Three-sphere low-Reynolds-number swimmer near a wall
Three-sphere low-Reynolds-number swimmer near a wall
Three-sphere low-Reynolds-number swimmer near a wall
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
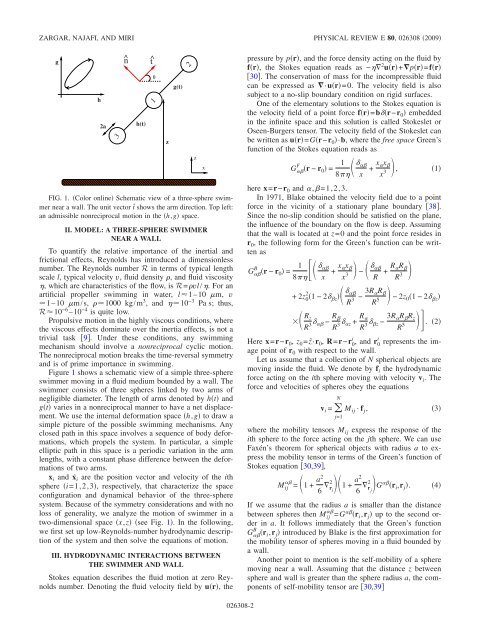
ZARGAR, NAJAFI, AND MIRIg^n ^th2a3II. MODEL: A THREE-SPHERE SWIMMERNEAR A WALLTo quantify the relative importance of the inertial andfrictional effects, <strong>Reynolds</strong> has introduced a dimensionless<strong>number</strong>. The <strong>Reynolds</strong> <strong>number</strong> R in terms of typical lengthscale l, typical velocity v, fluid density , and fluid viscosity, which are characteristics of the f<strong>low</strong>, is R=vl/. For anartificial propeller swimming in water, l1–10 m, v1–10 m/s, 1000 kg/m 3 , and 10 −3 Pa s; thus,R10 −6 –10 −4 is quite <strong>low</strong>.Propulsive motion in the highly viscous conditions, wherethe viscous effects dominate over the inertia effects, is not atrivial task 9. Under these conditions, any swimmingmechanism should involve a nonreciprocal cyclic motion.The nonreciprocal motion breaks the time-reversal symmetryand is of prime importance in swimming.Figure 1 shows a schematic view of a simple three-<strong>sphere</strong><strong>swimmer</strong> moving in a fluid medium bounded by a <strong>wall</strong>. The<strong>swimmer</strong> consists of three <strong>sphere</strong>s linked by two arms ofnegligible diameter. The length of arms denoted by ht andgt varies in a nonreciprocal manner to have a net displacement.We use the internal deformation space h,g to draw asimple picture of the possible swimming mechanisms. Anyclosed path in this space involves a sequence of body deformations,which propels the system. In particular, a simpleelliptic path in this space is a periodic variation in the armlengths, with a constant phase difference between the deformationsof two arms.x i and ẋ i are the position vector and velocity of the ith<strong>sphere</strong> i=1,2,3, respectively, that characterize the spaceconfiguration and dynamical behavior of the three-<strong>sphere</strong>system. Because of the symmetry considerations and with noloss of generality, we analyze the motion of <strong>swimmer</strong> in atwo-dimensional space x,z see Fig. 1. In the fol<strong>low</strong>ing,we first set up <strong>low</strong>-<strong>Reynolds</strong>-<strong>number</strong> hydrodynamic descriptionof the system and then solve the equations of motion.III. HYDRODYNAMIC INTERACTIONS BETWEENTHE SWIMMER AND WALLStokes equation describes the fluid motion at zero <strong>Reynolds</strong><strong>number</strong>. Denoting the fluid velocity field by ur, theh(t)θg(t)1 2FIG. 1. Color online Schematic view of a three-<strong>sphere</strong> <strong>swimmer</strong><strong>near</strong> a <strong>wall</strong>. The unit vector tˆ shows the arm direction. Top left:an admissible nonreciprocal motion in the h,g space.zzxpressure by pr, and the force density acting on the fluid byfr, the Stokes equation reads as − 2 ur+pr=fr30. The conservation of mass for the incompressible fluidcan be expressed as ·ur=0. The velocity field is alsosubject to a no-slip boundary condition on rigid surfaces.One of the elementary solutions to the Stokes equation isthe velocity field of a point force fr=br−r 0 embeddedin the infinite space and this solution is called Stokeslet orOseen-Burgers tensor. The velocity field of the Stokeslet canbe written as ur=Gr−r 0 ·b, where the free space Green’sfunction of the Stokes equation reads asG F r − r 0 = 18 x+ x x x 3 , 1here x=r−r 0 and ,=1,2,3.In 1971, Blake obtained the velocity field due to a pointforce in the vicinity of a stationary plane boundary 38.Since the no-slip condition should be satisfied on the plane,the influence of the boundary on the f<strong>low</strong> is deep. Assumingthat the <strong>wall</strong> is located at z=0 and the point force resides inr 0 , the fol<strong>low</strong>ing form for the Green’s function can be writtenasG B r − r 0 = 18 xPHYSICAL REVIEW E 80, 026308 2009+2z 0 2 1−2 z + x x x 3 − R + R R R 3R 3 − 3R R R 5 −2z 0 1−2 z R zR 3 − R R 3 z + R R 3 z − 3R R R zR 5 . 2Here x=r−r 0 , z 0 =ẑ·r 0 , R=r−r i i0 , and r 0 represents the imagepoint of r 0 with respect to the <strong>wall</strong>.Let us assume that a collection of N spherical objects aremoving inside the fluid. We denote by f i the hydrodynamicforce acting on the ith <strong>sphere</strong> moving with velocity v i . Theforce and velocities of <strong>sphere</strong>s obey the equationsNv i = M ij · f j ,3j=1where the mobility tensors M ij express the response of theith <strong>sphere</strong> to the force acting on the jth <strong>sphere</strong>. We can useFaxén’s theorem for spherical objects with radius a to expressthe mobility tensor in terms of the Green’s function ofStokes equation 30,39,M ij =1+ a26 r21+ a2i 6 r2G rji ,r j . 4If we assume that the radius a is smaller than the distancebetween <strong>sphere</strong>s then M ij =G r i ,r j up to the second orderin a. It fol<strong>low</strong>s immediately that the Green’s functionG B r i ,r j introduced by Blake is the first approximation forthe mobility tensor of <strong>sphere</strong>s moving in a fluid bounded bya <strong>wall</strong>.Another point to mention is the self-mobility of a <strong>sphere</strong>moving <strong>near</strong> a <strong>wall</strong>. Assuming that the distance z between<strong>sphere</strong> and <strong>wall</strong> is greater than the <strong>sphere</strong> radius a, the componentsof self-mobility tensor are 30,39026308-2