Data Sheet - Dunkermotoren
Data Sheet - Dunkermotoren
Data Sheet - Dunkermotoren

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
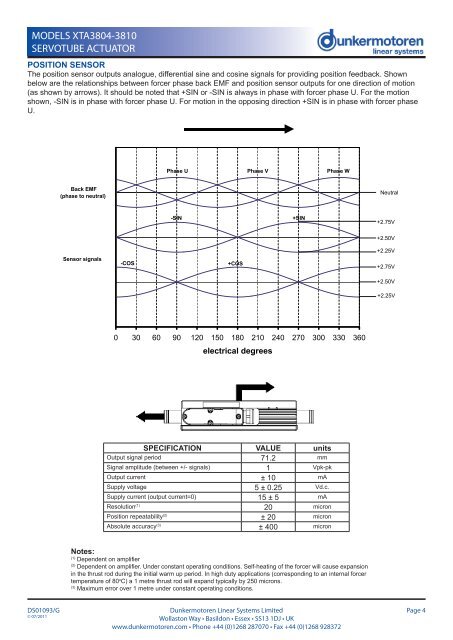
MODELS XTA3804-3810SERVOTUBE ACTUATORPOSITION SENSORThe position sensor outputs analogue, differential sine and cosine signals for providing position feedback. Shownbelow are the relationships between forcer phase back EMF and position sensor outputs for one direction of motion(as shown by arrows). It should be noted that +SIN or -SIN is always in phase with forcer phase U. For the motionshown, -SIN is in phase with forcer phase U. For motion in the opposing direction +SIN is in phase with forcer phaseU.Phase U Phase V Phase WBack EMF(phase to neutral)Neutral-SIN+SIN+2.75V+2.50VSensor signals-COS+COS+2.25V+2.75V+2.50V+2.25V0 30 60 90 120 150 180 210 240 270 300 330 360electrical degreesSPECIFICATION VALUE unitsOutput signal period 71.2 mmOutput signal period 71.2 mmSignal amplitude (between +/- signals) 1 Vpk-pkOutput current ± 10 mASupply voltage 5 ± 0.25 Vd.c.Supply current (output current=0) 15 ± 5 mAResolution (1) 20 micronPosition repeatability (2) ± 20 micronAbsolute accuracy (3) ± 400 micronNotes: -(1) Dependent on amplifier(2) Dependent on amplifier. Under constant operating conditions. Self-heating of the forcer will cause expansionin the thrust rod during the initial warm up period. In high duty applications (corresponding to an internal forcertemperature of 80 o C) a 1 metre thrust rod will expand typically by 250 microns.(3)Maximum error over 1 metre under constant operating conditions.(3)Maximum error over 1 metre under constant operating conditions.DS01093/G© 07/2011<strong>Dunkermotoren</strong> Linear Systems LimitedWollaston Way Way • Basildon • • Essex • SS13 • SS13 1DJ 1DJ • UK• UKwww.dunkermotoren.com • Phone • +44 (0)1268 287070 • Fax • Fax +44 +44 (0)1268 (0)1268 928372 928372Page 4