.1 Standard Edition compatible. All messagingbetween clients and server is based on XML, whichcan be easily extended to future needs. Choosingopen standards, such as Java and XML , gives thebenefit of flexibility and the support for wide variety ofdifferent client devices and environments.L3$4*UDSKLFDO8VHU,QWHUIDFH*8,The iPAQ runs a Java based application GUI toenable the user to select and control the availableapplications. It provides a simple user interface thatallows the user to switch between a number of viewsthat control each application for:xxxxxxMap – display map of local areaSend – send messages to delegates presentFind – locate places or peopleMsg – read received messagesDoc – documents viewerInfo – display status information of the system([PDSOHVRIWZRVXFK*8,VFUHHQVDUHVKRZQLQ)LJXUH )LJXUH)LJXUH0DS$SSOLFDWLRQ)LJXUH)LQG$SSOLFDWRQIn general the interfaces provide:x Graphical map of building and visual andtextual instructions on how to proceedx Ability to select recipients from the list ofattendeesx Send messages with subject and messagefieldsx View received documents,QWHJUDWHG6HUYHU6\VWHPThe applications are made accessible to the usersfollowing a client-server architecture. The Tomcatservlet container from the Apache SoftwareFoundation [Tom] is used, implementing theapplications as servlets 1 .Following a scheme that resembles the popular webservices scheme [ws], the communications betweenthe GUI (client) and the server rely on the http protocoland the data exchanged between the clients and theserver are encoded using XML.The communications are secured using the SSLprotocol. The use of X-509 certificates provide formutual authentication of clients and server. Thesesecurity mechanisms are supported by the ApacheTomcat server.Finally, the data manipulated by the server and theapplications are managed by an SQL relationaldatabase that supports concurrent accesses,synchronisation and permanent storage. “MySQL” , an1 A servlet is a small program that runs on a server.
O PMQ K@L4MNRCS¢TU§VSW' (*34122+34' 5 1276829'&'+,-+.4' / ) +.:(¢12.4+";¢#C-authentication-services access-XML request processing-XML response sendingIJ £¦ ¦"!$#§%-participants list (+their rights)-conference list-document listI§J=8,-+) 5 +.=7,-+) 5 +.)LJXUH6HUYHU$UFKLWHFWXUH0RELOH5RERWVC#% ¦A¦ABC© ¨?B¢¦¨ C¥"E"#%-XML parsing-dispatch requestamong services-return serviceresponse¦AF ¢ 8© #%G"? ¥ # ©UPDATESEND a MSGFIND A PERSON«unique instanceseveral instancesThe robots [SPIF] have been designed and built atENST’s Computer Science department with standard,low cost hardware components. Their architecture isopen and modular to meet the needs of sensor andactuator customisation. The board offers standardcommunications: Ethernet, 802.11 and Bluetooth. Italso provides a wide range of input output interfaces:USB, I2C, PCMCIA, 115 Kbits IRDA, ISO 7816-2Smartcard, 8 bit audio CODEC, graphical LCDtouchscreen.The battery is controlled by a dedicated circuit thatkeeps the processor aware of its load level. When thebattery’s level reaches a low limit, the robot willcomplete its critical tasks, if any, and move towards arefuelling intelligent docking station. The station emitsa laser beam to guide the robot back.)LJXUH0RELOH5RERW$GKRF1HWZRUNLQJIn the scenario described when the participants moveto coffee area for a coffee break, an ad hoc network isestablished to guarantee an ambient communicationservice between them. Ad-hoc networks are multi-hopwireless networks where all nodes cooperativelymaintain network connectivity. Such networks providemobile users with ubiquitous communication capabilityand information access regardless of location.The main challenge in forming ad-hoc networks is therouting. Routing protocols in such networks must beadaptive to face frequent topology changes becauseof node mobility. Minimizing the number of hops is themost common criteria adopted by the routingprotocols proposed within the IETF MANET workinggroup. However, the number of hops criteria is notnecessarily the most suitable metric to build routingdecisions. Route selection must take into account thecurrent link conditions, to offer a certain quality ofservice (QoS). The basic function of QoS routing is tofind a network path that satisfies some givenconstraints.For the purpose of this demo, we develop a Quality-of-Service (QoS) routing protocol for mobile ad-hocNetworks. This QoS routing protocol aims to enhancethe perceived communication quality within the coffeearea [MBA02]. We perform the proposed QoSenhancedrouting based on the Optimized Link StateRouting (OLSR) protocol [OLSR], introducing a moreappropriate metric than the number of hops. Theproposed QoS routing protocol, called QOLSR,produces better performance comparing with thelegacy OLSR protocol, as depicted in Figure 8.
installed on all wireless nodes (including robots in therobot-based routing). This tool allows the visualisationof the entire network state including the state of eachnode, links as well as the entire topology. It will alsovisualise the routing tables of each node (Figure 10).This tool was developed independently of theunderlying ad-hoc routing protocol and can be usedfor either proactive or reactive ad-hoc routingprotocols.)LJXUH3HUIRUPDQFHHYDOXDWLRQRI42/655RERW5RXWLQJThe robot implements an ad hoc routing algorithm inorder to support multi-hop routing (in an IPv6environment). In other words, the robot can either beused to connect several wireless devices that are notwithin the range of one another or as an extension ofan existing infrastructure – in which case a gatewaybetween the fixed infrastructure and the ad hocnetwork is used, as depicted Figure 6. Contrary tomany classical ad hoc networks, routing is designedhierarchically such that communication relays areexclusively robots (and not low capacity nodes --battery, CPU, etc.). The use of a wireless networkcore made up of mobile robots adds some control inthe ad hoc network. This feature is essential in orderto provide an acceptable link quality, increase networkperformance, and thus support real time services inthe network, as shown in [LeG03].Monitoring agents gives the following set ofinformation to the monitoring station (as shown inFigure 10):xxxxTimestamp (date:jjmmyyyy/hour:hhmmss)Node’s addressing information (IP address,subnet mask, gateway address, MACaddress, SSID)Routing table with neighbour’s IP addressesMonitored wireless link characteristics (radiochannel ID, noise, signal strength, packeterror ratio)gatewayAPPDADedicated mobile routersAd hoc network)LJXUH$GKRF1HWZRUNLQJZLWKWKH0RELOH5RERWV0RQLWRULQJWKH$GKRF1HWZRUNA monitoring station was developed to show theimprovements obtained when using the QOLSR or therobot-based routing compared to the OLSR protocol.The monitoring station is based on monitoring agentsPDA)LJXUH0RQLWRULQJVWDWLRQVQDSVKRW6XPPDU\RI7HFKQRORJ\The key technologies demonstrated are:x Natural speech recognition – Thales, Francex Java based iPAQ GUI – CCC, Finlandx XML message system – CCC, Finlandx ZigBee positioning - Philips, UK
xxxIntegrated server – ENST, FranceRobot routing/ad-hoc networking – ENST,FranceNetwork monitoring and analysis – LIP6,Franceand for their detailed contributions to this abstractmade by Yacine Ghamri Doudane <strong>Sidi</strong>-<strong>Mohammed</strong><strong>Senouci</strong>, Farid Bachiri, Anelise Munaretto, JoukoKaasila, Gwendal Le Grand & Isabelle Demeure.&21&/86,216The video demonstrates an ambient environmentdesigned to improve the experience of attending aconference. From the moment the delegate enters theconference venue, registration is simple andautomatic which gives rise to a wealth of usefulservices available through the user’s PDA. Thesystem is designed to help make finding people andplaces easy and allow information to be exchanged.The real work of this ambient system goes on in thebackground as the server authenticates people, trackstheir movements, routes messages, exchangesdocuments and handles user requests. The serveralso successfully implements a scheme of ad-hocnetworking and robot routing that fills holes in thenetwork.$&.12:/('*0(176This work would not have been possible without thesupport of the European commission. The team wouldalso like to thanks the overall project coordinator Evertvan Leonen for his help and guidance. Finally thanksto all the efforts of the demo M1 team represented bythe companies CCC, ENST, LIP6, Philips & Thales5()(5(1&(6[LeG03] G. Le Grand, R. Meraihi, Cross-layer QoS andterminal differentiation in ad hoc networks for real-timeservice support, proceedings of MedHOC NET 2003,(IFIP-TC6-WG6.8), Mahdia, Tunisia, June 25-27 2003[SPIF] ENST, SPIF robots,http://www.infres.enst.fr/~spif/ambience.html[MySQL] MySQL wen page. http://www.mysql.com/[SSL] SSL 3.0 SPECIFICATION web page.http://wp.netscape.com/eng/ssl3/.[Tom] Apache Jakarta <strong>Project</strong> web page.http://jakarta.apache.org/tomcat/.[ws] W3C Web Services Activity web page.http://www.w3.org/2002/ws/.[XML] Extensible Markup Language (XML) web page.http://www.w3.org/XML/.[MBA02] Munaretto fonseca Anelise, Badis Hakim, AlAgha Khaldoun and Pujolle Guy, “A Link-state QoSRouting Protocol for Ad Hoc Networks”, IEEEConference on Mobile and Wireless CommunicationsNetworks, MWCN’02, Stockholm, Sweden,September 2002.[OLSR] T. Clausen (Ed.) and P. Jacquet (Ed.).“Optimized Link State Routing Protocol”, IETF InternetDraft, draft-ietf-manet-olsr-09.txt.