Steerable Needle Conor James Walsh - Grand Challenge Stories
Steerable Needle Conor James Walsh - Grand Challenge Stories
Steerable Needle Conor James Walsh - Grand Challenge Stories
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
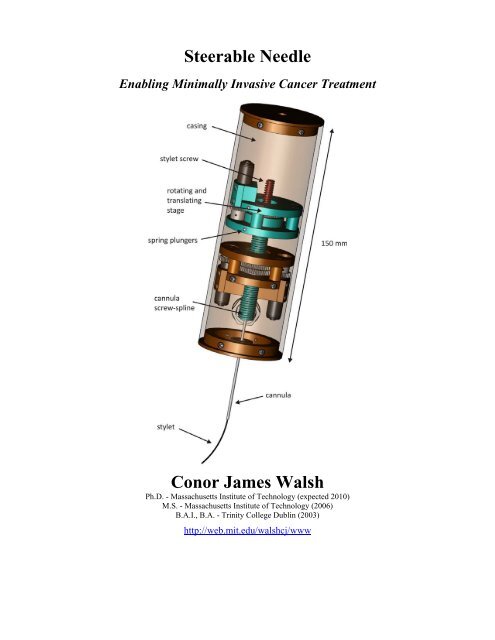
<strong>Steerable</strong> <strong>Needle</strong>Enabling Minimally Invasive Cancer Treatment<strong>Conor</strong> <strong>James</strong> <strong>Walsh</strong>Ph.D. - Massachusetts Institute of Technology (expected 2010)M.S. - Massachusetts Institute of Technology (2006)B.A.I., B.A. - Trinity College Dublin (2003)http://web.mit.edu/walshcj/www
<strong>Conor</strong> <strong>James</strong> <strong>Walsh</strong>Opportunity:Thermal ablation is an emerging cancer therapy that is substantially cheaper and less invasivethan other methods because it uses localized heat to destroy tumor. However, applying heat toa specific location is difficult because of non-uniform heat transfer from an electrode. Thisimprecision frequently results in a failure to destroy a tumor or damage to healthy tissue(Figure 5).Figure 5: On the left, the small burn volume associated with a single radiofrequency ablation probe is shown.While the temperature at the tip is 100 C (cannot exceed this because boiling occurs), it drops off rapidly andthus does not destroy the entire tumor. On the right a larger spherical ablation volume is shown that is generatedwith a multi-probe electrode; however this results in a large amount of damage to healthy tissue.Invention:To address this limitation, I conceived the idea to steer an electrode tip to burn multiple pointsin a tumor and then conceptualized, designed and built the first robot capable of achievingthis 1 .Figure 6: The concept of robotically steering a radiofrequency ablation probe is shown by the three adjacent burnvolumes labeled 1,2 and 3. With smaller burn volumes, much faster and more effective destruction of the tumorcan be achieved without the need to damage the surrounding healthy tissue.1 <strong>Walsh</strong>, C., Franklin, J., Slocum, A., Guerrero, J., Gupta, R. Image-guided Telerobot for Percutaneous DistalTip Repositioning, IEEE Transactions on Robotics, (in preparation).
<strong>Conor</strong> <strong>James</strong> <strong>Walsh</strong>Figure 7: In (A) the concept of achieving steering with a stylet with a pre-curved distal portion and a concentricouter cannula is shown. When the stylet is inside the cannula it is substantially straightened but once it isdeployed it will deflect laterally and assume its pre-curved shape. In (B) the novel mechanism for actuating theneedle steering robot is shown. The proximal end of the cannula is attached to the distal end of a screw-splinethat enables it to be translated and rotated with respect to the casing. Translation of the stylet relative to thecannula is achieved with a second threaded screw with a splined groove.Figure 8: In (A) the working prototype of the needle steering robot is shown next to a quarter for scale. Themechanism shown in Figure 7 is contained within the sterile white plastic cylinder. The stylet is shown fullydeployed from the cannula. In (B) three images show needle steering in operation while being imaged by the CTscanner. The change in position and rotation of the mechanism can be seen to drive the cannula and stylet.Impact:This invention makes it possible to replace $20,000, highly-invasive surgical procedures with2-3 hour out-patient procedures. The optimal treatment of lesions can be calculated usingsoftware algorithms and then performed by the robot, enabling destruction of only the tumor,thus preserving surrounding healthy tissue.