

Electronic Slot Car Controller Mysteries Revealed - JayGee Racing
Electronic Slot Car Controller Mysteries Revealed - JayGee Racing
Electronic Slot Car Controller Mysteries Revealed - JayGee Racing

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Electronic</strong> <strong>Slot</strong> <strong>Car</strong> <strong>Controller</strong> <strong>Mysteries</strong> <strong>Revealed</strong><br />
Build Your Own for Less Than $100<br />
by Jeff Goldberg<br />
<strong>JayGee</strong> <strong>Racing</strong><br />
www.jaygeeracing.com<br />
© 2005 Jeff Goldberg<br />
There are three popular approaches to building a modern electronic slot car controller. Depending<br />
on the manufacturer’s cost/feature targets, manufacturing considerations and expected sales<br />
volume, electronic controllers can be built with diodes, linear power transistors or switched<br />
mosfets. In this article, I’ll explain the theory behind power transistor and mosfet based<br />
controllers, then show you how to build the controller shown below using components easily<br />
obtainable by hobbyists. Later, I’ll show you how to add a mush button, power relay and even<br />
modify it for negative wired tracks. Anyone that has a basic understanding of electricity and<br />
soldering skills developed enough to maintain their own cars can easily follow along. And you<br />
engineers and technicians out there – please excuse the generalities and simplifications, this ain’t<br />
college.<br />
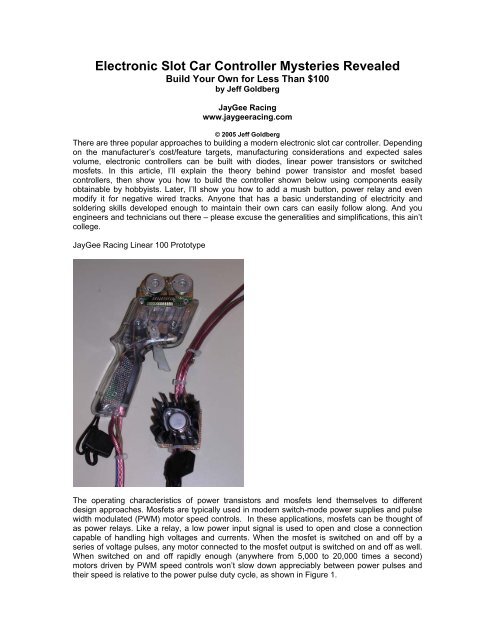
<strong>JayGee</strong> <strong>Racing</strong> Linear 100 Prototype<br />
The operating characteristics of power transistors and mosfets lend themselves to different<br />
design approaches. Mosfets are typically used in modern switch-mode power supplies and pulse<br />
width modulated (PWM) motor speed controls. In these applications, mosfets can be thought of<br />
as power relays. Like a relay, a low power input signal is used to open and close a connection<br />
capable of handling high voltages and currents. When the mosfet is switched on and off by a<br />
series of voltage pulses, any motor connected to the mosfet output is switched on and off as well.<br />
When switched on and off rapidly enough (anywhere from 5,000 to 20,000 times a second)<br />
motors driven by PWM speed controls won’t slow down appreciably between power pulses and<br />
their speed is relative to the power pulse duty cycle, as shown in Figure 1.
Figure 1. PWM Speed Control Power Pulses<br />
Duty Cycle<br />
100%<br />
75%<br />
50%<br />
25%<br />
0%<br />
12 V<br />
O V<br />
12 V<br />
O V<br />
12 V<br />
O V<br />
12 V<br />
O V<br />
12 V<br />
O V<br />
Motor Speed<br />
<strong>Car</strong>e must be taken to pulse the motor at a high enough frequency. If the frequency is too low,<br />
the motor begins to slow down between pulses, hums excessively and run hot. However, it’s not<br />
always practical to run a PWM speed control at higher frequencies (e.g. 20 kHz and above).<br />
Mosfets heat up more when switched at higher frequencies and so do the control circuits, which<br />
results in a more power hungry and expensive speed control.<br />
The mosfet input pulses are created and their width is controlled (or modulated, in engineering<br />
speak) by complex integrated circuits (ICs). Although the ICs are complex, they are relatively<br />
inexpensive, offer precise control of the pulse width, consume very little power and can generate<br />
sophisticated motor acceleration and braking curves under the control of simple, low cost<br />
microcontrollers. The ICs do require additional support components such as resistors and<br />
capacitors, mosfet drivers, voltage regulators and/or reverse battery protection circuits (ICs<br />
smoke instantly when hooked up backwards).<br />
PWM speed controls are very energy efficient, in large part because the mosfet consumes very<br />
little power. Once turned completely on, a mosfet’s resistance is very low (typically 0.010 ohms or<br />
less). The resulting voltage drop across the mosfet is low even when conducting large currents.<br />
Once turned completely off, the voltage drop is high, but no current is flowing. Since Power =<br />
voltage drop x current, mosfets only consume power and generate heat during the time their<br />
output is swinging from on to off and vice versa (which is why mosfets run hotter at higher<br />
switching frequencies).<br />
This efficiency is important in many applications, such as in an RC car speed control. Efficiency<br />
affects the size and weight of the speed control itself (less heat permits smaller & lighter heat<br />
sinks) as well as how long the car can run at full speed before the batteries dump.<br />
As far as slot car racing is concerned, this efficiency enables a manufacturer to produce a<br />
controller with all of the components, including the high current carrying mosfets, mounted on a<br />
single circuit board that fits inside the handle. This allows the manufacturer to reduce assembly<br />
costs by using automated circuit board manufacturing processes, important in higher volume<br />
products. Also, little fingers can’t be burned by touching a hot heatsink, which may be an<br />
important factor to folks concerned about product liability issues.
A second approach to building a slot car controller is based on using power transistors. Power<br />
transistors are current amplifiers. The design of the circuit using the transistor, and the way it’s<br />
connected to its load, ultimately determines whether the circuit is amplifying current and/or<br />
voltage. Instead of just switching on-off like mosfets, the transistor’s output follow the shape of its<br />
input, except with larger current and/or voltage swings. Figure 2 shows the inputs and outputs of<br />
a linear speed control circuit that has a maximum output of 12 volts and a voltage gain of 4x (the<br />
output voltage is always 4 times the input voltage, up to 12 volts, max).<br />
Figure 2. Linear Speed Control Inputs and Outputs<br />
Input<br />
Output<br />
3 V<br />
O V<br />
12 V<br />
9 V<br />
6 V<br />
3 V<br />
O V<br />
Transistor Voltage Drop<br />
Voltage to Motor<br />
Power transistors generate more heat than mosfets because the transistor spends a significant<br />
amount of its time in its linear operating zone, where the output voltage is somewhere between<br />
zero and the maximum track voltage. In this zone, any voltage not delivered to the motor is<br />
dropped across the transistor as shown in Figure 2, even though the transistor may be<br />
conducting high currents. The resulting power is converted to heat which must be dissipated by<br />
large, heavy heat sinks that are often external to the controller handle.<br />
So why build a slot car controller with power transistors? The control circuits for a power<br />
transistor based slot car controller are very simple, requiring nothing more than a few pennies<br />
worth of resistors. Voltage regulators, voltage boosters, capacitors and reverse battery protection<br />
circuits are not required. A minimal number of solder connections are required, important when<br />
hand assembling circuit boards produced in low volume or building your own controller using<br />
prototyping boards.<br />
Also, the efficiency of a PWM circuit isn’t required in a slot car controller. Enthusiasts buy highend<br />
controllers even though they have heavy, bulky external heat sinks or power modules. These<br />
controllers typically have a set of bypass contacts so extremely low mosfet resistance isn’t<br />
required to deliver full power to the motor. And, since a slot car doesn’t carry around its own<br />
batteries, extending battery life isn’t an issue - if they dump, they dump for everyone.
Voltage (%)<br />
Let’s take a closer look at the design of a power transistor based controller. When starting any<br />
design project, you need to have a set of design goals. Mine were quite simple:<br />
1. Linear trigger response across the entire trigger sensitivity range<br />
2. Low current control circuit to minimize wiper arcing and resistor size<br />
3. Trigger sensitivity does not change even if brake fuse blows<br />
4. Suitable for GP12 motors on fiendishly tight, twisty flat tracks (Adding a larger heatsink<br />
for Eurosports would be acceptable, if required)<br />
5. Works on positive-wired tracks<br />
6. Fully adjustable brake strength and trigger sensitivity<br />
As far as design constraints were concerned, the controller mechanicals were to be based on the<br />
Parma Turbo. The other components needed to be standard products, readily available from<br />
multiple online or catalog distributors and can be purchased in low quantities.<br />
So what is linear trigger response? If you were to measure the voltage supplied to the motor for<br />
each trigger position and plotted the points on a graph, you’d be able to connect all of the points<br />
with a straight, or nearly straight, line as shown in Figure 3a (The output voltage is represented as<br />
a percentage of track voltage to eliminate differences between track power supplies). You’ll notice<br />
that, after the initial voltage jump as the trigger comes off the brake pad, the voltage progresses<br />
in a straight line and voltage step between each trigger position is about same (or close enough<br />
that it’s not noticeable by the driver). Drivers using a controller with this response confirmed that<br />
car/controller felt responsive across the entire trigger movement.<br />
Figure 3a. Linear Trigger Response Figure 3b. Non-Linear Trigger Response<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Trigger Position<br />
Measured<br />
Voltage<br />
Voltage (%)<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Trigger Position<br />
Measured<br />
Voltage<br />
Ideal Linear<br />
Response<br />
In contrast, the trigger response in Figure 3b is far from linear. As before, the measured track<br />
voltage is represented in red, with the blue line showing what the response would have been if it<br />
was linear. Notice that the measured voltage steps are irregular. The voltage changes less than<br />
30% as the trigger moves from position 1 to position 6, but jumps a whopping 40% as the trigger<br />
moves only 2 positions further (from position 6 to 8).<br />
It’s not surprising that many drivers reported that the car/controller felt mushy and unresponsive<br />
to trigger position in the bottom and mid range bands and twitchy in the top bands. This correlates<br />
to the voltage measurements. Had the trigger response been linear, following the blue line, the<br />
car may not have the desired “snap” out of the corner due to the low starting voltage but it would<br />
have been much more drivable.<br />
Ideally, the trigger sensitivity adjustment should only affect the initial voltage jump as the trigger<br />
comes off the brake pad. The voltage should then progress from there in a straight line to 100%<br />
as the trigger is pulled back, regardless of the sensitivity setting. However, that was not the case<br />
for the controller used to generate the graphs in Figure 3. When the trigger sensitivity was set to<br />
max, the controller had a nice linear response as shown in Figure 3a. As the trigger sensitivity
was reduced to its minimum, the trigger response became more and more non-linear until it<br />
eventually took on the response shown in Figure 3b. Drivers using this controller would<br />
sometimes have to find a compromise between the desired trigger sensitivity and trigger<br />
response. Since this was becoming an issue for me on flat tracks, it became my highest priority<br />
when designing the controller described in this article.<br />
Figure 4. <strong>JayGee</strong> <strong>Racing</strong> <strong>Slot</strong> <strong>Car</strong> Motor Control Circuit, Positive Wired Tracks<br />
R1 33 Ohm<br />
R2 33 Ohm<br />
R3 33 Ohm<br />
R4 33 Ohm<br />
R5 33 Ohm<br />
R6 33 Ohm<br />
R7 33 Ohm<br />
R8 33 Ohm<br />
R9 33 Ohm<br />
R10 33 Ohm<br />
R11 33 Ohm<br />
WIPER<br />
BOARD<br />
Pad 14<br />
Pad 3<br />
Pad 1<br />
R12 100 Ohm<br />
1 3 P1<br />
Increased<br />
Sensitivity<br />
SENSITIVITY POT 500 Ohm<br />
2<br />
B<br />
WIPER ARM<br />
C<br />
E<br />
1<br />
3<br />
PWR FUSE 20 A<br />
Q1<br />
2N6284<br />
2<br />
D1<br />
1N5400<br />
BRAKE POT 5 Ohm<br />
BRAKE FUSE 5 A<br />
Title<br />
FULL POWER CONTACT<br />
Closes when wiper<br />
arm is on PAD 14<br />
BRAKE CONTACT<br />
Closes when wiper<br />
arm is on PAD 1<br />
WHITE<br />
+<br />
TRACK POWER<br />
MOTOR<br />
RED<br />
<strong>JayGee</strong> <strong>Racing</strong> <strong>Slot</strong> <strong>Car</strong> Motor Control Circuit Positive Wired Track<br />
Size Document Number Rev<br />
A A<br />
Date: Saturday, March 13, 2004 Sheet 1 of 1<br />
The controller is based on the circuit in Figure 4. It consists of a voltage divider with taps for the<br />
controller wiper and a pot for trigger sensitivity, a power module consisting of a power transistor<br />
and diode, turbo controller brake and full power contacts (represented as two switches to make<br />
the schematic easier to read), and a brake pot with fuses.<br />
The circuit is called a voltage follower, for reasons that will become quickly apparent. Once the<br />
voltage on the wiper rises above 0V, the transistor begins to conduct. When that happens, the<br />
voltage applied to the motor rises from 0V to a level just below that of the wiper. The motor<br />
voltage moves in lockstep with the wiper voltage, following along as the wiper moves from tap to<br />
tap.<br />
Although the voltages at the wiper and the motor are virtually the same, the currents through<br />
each are very different. Since the transistor is a current amplifier, the base current (the current<br />
flowing from the transistor’s base (B) to its emitter (E)) is just a very small fraction of the current<br />
flowing from the transistor’s collector (C) to its emitter. This means that very low currents are<br />
drawn through the wiper even when large currents are drawn by the motor.<br />
BLACK<br />
1<br />
2
There are many different transistors available to choose from, each one having different current<br />
amplification capabilities, voltage ratings, power ratings etc. From looking at the schematic, it<br />
appears that two transistors are used. That’s not the case. A Darlington power transistor, made<br />
up of two transistors internally, was chosen for this design due to its high current amplification<br />
capability. The result is a base current much lower than if a standard power transistor were used.<br />
A very low base current was critical to this design. If a significant amount of current entering R1 at<br />
the top of the voltage divider was diverted by the wiper to supply the base current, then more<br />
current would flow through the resistors above the wiper arm position, than below it. Since I<br />
wanted to limit the current flowing through the resistors to about 40mA to minimize wiper arcing<br />
and, for reasons that I’ll explain shortly, wanted the current flowing through all of the resistors to<br />
be virtually equal, the base current couldn’t be more than a small fraction of a milliamp.<br />
As long the current flowing through the all the resistors was equal, the voltage drops across equal<br />
valued resistors in the voltage divider would also be equal (voltage = current x resistance). Since<br />
resistors R1 thru R11 are equal, the voltage steps, starting at PAD3 and progressing up to<br />
PAD14, would be equal as well. The initial voltage step from PAD1 to PAD3 is determined by R12<br />
and the trigger sensitivity pot. (Ignore the fact the PAD2 is left floating, before the wiper button<br />
comes off PAD1, it’s already touching PAD3 – more details later.)<br />
The percentage of track voltage at any tap in the voltage divider is determined by the following<br />
equation:<br />
Where:<br />
(eq1) % Voltage = RTAP + P<br />
(11 x R) + R12 + P<br />
x 100<br />
RTAP = Resistance between the tap and pin 1 of the trigger sensitivity pot<br />
P = Resistance between pins 1 and 2 of P1, the trigger sensitivity pot<br />
R = Resistor value of R1, R2, R3…R11<br />
R12 = Resistor value of R12<br />
So what’s math doing in a slot car magazine? (Kid’s take note, your teachers are right when they<br />
say graphing is practical). When you plug the resistor values into this equation and set the trigger<br />
sensitivity to minimum (P = 0), the minimum initial voltage step as the wiper button comes off<br />
PAD1 is:<br />
(eq2) % Voltage =<br />
100<br />
x 100 = 22%<br />
(11 x 33) + 100 + 0<br />
When you set the trigger sensitivity to maximum (P=500), the initial voltage step increases to:<br />
(eq3) % Voltage = 100 + 500 x 100 = 62%<br />
(11 x 33) + 100 + 500<br />
When the wiper voltage is plotted as a function of the trigger position (RTAP) the response is<br />
linear, as shown in Figure 5. The motor voltage will be very similar, with the addition of a small<br />
step as the full power contact closes, bypassing the power transistor. The minimum trigger<br />
sensitivity is determined by R12, with increased sensitivity added by P1. Increasing the resistance<br />
of R12 increases the minimum sensitivity, while using a higher resistance potentiometer<br />
increases the additional sensitivity that can be added.
Figure 5. Wiper Voltage Response<br />
Voltage (%)<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
P1 Step<br />
R12 Step<br />
0 1 2 3 4 5 6 7 8 9 10 11 12<br />
Trigger Position<br />
Min Sensitivity<br />
Max Sensitivity<br />
The next step was to determine the wattage of the voltage divider resistors. Assuming a<br />
maximum track voltage of 18V, the maximum current through the voltage divider is:<br />
Maximum Current = 18/463 = 0.039 A.<br />
The power consumption of each 33 ohm resistor is:<br />
Wattage = (0.039 x 0.039) x 33 = 0.052 W.<br />
Since this is less than 0.125 W, 1/8 th watt resistors can be used for R1-R11<br />
The power consumption of R12 is:<br />
Wattage = (0.039 x 0.039) x 100 = 0.152 W<br />
Since this is less than 0.250 W, R12 could be a 1/4 th watt resistor<br />
Although the power consumption of P1 was also quite small, I chose to use a 2 watt wirewound<br />
pot instead of a lower wattage trim pot. Trim pots are meant to be set and forgotten, whereas I<br />
wanted a heavier duty pot that would not wear out after frequent adjustments and, at about 3<br />
bucks, the price was right.<br />
Now let’s take a look at the power module. Transistor Q1 is rated to handle a constant 20A<br />
current with a 40A current surge (provided it’s kept cool enough by the heatsink). When the<br />
transistor is turned off by the wiper contacting PAD1, diode D1 protects the transistor by providing<br />
a current path from the spinning motor (now a generator) back to the battery during the short<br />
interval before the brake contact closes. Otherwise, the spinning motor would attempt to drive<br />
current though the transistor from the emitter (E) to the collector (C), damaging it.<br />
The fuses are readily available automotive ATO type blade fuses – 20A for the power fuse and<br />
5A for the brake. Notice that the brake fuse is in series with the brake pot, but not the voltage<br />
divider resistors. If the brake fuse was in series with the voltage divider resisters and it blew (or if<br />
the RED wire was disconnected from the track), more current would flow though the wiper and<br />
into the transistor base than desired. The circuit would no longer act as a voltage follower.<br />
Instead, the trigger sensitivity would shoot through the roof, while at the same time – the car<br />
would have no brakes.<br />
What if I wanted to add a mush button, full power relay or even modify the controller to work on a<br />
negative polarity track? The circuit in Figure 6 does just that.
Figure 6. Motor Control Circuit with Mush Button and Power Relay, Negative Wired Tracks<br />
R1 33 Ohm<br />
R2 33 Ohm<br />
R3 33 Ohm<br />
R4 33 Ohm<br />
R5 33 Ohm<br />
R6 33 Ohm<br />
R7 33 Ohm<br />
R8 33 Ohm<br />
R9 33 Ohm<br />
R10 33 Ohm<br />
R11 33 Ohm<br />
R12<br />
100 Ohm<br />
Increased<br />
Sensitivity<br />
2<br />
1 3<br />
MUSH BUTTON<br />
P1<br />
WIPER<br />
BOARD<br />
Pad 14<br />
Pad 3<br />
Pad 1<br />
SENSITIVITY POT 500 Ohm<br />
B<br />
WIPER ARM<br />
C<br />
E<br />
1<br />
3<br />
PWR FUSE 20 A<br />
Q2 D1<br />
2N6287 1N5400<br />
2<br />
BRAKE POT 5 Ohm<br />
BRAKE FUSE 5 A<br />
Title<br />
4<br />
1<br />
2<br />
FULL POWER<br />
RELAY<br />
FULL POWER<br />
CONTACT<br />
Closes when wiper<br />
arm is on Pad 14<br />
BRAKE CONTACT<br />
Closes when wiper<br />
arm is on Pad 1<br />
3<br />
WHITE<br />
TRACK POWER<br />
+<br />
BLACK<br />
MOTOR<br />
RED<br />
<strong>JayGee</strong> <strong>Racing</strong> <strong>Slot</strong> <strong>Car</strong> Motor Control Circuit Negative Wired Track<br />
Size Document Number Rev<br />
A A<br />
Date: Saturday, March 13, 2004 Sheet 1 of 1<br />
Let’s look at the how to add the mush button and power relay first, making believe that the track is<br />
still positively wired. The mush button is a momentary contact push-button switch. The trigger<br />
sensitivity pot is shorted out whenever the switch is closed. This minimizes the initial voltage step<br />
and the sensitivity of the trigger. Whenever the full power contact on the trigger closes, the relay<br />
coil is connected in parallel with the motor. The (almost) full track voltage is applied to the coil and<br />
the relay contacts close, bypassing the transistor.<br />
Transistorized controllers are sensitive to track polarity because power transistors can only<br />
conduct current in one direction. In the 2N6284 Darlington power transistor used in the positive<br />
wired controller, current flows from the base and collector into the emitter. The direction of current<br />
flow is denoted by the arrows on the transistor symbol. Since power transistors are inexpensive,<br />
it’s very easy to turn the controller into a negative wired controller by replacing the transistor with<br />
its complement and reversing the diode D1. The 2N6287 Darlington power transistor is<br />
complementary to the 2N6284. It has identical electrical specifications, except that current flows<br />
from the emitter into the base and collector as shown in Figure 6.<br />
In this circuit, once the voltage on the wiper drops below the maximum track voltage, the<br />
transistor begins to conduct. As the wiper voltage drops, the voltage at the transistor’s emitter<br />
terminal follows along, albeit just slightly higher. Since the track is negative wired, motor voltage<br />
increases as the voltage at the transistor’s emitter drops.<br />
1<br />
2
Now let’s take a closer look at how to build the controller itself. Instead of providing detailed stepby-step<br />
instructions on the mechanical aspects, I’ll walk you through the drawings and<br />
photographs, providing tips along the way.<br />
The controller is constructed from a turbo controller frame and trigger assembly, a board<br />
connector for the wiper board, a couple of pots and a PC prototyping board to connect everything<br />
together as shown in Figure 7.<br />
Figure 7. <strong>Controller</strong> Front<br />
I recommend using a board with predrilled pad holes on 0.1” centers but it doesn’t need to have<br />
the plated holes that this one has. Use a board made from FR4 fiberglass, it’s much less brittle<br />
than the proto boards typically found at Radio Shack.<br />
Cut the top off of the turbo controller frame as shown and, using the proto board, create a<br />
mounting plate for the wiper block and pots. Cut it to shape and mount it to the frame using two<br />
screws plus the full power and brake button retaining screws. When drilling the mounting holes,<br />
be sure to keep the lines of pad holes running parallel to the top of the frame – it will help when<br />
you mount the wiper board.<br />
Some things to be aware of:<br />
1. Don’t drill mounting holes for the wiper board yet<br />
2. I wanted the pots to be close together and not stick out to far above the handle. As a<br />
result I needed to trim the unused terminals from the pots. If you don’t feel comfortable<br />
hacking on the pots, leave extra room on the proto board<br />
3. When assembling the proto board to the controller frame, don’t forget to reinstall the<br />
insulating shoulder washers under the brake and full contact buttons. However, leave the<br />
insulating washers off the backside. The proto board will insulate the retaining nuts and<br />
you will need to use one of the insulating washers on the trigger assembly
The wiper board is based on a low-cost circuit board connector that I located in a local electronic<br />
shop that will also sell it by mail order. The contact pads are 0.070” wide, made from gold plated<br />
2 oz copper for durability, and are 0.1” apart on center – ideal for a controller wiper. The best part<br />
is that the traces on the connector are laid out in a pattern that connects the resistors in series,<br />
when the resistors are installed as shown. This photo of the bare wiper board gives a clear<br />
picture of where to attach the RED and WHITE wires and the resistors. Cut off the top contacts<br />
and solder resistors R1 through R11 to the board at this time, leaving off R12 and the RED and<br />
WHITE wires.<br />
Figure 8. Wiper Board<br />
Connect to<br />
RED<br />
R12<br />
R11<br />
R1<br />
PAD1 PAD14<br />
Connect to<br />
WHITE<br />
After installing resistors R1 through R11, you will notice that their leads protrude slightly from<br />
underneath the wiper board. These protrusions will drop into the proto board through-holes,<br />
helping to keep the wiper board aligned when drilling the mounting holes.<br />
Figure 9. Early Prototyp<br />
To RED<br />
PAD1<br />
Not<br />
Needed<br />
R12<br />
To Brake To Brake<br />
Sensitivity Pot Contact Fuse<br />
Brake Pot<br />
To WHITE
The photograph in Figure 9 is of an early prototype that had only 10 resistors in the voltage<br />
divider, installed using a pair of single in-line prototyping (SIP) sockets. The current limiting<br />
resistor shown in the lower left-hand corner was connected between the wiper and the transistor<br />
base. It was eliminated from the final design. The black wire on the wiper button loops around to<br />
the current limiting resistor and is not the track BLACK wire.<br />
You can also see that the pads are so close together that the wiper button spans almost 3 pads.<br />
As long as the wiper button is touching PAD1, it’s pulled down to 0V. As soon as it moves off<br />
PAD1, it rises to the voltage level of the highest pad it’s touching, even though it spans multiple<br />
pads. Since the wiper button touches PAD3 by the time that the connection to PAD1 is broken,<br />
PAD2 is doing nothing but adding mechanical support to the wiper button – so it can be left<br />
disconnected.<br />
In a Parma Turbo <strong>Controller</strong>, the wiper arm is in the high current motor path. In this controller, it’s<br />
connected to the transistor’s base terminal, isolated from the motor. However, the trigger’s<br />
common contact is connected to the motor through the track’s black wire. This means that the<br />
wiper arm must be insulated from the trigger’s common contact.<br />
Assemble the trigger as shown in Figure 10, with the wiper arm on the bottom of the trigger. You<br />
will need to trim some material off of the bottom of the wiper arm to get it to fit. Trim just enough<br />
so that the hole in the wiper arm is perfectly centered over the hole in the trigger, then glue the<br />
wiper arm to the trigger using superglue. Since the wiper arm mounting hole quite is a bit larger<br />
than the hole bored in the trigger for the retaining screw, the screw will not make contact with the<br />
wiper arm. You can use one of the Turbo <strong>Controller</strong>’s #2 plastic washers (drilled out for the 4-40<br />
retaining screw) to insulate the retaining nut.<br />
Figure 10. Trigger Assembly<br />
Standard Parma Turbo Trigger<br />
Connect to transistor’s<br />
Base terminal<br />
Electrically Connected Electrically Isolated<br />
Connect to track’s<br />
BLACK wire<br />
Plastic Washer<br />
Oversize<br />
Hole in<br />
Wiper Arm<br />
Connect to track’s<br />
BLACK wire<br />
<strong>JayGee</strong> <strong>Racing</strong> <strong>Controller</strong> Trigger<br />
Install the trigger assembly. Slip the wiper board between the trigger and proto board as shown in<br />
Figure 9. Position the wiper board so that the wiper button sweeps across PAD1 through PAD14,<br />
while clearing the resistors. It will just barely contact PAD14 before closing the full power contact.<br />
The wiper button should contact PAD1 before the brake contact closes, otherwise the transistor<br />
will not be shut off when the brake is engaged (instant blown fuse!). Drill the wiper board<br />
mounting holes and install the rest of the components. During final assembly you can minimize<br />
the size of the dead band by adjusting the brake arm of the trigger’s common contact.
The wiper board is connected to the controller’s WHITE and RED leads by jumper wires as<br />
shown in Figure 11. PAD14 is connected to WHITE at the full power contact. The short red<br />
jumper connects PAD1 directly to RED at pin 2 of the trigger sensitivity pot. These jumpers are<br />
easily installed after the wiper board is mounted to the prototyping board. Once installed, you will<br />
unable to remove the wiper board.<br />
One side of the brake pot is connected to the brake contact. The other side is connected to the<br />
brake fuse. The brake fuse is then connected to the controller’s RED lead in a harness at the<br />
base of the controller handle.<br />
Figure 11. <strong>Controller</strong> Back<br />
To PAD14<br />
Full Power<br />
Contact<br />
To WHITE<br />
To Brake Fuse<br />
To RED<br />
To PAD1<br />
To Q1<br />
Base<br />
Brake<br />
Contact<br />
The right-most wire in this photo connects the transistor’s base terminal to the wiper button<br />
through the current limiting resistor on the front side of the board. In the final version of this<br />
design, this wire would be connected directly to the wiper button.<br />
The wiring harness was constructed from 12 gage speaker cable for the high current track power<br />
(white) and motor (black) connections. TQ brand leadwire was chosen for use in the controller<br />
handle, the transistor base connection and brake wire due to its abrasion resistant insulation. Its<br />
tough silicon insulation resisted tearing better than some other brands of leadwire when the<br />
harness’s wire ties are cinched tight.<br />
I wanted the power mode to be electrically neutral should it brush up against any one of the track<br />
leads. The heatsink is electrically isolated from the transistor by an insulated transistor mounting<br />
kit and the transistor’s terminals are protected by a small PC proto board mounted on standoffs.<br />
Figure 12. Power Module
Afterword<br />
The rest of the manuscript is gone forever, the bits and bytes scattered in a hard drive graveyard<br />
somewhere in Silicon Valley. However, there’s more than enough info here to enable you to build<br />
your own linear response controller.<br />
For those of you wishing to purchase a linear response controller instead of building your own,<br />
<strong>JayGee</strong> <strong>Racing</strong> offers the Linear 100, a 24-band controller built using the same principles as the<br />
prototype. It uses the same basic circuit as I published in here. I'm a strong believer in the voltage<br />
follower approach and making the voltage drop between each band equal. It's what gives the<br />
"feel" everyone that has used the controller has commented on.<br />
What improvements did I incorporate into the production controller? I obviously doubled the<br />
number of bands to 24 and adjusted the resistor and potentiometer values accordingly. That<br />
gives it the smoothness...smaller incremental speed differences as the trigger is pulled back.<br />
Since I fabbed my own PCB, I was able to make the deadband a true deadband...left floating<br />
instead of pulled to ground. So now the car begins to move as soon as the leading edge of the<br />
wiper button touches the first band as opposed to the trailing edge of the button leaving the<br />
deadband.<br />
A notable improvement was the sensitivity range extender switch. It's already proven it's worth as<br />
per the feedback you're reading here.<br />
USRA national champions Mike Swiss and Roger Schmitt prefer to use the controller in the<br />
normal setting and saw no purpose in making the throttle hair trigger sensitive. Midwest wing car<br />
driver Tony Hobart comes along and pretty soon flips the switch up to crank up the sensitivity as<br />
far as it will go. That's why I put it there. Everyone has there own driving style and the extended<br />
range switch simply makes the controller more adaptable.<br />
As for me, I'll flip it up when driving the center lanes on tracks like a Blue King...it was good for<br />
another 0.1 sec since I was able to get up the lead on faster with my scale flexi car. It makes up<br />
for my slow finger as I can't move it fast enough to go to full punch after I exit the donut but still<br />
brake for the lead on.<br />
I added features for wing car racers, a mush button and mounting points for choke controls, and I<br />
incorporated a blast relay contact into the PCB itself.<br />
Of course, the mechanicals are very different...true production quality vs the hacked together<br />
prototype used to test and debug the original circuit. I even went the extra distance to add ball<br />
bearings as standard. That allowed me to go light on the wiper button pressure and use a light<br />
spring action, which everyone seemed to like.<br />
So build it, buy it or use this information as a springboard for your own controller ideas.<br />
Regards,<br />
Jeff Goldberg<br />
<strong>JayGee</strong> <strong>Racing</strong><br />
www.jaygeeracing.com