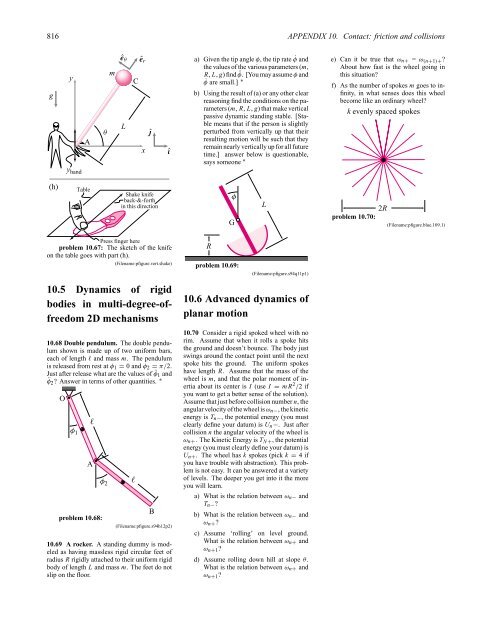
Problems for Chapter 10 815After Collisiong = 9.81 m/secBACproblem 10.62:h maxBefore collision(dotted lines)BlFrictionlessV oA(Filename:pfigure.blue.137.3)10.63 A double pendulum is made of two uniformrigid rods, each of length l. Thefirst rodis massless. Find equations of motion for thesecond rod. Define any variables you use inyour solution.mmproblem 10.63:mmassless(Filename:pfig2.1.rp10)10.64 A model of walking involves two straightlegs. During the part of the motion when onefoot is on the ground, the system looks likethe picture in the figure, confined <strong>to</strong> motion inthe x − y plane. Write two equations fromwhich one could find ¨θ 1 , <strong>and</strong> ¨θ 2 givenθ 1 ,θ 2 , ˙θ 1 , ˙θ 2 <strong>and</strong> all mass <strong>and</strong> length quantities.⎡⎤Hint:∑ ⇀ ˙⇀⎣ M/A = H /A whole system ⎦∑ ⇀ ˙⇀M/B = H /B for bar BCygAproblem 10.64:Bθ 1θ 2αxC(Filename:pfigure.blue.100.1)10.4 Advanced problems in2D motion10.65 A pendulum is hanging from a movingsupport in the xy-plane. The support movesin a known way given by ⇀ r (t) = r(t)î. Forthe following cases, find a differential equationwhose solution would determine θ(t), measuredclockwise from vertical; then find an expressionfor d 2 θ/dt 2 in terms of θ <strong>and</strong> r(t):a) with no gravity <strong>and</strong> assuming the pendulumrod is massless with a point massof mass m at the end,b) as above but with gravity,c) assuming the pendulum is a uniform rodof mass m <strong>and</strong> length l.10.66 Robotics problem: balancing a broomstick by sideways motion. Try <strong>to</strong> balance abroom stick by moving your h<strong>and</strong> horizontally.Model your h<strong>and</strong> contact with the broom as ahinge. You can model the broom as a uniformstick or as a point mass at the end of a stick —your choice.a) Equation of motion. Given the accelerationof your h<strong>and</strong> (horizontal only),the current tip, <strong>and</strong> the rate of tip of thebroom, find the angular acceleration ofthe broom. ∗gb) Control? Can you find a h<strong>and</strong> accelerationin terms of the tip <strong>and</strong> the tiprate that will make the broom balanceupright? ∗yφAproblem 10.66:mLê θCêrx(Filename:pfigure.s94h10p5)10.67 Balancing the broom again: verticalshaking works <strong>to</strong>o. You can balance a broomby holding it at the bot<strong>to</strong>m <strong>and</strong> applying appropriate<strong>to</strong>rques, as in problem 7.99 or by movingyour h<strong>and</strong> back <strong>and</strong> forth in an appropriatemanner, as in problem 10.66. In this problem,you will <strong>to</strong> try <strong>to</strong> balance the broom differently.The lesson <strong>to</strong> be learned here is more subtle,<strong>and</strong> you should probably just wonder at it ratherthan try <strong>to</strong> underst<strong>and</strong> it in detail.In the previous balancing schemes, youused knowledge of the state of the broom (θ<strong>and</strong> ˙θ) <strong>to</strong> determine what corrective action <strong>to</strong>apply. Now balance the broom by moving itin a way that ignores what the broom is doing.In the language of robotics, what youhave been doing before is ‘closed-loop feedback’control. The new strategy, which is simultaneouslymore simple minded <strong>and</strong> moresubtle, is an ‘open loop’ control. Imagine thatyour h<strong>and</strong> connection <strong>to</strong> the broom is a hinge.a) Picture <strong>and</strong> model. Assume your h<strong>and</strong>oscillates sinusoidally up <strong>and</strong> downwith some frequency <strong>and</strong> some amplitude.The broom is instantaneously atsome angle from vertical. Draw a picturewhich defines all the variables youwill use. Use any mass distribution thatyou like.b) FBD. Draw a FBD of the broom.c) Momentum balance. Write the equationof angular momentum balanceabout the point instantaneously coincidingwith the hinge.d) Kinematics. Use any geometry <strong>and</strong>kinematics that you need <strong>to</strong> evaluatethe terms in the angular momentum balanceequation in terms of the tip angle<strong>and</strong> its time derivatives <strong>and</strong> other knownquantities (take the vertical motion ofyour h<strong>and</strong> as ‘given’). [Hint: There aremany approaches <strong>to</strong> this problem.]e) Equation of motion. Using the angularmomentum balance equation, writea governing differential equation for thetip angle. ∗f) Simulation. Taking the h<strong>and</strong> motionas given, simulate on the computer thesystem you have found.g) Stability? Can you find an amplitude<strong>and</strong> frequency of shaking so that thebroom stays upright if started from anear upright position? You probablycannot find linear equations <strong>to</strong> solvethat will give you a control strategy.So, this problem might best be solvedby guessing on the computer. Successfulstrategies require the h<strong>and</strong> acceleration<strong>to</strong> be quite a bit bigger than g,the gravitational constant. The stabilityobtained is like the stability of anundamped uninverted pendulum — oscillationspersist. You improve the stabilitya little by including a little frictionin the hinge.h) Dinner table experiment for nerdyeaters. If you put a table knife on atable <strong>and</strong> put your finger down on thetip of the blade, you can see that thisexperiment might work. Rapidly shakeyour h<strong>and</strong> back <strong>and</strong> forth, keeping theknife from sliding out from your fingerbut with the knife sliding rapidly on thetable. Note that the knife aligns withthe direction of shaking (use scratchresistantsurface). The knife is differentfrom the broom in some importantways: there is no gravity trying <strong>to</strong> ‘unalign’it <strong>and</strong> there is friction betweenthe knife <strong>and</strong> table that is much moresignificant than the broom interactionwith the air. Nonetheless, the experimentshould convince you of the plausibilityof the balancing mechanism.Because of the large accelerations required,you cannot do this experimentwith a broom.
816 APPENDIX 10. Contact: friction <strong>and</strong> collisionsgyy h<strong>and</strong>Aθmê θLêrCĵxîa) Given the tip angle φ, the tip rate ˙φ <strong>and</strong>the values of the various parameters (m,R, L, g) find ¨φ. [You may assume φ <strong>and</strong>˙φ are small.] ∗b) Using the result of (a) or any other clearreasoning find the conditions on the parameters(m, R, L, g) that make verticalpassive dynamic st<strong>and</strong>ing stable. [Stablemeans that if the person is slightlyperturbed from vertically up that theirresulting motion will be such that theyremain nearly vertically up for all futuretime.] answer below is questionable,says someone ∗e) Can it be true that ω n+ = ω (n+1)+ ?About how fast is the wheel going inthis situation?f) As the number of spokes m goes <strong>to</strong> infinity,in what senses does this wheelbecome like an ordinary wheel?k evenly spaced spokes(h)TableShake knifeback-&-forthin this directionφGL2Rproblem 10.70:(Filename:pfigure.blue.109.1)Press finger hereproblem 10.67: The sketch of the knifeon the table goes with part (h).(Filename:pfigure.vert.shake)10.5 Dynamics of rigidbodies in multi-degree-offreedom2D mechanisms10.68 Double pendulum. The double pendulumshown is made up of two uniform bars,each of length l <strong>and</strong> mass m. The pendulumis released from rest at φ 1 = 0 <strong>and</strong> φ 2 = π/2.Just after release what are the values of ¨φ 1 <strong>and</strong>¨φ 2 ? Answer in terms of other quantities. ∗Olφ 1Aφ 2problem 10.68:lB(Filename:pfigure.s94h12p2)10.69 A rocker. A st<strong>and</strong>ing dummy is modeledas having massless rigid circular feet ofradius R rigidly attached <strong>to</strong> their uniform rigidbody of length L <strong>and</strong> mass m. The feet do notslip on the floor.Rproblem 10.69:(Filename:pfigure.s94q11p1)10.6 Advanced dynamics ofplanar motion10.70 Consider a rigid spoked wheel with norim. Assume that when it rolls a spoke hitsthe ground <strong>and</strong> doesn’t bounce. The body justswings around the contact point until the nextspoke hits the ground. The uniform spokeshave length R. Assume that the mass of thewheel is m, <strong>and</strong> that the polar moment of inertiaabout its center is I (use I = mR 2 /2ifyou want <strong>to</strong> get a better sense of the solution).Assume that just before collision number n, theangular velocity of the wheel is ω n− , the kineticenergy is T n− , the potential energy (you mustclearly define your datum) is U n −. Just aftercollision n the angular velocity of the wheel isω n+ . The Kinetic Energy is T N+ , the potentialenergy (you must clearly define your datum) isU n+ . The wheel has k spokes (pick k = 4ifyou have trouble with abstraction). This problemis not easy. It can be answered at a varietyof levels. The deeper you get in<strong>to</strong> it the moreyou will learn.a) What is the relation between ω n− <strong>and</strong>T n− ?b) What is the relation between ω n− <strong>and</strong>ω n+ ?c) Assume ‘rolling’ on level ground.What is the relation between ω n+ <strong>and</strong>ω n+1 ?d) Assume rolling down hill at slope θ.What is the relation between ω n+ <strong>and</strong>ω n+1 ?