Biaxial tripod MEMS mirror and omnidirectional lens for a low cost ...
Biaxial tripod MEMS mirror and omnidirectional lens for a low cost ...
Biaxial tripod MEMS mirror and omnidirectional lens for a low cost ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
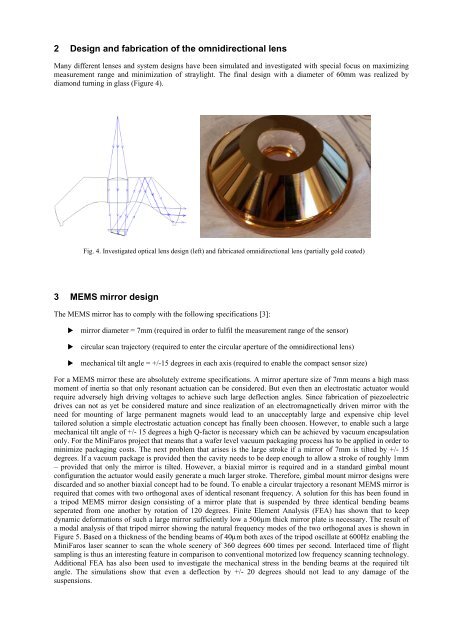
2 Design <strong>and</strong> fabrication of the <strong>omnidirectional</strong> <strong>lens</strong>Many different <strong>lens</strong>es <strong>and</strong> system designs have been simulated <strong>and</strong> investigated with special focus on maximizingmeasurement range <strong>and</strong> minimization of straylight. The final design with a diameter of 60mm was realized bydiamond turning in glass (Figure 4).Fig. 4. Investigated optical <strong>lens</strong> design (left) <strong>and</strong> fabricated <strong>omnidirectional</strong> <strong>lens</strong> (partially gold coated)3 <strong>MEMS</strong> <strong>mirror</strong> designThe <strong>MEMS</strong> <strong>mirror</strong> has to comply with the fol<strong>low</strong>ing specifications [3]:<strong>mirror</strong> diameter = 7mm (required in order to fulfil the measurement range of the sensor)circular scan trajectory (required to enter the circular aperture of the <strong>omnidirectional</strong> <strong>lens</strong>)mechanical tilt angle = +/-15 degrees in each axis (required to enable the compact sensor size)For a <strong>MEMS</strong> <strong>mirror</strong> these are absolutely extreme specifications. A <strong>mirror</strong> aperture size of 7mm means a high massmoment of inertia so that only resonant actuation can be considered. But even then an electrostatic actuator wouldrequire adversely high driving voltages to achieve such large deflection angles. Since fabrication of piezoelectricdrives can not as yet be considered mature <strong>and</strong> since realization of an electromagnetically driven <strong>mirror</strong> with theneed <strong>for</strong> mounting of large permanent magnets would lead to an unacceptably large <strong>and</strong> expensive chip leveltailored solution a simple electrostatic actuation concept has finally been choosen. However, to enable such a largemechanical tilt angle of +/- 15 degrees a high Q-factor is necessary which can be achieved by vacuum encapsulationonly. For the MiniFaros project that means that a wafer level vacuum packaging process has to be applied in order tominimize packaging <strong>cost</strong>s. The next problem that arises is the large stroke if a <strong>mirror</strong> of 7mm is tilted by +/- 15degrees. If a vacuum package is provided then the cavity needs to be deep enough to al<strong>low</strong> a stroke of roughly 1mm– provided that only the <strong>mirror</strong> is tilted. However, a biaxial <strong>mirror</strong> is required <strong>and</strong> in a st<strong>and</strong>ard gimbal mountconfiguration the actuator would easily generate a much larger stroke. There<strong>for</strong>e, gimbal mount <strong>mirror</strong> designs werediscarded <strong>and</strong> so another biaxial concept had to be found. To enable a circular trajectory a resonant <strong>MEMS</strong> <strong>mirror</strong> isrequired that comes with two orthogonal axes of identical resonant frequency. A solution <strong>for</strong> this has been found ina <strong>tripod</strong> <strong>MEMS</strong> <strong>mirror</strong> design consisting of a <strong>mirror</strong> plate that is suspended by three identical bending beamsseperated from one another by rotation of 120 degrees. Finite Element Analysis (FEA) has shown that to keepdynamic de<strong>for</strong>mations of such a large <strong>mirror</strong> sufficiently <strong>low</strong> a 500µm thick <strong>mirror</strong> plate is necessary. The result ofa modal analysis of that <strong>tripod</strong> <strong>mirror</strong> showing the natural frequency modes of the two orthogonal axes is shown inFigure 5. Based on a thickness of the bending beams of 40µm both axes of the <strong>tripod</strong> oscillate at 600Hz enabling theMiniFaros laser scanner to scan the whole scenery of 360 degrees 600 times per second. Interlaced time of flightsampling is thus an interesting feature in comparison to conventional motorized <strong>low</strong> frequency scanning technology.Additional FEA has also been used to investigate the mechanical stress in the bending beams at the required tiltangle. The simulations show that even a deflection by +/- 20 degrees should not lead to any damage of thesuspensions.