Vision-based ACC with a Single Camera: Bounds on ... - Mobileye
Vision-based ACC with a Single Camera: Bounds on ... - Mobileye
Vision-based ACC with a Single Camera: Bounds on ... - Mobileye

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
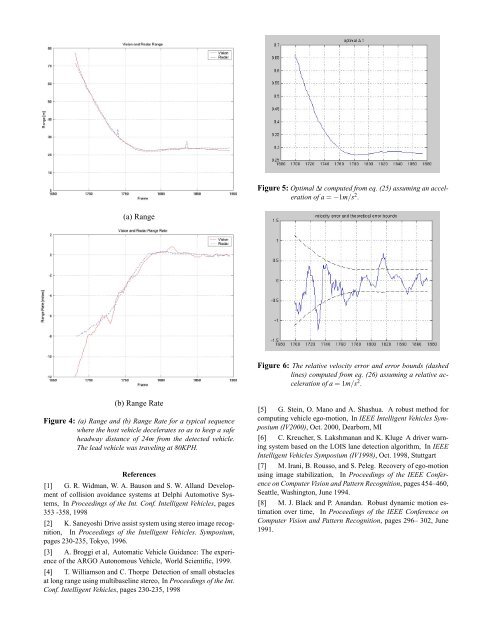
Figure 5: Optimal ∆t computed from eq. (25) assuming an accelerati<strong>on</strong>of a = −1m/s 2 .(a) RangeFigure 6: The relative velocity error and error bounds (dashedlines) computed from eq. (26) assuming a relative accelerati<strong>on</strong>of a = 1m/s 2 .(b) Range RateFigure 4: (a) Range and (b) Range Rate for a typical sequencewhere the host vehicle decelerates so as to keep a safeheadway distance of 24m from the detected vehicle.The lead vehicle was traveling at 80KPH.References[1] G. R. Widman, W. A. Baus<strong>on</strong> and S. W. Alland Developmentof collisi<strong>on</strong> avoidance systems at Delphi Automotive Systems,In Proceedings of the Int. C<strong>on</strong>f. Intelligent Vehicles, pages353 -358, 1998[2] K. Saneyoshi Drive assist system using stereo image recogniti<strong>on</strong>,In Proceedings of the Intelligent Vehicles. Symposium,pages 230-235, Tokyo, 1996.[3] A. Broggi et al, Automatic Vehicle Guidance: The experienceof the ARGO Aut<strong>on</strong>omous Vehicle, World Scientific, 1999.[4] T. Williams<strong>on</strong> and C. Thorpe Detecti<strong>on</strong> of small obstaclesat l<strong>on</strong>g range using multibaseline stereo, In Proceedings of the Int.C<strong>on</strong>f. Intelligent Vehicles, pages 230-235, 1998[5] G. Stein, O. Mano and A. Shashua. A robust method forcomputing vehicle ego-moti<strong>on</strong>, In IEEE Intelligent Vehicles Symposium(IV2000), Oct. 2000, Dearborn, MI[6] C. Kreucher, S. Lakshmanan and K. Kluge A driver warningsystem <str<strong>on</strong>g>based</str<strong>on</strong>g> <strong>on</strong> the LOIS lane detecti<strong>on</strong> algorithm, In IEEEIntelligent Vehicles Symposium (IV1998), Oct. 1998, Stuttgart[7] M. Irani, B. Rousso, and S. Peleg. Recovery of ego-moti<strong>on</strong>using image stabilizati<strong>on</strong>, In Proceedings of the IEEE C<strong>on</strong>ference<strong>on</strong> Computer <str<strong>on</strong>g>Visi<strong>on</strong></str<strong>on</strong>g> and Pattern Recogniti<strong>on</strong>, pages 454–460,Seattle, Washingt<strong>on</strong>, June 1994.[8] M. J. Black and P. Anandan. Robust dynamic moti<strong>on</strong> estimati<strong>on</strong>over time, In Proceedings of the IEEE C<strong>on</strong>ference <strong>on</strong>Computer <str<strong>on</strong>g>Visi<strong>on</strong></str<strong>on</strong>g> and Pattern Recogniti<strong>on</strong>, pages 296– 302, June1991.