lacoste and romberg stabilized platform shipboard gravity meter
lacoste and romberg stabilized platform shipboard gravity meter
lacoste and romberg stabilized platform shipboard gravity meter

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
GEOPHYSICS, VOL. XXII, IUO. 1 (FEBRUARY, 1967), PP. 09-104, 7 1*1(X, 2 TABLESLACOSTE AND ROMBERG STABILIZED PLATFORMSHIPBOARD GRAVITY METERtLUCIEN LACOSTE*, NEAT, CLARKSON*, GEORGE HAMILTON*The LaCoste <strong>and</strong> Romberg <strong>gravity</strong> <strong>meter</strong> designed for operation in gimbals was redesigned Ior satisfactory<strong>stabilized</strong> <strong>platform</strong> operation <strong>and</strong> a suitable <strong>stabilized</strong> <strong>platform</strong> was made. A major modification of the <strong>gravity</strong> <strong>meter</strong>was redesign of the suspension to more nearly restrict motion to a single degree of freedom. Errors due to crosscoupling between horizontal <strong>and</strong> vertical accelerations <strong>and</strong> an unsuspected type of cross coupling clue to <strong>gravity</strong><strong>meter</strong> imperfections are important but correctable.The <strong>stabilized</strong> <strong>platform</strong> <strong>gravity</strong> <strong>meter</strong> has been tested at sea. Compared to the gimbal type of <strong>gravity</strong> <strong>meter</strong>, it issimpler to operate; it will operate in rough weather; <strong>and</strong> it is considerably more accurate.INTRODUCTIONLaCoste <strong>and</strong> Romberg has recently completed<strong>and</strong> tested a <strong>stabilized</strong> <strong>platform</strong> <strong>shipboard</strong> (orairplane) <strong>gravity</strong> <strong>meter</strong>. Earlier L & R <strong>shipboard</strong><strong>gravity</strong> <strong>meter</strong>s were hung from gimbals <strong>and</strong> correctionswere made ior the swinging of the gimbals.There were several reasons for changing to a<strong>stabilized</strong> <strong>platform</strong>. An important reason was theavailability of inertial quality gyros with estimatedlives of l+ years. This is a much longer lifethan the 1000-hour or 7-week lives given in specificationspreviously known to L & R.A second reason for changing to a <strong>stabilized</strong><strong>platform</strong> was that experience showed that it wasfrequently desirable to operate <strong>gravity</strong> <strong>meter</strong>s ataccelerations much greater than the *SO galaccelerations L & R gimbal <strong>gravity</strong> <strong>meter</strong>s weredesigned for. At greater accelerations, the horizontalacceleration correction (or Browne correction)required with gimbal <strong>gravity</strong> <strong>meter</strong>s becomesso large that a digital computer would berequired for adequate accuracy. This would sogreatly increase the cost <strong>and</strong> complexity of the<strong>gravity</strong> <strong>meter</strong> that it appeared to be necessary touse a <strong>stabilized</strong> <strong>platform</strong>.A third reason is that inertial quality gyroshave more than adequate accuracy for <strong>shipboard</strong><strong>gravity</strong> <strong>meter</strong> operation while the overall performanceof the long period pendulums used withL & R gimbal supported <strong>gravity</strong> <strong>meter</strong>s was marginal.The long period pendulums also requiredappreciable field testing <strong>and</strong> adjusting by operators.Before describing the details of the new model<strong>gravity</strong> <strong>meter</strong>, the requirements for <strong>stabilized</strong><strong>platform</strong> operation will be discussed a comparisonbetween these requirements antI those for agimbal <strong>gravity</strong> <strong>meter</strong> will be made; <strong>and</strong> themethod of satisfying the requirements will begiven.THE STABILIZED PLATFORMIn order to determine what accuracy is requiredin the <strong>stabilized</strong> <strong>platform</strong>, it is necessary to findout how the <strong>gravity</strong> <strong>meter</strong> reading is affected byerrors in verticality (LaCoste, lY5Ya1. This can bedone by a consideration of Figure 1, which showsa <strong>gravity</strong> <strong>meter</strong> on a <strong>stabilized</strong> 1)latform. Thesensitive axis of the <strong>gravity</strong> <strong>meter</strong> is shown to beoff vertical by an angle e. The error in measuring<strong>gravity</strong> is thene, = g cos e - ah sin e ~- g. (I)when g= <strong>gravity</strong> <strong>and</strong> ah= the horizontal accelerationin the direction of the error angle e. Equation(1) can be approximated bye, G - ahe - ge”/‘2. (2)The last term in (2) is the static error thatexists even when there is no motion. For a onemgal accuracy, the second term requires a verticalaccuracy of 5 minutes, which is not lrard to attain.f Portions of this paper were presented at the 1965 Regional SEG meeting in Bakersfield, Calif., <strong>and</strong> at the 1966Regional SEG meeting in Long Beach, Calif. Manuscript received by the editor 22 July 1966.* LaCoste & Romberg, Inc., Austin, Texas99
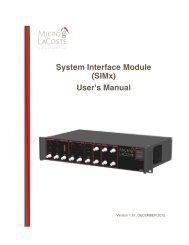
Stabilized Platform Shipboard Gravi<strong>meter</strong>-Design 101IIGIMBALJOINT0 =-ah/g- GRAVITY METER.g =ga cose=g, -&3IACCELERATIONg’=g,-j--(Q - e)2Error=g’-g=g0e-ge2 .r=-ahe-g$FIG. 2. Gravity <strong>meter</strong> suspended by gimbals.Thereforeg = g, cos 8 h g, - g02/2. (3)The last term in (3) is known as the Browne correctionor horizontal acceleration correction.If the periods of the horizontal accelerations arenot long compared to the natural period of thegimbal suspension, then (3) does not in generalhold. However it can be shown to hold for allperiods if the <strong>gravity</strong> <strong>meter</strong> is placed at the correctdistance from the gimbal joint <strong>and</strong> if averagevalues are used (LaCoste, 1959b). This correctdistance is the length of a simple pentlulum whichhas the same period as the gimbal suspended<strong>gravity</strong> <strong>meter</strong>. In order to show that equation (3)holds in this case, the gimbal suspended <strong>gravity</strong><strong>meter</strong> is treated as an undamped pendulum subjectedto a sinusoidal horizontal accclcration or toa Fourier series representing an arbitrary horizontalacceleration. The approximations are alsomade that the average values of sin? 8 <strong>and</strong> cos2 0are f <strong>and</strong> the average values of sin B, cos 13 cos 0,
102 LaCoste, Clarkson, <strong>and</strong> Hamilton<strong>and</strong> cos 0 sin 0 are 0. These are the average valuesior an integral number of cycles <strong>and</strong> thereforethey are very close approximations for any timeinterval of many cycles duration.In order to compute the Hrowne correctiongiven in (3) it is necessary to measure the value of0, <strong>and</strong> this measurement rcquircs a <strong>stabilized</strong>reference If there is an error e in the <strong>stabilized</strong>reference, then the measured value of 0 will beO-e <strong>and</strong> the measured value of <strong>gravity</strong> will beg’ = g, - g (0 - e)“/2. (4)The error in g can then be obtained from (3) <strong>and</strong>(4); it ise, = g’ - g = g& - ge”/2. (5’1Equation (5) can be simplified by making use ofthe differential equation of the gimbal suspended<strong>gravity</strong> <strong>meter</strong>. It iswhere I= the length of a simple pendulum havingthe same period as the gimbal suspended instrument.Equation (6) can be written as(6)-go = &, + Iti. (7)The right side of (7) however is the horizontalacceleration a’h at the <strong>gravity</strong> <strong>meter</strong> which is adistance 1 below the gimbal joint. Therefore (5)becomesey = - aA’e - (@)/2. (8)If equations (8) <strong>and</strong> (2) are compared <strong>and</strong> it isnoted that the acceleration at the <strong>gravity</strong> <strong>meter</strong> in(2) is denoted by ah <strong>and</strong> in (8) it is denoted bya’h, it can be seen that the two equations are identical.The gimbal supported <strong>gravity</strong> <strong>meter</strong> istherefore just as sensitive to errors in its <strong>stabilized</strong>reference as the <strong>stabilized</strong> <strong>platform</strong> mounted<strong>gravity</strong> <strong>meter</strong> is. There is no preference in thisrespect. Also it is obvious that gyros <strong>and</strong> accelero<strong>meter</strong>scould be substituted for the long periodpendulums in the gimbal system, which wouldresult in an improvement in performance.In order to attain the vertical accuracy requiredby equation (2), a satisfactory gyro erection systemhad to be designed for the <strong>stabilized</strong> <strong>platform</strong>.A diagram of the erection system is included inthe block diagram of Figure 3. There are twogyros, only one of which is shown. Each gyrocontrols its torque motor to make the <strong>stabilized</strong><strong>platform</strong> follow the gyro. This however, is notsufficient to insure verticality of a reference lineon the <strong>platform</strong> because: (1) the reference linemight not be vertical to begin with; (2) gyros havesome drift; <strong>and</strong> (3j the earth rotates <strong>and</strong> gyrostend to remain fixed in space. In order to attainverticality, accelero<strong>meter</strong>s or levels are mountedon the <strong>platform</strong> as shown. Ii the accelero<strong>meter</strong>s donot indicate level, they put out. error signals. Eacherror signal plus a constant times its integral is fedto the corresponding gyro to gradually precess itto bring the reference line on the platiorm tovertical.One of the main reasons ior using an integralterm in the feedback from the accelero<strong>meter</strong>s isthat it eliminates an error that woul~l otherwise bepresent because of the rotation of the earth. Theearth’s rotation requires an equal precession rateof the gyro in order to keep the <strong>platform</strong> vertical.This precession rate would require a constant errorsignal from the acceleromctcr if there were nointegral term in the feedback.The use of both error <strong>and</strong> integral of error in thefeedback gives a second order differential equation,<strong>and</strong> therefore the <strong>stabilized</strong> <strong>platform</strong> behavesexactly like a long period damped pendulum.The amount of integral feedback determinesthe natural period of oscillation of the <strong>stabilized</strong><strong>platform</strong> <strong>and</strong> the amount of ordinary feedbackdetermines its damping.The L & R gimbal supported <strong>shipboard</strong> <strong>gravity</strong><strong>meter</strong>s use long-period pendulums as verticalreferences; so again it is found that there is mathematicalequivalence between the old gimbal <strong>and</strong>new <strong>stabilized</strong> <strong>platform</strong> <strong>meter</strong>s. In the old modelssatisfactory results were obtained with pendulumsof about two minute periods. If the periods are tooshort, errors are introduced because of fishtailingof the ship <strong>and</strong> because of long period wave motions.If the periods are too long, the long-periodpendulums tend to drift, <strong>and</strong> transients introducedafter a ship turn became objectionable.Because of the greater stability of gyros ascompared to the long-period pendulums, it ispossible to use periods much longer than the previouslyused 2-minute periods. It is also possible toreduce the time of objectionable transients after aship turn by providing slewing switches to manuallybring the <strong>platform</strong> to approximate verticalafter the turn. Such slewing switches are providedin the new model <strong>and</strong> periods of either 4 or 6 min-
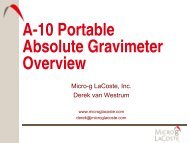
Stabilized Platform Shipboard Gravi<strong>meter</strong>-Design1031. GRAVITY METER UNIT2. STABLE TABLE3. GYRO4. HORIZONTAL ACCELEROMETERAUTOMATIC READERGRAVITY C~OMPUTERrSf? TENSIONCONTROLr-z2 CROSS: COUPLINGCOMPUTER5aiti$s ;-01r % 00 a00 w0aRDER1tI -SHORT PERIODFIG. 3. Block diagram of <strong>stabilized</strong> <strong>platform</strong> <strong>gravity</strong> <strong>meter</strong>.utes are made available merely by turning aselector switch.Since Z-minute periods were satisfactory in thepast, it was thought that 4-<strong>and</strong> 6.minute periodswould certainly be adequate if the ship’s trackwas reasonably straight. Furthermore, the availabilityof both 4- <strong>and</strong> 6-minute periods made possiblea test of the adequacy of the periods. If thesame values of <strong>gravity</strong> are obtained with bothperiods, then either period is adequate. Actual seatests showed the periods were adequate.Another requirement of the <strong>stabilized</strong> <strong>platform</strong>is that it be shock mounted in order to filter outship vibrations that might cause resonances in the<strong>gravity</strong> <strong>meter</strong> unit itself. Shockmounting a gimbalsupported <strong>gravity</strong> <strong>meter</strong> is simple because the
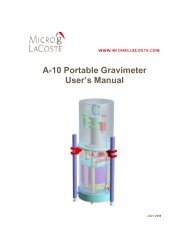
104 LaCoste, Clarkson, <strong>and</strong> Hamiltongimbal suspension itself filters out horizontalvibrations <strong>and</strong> there is no problem in adding aspring or shockcords to filter out vertical vibrations.However shockmounting a <strong>stabilized</strong> <strong>platform</strong>causes some difficulties because the servomotors controlling the <strong>platform</strong> need to bemounted on a firm base in order to act quickly. Ashockmounted base makes them act sluggishly<strong>and</strong> causes them to hunt.In order to overcome this problem, parallellinkages were installed between the shockmountedbase <strong>and</strong> the supporting frame fixed to the deck ofthe ship. These linkages are shown in the photographof the <strong>stabilized</strong> <strong>platform</strong> <strong>gravity</strong> <strong>meter</strong>,Figure 4. The linkages allow translation of theshockmounted base in any direction but preventrotation of it relative to the ship. The base thereforeprovides a good support for the servo motors.FIG. 4. Stabilized <strong>platform</strong> <strong>gravity</strong> <strong>meter</strong>.
106 LaCoste, Clarkson, <strong>and</strong> HamiltonFIG. 5. Diagram showinginherent typeof cross coupling.withst<strong>and</strong>ing rougher h<strong>and</strong>ling without gettingout of adjustment.A third improvement in the new <strong>gravity</strong> <strong>meter</strong>was to increase its damping to such an extent thatit can withst<strong>and</strong> vertical accelerations of f 0.5g ata period of 7 set without having interference betweenfixed <strong>and</strong> movable parts of the ‘<strong>gravity</strong><strong>meter</strong>. At a period of 3.5 set, the <strong>gravity</strong> <strong>meter</strong>will withst<strong>and</strong> vertical accelerations of t- lg. Thedamping was increased by a factor of 2 or 3 overthat of the earlier model.The increased damping also decreased theordinary cross coupling effect by the same factorbecause it reduced the motion of the beam by thatfactor.A fourth improvement was design <strong>and</strong> adjustmentchanges to reduce certain types of crosscoupling error that have not been considered todate. In order to underst<strong>and</strong> what was done, adiscussion of the cross coupling problem will begiven.One type of cross coupling has been known(LaCoste <strong>and</strong> Harrison, 1961) for several years.Although it has been described in the literature itis probably worthwhile to give an example of howit can cause an error in a <strong>gravity</strong> <strong>meter</strong>. Figure 5 isa diagram of a <strong>gravity</strong> <strong>meter</strong> being moved in acircular path in a vertical plane. If the <strong>gravity</strong><strong>meter</strong> is highly damped, its beam deflection willbe proportional to the negative of the verticalvelocity to which the <strong>gravity</strong> <strong>meter</strong> is subjected.The positions of the <strong>gravity</strong> <strong>meter</strong> beam willtherefore be as shown in the figure. The beam isassumed to be horizontal at the top <strong>and</strong> bottomwhere the vertical velocity is zero.The effect of the horizontal accelerations willnow be considered. At the right there is a centrifugalforce to the right, <strong>and</strong> since the <strong>gravity</strong> <strong>meter</strong>weight is above center, this force will produce aclockwise torque. At the left the centrifugal forceis to the left; but the weight is below center, <strong>and</strong>therefore the torque is again clockwise. Consequentlythe torque does not average out butmakes the beam move in a clockwise direction. Ifthe direction of the circular motion is reversed,the error will also be reversed.This cross coupling error is present even if the<strong>gravity</strong> <strong>meter</strong> is not overdamped, but in this casethe error occurs with a ramp motion rather thanwith a circular motion. The error can be eliminatedby keeping the beam accurately nulled orby using a <strong>gravity</strong> <strong>meter</strong> that has symmetryabout a vertical axis; otherwise the error is inherentin a <strong>stabilized</strong> <strong>platform</strong> <strong>gravity</strong> <strong>meter</strong>. Across coupling computer was therefore providedwith the new model <strong>gravity</strong> <strong>meter</strong>; it is shown inthe block diagram of Figure 3. It receives inputsof beam position <strong>and</strong> horizontal acceleration alongthe beam <strong>and</strong> it computes their product, which isa measure of the required inherent cross couplingcorrection. The output appears on the recorder sothat it can be corrected for. The correction canalso be made automatically to the <strong>gravity</strong> readingin the automatic reader if desired.It is interesting to note that a gimbal supported<strong>gravity</strong> <strong>meter</strong> is not subject to cross couplingerrors if the <strong>gravity</strong> <strong>meter</strong> is placed at the correctdistance below the gimbal joint. This “correctdistance” is the same distance that makes equation(3) correct for all periods. This adjustmentavoids cross coupling errors by eliminating allforces on the <strong>gravity</strong> <strong>meter</strong> except a force along itssensitive axis (LaCoste, 195Yb). The absence ofcross coupling effects in gimbal supported <strong>gravity</strong><strong>meter</strong>s is a real advantage over <strong>stabilized</strong> <strong>platform</strong><strong>gravity</strong> <strong>meter</strong>s, but the cross coupling effectis usually less than 20 mg <strong>and</strong> therefore a simplecross coupling computer can make adequatecorrections.The previously described cross coupling effectwill be called the inherent type, because it is inherentin certain types of <strong>gravity</strong> <strong>meter</strong>s. Thetypes of cross coupling about to be described aredue to imperfections in the <strong>gravity</strong> <strong>meter</strong> <strong>and</strong>
Stabilized Platform Shipboard Gravi<strong>meter</strong>-Design 107Ayj-\_ 3-at(LAverage Measured Gravity= (l/z)(L-Ai)(g-a)+(L+AL)(g+a1= Lg+ALaFIG. 6. Diagram showing an imperfection type of cross coupling.therefore will be called imperfection types. Theyoften have even greater magnitudes than theinherent type. On the other h<strong>and</strong> it is possible tomake the imperfection type negligible by carefuldesign <strong>and</strong> adjustment of the <strong>gravity</strong> <strong>meter</strong>.There are many ways in which imperfections cancause cross coupling errors, <strong>and</strong> it is often difficultto determine which is the major cause of error. Inorder to show how they can cause errors, twoexamples will be given.Figure 6 shows a <strong>gravity</strong> <strong>meter</strong> with a hingedbeam being moved up <strong>and</strong> down a r-amp. Therewill always be some elasticity in the Ilearn <strong>and</strong> inthe wires providing a hinge for it. This elasticitywill allow the center of <strong>gravity</strong> of t hc beam tomove horizontally in response to horizontal accelerations,thereby changing the moment arm ofthe beam. The moment arm on the right of thefigure can be denoted by L+AL <strong>and</strong> on the left itcan be denoted by L-AL. Also because of verticalacceleration the vertical force on the I)eam at theright will be g+a, where a is the vertical accelera-
Stabilized Platform Shipboard Gravi<strong>meter</strong>-Design 109Table 2. Main features of new L & R<strong>shipboard</strong> <strong>gravity</strong> <strong>meter</strong> unit1. Reduced yielding to lateral accelerations by a factorof 40 compared to earlier model.2. Linearity improved to reduce vertical accelerationerrors td less-than one mgal at vertical accelerationsof *0.1&?.3. Damping increased to permit operation at +O..5g ata 7 set period without interference between fixed <strong>and</strong>movable parts.4. Cross coupling computer for correcting inherent typeof cross coupling.5. Imperfection type of cross coupling made negligibleby careful design <strong>and</strong> adjustment.6. Simpler to operate <strong>and</strong> maintain than earlier modelNote: The accuracy at sea is discussed in the followingarticle by Nettleton <strong>and</strong> Lal’ehr.parts is as follows. A servo in the automaticreadercontrols the spring tension S to approximatelynull the beam position B of the <strong>gravity</strong><strong>meter</strong>. Theservo is made slow so that it will not followwave accelerations very much. Gravity is com-puted in the automatic reader from the springtension <strong>and</strong> the derivativetheof the beam positionafter some filtering. Gravity is then recorded on astrip chart recorder or tape recorder or both. Formonitoring, strip chart records arc made of thehorizontal accelerations <strong>and</strong> the Ilearn positionboth with <strong>and</strong> withoutfiltering.Tests of the new L & R <strong>stabilized</strong> <strong>platform</strong><strong>gravity</strong> <strong>meter</strong> have been made b!. GeophysicalAssociates International, by the LT. S. SavalOceanographic Office <strong>and</strong> by Dr. Rol<strong>and</strong> vonHuene of the Naval Ordnance l‘c,st Station atChina Lake, California. The results of the testsmade by Geophysical Associates internationalappear in the article following this article. Itappears that the new model give-. considerablybetter accuracy than the old model in addition tobeing able to operate in much rouglrcsr weather. Itis also very much simpler to opera t (a <strong>and</strong> to keepin adjustment.REFERENCESLaCoste, L. J. B., 1959a, Surface ship <strong>gravity</strong> measurementson the Texas A <strong>and</strong> M college ship, the“Hidalgo”: Geophysics, v. 24, p. 309-322.---, 1959b, U. S. Patent 2,899,826.LaCoste, L. J. B., 1961, U. S. Patent 2,9i7, 799.LaCoste, L. J. B., <strong>and</strong> Harrison, J. (‘., 1961, Sometheoretical considerations in the measurement of<strong>gravity</strong> at sea: Geophys. Jour. Royal AstronomicalSociety, v. 5, p. 89-103.