Aviation Electronics Technician 1 - Historic Naval Ships Association
Aviation Electronics Technician 1 - Historic Naval Ships Association
Aviation Electronics Technician 1 - Historic Naval Ships Association

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
PASS/FAIL ASSIGNMENT PROCEDURESIf your overall course score is 3.2 or higher, youwill pass the course and will not be required toresubmit assignments. Once your assignmentshave been graded you will receive coursecompletion confirmation.If you receive less than a 3.2 on any assignmentand your overall course score is below 3.2, youwill be given the opportunity to resubmit failedassignments. You may resubmit failedassignments only once. Internet students willreceive notification when they have failed anassignment--they may then resubmit failedassignments on the web site. Internet studentsmay view and print results for failedassignments from the web site. Students whosubmit by mail will receive a failing result letterand a new answer sheet for resubmission of eachfailed assignment.COMPLETION CONFIRMATIONAfter successfully completing this course, youwill receive a letter of completion.ERRATAErrata are used to correct minor errors or deleteobsolete information in a course. Errata mayalso be used to provide instructions to thestudent. If a course has an errata, it will beincluded as the first page(s) after the front cover.Errata for all courses can be accessed andviewed/downloaded at:http://www.advancement.cnet.navy.milSTUDENT FEEDBACK QUESTIONSWe value your suggestions, questions, andcriticisms on our courses. If you would like tocommunicate with us regarding this course, weencourage you, if possible, to use e-mail. If youwrite or fax, please use a copy of the StudentComment form that follows this page.For subject matter questions:E-mail: n315.products@cnet.navy.milPhone: Comm: (850) 452-1001, Ext. 1713DSN: 922-1001, Ext. 1713FAX: (850) 452-1370(Do not fax answer sheets.)Address: COMMANDING OFFICERNETPDTC (CODE N315)6490 SAUFLEY FIELD ROADPENSACOLA FL 32509-5237For enrollment, shipping, grading, orcompletion letter questions:E-mail: fleetservices@cnet.navy.milPhone: Toll Free: 877-264-8583Comm: (850) 452-1511/1181/1859DSN: 922-1511/1181/1859FAX: (850) 452-1370(Do not fax answer sheets.)Address: COMMANDING OFFICERNETPDTC (CODE N331)6490 SAUFLEY FIELD ROADPENSACOLA FL 32559-5000NAVAL RESERVE RETIREMENT CREDITIf you are a member of the <strong>Naval</strong> Reserve, youwill receive retirement points if you areauthorized to receive them under currentdirectives governing retirement of <strong>Naval</strong>Reserve personnel. For <strong>Naval</strong> Reserveretirement, this course is evaluated at 15 points.Points will be credited in units upon satisfactorycompletion of the assignments as follows:12 points upon satisfactory completion ofassignments 1 through 8.3 points upon satisfactory completion ofassignments 9 and 10.(Refer to Administrative Procedures for <strong>Naval</strong>Reservists on Inactive Duty, BUPERSINST1001.39, for more information about retirementpoints.)v
COURSE OBJECTIVESIn completion this nonresident trainingcourse, you will demonstrate a knowledge ofthe subject matter by correctly answeringquestions on the following: communications,navigation, radar, antisubmarinewarfare, indicators, infrared, weaponssystems, computers, automatic carrierlanding system, and the electrostaticdischarge program.vi
Student CommentsCourse Title:<strong>Aviation</strong> <strong>Electronics</strong> <strong>Technician</strong> 1 (Organizational)NAVEDTRA: 14030 Date:We need some information about you:Rate/Rank and Name: SSN: Command/UnitStreet Address: City: State/FPO: ZipYour comments, suggestions, etc.:Privacy Act Statement: Under authority of Title 5, USC 301, information regarding your military status isrequested in processing your comments and in preparing a reply. This information will not be divulged withoutwritten authorization to anyone other than those within DOD for official use in determining performance.NETPDTC 1550/41 (Rev 4-00)vii
CHAPTER 1COMMUNICATIONSAs an <strong>Aviation</strong> <strong>Electronics</strong> <strong>Technician</strong>, you will betasked to operate and maintain many different types ofairborne communications equipment. These systemsmay differ in some respects, but they are similar in manyways. As an example, there are various models of AMradios, yet they all serve the same function and operateon the same basic principles. It is beyond the scope ofthis manual to discuss each and every model ofcommunication equipment used on naval aircraft;therefore, only representative systems will be discussed.Every effort has been made to use not only systems thatare common to many of the different platforms, but alsohave not been used in the other training manuals. It isthe intent of this manual to have systems from each andevery type of aircraft in use today.RADIO COMMUNICATIONSLearning Objective: Recognize the varioustypes of radio communications. Identify thevarious frequency bands and their uses andlimitations.In basic terms, communication is defined as themeaningful transfer of information from one location(the sender, source, originator) to another location (thedestination or receiver). Electronic communication useselectrical energy to transmit the information to becommunicated Since this electrical energy travels at thespeed of light, the transfer can occur within a fraction ofa second. The information must be converted from itsoriginal form of sound, light, or mechanical energy intoelectrical energy. This electrical energy can then betransmitted via wires or radiated through space to areceiver. The receiver must then convert the electricalenergy back into its original form to complete thecommunication cycle.TYPES OF RADIO COMMUNICATIONSRadio communications has become a highlysophisticated field of electronics. All Navy aircraft havethe capability to use the commonly used ship-to-ship,ship-to-air, air-to-air, air-to-ground, and ship-to-shorecommunication circuits. These operations are accomplishedthrough the use of compatible and flexiblecommunication systems.Radio is the most important means of communicatingin the Navy today. There are many methodsof transmitting in use throughout the world. This manualwill discuss three types. They are radiotelegraph,radiotelephone, and teletypewriter.RadiotelegraphRadiotelegraph is commonly called CW (continuouswave) telegraphy. Telegraphy is accomplishedby opening and closing a switch to separate acontinuously transmitted wave. The resulting “dots” and“dashes” are based on the Morse code. The majordisadvantage of this type of communication is therelatively slow speed and the need for experiencedoperators at both ends.RadiotelephoneRadiotelephone is one of the most useful militarycommunication methods. It is used by aircraft, ships,and shore stations because of its directness, convenience,and ease of use. The equipment used fortactical purposes usually operate on frequencies that arehigh enough to have line-of-sight characteristics. Thiscuts down not only on the possibility of the enemyintercepting the messages, but also cuts down on thedistance between the transmitter and receiver.TeletypewriterTeletypewriter (TTY) signals may be transmitted byeither landlines (wire), cable, or radio. The Navy usesradio teletypewriter (RTTY) for high-speed automaticcommunications. The keyboard used with a TTY systemis similar to that of a typewriter. When the operatorstrikes a key, a sequence of signals is transmitted. At thereceiving station, the signals are translated back intoletters, figures, and symbols that are typed onto paperfor use.1-1
Table 1-1.-Radio-Frequency SpectrumNAVY FREQUENCY BAND USETable 1-1 shows the radio-frequency spectrumbroken down into bands that are used by the military.Each band of frequencies has its own characteristics.Navy Electricity and <strong>Electronics</strong> Training Series,Module 17, Radio-Frequency Communications Principles,discusses all the bands. This chapter will only discussthe bands that are of interest to the <strong>Aviation</strong> Electronic<strong>Technician</strong>.VLF and LF Band CommunicationsThe very low frequency (VLF) and low frequency(LF) bands were originally used for radio telegraphy.Because the wavelengths were in the kilometer rangeand higher (30 kHz has a wavelength of 10 kilometers,or about 6.2 miles), enormous antennas had to beenused. With today’s technology, this is no longer a factor.MF and HF Band CommunicationsThe medium-frequency (MF) and high-frequency(HF) bands are not only used by the Navy, but portionsare also used by commercial AM broadcasting stations.These spectrums also include the international distressfrequencies (500 kHz, 2182 kHz, 8364 kHz, 3023.5 kHzand 5680 kHz).Signal radiation in these frequency ranges have theimportant property of being reflected by the ionosphere.The ionosphere is a layer of electrically chargedparticles at the top of the earth’s atmosphere. The layeris caused by the strong solar radiation entering the upperatmosphere. When a radio wave in the MF or HF rangehits this layer, it is reflected back to earth. Multiplereflections between this layer and earth are are possible,allowing great distances to be obtained in these ranges,particularly the high-frequency band.The disadvantage of this type of propagation is thatit depends on the characteristics of the ionosphere,which varies widely, especially during daylight hours.As a result of this varying, the waves are reflecteddifferently and take different paths over a period of time.This causes the signal at the receiver to vary in strength,which causes the output to fade in and out.VHF and UHF Band CommunicationsSignal radiation in these frequency ranges get verylittle ionospheric reflection. As a result, communicationsin these ranges tend to be line-of-sight and overa short distance. Line-of-sight means exactly what thename says–the transmitter and receiver must be withina straight visual sighting line from each other. Buildingsand uneven terrain may affect the transmission. Thelower part of the UHF band and the VHF band is alsoused for mobile communications and television.1-2
INTERCOMMUNICATION SYSTEM(ICS)Learning Objective: Recognize componentsand operating features of an intercommunicationsystem used in naval aircraft.The intercommunication system that will bediscussed in this section is the OK-248( )(V)/AI,Intercommunication-Communication Control Group(ICCG). This system is found on the S-3 aircraft.The OK-248( )(V)/AI provides intercommunicationsfor crew members and maintenance personnel.It also controls operation and signal interfacing for allradio sets, and controls operation and signal interfacingfor aural monitoring of the navigation aids.MAJOR COMPONENTSThe following is a discussion on the various componentsin the OK-248( )/AI system.C-8760/AI Intercommunication-Communication Control PanelThe C-8760/AI (fig. 1-1) is commonly called theintegrated radio control (IRC). The IRC panel performsthe following functions:Controls HF radio modes and functionsControls UHF radio modes and functionsDisplays In-Flight Performance Monitor (IFPM)status of communication subsystems andcomponentsInitiates on-line operating configuration ofcommunication systemsThere are eight switches for the HF system functionselections, along with a squelch knob. These switchesare used to select the various modes of operation for theHF system on board. The squelch knob is turnedclockwise to increase squelch and counterclockwise todecrease squelch.The next section of switches (labeled UHF) on theIRC panel are used to control the UHF radios. There aretwelve of these switches but only eleven are used. Theswitch labeled SPARE is not used.The next section consists of a numerical keyboard,five switches, and three sets of indicators. The keyboardis where the operator inputs the desired channel andfrequencies for the HF and UHF radios. The CLR buttonFigure 1-1.-C-8760/AI intercommunication-communicationcontrol panel.is used to clear an error and start over with the selection.The G button is used to select a guard channel. The threeindicator groups display the following:HF FREQ—displays the selected frequency forthe HF radio setCHAN UHF 1 FREQ—displays the selectedchannel and frequency for the UHF 1 radio setCHAN UHF 2 FREQ—displays the selectedchannel and frequency for the UHF 2 radio setThe five switches are used to select what type ofinformation the operator is inputting via the keyboard.After the operator inputs the channel or frequency, theENTER switch must be pressed.The last section of the panel contains seven faultindicator lights. These indicators are labeled UHF1,UHF2, PRESS, HF, CPLR, DTS, and SLU. Each one isthe fault indicator for the system or component forwhich it is labeled. It will illuminate when a fault occursin its corresponding system or component.Located directly under the HF squelch knob is aBITE indicator. This indicator will illuminate when afault is detected in the IRC.1-3
Figure 1-3.-LS-602/AI control panel.the pilot and copilot’s stations. The pilot will connectdirectly to the UHF-1 radio, and the copilot will connectdirectly to the HF system.LS-602/AI Control PanelFigure 1-2.-LS-601/AI crew control panel.LS-601/AI Crew Intercommunication System(ICS) PanelEach of the crew members has a LS-601/AI ICSpanel (fig. 1-2). These ICS panels enable the crewmembers to do the following:l Select six ICS modesl Select three radios to monitorl Select navigation aids and IFF to monitorl Select either hot microphone or push-to-talkkeyline operationl Control the volume for ICS, radios, navigationalaids, and the IFF aural functionsControl signals from the crew’s ICS control panelsconsist of multiplexed binary words in the Manchesterformat and hard wired ground and analog voltages.The crew’s control panel has 14 switchlights that areself-explanatory. The two volume knobs aredual-purpose knobs. Each one controls two volumes,depending whether you turn the inner or outer knob. TheBITE indicator will illuminate when a fault is detectedin the control panel.Each panel is identical, and they can be swappedbetween stations. There are differences in operation,depending on the station. The SENSO station cannottransmit so the XMIT SEL switchlight is disabled at thatstation. The ALT ICS switchlight will place the pilot andcopilot’s headsets and microphones in parallel. TheSENSO and TACCOs will similarly be tied together asa pair. The NORM BK UP switchlight only operates atThere are three LS-602/AI panels (fig. 1-3) locatedin the aircraft. These panels are for maintenance/groundhandling functions. They provide the communicationbetween the outside of the aircraft and the crew stations.The only control located on this panel is a volume knob,which adjusts the volume in the headset for eachindividual panel.CV-3048( )/AI Converter-Interconnecting BoxThe CV-3048( )/AI is the switching logic unit (SLU)for the intercommunication system. The SLU is thesignal interface unit for the communication system. Itsfunctions are as follows:Voice signal conditioningReceive/transmit mode controlAntenna configuration controlSignal switching between componentsBinary control signal coding and decodingComponent mode forcingFUNCTIONAL DESCRIPTIONThis intercommunication system uses variouscomputer-formatted signals in its operation. As a seniortechnician, you will be required to understand thevarious types of languages used by this system.Intercommunication-Communication ControlGroup (ICCG) Signal InterfaceThe ICCG signal interface consists of a discretehardwired signal interface and a multiplexed binaryword signal interface. Each will be discussed in thefollowing text.1-4
BINARY-CODED WORD INTERFACE.— Thecontrol signals in the ICCG interface are primarily in abinary-coded word format. The binary words are shiftedinto and out of the crew ICS panels, the IRC panel, andthe SLU on pairs of multiplex lines. The crew ICS panelsand the IRC have unique binary word addresses that areidentified by a roll call sequence performed in the SLU.Every 25 milliseconds, each crew panel and the IRC areinterrogated for a change-of-status by the SLU. Thischange-of-status data is stored in the SLU until it istransferred to the general-purpose digital computer(GPDC) for permanent storage. The GPDC will bediscussed in a later chapter of this TRAMAN. Thechange-of-status data is then processed by the SLU toproduce mode forcing signals that are sent to theappropriate peripheral and ICCG components.HARD-WIRE SIGNAL INTERFACE.— Thevolume control signals and backup mode control andstatus signals are interfaced by separate lines betweenthe components. These signals are analog voltages andground circuits. These signals produce changes in thecomponents as the controls are adjusted or pressedwithout being processed first.ICCG IndicatorsMost of the indicators in the ICCG are either modeor function status indicators that come on amber andgreen. When the indicator comes on green, it means thatthe corresponding function is available for selection.When that function is selected, the indicator will turn toamber. With the indicator off, that function is notavailable for selection.On the IRC, the IFPM indicators will illuminatewhen a fault is detected in the correspondingcomponent. The S indicators on the crew panels willilluminate red when the secure mode of operation isselected for that particular radio system. The indicatorsin the frequency selection section of the IRC come onred when frequency selection is available.Encoded and Decoded Word FormatAll the components in the ICCG, except for the threeLS-602/AI panels, have identical binary encoding anddecoding circuits. The encoding circuits transform asignal function into a binary word in the Manchesterformat for transmission to another component. Thedecoding circuits transform the Manchester signalfunctions from another component into basic signalfunctions for application to processing and controlcircuits within that component.Each of the components in the ICCG, except theLS-602/AI, have a unique binary word address. Thecomponent responds to an interrogation by the SLU onlywhen its specific address is recognized. The addressesare incorporated into the 36-bit ICCG word format.Each bit is a status or control function, or a part of the5-bit component address that has a permanentlyassigned slot in the 36-bit format.The 36-bit words are serially generated and seriallytransmitted binary bit words. Each bit is either a 1 or a0. A logic 1 corresponds to a voltage level between 5.0and 8.5 volts dc. A logic 0 corresponds to a voltage levelbetween -0.5 and –1.5 volts dc.ENCODED WORD FORMAT.— Encoded wordformat is setup for 36-bits that are either status/controlfunction information or component addresses. Bit 1 isthe control bit and is always a 1.Bits 2 through 6 are the address bits. Each componenthas its own unique binary configuration. Oneexample of this is that the SLU recognizes the binarynumber 01010 as the pilot crew ICS panel. Should thisconfiguration show up in bits 2 through 6, then the SLUwill process on the command data from the pilot ICSpanel during the 36-bit word cycle. Each componentaddress word is designated by the decimal equivalent toits binary value. With the above example, the pilot ICSpanel address 01010 is equal to decimal 10. Therefore,the pilot ICS panel designation is word 10.Bit 7 is the tag bit needed for binary word housekeeping.It is always 0 for encoded words.Bit 8 is the enter bit for binary housekeeping. In theencoded words it is always 1.Bits 9 through 34 are the command functions, status,or spare bits. Bit 35 is a command function, status, spare,or set-zero housekeeping bit.Bit 36 is the parity bit used for self-check in thebinary circuitry. This system uses the odd parity check.If there are an even number of 1’s in the first 35 bits, bit36 will be a 1. If the total number of 1’s in the first 35bits is odd, bit 36 will be a 0. When a component receivesthe 36-bit encoded word, its decoder checks the parityby counting the 1’s. If it comes up with an even numberof 1’s, the word is not processed and a BITE indicatoris illuminated on the component that transmitted thefaulty data word.DECODED WORD FORMAT.— The decodedword format is similar to the encoded word format withjust a few differences. Bit 1, bits 9 through 34, bit 35 andbit 36 are the same as in the encoded word. Bits 21-5
Figure 1-4.-Manchester encoding.through 6 are the decoded address bit, but it is not the a master clock pulse train. The clock pulse rate is 120same configuration as the encoded word. Bit 7 is the tagbit and is always 1 in the decoded word. Bit 8 is the enterbit and is always 0 for the decoded words.The ICCG components process binary commandand status words that cause changes in operation anddisplay configuration. Word exchanges betweencomponents are done by binary word data encoded inManchester format.Manchester Word EncodingThe Manchester word format is a modification ofthe 36-bit encoded word generated in the components.This is done for transmission of the information fromone component to another. The modification isaccomplished by combining the basic 36-bit word withkHz, and the pulse width is 8.3 microseconds.Figure 1-4 shows a Manchester encoder equivalentcircuit and its input and output signals. When both inputsto the first AND gate are 1, the Manchester word bit isalso 1 for the 4.15-microsecond duration of the positiveclock pulse. The resulting Manchester pulse occursduring the first half of the bit period. The output pulseof the first AND gate is applied to both the inverter inputand the Manchester word output. The inverter producesa 0 output to keep the output of the second AND gate at0, while a Manchester pulse is being produced. Sincethe clock pulse is negative during the second half of thebit period, the output of the second AND gate remainsat 0.When the basic binary word bit at the first AND gateis 0 and the clock pulse is 1, the output of the first ANDgate is 0. This causes the output of the inverter to be 1.1-6
Figure 1-5.-Manchester decoding.Because this makes both inputs to the second AND gateto be 1’s, the output of the second AND gate will be 1.This 1 will cause the integrator to charge, producing aManchester word bit of 1 during the second half of theclock pulse. This type of bit is generated for timingpurposes only.Manchester Word DecodingWhen component receives a Manchester word, thedigital control circuits must decode the word into thebasic binary word and the clock pulse train. This processis required prior to any further processing of the signalby the component. A Manchester decoder equivalentcircuit and its input and output signals are shown infigure 1-5.The first input bit of the Manchester is always a 1.This produces a 0 at the output of the inverter and theinputs of the two timers. The same Manchester input bitis applied to one input of the NAND gate. The 0 outputof the 8.3 timer is applied to the other input of the NANDgate, giving an output of 1 from the NAND gate. This 1is applied to the OR gate, making its output a 1. The 1from the OR gate represents the first derived clock pulsebit. This 1 is also applied to one of the inputs of the ANDgate. The other input is the original 1 from theManchester word. With both inputs to the AND gatebeing 1, the output will be a 1. This 1 represents the firstbit of the derived basic data bit.When the Manchester bit goes to 0, the inverteroutput goes to 1 and starts the two timers. If the nextManchester bit is 1, the two timers are restarted before1-7
they can complete a full cycle. The decoding process isrepeated, causing another derived clock pulse bit andanother derive basic binary word bit to be generated.When a Manchester bit is a binary 0, it cannot resetthe timers through the inverter. The 4.15-microsecondtimer times out and produces a binary 1 at one input ofthe OR gate. The OR gate output is a binary 1 thatrepresents the next derived clock pulse. Since there is abinary 1 at one input and a binary 0 at the other input ofthe AND gate, the resulting output is a binary 0 thatrepresents the next derived data bit. The 8.3-microsecondtimer is still running because a binary 1 has notbeen produced in the Manchester word. The 8.3-microsecondtimer times out and produces a 1 on one input ofthe NAND gate. The other input is a 0, which producesa 1 at the output. This 1 produces a 1 at the output of theOR gate, which represents a 1 for the derived clockpulse.Multiplex TransmissionMultiplex transmission data consists of 32 roll callwords with a period of 800 microseconds for each word.The total period of time required for all the words is 25.6milliseconds. Therefore, any one of the specific roll callperiods occurs every 25.6 milliseconds. A roll call wordconsists of an inhale word and an exhale word, eachbeing 400 microseconds long. Each inhale and exhaleword consists of 48 clock intervals of 8.3 microsecondseach. These clock intervals correspond to data bits. Ofthe 48 bits, 6 bits precede the 36-bit Manchester wordand 6 bits follow the word. This means that there are 12bits between the inhale word and the exhale word, whichtotals 79.6 microseconds. This period of time allows thecomponent to prepare itself to receive or transmit data.The SLU controls the ICCG. The roll call for thecommunication systems is generated there. Between theSLU and the other components of the ICCG, the exhaleword is a status word Between the GPDC and the SLU,the exhale word is also a status word. The inhale wordbetween the SLU and the other components of the ICCGis a command word that tells the SLU to changeconfiguration or frequency.The status is the configuration that the communicationsystems are in at any specific instant, and isindicated by the color of the switchlight (amber, green,red, or dark). A configuration change occurs whenevera switchlight is depressed. For example, changing HFUSB to HF LSB is a configuration change.Each component in the ICCG has a digital controlsection that controls all data entering or leaving thecomponent. The IRC andcomponents that respond tothe SLU are the onlymore than one roll calladdress. In contrast, the crew ICS panel only has torespond to one roll call address. Because of this, thecrew ICS panels use comparators instead of inputregister decoders. The address logic is hardwired intothe aircraft cable connectors for each crew ICS panel.This allows only one address to compare true at eachstation, which makes the crew ICS panels interchangeable.Roll CallThe ICCG logic flow and roll call sequence aredescribed in the following text.ROLL CALL 0.– Roll call 0 is a spare on both theinhale and exhale words. When the 800 microsecondshave elapsed, the roll call generator produces roll call 1.ROLL CALL 1.– The first part of roll call 1 isexhaled from the SLU. Roll call 1 informs the GPDCthat a change in configuration or status has occurredsince the last roll call 1. The GPDC buffer and/ormultiplex lines (port 2) receives the exhale word fromthe SLU. There are three components of the ICCGhooked up to port 2. The IRC is the only ICCG componentthat recognizes roll call 1, and it processes theroll call through the digital control section, line receiver,and inhale word register. In the inhale word register, theManchester word is decoded into the clock pulses andthe data word. The roll call is matched against theaddress, and the decision is made whether or not toproceed with the processing. The other two componentsare processing the roll call 1 at the same time, butbecause the address will not match, only the IRC willcontinue processing.In the IRC, the derived data is sent to the inputregister under the control of the derived clock pulses.Word validation begins at this time. As part of the wordvalidation process, the tag bit is examined. The tag bitof roll call 1 is a binary 1 that identifies the word as astatus word from the SLU. A tag bit identification wordin the IRC is sent to the inhale/exhale word gate. At thesame time, the roll call 1 is sent to the exhale word inhibitgate that starts a 500-microsecond timer. When the timertimes out, the exhale AND gate is enabled and the dataword is shifted into the exhale word assembly register.The second part of roll call 1 is generated in the IRC.The data originates in the exhale word generator, and itrepresents the HF configuration. The configuration ofthe data bits in the exhale word register is shown in table1-2. Data bits 15 and 16 are USB and LSB. When theUSB/LSB switchlight is depressed to change from USBto LSB, a pulse is generated that sets the bit 16 one-shotcircuit. As long as the switchlight is depressed, the1-8
Table 1-2.-Exhale Word Register Configuration1-9
one-shot circuit output is directly applied to the lampdrivers. The lamp drivers cause the LSB lamp to comeon amber and the USB lamp to come on green. Once theswitchlight is released, an enter pulse is inserted into theword storage of the exhale word generator. If the IRC isin the manual mode, this enter pulse will cause theparallel transfer of the data bits from the one-shotcircuits to the word storage register. When theswitchlight is released, parallel data from the one-shotdata is inhibited from the lamp drivers. The indicatorschange to the color configuration represented in thestatus configuration memory. The lamps go offmomentarily because of the 25-millisecond cycle timeof the roll call sequence required for updating the statusregisters. The parallel data goes from the word storageregister to the parallel-to-serial word converter, andthen, under control of the clock and roll call control, tothe exhale word inhibit AND gate. From here it istransferred to the exhale word assembly register, wherethe roll call address and tag bit are added. A parity bit isalso added if the first 35 bits are even. The clock pulseand data are combined and then shifted out on themultiplex line.The second part of the roll call 1 data is now inManchester format and is applied to the othercomponents on port 2. Only the SLU recognizes roll call1 in its digital control section. Roll call 1 is an exhaleword with respect to the IRC, but it is an inhale word inrespect to the SLU.The inhale word enters the SLU through the linereceiver and is transferred to the inhale word register.Here the data and the clock pulses are separated, and thedata is shifted to the input register under the control ofthe derived clock pulses. This is the only function of thederived clock pulses. Once the data is shifted to the inputregister, the master clock is used to shift the data fromone buffer to another.The roll call word is shifted into the valid wordregister. This register validates the word by ensuring thatthere are 36 bits, the address is 5 bits long, the addresshas a control list and a tag bit, and the word parity is odd.If any of these conditions are not met, the word is sentto the not-valid register. If the input word is invalid threetimes, the status register sets the BITE indicator on thecomponent that sent the word. If the word is valid, avalid word signal is generated, and the enter bit of thederived data is examined. If the enter bit is not a binaryone, no further processing is done. The SLU onlyprocesses data if a change is present on the inhale word.If a change is present, the enter bit is a binary one.If the inhale word is valid and it has an enter bit, itis sent to the HF configuration buffer. Here it is loadedinto the multiplex register by the clock pulses andunique strobe G24. The multiplex input register shiftsthe data to the word decoder, where it is converted fromserial binary format to parallel binary format. Thisparallel data is used to make the configuration change.The data is also converted back to serial binary formatand stored for use in the exhale word assembly registerfor the next roll call 1.ROLL CALL 2.– After the second part of roll call1 is processed by the SLU, the first part of roll call 2 isprocessed. Roll call 2 originates during word storage inthe HF conjuration buffer of the SLU. The exhaleword is sent from the SLU on the common multiplexline. Each component on the common multiplex linecompares the address of roll call 2 with its own address.Only the IRC recognims roll call 2.The IRC processes the word in its digital controlsection the same way as the SLU did. The derived datais then sent to the input register where it is validated. Theinput register senses that the tag bit is a binary one. Thebinary one starts a 300-microsecond selective strobecounter and a 500-microsecond exhale word counter.The valid roll call 2 word is sent to all the displayregisters in the IRC, but because of the address, only theHF configuration status display register will receiveclock pulses. The clock pulses will shift the roll callword into the inhale word decoder and storage register.Here it will wait until the selective strobe pulse transfersthe parallel word to the lamp drivers. The selectivestrobe pulse is sent when the 300-microsecond countertimes out, signaling the end of the inhale word time.The lamp drivers turn on the lamps by applying agroundto the low side of the lamps. The high side of the lampsis supplied by the lamp dimmer control circuit.When the 500-microsecond timer times out, the IRCexhale word is applied to the multiplex lines. This wordis the SLU inhale word, and it is processed exactly likethe inhale word for roll call 1. The SLU will ensure thatthe enter bit is a binary one, and if so, will check thefrequency to see if it is a legal frequency. If thefrequency is legal, the word is processed and sent to theHF radio set in binary-coded-decimal (BCD) format. Ifthe word is an illegal frequency, the frequency that is setupon the thumbwheel switches (on the SLU face) is sentto the HF set in BCD format. The operating frequencystatus word, which is the next word to be exhaled by theSLU, will equal the frequency that was sent to the HFradio set. If the frequency selected on the IRC is legal,1-10
it will be used; if not, the frequency indicated by the SLUis usedROLL CALL 3.– The first part of roll call 3 is theSLU exhale word 3. This consists of the HF frequencystatus data. The word is built in the same manner as thefirst two words. This word is then inhaled by the IRCand processed and displayed. The IRC then exhales aroll call 3 word in the same manner as the first two, andthe cycle continues. The only exception is the UHFstatus words. The status display is shared by both UHFradio sets, but only the UHF set that is on-line will bedisplayed.ROLL CALL 4 THROUGH 12.– The digitalcontrol and input register sections of the SLU processthe inhale and exhale words, making the same decisionsas they did on the first three words. The buffers reactdifferently, depending on the current word or situation.Another difference during UHF configurationchanges occurs in the channel set/channel select andfrequency buffers. If the UHF frequency word has bits32 and 33 at binary zero, the word is sent directly to theUHF frequency buffer. There is a separate buffer foreach of the radio sets. When the word arrives at thebuffer, it is checked for validity. If the frequency isillegal, the frequency command sent to the UHF set is afixed-logic 300-MHz word that comes from the randomaccess memory (RAM) in the SLU. In either case, thefrequency is sent out in BCD format from the SLU tothe radio set. The status is sent to the IRC in the samemanner as for the HF status.If the channel set bit (bit 32) is a binary one, thefrequency and channel number is sent to the RAM forstorage. There is storage for 22 channels and frequenciesin the RAM. Each UHF radio set has its own RAM. Thechannel set data remains stored in the RAM until calledby bit 33. When bit 33 is a binary one, the channelnumber attached to the word addresses the frequencyassociated with that channel in the RAM. If the channeland frequency have been previously stored in the RAM,the frequency code is sent to the UHF frequency bufferfor processing. If they have not been set, the 300-MHzfrequency code is sent to the UHF frequency buffer forprocessing.The IRC/SLU roll call exchange ends with the firstpart of roll call 8. The SLU/crew ICS panels roll callexchange includes the last part of roll call 8 through thefirst part of roll call 12. Roll call 8 is recognized by theIRC and the copilot’s crew ICS panel. For the IRC, it isa status word as established by the tag bit. The copilotcrew ICS panel also recognizes the word and preparesto send an exhale word to the SLU. Further processingof the inhale word is inhibited by a transmit reset signal.A crew ICS panel responds to a single word;therefore, the digital control section can be greatlysimplified. Instead of an inhale word register, it hasinhale word logic. The address coming in is comparedwith the fixed identification logic. If the word isrecognized, the inhale word logic is stored for 800microseconds, and the transmit detector is set. At the endof 500 microseconds, the exhale word assemble registeris enabledThe exhale generator functions the same as theexhale word generators in the IRC. The exhale wordgenerator shifts the data under clock control to theexhale word assembly register, where the housekeepingbits are added. When the word is clocked out of theparity circuit, the reset-transmit detectors set. Resettingthe transmit detector enables the inhale word logic. Thedata word arriving at the SLU from the crew ICS panelis processed and sent to the ICS buffer. The ICS bufferprocesses the word and places the microphone andheadset in a selected configuration. The bit changecounter for TACAN, IFF, XMIT SEL, CONF 1, andCONF 2 switchlight selection is located in the ICSbuffer. This counter counts the times that the bitassociated with the function changes from binary one tobinary zero. The times the counter changes determineswhich function has been selected by a multiple functionselector switch.The status word from the SLU to the crew ICS panelis constructed and transmitted the same way as all otherwords. When the first part of roll call 9 is on themultiplex line, it is recognized by the TACCO crew ICSpanel, but it is also present in the copilot crew ICS panel.It is there because the word logic is still held open bythe address detector, which recognized roll call 8. Onlythe TACCO crew ICS panel will process the data.Processing of the roll calls continues in this fashionuntil the roll call rolls back to zero. At this point it startsall over again.VHF COMMUNICATIONSLearning Objective: Recognize componentsand operating principles of a VHF radiosystem.The AN/ARC-197 VHF communication systemprovides an aircraft with two-way, plain voice radiocommunications in the very high-frequency range. Itsactual frequency range is from 116.000 to 151.975 MHz.1-11
Figure 1-7.-VHF-AM control box.Figure 1-6-RT-1397/ARC-197 transceiver.In the P-3C aircraft, this system interfaces with four ofthe intercommunication stations in the transmit/receivefunctions. The pilot, copilot, TACCO, and NAV/COMMstations can transmit and receive over this radio. Theother stations in the aircrafl have receive function only.MAJOR COMPONENTSThere are three components to the AN/ARC-197system. These components are the RT-1397/ARC-197transceiver, the C-11067/ARC-197 VHF-AM controlpanel, and the 949880 VHF antenna.RT-1397/ARC-197 TransceiverThe RT-1397/ARC-197 transceiver (fig. 1-6) is asolid-state unit, consisting of a power supply, frequencysynthesizer, receiver modulator, and transmitter. Thereis one indicator, one push button, one microphone jack,and one headphone jack on the unit. The indicator islabeled TRANSMIT POWER, which illuminates whenoutput power is greater than 10 watts. The push buttonis labeled SQUELCH DISABLE, which will disable thesquelch for low signal levels. The microphone andheadphone jacks are used for maintenance andemergency VHF communication in case of ICS failurein-flight.C-11067/ARC-197 VHF-AM Control BoxThe control box (fig. 1-7) controls the operation ofthe system. There are two dual function knobs and adisplay window on the control panel. The displaywindow shows the selected frequency of the system.The outer ring of the dual function knob on the leftapplies system power and selects the test function. Theinner knob changes the frequency of operation in1-MHz steps over the range of control. The outer ringof the dual function switch on the right is labeled VOL,and it is not used in the P-3 aircraft. Volume is controlledby the ICS system. The inner knob of this control is usedto change the frequency of operation in 25-kHz stepsover the range of control.949880 VHF AntennaThe 949880 antenna is located in the tailcap on topof the vertical stabilizer of the P-3 aircraft. This antennaradiates and receives the VHF radio frequency signals.Signals routed to and from the antenna go through aVHF bandpass filter, which reduces the crosstalkbetween the VHF and UHF systems.VHF FUNCTIONAL DESCRIPTIONThere are two modes of operation with theAN/ARC- 197 radio. These two modes are receive andtransmit.Receive ModeIn the receive mode, the received RF signals fromthe antenna are routed through the filter, and applied tothe receiver circuits in the transceiver. The frequencyselected on the control box is applied to the frequencysynthesizer. The synthesizer uses a single phase-lockedloop to generate RF injection frequencies, in 25-kHzsteps, from 116.000 to 155.975 MHz. The RF injectionfrequencies, along with dc tuning voltages,electronically tune the receiver to the selectedfrequency. The AM detected audio is applied to theaudio amplifier circuit. Squelch circuits disable theoutput amplifier if the required signal-to-noise ratio orcarrier level is not present. The output audio is thenapplied to the ICS interconnection box for distributionto the various stations.1-12
Figure 1-8.-C-11950/ARC-187 control box.Transmit ModeIn the transmit mode, the VHF XMTR control signalfrom any one of the four ICS master control panelsapplies a ground to the transceiver as the VHF keysignal. This VHF key signal provides the push-to-talkcommand to the transceiver to switch it from the receiveto the transmit mode of operation. The synthesizergenerates transmitter drive frequencies from 116.000 to155.975 MHz in 25 kHz steps. Audio from any of thefour ICS master control boxes are applied to themodulator circuit. The modulator circuit provides90-percent amplitude modulation. The compressor andlimiter circuits are included to prevent over-modulation.The transmitter uses five stages of amplifiers to raise theoutput to 20 watts. The RF output is routed to theantenna, through the filter, for radiation. The transceiveralso produces a sidetone output, which is provided to theICS system in the same manner as the receiver audio.UHF COMMUNICATIONSLearning Objective: Recognize componentsand operating principles of the UHF radiosystem.The AN/ARC-187 UHF radio system consists of theUHF-1 radio set, UHF-2 radio set, and the interfacingequipment. The UHF communication system providesamplitude modulation, frequency modulation, andfrequency shift key (FSK) operations. The frequencyrange of this radio system is 225.000 to 399.975 MHz.MAJOR COMPONENTSEach radio set in the system consists of anRT-1571/ARC-187 receiver transmitter, a C-11950(V)3/ARC-187 radio control, an AT-879/ARC antenna, and a740645 antenna switching relay. The UHF-2 radio setalso contains a 974924 antenna select panel. Theantenna and the antenna switching relay will not bediscussed in detail in this manual.RT-1571/ARC-187 Receiver TransmitterThe RT-1571/ARC-187 receiver transmittercontains all the circuitry for the normal operation of theUHF radio set.C-11950/ARC-187 Radio Control BoxThe C-11950/ARC-187 control box (fig. 1-8)provides all the controls for normal operation of theradio set. We will be discussing each of the controls and1-13
indicators in the following text. Each numbercorresponds to a pointer in figure 1-8.1. Preset channel selector switch–Selects anyoneof 20 preset channels.2. CHAN indicator–Indicates channel selected bythe preset channel selector.3. SET switch–Sets anyone of the available 7000normal mode frequencies.4. MEMORY read display–Displays the frequencythat has been selected by preset channel selector.5. Memory READ switch–Allows selected frequencyto be displayed.6. Manual frequency selector switch–Selectshundredth and thousandth’s digit of the desired manualfrequency in steps of 25 (00, 25, 50, or 75).7. Manual frequency selector switch–Selects thetenth’s digit of desired manual frequency (0 through 9).8. Manual frequency selector switch–Selectsunit’s digit of the desired manual frequency (0 through9).9. Manual frequency selector switch–Selectsten’s digit of the desired manual frequency (0 through9).10. Manual frequency selector switch–Selectshundred’s digit of the desired manual frequency (either2 or 3). In the A position, the radio set in an antijammingmode. In the T position, the radio set is enabledfor transmission and reception for one minute.11. Function selector switch–Selects operatingmodes.a. OFF–Shuts down the radio set.b. T/R–Enables main receiver and transmitter.c. T/R+G–Enables main receiver, transmitter,and guard receiver.d. ADF–Sets the receiver transmitter to the AMmode for automatic direction findingoperations.e. SATCOM–Allows Satellite Communicationsby setting the receiver transmitter to theSATCOM mode.12. FAULT status indicator–Steady illuminationindicates an RT fault, a slow flash (1/sec) indicates aninterface fault, and a fast flash (4/sec) indicates a controlbox fault.13. TONE switch–Enables transmission of anaudible tone on the selected frequency.14. SONOBUOY COMMAND/MANUAL/PRESET/GUARD–This switch selects the mode offrequency selection.a.b.c.d.SONOBUOY COMMAND–This positioncauses the radio set control to deliver a serialdata stream corresponding to a presetfrequency in the controls memory.MANUAL–In this position the frequency ismanually selected using the five manualfrequency selector switches.PRESET–The frequency is selected usingthe preset channel selector switch. Thisposition is also used for programming the 20preset channels.GUARD–This automatically tunes the mainreceiver and transmitter to the guardfrequency and disables the guard receiver.15. SQUELCH ON-OFF switch–Enables anddisables the squelch circuits of the main receiver.UHF-2 Antenna Select PanelThe UHF-2 antenna select panel (fig. 1-9) selectswhich antenna the UHF-2 radio set will use duringoperation. There is one two-position switchlight on thispanel. The switchlight is marked UP ANT and LOWANT. When the upper tailcap antenna is selected, the UPANT portion of the switchlight will be illuminatedamber. When the lower antenna is selected, the LOWANT portion will be amber.UHF MODES OF OPERATIONFigure 1-10 shows a simplified block diagram of theUHF system.The UHF-1 radio set provides the following modesof operation: plain voice, cipher voice, ADF navigation,plain voice guard, cipher voice guard, and secureSATCOM. The UHF-2 radio set provides plain voice,cipher voice, sonobuoy command, wide-band audio,plain voice guard, cipher voice guard, link 11 plain data,link 11 cipher data, TTY plain data, TTY cipher data,and IACS data.Operation of these radio sets is supported by variousequipment on board the aircraft. Mode selection forUHF-1 is accomplished by the control box and the A344voice selector. Mode selection for UHF-2 is1-14
Table 1-3.-UHF-1 and UHF-2 Operating Modesguard receiver is a separate module and is a completeand independent fixed-tuned, crystal-controlledreceiver that operates on the guard frequencies. Thereceiver sections receive command signals from thecontrol box, placing it in the proper condition for themode selected. All receiver outputs derived from guard,FM, FSK, wide-band, and voice modes are routedthrough the audio interface, and then switched throughthe COMM switching matrix to the external equipment.UHF-2 ReceiveThe RF signal received at the UHF tailcap or UHFlower antenna is coupled into the UHF-2 RT through theantenna switching relay, and the UHF filter. From thispoint on, the operation is the same as in the UHF-1 radioset.Modes of OperationTable 1-3 shows the modes of operation for the tworadio sets.HF COMMUNICATIONSLearning Objective: Recognize componentsand operating principles of the HF radiosystem.The AN/ARC-161 HF radio system providestwo-way communications between the aircraft and anysimilarly equipped platform. It provides transmission,reception, and processing of intelligence and tacticaldata. The cipher voice communication is provided bythe TSEC/KY-75 high-frequency security unit.1-16
Figure 1-11.-C-9245/ARC-161 control box.The HF communication system consists of tworadio sets and interfacing equipment. These sets arecalled HF-1 and HF-2. The two radio sets providetwo-way, single-sideband (SSB) and plain voice (AME)communication in the frequency range of 2.0000 to29.9999 MHz, and they automatically tune 280,000channels at 100-HZ intervals. The HF-1 antenna has fourdegraded frequency ranges at which coupling might notbe possible: 4.8000 to 6.0000 MHz, 12.0000 to 13.2000MHz, 19.1000 to 20.3000 MHz, and 26.5000 to 27.7000MHz. The HF-2 antenna has two degraded frequencyranges where coupling might not be possible: 7.9000 to9.1000 MHz and 18.9000 to 20.1000 MHz.HF MAJOR COMPONENTSEach AN/ARC-161 radio set in the HFcommunications system consists of the followingcomponents: a RT-1000/ARC-161 receiver transmitter,an AM-6561/ARC-161 RF amplifier, a C-9245/ARC-161 control box, a CU-2070/ARC antennacoupler (which includes a lightning arrester), and along-wire antenna. Both radio sets share the use of aTSEC/KY-75 security unit and TSEC/KY-75 remotecontrol unit.RT-1000/ARC-161 Receiver TransmitterThe RT-1000/ARC-161 receiver transmittercontrols the radio tuning, coupler tuning, and modeselection. It also contains all circuitry required for thegenerating of transmitter signals and the processing ofreceived RF signals into audio/data signals.AM-6561/ARC-161 Radio-Frequency AmplifierThis component amplifies the output of the RT priorto transmission.C-9245/ARC-161 Control BoxThe C-9245/ARC-161 control box (fig. 1-11)controls the operation of the HF radio set. There are twoof these in the aircraft, one for each radio set. They areidentical and interchangeable. Refer to figure 1-11 whilereading the following text.1 through 6.desired frequency29.9999 MHz.MHz select switches–Selects thein the operating range of 2.0000 to1-17
7.8.9.10.11.12.13.14.15.16.17.SQ control knob–Controls the amount ofsquelch threshold voltage in VO and AMEoperations.SQ OFF switch–When this switch is pressed,the squelch circuits are disabled.CPLR READY indicator–This indicator willilluminate when the associated coupler isproperly tuned.CPLR FAULT indicator–This indicator willilluminate to indicate improper tuning of theassociated coupler.SYS READY indicator–This indicator willilluminate when the radio set has passed theself-test routine.SYS FAULT indicator–This indicator willilluminate anytime the radio set fails self-test.RESET switch–This switch resets the SYSFAULT indicator to a GO condition after aNO-GO condition was detectedXMTR OFF indicator–When this indicator isilluminated the radio set cannot be used totransmit. This indicator will come on during the3-minute warmup period (the first 3 minutes ofinitial power up), and anytime the operatingfrequency is changed by more than 1 MHz.Other than that, anytime there is a fault in thesystem that affects the transmitter, thisindicator will illuminate.VOL control–This control knob is not used inthe P-3 aircraft configuration.BLANKER ON switch–This switch is not usedin the P-3 aircraft configuration.COND switch–This switch selects the radioset’s condition of operation.a. OFF–This position removes primary powerfrom the radio set.b. STBY–Applies power to the radio set’s RFAmp final stage filament, frequencystandard and other critical circuits.c. HI–Energizes the radio set and sets thetransmitter for high-power output.d. LO–Energizes the radio set and sets thetransmitter for low-power output.e. TEST–Initializes the radio set’s self-testfunctions.18. MODE switch–This switch selects the radioset’s mode of operation.a.b.c.d.VO–This position permits forced modeselection by the COMM system selectorpanel.AME–This position permits AMEtransmission and reception.CW–With the switch in this position, theradio set will transmit and receivecontinuous-wave signals.DATA, DIV, LSB–In this position, permitsforced mode selection by the COMM systemselector panel.CU-2070/ARC CouplerThe CU-2070/ARC coupler (fig. 1-12) providesimpedance matching between the receiver transmitterand the antenna. The lightning arrester provides a sparkgap to protect the radio if lightning strikes the long-wireantenna.Long-wire AntennaThere are two antennas used in the P-3 aircraft forthe HF system. Both are located external of the aircraft,and stretch from the top of the vertical stabilizer to thefuselage. The one on the left is used by HF-1, and theone on the right is for the HF-2 radio set. Both of the topmounts for the antennas are the breakaway type. If eitherantenna breaks in flight, the wire will depart the aircraft.This is designed for safety reasons. Should the wire gethung up and not depart the aircraft, structural damagecould occur from the wire whipping against thefuselage.TSEC/KY-75 Security UnitThe TSEC/KY-75 provides the encoding anddecoding of the signals when the radio set is in the ciphermode.Figure 1-12.-CU-2070/ARC coupler.1-18
and the PWR/FILL switch is not in theOFF/ZEROIZE position.5.6.SIG CLR switch–This switch is pressed toenable the till operation if the TSEC/KYK-13 orTSEC/KOI-18 is attached If a fill device is notattached pressing this switch will cause thesecurity unit to preamble.FILL connector–This connector connects thefilling device to the TSEC/KY-75 security unitelectrically. This enables the operator to loadkeys into the security unit.HF FUNCTIONAL DESCRIPTIONFigure 1-13.-TSEC/KY-75 remote control unit.TSEC/KY-75 Remote Control UnitThe TSEC/KY-75 remote control unit (RCU) isshown in figure 1-13. This unit enables the operator tooperate the security unit without moving from theNAV/COMM station in the aircraft. The following is anexplanation of the various controls and indicators on theRCU.Both radio sets function in the same manner; theonly difference between the two is the peripheralequipment used. Figure 1-14 shows a system blockdiagram.Receive FunctionThe RF signal is received by the antenna, coupledthrough the coupler and the de-energizedtransmit-receive relay in the RF amplifier, and finally tothe receiver transmitter receiver RF input. RF-to-audioconversion is accomplished in the receiver section usinginputs from the frequency synthesizer. The recoveredaudio component is amplified to a power level sufficientto be used as an audio input to the peripheral equipment.1.2.3.4.ALARM indicator–This indicator willilluminate whenever there is an alarm conditionin the security unit.TSEC/KY-75 RCU switch–This switch is notused.PWR/FILL switch–This is a four-positionswitch used to select the key and storagelocations for the various codes used.ab.OFF/ZEROIZE–This position will zeroize allvariables stored in the TSEC/KY-75 securityunit. To select this position, the operator mustpull the knob out 1/4 inch and turn itcounterclockwise. This prevents accidentalzeroizing during flight.1, 2, 3–These positions select a particular keyfor the cipher transmission or reception. Theyalso select the storage area when the key isloaded into the TSEC/KY-75.PWR indicator–This indicator will illuminatewhite when power is applied to the security unitTransmit FunctionDuring the transmit function, voice or data signalsfrom the peripheral equipment are switched through theCOMM switching matrix to the USB and LSB transmitaudio inputs to the receiver transmitter. A keying signalis also applied from the peripheral equipment. Foremergency or maintenance operations, voice and keyingsignals can originate at the mic/headset assemblyconnected directly to the receiver transmitter.Figure 1-14.-HF system block diagram.1-19
Figure 1-15.-PP-6140/ACQ-5 power supply.Audio-to-RF conversion is accomplished when thecarrier frequency is modulated by the audio input. Themodulated RF is amplified by the RF amp to the selectedpower level of 400 or 1000 watts, depending on themode selected on the control box, and then coupled tothe antenna for transmission.DATA LINK SYSTEMLearning Objective: Recognize componentsand operating principles of a data link system.Figure 1-16.-C-7790/ACQ-5 control monitor panel.The data link system serves as a communicationslink that allows computer-to-computer exchange of databetween participating units. Airborne platforms capableof data link include Air Force AWACS, P-3 patrolaircraft, and most carrier aircraft. Surface or subsurfaceplatforms equipped with Navy tactical data systems(NTDS) may also receive and transmit information overdata link. The data transmitted is sent by the centralcomputer to a communications interface, whichreformats the data into serial digital data (standardNTDS) transmission language. The serial data is thenencrypted and passed through a modulator/demodulatorto make it compatible with the P-3 radios. Either HF-1,HF-2, or UHF-2 may be used to transmit and receivedata link.In general, the data link system is designedexclusively to transmit tactical symbology. Thissymbology is available in the aircraft for display on theTACCO display. An additional function is plain text.This allows transmission for text information throughlink net. This information is available only to certainairborne platforms (P-3, E-2) and shore-based antisubmarinewarfare operating centers (ASWOCs).Control of the data link setup and monitoring of theactive link net is the responsibility of the NAV/COMM.Once it is set up and operating, the only softwarefunction available to the NAV/COMM is plain texttransmission and reception. The TACCO controls thetransmission of all tactical data from the aircraft.DATA LINK SYSTEM COMPONENTSThe major components of the data link system arediscussed in the following text.Data Terminal Set Converter-Control,CV-2528/ACQ-5This component is a modulator/demodulator(modem) that takes 26-bit serial digital data from thedata communications interface and converts it into audio1-20
panel is in OFF. If the DTS control panel is ON, thepower supply supplies primary power to the system. TheTEST/FAULT switch initiates a test of the power supplyvoltage selected on the wafer switch.Data Terminal Set Control-Monitor Panel,C-7790/ACQ-5Located at the NAV/COMM station, this unit (fig.1-16) allows control over the modem. It enables controlof operating mode, self-test functions, and operationalsystem monitoring. The DTS control panel wasdesigned to be a single control box for multiple systems;therefore, it has many functions that are not currentlyused.Communications Interface No. 2Figure 1-17.-Communications interface No. 2.tones that can be transmitted over a voice radio. Thedigital numeric readouts and a test button on the front ofthe modem display fault indications when the system isoperating in the TEST mode. The left display indicatesdigital control unit (DCU) faults, and the right displayindicates modem faults.Data Terminal Set Power Supply,PP-6140/ACQ-5This component (fig. 1-15) provides primary powerto the modem and to the data terminal set control panel.The power supply is mounted next to the modem. Twoswitchlights and a wafer switch are on the front panel.The POWER/STANDBY switch applies power to thepower supply if the data terminal set (DTS) controlThis unit (fig. 1-17) provides the connectionbetween the central computer and the data link system.It converts 30-bit parallel binary computer data wordsinto 26-bit serial data transmission language. Severalwafer switches and indicators are provided on the boxfor troubleshooting. The two switches on the right sideof the box, labeled CLOCK SELECT and MASTERCONTROL, must be in the OPERATE position fornormal data link operation. When these switches are inOPERATE, all other switches are inoperative.DATA LINK SYSTEM DESCRIPTIONA block diagram of the data link system is shown infigure 1-18.The NAV/COMM has primary responsibility for thehardware setup of the data link system, In general,during preflight the NAV/COMM selects an HF or UHFFigure 1-18.-Data link system block diagram.1-21
link frequency. A picket unit (PU) address is obtainedfrom the net controller and inserted into the dataterminal set. An appropriate data mode is then selectedon the communication selector panel and the cipher dataselected amber for encrypted operation. Once thesesteps are completed, the hardware is setup and ready forthe software initialization.The data link system formats tactical informationinto blocks of fixed length, called “frames.” Each framecontains a 4-bit header block which serves as a controlcode to tell the modem what type of data follows, and26 bits of serial information. The 26 bits of data includean address that identifies the originating PU or theDNCU, type of information, the tactical data, and acheck sum (parity check).Data Link TermsThere are four commonly used data link terms thatyou must be familiar with to work with data linksystems. These four terms are discussed in the followingparagraphs.Participating unit is any ship, aircraft, or shorestation that is active in the data-link net.Data Net Control Unit (DNCU) is the participatingunit that has overall control over the link net. Only oneDNCU maybe active in the net.Picket Unit (PU) is any station in the net that is notthe DNCU. As many as 20 units are allowed as PUs.Data Link Reference Position (DLRP) is the latitudeand longitude position that is used as a reference for alldata transmitted on the net. When a participating unit isoperating below 60 degrees north or south latitude, thisposition must be within 1024 minutes of latitude of theunit. Above 60 degrees north or south latitude, 2048minutes of latitude is allowed.Modes of OperationRoll call is the normal system operation mode. TheDNCU sends out a message requesting each PU, in acertain order, to respond with tactical data. Thetransmitted data is available for use by all units in thenet, but is displayed only if the participating unit isentered into the individual system. In the P-3C,participating units must be entered in the data linkcontrol tableau to have their data accepted for displayby the computer. All received data is sent to the centralcomputer, which then looks at the label portion of thedata message to determine if the information should beignored or displayed.When acting as a DNCU, the participating unitselects CONTROL and ROLL CALL on the DTS. Thehardware/software system automatically transmits therequest-for-transmit message to each unit entered in thedata link control tableau.When a surface ship or an antisubmarine warfareoperating center (ASWOC) is DNCU, PICKET isselected on the DTS. The hardware/software transmitsonly when a request for data is received from the DNCU.If no request is received, the modem does not transmit.Two modes of operation used for data link nettransmission are LONG BROADCAST and SHORTBROADCAST. LONG BROADCAST, when selected,transmits continuously as long as the function remainsactive. SHORT BROADCAST transmits a single set ofdata when the switchlight is pressed. A broadcast net isnormally used to preserve emission control (EMCON)conditions (roll call not being conducted by the DNCU)until one of the PU’s obtains significant information fortransmission to the net. The picket unit or DNCU thentransmits the data to the net continuously untildeactivated in the long broadcast mode or to the netone-time in the short broadcast mode. The DNCU mayelect to use the broadcast functions while conductingroll call to increase the probability of data reception bypickets. Pickets do not use the broadcast functionsduring roll call by the DNCU since the transmissionswill not be synchronized with the roll call and mayinterfere with transmission from the DNCU.When radio silence is selected, the DTS will receivedata only. Even if a request for data is received thesystem cannot transmit. All information received is sentto the central computer.TELETYPE SYSTEMLearning Objective: Recognize componentsand operating principles of a teletype system.The teletypewriter system is an integratedcommunications system that provides the ability totransmit and receive encrypted information withcompatible ships, aircraft, and ground stations. Thekeyboard portion of the teletype inputs data into acentral computer.There are basically two modes of teletypeoperations: on-line and off-line. In the on-line mode,data is sent from the central computer through theteletype system. Received data is routed to the computer.In the off-line mode, the characters that are typed into1-22
the keyboard are sent directly. Received data is printedon the high-speed printer adjacent to the keyboardThree radios are available in the aircraft for TTYtransmission and reception: UHF-2, HF-1, and HF-2.The TSEC/KW-7 security unit provides encryption anddecryption for all teletype data. The teletype informationis always routed through the TSEC/KW-7 for encryptionand decryption.SYSTEM COMPONENTSThe following is a brief descriptioncomponents of the teletype system.of the majorKeyboard Transmitter TT-568/AGC-6Figure 1-19-Keyboard transmitter TT-568/AGC-6.The keyboard transmitter is shown in figure 1-19.This unit controls the TTY system. In addition to astandard keyboard, there are special function keysprovided.Teleprinter TT-567This unit (fig. 1-20) is a high-speed printer. Itcontains the necessary hardware and logic circuitry toprocess baudot inputs and produce hard-copy outputs.TTY Signal Data ConverterFigure 1-20.-Teleprinter TT-567.This unit (fig. 1-21) provides an interface betweenthe TTY and the radios. It converts teletype language(baudot code) into audio tones, which can be transmittedFigure 1-21.-TTY signal data converter.1-23
Teleprinter Secure InterfaceMounted under the TTY keyboard, this unitprovides remote selection of secure or clear TTYoperation. By placing the red guarded TTY/TPR switchto the BYPASS position, the operator closes a relay tobypass the TSEC/KW-7.Communications Interface No. 1Figure 1-22.-COMM interface No. 1.over voice radio. Switches on the front of the boxprovide control over data conversion,TSEC/KW-7 Security UnitThis unit provides encryption and decryption of thebaudot code. It is usedoperation.whenever the teletype is inTSEC/KWX-7 securityUnit (RCU)Unit Remote ControlThis unit is located next to the TTY keyboard andenables the operator to control the TSEC/KW-7 withouthaving to leave his/her seat.This unit (fig. 1-22) connects the TTY system withthe central computer. It converts the baudot code into30-bit, parallel, binary computer language. The switchesand controls on the front of the interface are inoperativein the OPERATE mode.TELETYPE SYSTEM OPERATIONFigure 1-23 shows the teletype system blockdiagram.Off-line operation of the TTY system requires theoperator to select an appropriate frequency on the HF-1,HF-2, or UHF-2 control panel and to select TTY modeon the communications selector panel. The selectedradio is automatically mode forced into a datatransmission mode. The operator selects words perminute (WPM) speed (normally 100) and TTY on theHSP, and DIR SEND on the TTY keyboard. Phasing theTSEC/KW-7 sends a synchronization signal that isreceived by all other units on the frequency. Once allunits are synchronized, they are ready to accept data.When a key is depressed on the TTY keyboard, thecorresponding baudot code is generated. This is sent toFigure 1-23.-Teletype system block diagram.1-24
the signal data converter, where it is converted to audiotones and then transmitted out over the selected radio.When the message is complete, REC (receive) isselected on the keyboard. This selection allows thesystem to receive phase tones and incoming messagesfrom other stations on the frequency.The on-line mode is designed to simplify the workof the operator. Actual system operation is covered invarious software publications. In general, the operatortypes an outgoing message in the central computer. Theoperator performs all the operations described above,except XMIT is selected on the TTY keyboard.Depression of the XMIT switch on the keyboard directsthe central computer to send the stored message throughCommunications Interface No. 1 into the TTY system.In the same manner, when REC is selected on thekeyboard and CMPTR selected on the HSP, anyincoming messages are sent to the central computer.Currently, the computer has the ability to store onemessage of approximately 800 characters for review bythe operator.In addition to teletype data, the TTY system cansend and receive data to and from the central computer.In input data, the operator simply selects CONST &EDIT on the keyboard. Any keyboard depressions arethen sent to the central computer via thecommunications interface.To produce hardcopy of computer data, CMPTR isselected on the HSP. Software functions then allow thecentral computer to print data on the HSP viaCommunications Interface No. 1. This data is sent at3,000 words per minute regardless of the WPM SPEEDswitch on the HSP.Q1.Q2.Q3.Q4.Q5.Q6.Q7.Q8.Q9.Q10.Q11.Q12.Q13.REVIEW QUESTIONSWhat is the most important means of communicatingin the Navy today?What frequencies are included in the superhigh-frequency band?How many LS-602/AI panels are there in atypical aircraft?What type of encoding/decoding is used in theICCG system?What is the actual frequency range of theAN/ARC-197 radio set?How many preset channels are available with theAN/ARC-187 radio set?What fault is indicated when the fault indicatoron the C-11950/ARC-187 control box flashes ata slow rate?The HF-2 long-wire antenna has degradedoperation at which frequencies?What is the purpose of the lightning arrester usedin the HF system?What radio sets can be used with the data linksystem?Who has primary responsibility for the hardwaresetup of the data link system?Which unit in the TTY system provides theinterface with the radios?Which unit connects the TTY system with thecentral computer?1-25
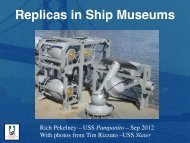
CHAPTER 2NAVIGATIONThe term navigation is defined as the process ofdirecting the movement of a craft from one point toanother. Air navigation, unlike sea or navalnavigation, involves movement above the surface ofthe earth. There are unique conditions encountered inair navigation that have a special impact on thenavigator.. Need for continued motion. A ship can stopand resolve any uncertainty of motion or wait formore favorable conditions if necessary. Most aircraftmust keep going.l Limited endurance. Most aircraft can remainaloft for relatively short periods of time, usuallyfigured in hours.. Greater speed. Because of the high rate ofspeed, the navigation methods and procedures mustbe done quickly and accurately.. Effect of weather. Visibility affects the use oflandmarks. The wind has a more direct effect onaircraft position than on ships or vehicles. Changes inatmospheric pressure and temperature affect theheight measurement of aircraft using barometricaltimeters.Some type of navigation has been used ever sincehumans started to venture away from their homes.Exactly how they managed to find their way willremain a matter of conjecture, but some of theirmethods are known. The Greeks used primitivecharts and a crude form of dead reckoning. They usedthe Sun and the North Star to determine direction.The early explorers used the astrolabe (fig. 2-1). Itwas not until the early 1700’s that an accuratetimepiece (chronometer) and the sextant wereinvented, which made accurate navigation possible,even when far from land.Figure 2-1.-The ancient astrolabe.2-1
Navigation is both an art and a science. Thescience part is the development of instruments andprocedures of navigation, along with thecomputations involved. The art is the skillful use ofthe instruments and the interpretation of the data.This combination has led some to call navigation a“scientific art.”The beginning navigators practiced the science ofnavigation, in that they gathered data and used it tosolve a navigational problem in a mechanical way. Ittakes many hours of flying for navigators to realizethat their total role involves not only the mechanics ofnavigation, but an integration based on judgement.They build accuracy and reliability into theirperformance by applying sound judgment based onexperience. Navy navigators must be able to planmissions covering every possible situation. In flight,they must evaluate the progress of the aircraft andplan for the remainder of the mission. High-speednavigation demands that they have the ability toanticipate changes in flight conditions and make thecorrect decisions immediately ahead of thosechanges.The purpose of air navigation is to determine thedirection of travel needed to end up at the desiredlocation, to locate positions, and to measure distanceand time as a means to that end. This chapter dealswith the various types of navigation and theequipment used in aviation navigation. You mustknow and understand this information in order to trainyour subordinates.METHODS OF NAVIGATIONLearning Objective: Recognize the variousmethods of navigation.There are certain terms that you must know tounderstand navigation. The navigator uses theseterms to express and accomplish the practical aspectsof air navigation. These terms are position, direction,distance, and time. These terms are defined asfollows:Position is a point defined by stated or impliedcoordinates. It always refers to some place that canbe identified. A navigator must know the aircraft’simmediate position before he/she can direct it toanother position.Direction is the position of one point in spacerelative to another without reference to the distancebetween them. Direction is not in itself an angle, butit is measured in terms of its angular distance from areference direction.Distance is the spatial separation between twopoints and is measured by the length of a linejoining them. On a plane surface, this is a simpleproblem. However, consider distance on a sphere,where the separation between points may beexpressed as a variety of curves. The navigatormust decide how the distance is to be measured.This distance can be expressed in various units;miles, yards, etc.Time is defined in many ways, but for ourpurposes, it is either the hour of the day or an elapsedinterval.These terms represent definite quantities orconditions that can be measured in severaldifferent ways. The position of an aircraft maybe expressed as coordinates such as latitude andlongitude, or as being 10 miles south of a certainlandmark. It is vital that navigators learn how tomeasure quantities and how to apply the units bywhich they are expressed.EARTH’S SIZE AND SHAPEFor navigational purposes, the earth is assumed tobe a perfect sphere, although it is not. There is anapproximate 12-mile difference between the highestpoint and the lowest point of the earth’s crust. Thevariations in the surface (valleys, mountains, oceans,etc.) give the earth an irregular appearance.Measured at the equator, the earth isapproximately 6,887.91 nautical miles in diameter.The polar diameter is approximately 6,864.57 nauticalmiles. This difference of 23.34 nautical miles is usedto express the ellipticity of the earth.Great Circles and Small CirclesA great circle is defined as a circle on the surfaceof a sphere whose center and radius are those of the2-2
sphere itself. It is the largest circle that can be drawnon the sphere; it is the intersection with the surface ofthe earth of any plane passing through the earth’scenter.The arc of a great circle is the shortestdistance between two points on a sphere, just as astraight line is the shortest distance between twopoints on a plane. On any sphere, an infinitenumber of great circles may be drawn throughany point, though only one great circle may bedrawn through any two points that are notdiametrically opposite (fig. 2-2).Circles on the surface of the sphere other thangreat circles may be defined as small circles. A smallcircle is a circle on the surface of the earth whosecenter and/or radius are not that of the sphere. Aspecial set of small circles, called latitude is discussedlater.The intersection of a sphere and a plane is acircle—a great circle if the plane passes throughthe center of the sphere, and a small circle if itdoes not.Latitude and LongitudeThe nature of a sphere is such that any point onit is exactly like any other point. There is neitherbeginning nor ending as far as differentiation ofpoints is concerned. So that points may be locatedon the earth, some points or lines of reference arenecessary so that other points may be located inregard to them. The location of New York City withreference to Washington, D. C., is stated as a numberof miles in a certain direction from Washington,D.C. Any point on the earth can be located thesame way.This system does not work well in navigation.A point could not be precisely located inmid-Pacific Ocean without any nearbygeographic features to use as a reference. Asystem of imaginary reference lines is used tolocate any point on earth. These reference linesare the parallels of latitude and the meridians oflongitude.Figure 2-2.-A great circle is the largest circle in a sphere.LATITUDE.— Each day the earth rotates once onits north-south axis. This axis terminates at the twopoles. The equator is constructed at the midpoint of2-3
this axis at right angles to it (fig. 2-3). A great circledrawn through the poles is called a meridian, and aninfinite number of great circles maybe constructed in thismanna. Each meridian is divided into four quadrants bythe equator and the poles. Since a circle is divided into360 degrees, each quadrant contains 90 degrees.Take a point on one of these meridians 30 degreesnorth of the equator. Through this point passes a planeperpendicular to the north-south axis. This plane willbe parallel to the plane of the equator, as shown infigure 2-3, and will intersect the earth in a small circlecalled a parallel or parallel of latitude. This particularparallel of latitude is called 30°N, and every point onthis parallel will be at 30°N. Parallels can beconstructed at any desired latitude.The equator is the great circle midway betweenthe poles. The parallels of latitude are small circlesconstructed with reference to the equator. Theangular distance measured on a meridian north orsouth of the equator is known as latitude and formsone component of the coordinate system.LONGITUDE.— The latitude of a point can beshown as 20°N or 20°S of the equator, but there is noway of telling whether one point is east or west ofanother. This is resolved by the use of the othercomponent of the coordinate system—longitude.Longitude is the measurement of this east-westdistance.There is not a natural starting point for numberinglongitude. With latitude, the starting point is theequator. This problem was solved by selecting anarbitrary starting point. Many places had been used,but when the English speaking people began to makecharts, they chose the meridian through their principalobservatory in Greenwich, England. This meridianhas now been adopted by most other countries as thestarting point. This Greenwich meridian is sometimescalled the prime meridian or first meridian, thoughactually it is the zero meridian. Longitude is countedeast or west from this meridian through 180 degrees.The Greenwich meridian is the 0-degree meridian onone side of the earth and the 180th meridian aftercrossing the poles (180 degrees east or west of the0-degree meridian).If a globe has the circles of latitude and longitudedrawn on it according to the principles described, andthe latitude and longitude of a certain place have beendetermined, this point can be located on the globe in itsproper position (fig. 2-4). In this way, a globe can beformed that resembles a small-scale copy of the earth.Latitude is measured in degrees up to 90, andlongitude is expressed in degrees up to 180. The totalnumber of degrees in any one circle cannot exceed360. A degree (°) of arc may be subdivided intosmaller units by dividing each degree into 60 minutes(’) of arc. Each minute can be divided into 60 seconds(“) of arc. Measurement may also be made indegrees, minutes, and tenths of minutes.Figure 2-3.-Planes of the earth.2-4
The rate of change of position is determined byspeed. Speed is expressed in miles per hours, eitherstatute miles or nautical miles. If the measure ofdistance is nautical miles, it is customary to use theterm knots. A speed of 200 nautical miles per hourand a speed of 200 knots are the same. The phrase“200 knots per hour” is incorrect unless you arereferring to acceleration.DirectionFigure 2-4.-Latitude is measured from the equator;longitude from the prime meridian.A position on the surface of the earth is expressedin terms of latitude and longitude. Latitude is thedistance, either north or south, from the equator.Longitude is the distance, either east or west, from theprime meridian.DistanceDistance as previously defined is measured by thelength of a line joining two points. In navigation, themost common unit for measuring distance is thenautical mile. For most practical navigation, all of thefollowing units are used interchangeably as theequivalent of 1 nautical mile:. 6,076.10 feet (nautical mile)Direction is the position of one point in spacerelative to another without reference to the distancebetween them. The time-honored system forspecifying direction as north, northwest, west, etc.,does not meet the needs of modern navigation. Anumerical system meets the needs better for mostpurposes. The numerical system (fig. 2-5) divides thehorizon into 360 degrees, starting with north as 000degrees. Going clockwise, east is 090 degrees, south180 degrees, west 270 degrees, and back to north.The circle, called a compass rose, represents thehorizon divided into 360 degrees. The nearly verticallines represent the meridians, with the meridian ofposition A passing through 000 degrees and180 degrees. Position B lies at a true direction of 062degrees from A, and position C is at a true direction of295 degrees from A.Determination of direction is one of the mostimportant parts of the navigator’s job. In order for thenavigator to accomplish this task, the various termsinvolved must be clearly understood. Unlessotherwise stated, all directions are called true (T)directions.l One minute of arc of a great circle on a spherehaving an area equal to that of the earthl 6,087.08 feet. One minute of arc on the earth’sequator (geographic mile)l One minute of arc on a meridian (1 minute oflatitude). Two thousand yards (for short distances)It is sometimes necessary to convert nautical milesinto statute miles or statute miles into nautical miles.This conversion is made with the following ratioThis means that 1 nautical mile equals 1.15 statutemiles.Figure 2-5.-Numerical system used in air navigation.2-5
. Course is the intended horizontal direction oftravel.. Heading is the horizontal direction in which anaircraft is pointed. Heading is the actual orientationof the longitudinal axis of the aircraft at any instant,while the course is the direction intended to be madegood.. Track is the actual horizontal direction madeby the aircraft over the earth.. Bearing is the horizontal direction of one pointto another (fig. 2-6). The direction of the island fromthe aircraft is marked by the line of sight (visualbearing). Bearings are usually expressed in terms ofone of two reference directions: (1) true north, or (2)the direction in which the aircraft is pointed. If truenorth is being used as the reference, the bearing iscalled a true bearing. If the heading of the aircraft isthe reference, the bearing is called a relative bearing.DEAD RECKONINGDead reckoning (DR) navigation is a very simpleway of navigating. It uses speed and headingmeasurements to compute position changes from aninitial position fix. One of the oldest automaticnavigation systems is the dead reckoning analyzer,which takes its speed from the ship’s log and itsheading from the ship’s gyrocompass to computelatitude and longitude.The error in dead reckoning, as a percentage ofdistance traveled, commonly reaches 2 to 5 percent.As the distance between fixes increases, the accuracyof the dead reckoning must be increased to maintain asmall absolute position error.The two major causes of error in positioncomputed by dead reckoning are errors in themeasurements of heading and speed. A heading errorof 1 degree introduces an error of 1.75 percent ofdistance traveled. A speed error of 1 percentintroduces an error of 1 percent of distance traveled.The total system error becomes about 2 percent ofdistance traveled. Increasing the accuracy of thespeed and heading measurements will increase thesystem accuracy.The various methods of dead reckoning and thedevices that are used are described in detail in<strong>Aviation</strong> <strong>Electronics</strong> <strong>Technician</strong> 2 (Organizational),NAVEDTRA 12330. It is strongly recommended thatyou take the AT2(0) Nonresident Training Course,NAVEDTRA 82330, to get a better understanding ofthe above information.ELECTRONIC ASSISTED NAVIGATIONWhile a navigator can successfully navigate anaircraft using basic mechanical instruments and thedead reckoning procedures, the use of electronicpositioning equipment will greatly increase theaccuracy of the navigation. The various fixingdevices such as loran, TACAN, omega, VOR, etc.,will be discussed in detail later in this chapter.Figure 2-6.-Measuring true and relative bearing.2-6
The first radio systems were developed to keepthe pilots informed of weather information along theflight path. The development of directional equipment produced the ability to have a system of radiobeams that formed aerial highways. World War IIfostered the development of several new radio aids,which includes loran and radar.The development of computers and more sophisticatedradio/radar aids produced the ability to go frompoint A to point B faster and more direct than ever before.AIRBORNE NAVIGATION SYSTEMSLearning Objective: Recognize componentsand operating principles of the variousnavigational systems.Airborne navigation systems can be selfcontainedunits or ground-referenced units. Aself-contained unit is complete in itself and does notdepend upon a transmission from a ground station. Aground-referenced unit needs a transmission from aground station. Either way, they serve the samepurpose—to aid the aircrew in completing theirmission safely and efficienty.ALTITUDE AND ALTIMETERSAltitude is defined as the vertical distance of alevel, a point, or an object measured from a givensurface. Knowing the aircraft’s altitude is imperativefor terrain clearance, aircraft separation, and amultitude of operational reasons.There are as many kinds of altitudes as there arereference planes from which to measure them. Onlysix concern the navigator—indicated altitude,calibrated altitude, pressure altitude, density altitude,true altitude, and absolute altitude. There are twomain altimeters-pressure altimeter and the absolute(radar) altimeter. Every aircraft has a pressurealtimeter. For you to understand the pressurealtimeter’s principle of operation, a knowledge of thestandard datum plane is essential.Standard Datum PlaneThe standard datum plane is a theoretical planewhere the atmospheric pressure is 29.92 inches ofmercury (Hg) and the temperature is +15°C. Thestandard datum plane is the zero-elevation level of animaginary atmosphere known as the standardatmosphere. In the standard atmosphere, pressure isFigure 2-7.-Standard lapse rates.at 29.92 inches of mercury at 0 feet, and decreasesupward at the standard pressure lapse rate. Thetemperature is + 15°C at 0 feet, and decreases at thestandard temperature lapse rate (fig. 2-7).2-7
The standard atmosphere is theoretical. It wasderived by averaging the readings taken over a periodof years. The list of altitudes and their correspondingvalues of temperature and pressure given in figure 2-7were determined by these averages.INDICATED ALTITUDE.— The term indicatedaltitude means the value of altitude that is displayedon the pressure altimeter.CALIBRATED ALTITUDE.— Calibrated altitudeis indicated altitude corrected for installation/positional error.PRESSURE ALTITUDE.— The height of theaircraft above the standard datum plane is calledpressure altitude.DENSITY ALTITUDE.— Density is mass perunit volume. The density of the air varies withtemperature and with height. Warm air expands, andis less dense than cold air. Normally, the higher thepressure altitude, the less dense the air becomes. Thedensity of the air can be expressed in terms of thestandard atmosphere. Density altitude is the pressurealtitude corrected for temperature. This calculationconverts the density of the air to the standardatmospheric altitude having the same density.Density altitude is used in performance data and trueairspeed calculations.TRUE ALTITUDE.— True altitude is the actualvertical distance above mean sea level, measured infeet. It can be determined by two methods: (1) Set thelocal altimeter setting on the barometric scale of thepressure altimeter to obtain the indicated true altitude.The indicated true altitude can then be resolve to thetrue altitude by use of a DR computer. (2) Measurealtitude over water with an absolute altimeter.ABSOLUTE ALTITUDE.— The height abovethe terrain is called absolute altitude. It is computedby subtracting terrain elevation from true altitude, orit can be read directly from an absolute altimeter.cells assume a particular thickness at a given pressurelevel, and thereby position the altitude pointersaccordingly. On the face of the indicator is abarometric scale that indicates the barometricpressure (in.Hg) of the point or plane from which theinstrument is measuring altitude. If you turn thebarometric pressure set knob on the altimeter, itmanually changes the setting on the scale. It alsoresults in simultaneous movement of the pointers tothe corresponding altitude reading.Like all measurements, an altitude reading ismeaningless if the reference point is unknown. Thepressure altimeter face supplies both values. Theposition of the pointers indicate the altitude in feet,and the barometric scale indicates the pressure of thereference plane.TYPES OF PRESSURE ALTIMETERS.—There are two different types of altimeters that youwill be concerned with. They are the counter-pointeraltimeter and the counter-drum-pointer altimeter.Counter-Pointer Altimeter.— Ths altimeter hasa two-digit counter display unit located in the9 o’clock position of the dial. The counter indicatesaltitude in 1,000-foot increments from 0 to 80,000feet (fig. 2-8). A single conventional pointer indicateshundreds of feet on the fixed circular scale. Thepointer makes 1 revolution per 1,000 feet of altitude,and as it passes through the 900- to 1,000-foot area ofthe dial, the 1,000-foot counter is actuated. The shaftof the 1,000-foot counter actuates the 10,000-footcounter at each 10,000 feet of altitude change. Todetermine the indicated altitude, you read thePressure AltimeterAs stated earlier, every naval aircraft has apressure altimeter. The altitude indicated is indicatedaltitude, not absolute altitude.PRINCIPLES OF OPERATION.— The pressurealtimeter is an aneroid barometer calibrated toindicate feet of altitude instead of pressure. Thepointers are connected by a mechanical linkage to aset of aneroid cells. These aneroid cells expand orcontract with changes in barometric pressure. TheFigure 2-8.-Counter-pointer altimeter.2-8
1,000-foot counter and then add the 100-foot pointerindication.CAUTIONIt is possible to misinterpret the counterpointeraltimeter by 1,000 feet immediatelybefore or after the 1,000-foot countermoves. This error is possible because the1,000-foot counter changes when thefoot-pointer is between the 900- and1,000-foot position.Counter-Drum-Pointer Altimeter.— The onlyreal difference between this altimeter and thecounter-pointer altimeter is the addition of a 100-footdrum (fig. 2-9). This drum follows the 100-footpointer, and it is this drum that actuates the1,000-foot counter. In this way it prevents thereading error when the 1,000-foot counter switches.There are two methods of reading the indicatedpressure altitude. One way is to read thecounter-drum window without referring to the100-foot pointer. This will give a direct readout ofboth thousands and hundreds of feet. The second wayis to read the counter window and then add the100-foot pointer indication. The pointer serves as aprecise readout of values less than 100 feet.This sample altimeter has a servoed mode and apressure mode of operation. The mode of operation iscontrolled by a spring-loaded, self-centering modeswitch, placarded RESET and STBY. In the servoedmode, the altimeter displays altitude, corrected forposition error, from the synchro output of the air datacomputer. In the standby mode, the altimeter operatesas a standard altimeter. In this mode, it uses staticpressure from the static system that is uncorrected forposition error.The servoed mode is selected by placing the modeswitch to RESET for 3 seconds. The ac power mustbe on. During standby operation, a red STBY flagappears on the dial face. The altimeter automaticallyswitches to standby operation during an electricalpower loss or when the altimeter or altitude computerfails. The standby operation is selected by placing themode switch to STBY. An ac-powered internalvibrator automatically energizes in the standby modeto lessen friction in the display mechanism.PRESSURE ALTIMETER ERRORS.— Thereare five categories of errors relating to pressurealtimeters. They are the mechanical error, the scaleerror, installation/position error, reversal error, andhysteresis error.Mechanical Error.— Mechanical error is causedby misalignments in gears and levers that transmit theaneroid cell expansion and contraction to the pointersof the altimeter. This error is not constant, and it mustbe checked before each flight by the settingprocedure.Scale Error.— Scale error is caused by irregularexpansion of the aneroid cells. It is recorded on ascale correction card maintained for each altimeter inthe instrument maintenance shop.Installation/Position Error.— Installation/position error is caused by the airflow around thestatic ports. This error varies with the type of aircraft,airspeed, and altitude. The magnitude and directionof this error can be determined by referring to theperformance data section in the aircraft NATOPSmanual.An altimeter correction card is installed in someaircraft that combines the installation/position and thescale errors. This card shows the amount of correctionneeded at different altitudes and airspeeds.Reversal Error.— Reversal error is caused byinducing false static pressure into the system. Thisnormally occurs during abrupt or huge pitch changes.This error appears on the altimeter as a momentaryindication in the opposite direction.Figure 2-9.-Counter-drum-pointer altimeter.Hysteresis Error.— Hysteresis error is a lag inaltitude indication due to the elastic properties of thematerial within the altimeter. This occurs after anaircraft has maintained a constant altitude for anextended period of time and then makes a large, rapidaltitude change. After a rapid descent, altimeter2-9
eadings are higher than actual. This error isnegligible during climbs and descent at a slow rate orafter maintaining a new altitude for a short period oftime.Absolute (Radar) AltimeterAccurate absolute altitude is important fornavigation, photography, and bombing, as well as forsafe piloting. Absolute altitude can be computed fromthe pressure altimeter readings, but the results areoften inaccurate. Under changing atmosphericconditions, corrections applied to pressure altimeterreadings to obtain true altitudes are only approximate.Also, any error made in determining the terrainelevations results in a corresponding error in theabsolute altitude.The radar altimeter, AN/APN-194(V), is a pulsed,range-tracking radar that measures the surface ofterrain clearance below the aircraft. It is reliable inthe altitude range of 20 to 5,000 feet. This altimeterdevelops its information by radiating a short durationradio frequency (RF) pulse from a transmit antennaand measuring the time interval it takes to receive thereflected signal. The altitude information is thencontinuously sent to the indicator in feet of altitude.The height indicator is disabled when the aircraft isabove 5,000 feet. When the aircraft is on the ground,the system is disabled by the weight-on-wheelsswitch.HEIGHT INDICATOR.— The AN/APN-194(V)uses the ID-1760A/APN-194(V) as its heightindicator (fig. 2-10, view A). The only operatingcontrol is in the lower left-hand corner. This controlknob is a combination power switch, self-test switch,and a positioning control for low altitude limit index(limit bug). The adjustable limit bug is set to adesired altitude for use as a reference for flying at afixed altitude. The indicator displays the altitude on asingle-turn dial that is calibrated from 0 to 5,000 feet.If the aircraft is above 5,000 feet, or the signalbecomes unreliable, the OFF flag appears and thepointer goes behind the dial mask.If you rotate the control knob clockwise, it willapply power to the system. If you continue to rotatethe knob, it will set the limit bug to the desiredreference altitude. While the aircraft is in the air, youcan close the self-test switch by pressing the controlknob. When this occurs, the indicator will read 100±10 feet. This self-test will not work on the groundFigure 2-10.-AN/APN-194(V) components. A. ID-1760A/APN-194(V). B. RT-1042/APN-194 (V), MX-9132A/APN-194(V). C. BZ-157A.2-10
ecause the system is disabled by the weighton-wheelsswitch.RECEIVER-TRANSMITTER.— This systemuses the RT-1042/APN-194(V) as its receivertransmitter(fig. 2-10, view B). It is an airtight unitthat contains all the electronic components for thegeneration, detection, and time differencecomputations of the radar pulses.There are two altitude modes of operation-onefor low level and one for high level. The low-levelmode is for altitudes less than 1,000 feet. In thismode, the RT transmits a very narrow, low-poweredpulse to get maximum range resolution. Thehigh-level mode is for altitudes above 1,000 feet. Inthis mode, the output pulse is a wider, high-poweredpulse, which ensures sufficient ground return energyfor tracking.There are two ranging modes of operation—onefor search and one for tracking. In the search mode,the system successively examines increments ofrange with each cycle of operation until the completealtitude range is searched for ground return. Whenthe range is found, the system switches to the trackmode. In the track mode, the system locks onto andtracks the leading edges of the ground return pulses.It then sends continuous altitude information to theindicator.In most aircraft with this system, there is anInterference Blanker, MX-9132A/APN-194(V),located next to the RT (fig. 2-10, view B). Thisblanker attenuates any RF from direct antennaleakage and provides isolation of the receiver fromthe transmit antenna.LOW ALTITUDE AUDIBLE ALARM.— Someof the aircraft with the APN-194(V) system have theBZ-157A low altitude audible alarm installed (fig.2-10, view C). In the EA-6A aircraft, this box is onthe ICS relay box behind the EWO’s seat. This alarmwill apply a tone to the intercommunication systemwhen the aircraft falls below the altitude that the limitbug is set. The tone is a 2-second tone alternatingbetween 700 and 1700 Hz at 2-Hz intervals. Thisalarm will also sound when there is an unreliablecondition in the system. This tone alternates between700 and 1700 Hz at 8-Hz intervals. The alarm willalso send a signal to the indicator to cause the OFFflag to appear. The unreliable condition warningsignal takes precedence over the low altitude warningsignal.The BZ-157A has three switches on it. The firstone is the volume control, which controls the volumeof the alarm. The other two are press-to-test switches.Depressing the LOW ALT switch will cause the alarmto be heard. Depressing the UNREL switch willcause the alarm to be heard and the OFF flag toappear.LOW ALTITUDE WARNING LIGHT.— Thelow altitude warning light is mounted on the pilot’sinstrument panel. This light will illuminate wheneverthe aircraft falls below the altitude that the limit bug isset.RADAR ALTIMETER WARNING SETThe radar altimeter warning set (RAWS) works inconjunction with the radar altimeter systems that donot have the BZ-157A alarm unit. The P3-C aircraftuses the AN/APQ-107 system. This system providesthe pilot and copilot with warning signals wheneverany of the following conditions exists:. Aircraft flies below preselected altitudes.. Input power to radar altimeter fails.. RAWS warning circuit indicates unreliability.When the aircraft descends to 380 (±20) feet(high-altitude index), the radar altimeter signal toRAWS is interrupted. This causes the AUTOPILOT/RADAR ALTM warning lights to flash and a 1-kHzinterrupted tone to be heard over the ICS. Bothsignals occur at a rate of two pulses-per-second for a3-second duration. This also happens as the aircraftdescends through 170 feet (low-altitude index). Thewarnings will continue as long as the aircraft remainsbelow the low index. When the nosegear is down orthe flaps are in the approach, takeoff, or landingposition, the warning signals are disabled.If the radar altimeter receiver signal is too weak toprovide reliable altitude information or the altimetermalfunctions, the RAWS will give both warnings.This occurs unless the signals are disabled by thenosegear or flap position.There are two RAWS press-to-test switcheslocated in the aircraft. One on the RAWS itself, andone on the forward load center. If you depress theswitch on the RAWS, it will actuate both signals,unless the nosewheel is down and locked-then onlythe aural warning occurs. Depressing the switch onthe forward load center results in both the visual andthe aural warnings.2-11
The barometric switch in the RAWS automaticallyresets its altitude reference pressure toground level before flight. When 700 feet abovetakeoff altitude has been reached, the switch actuatesand changes the RAWS reliability circuit. At thispoint, the radar altimeter reliability signal is inhibited.This prevents nuisance warnings when the aircraft isflying above the operating range of the switch.AUTOMATIC DIRECTION FINDER (ADF)The Direction Finder Set, AN/ARN-83, is knownas a low frequency automatic direction finder(LF/ADF). This system is a radio navigational aidthat operates in the low-to-medium-frequency range.It continuously indicates the bearing to a selectedradio station, acts as a manual direction finder, and asa conventional low-frequency radio receiver for voiceand unmodulated transmissions. The LF/ADF issometimes referred to as a radio compass.Major ComponentsThe AN/ARN-83 direction finder set consists offour major components. The y are the R-1391/ARN-83 receiver, the C-6899/ARN-83 control panel,the AS-1863/ARN-83 loop antenna, and the ADFsense antenna.RADIO RECEIVER R-1391/ARN-83.— Theradio receiver is remotely controlled from the ADFcontrol. It does all processing of signals received bythe loop and sense antennae and sends bearinginformation to the navigation indicator group.DIRECTION FINDER CONTROL PANELC-6899/ARN-83.— The control panel controls allfunctions of the system (fig. 2-11). Selection of thethree modes of operation is accomplished here.Manual control of the loop antenna is done using theLOOP knob. The tune knob tunes the receiver for theFigure 2-11-Direction finder control panel C-6889/ARN-83.station, and it is visually indicated through thefrequency dial. The tuning meter indicates thestrength of the receiver signal. The BFO switchcauses a tone to be produced for tuning purposes.LOOP ANTENNA AS-1863/ARN-83.— Thisantenna is a flat, one-piece, sealed unit. It consists offour ferrite-cored coils arranged in a rectangle. Twocoils line up parallel to the fore-aft axis of the aircraft,and the other two are perpendicular to the axis. Eachpair of coils provides a signal that is sent to thereceiver for processing.ADF SENSE ANTENNA.— The ADF senseantenna element is basically an aluminum panelconnected to the input of the lightning arrester. Thispanel is encased in fiber glass and mounted flush withthe fuselage. The loop antenna is physically mountedon the sense antenna.Functional DescriptionThere are three functional modes with theLF/ADF. These modes are (1) ADF mode, (2) loopmode, and (3) antenna mode. The direction finder setprovides audio to the intercommunication system inall three modes of operation.ADF MODE.— In the ADF mode, the loopantenna signals are mixed with the nondirectionalsense antenna signal in the receiver. This signal isthen detected for audio to be sent to the headsets. Thebearing coordinate data is produced by the receivererror correction servomotor network. This is thensent to the navigation indicator for display.LOOP MODE.— In the loop mode, the fixed loopantenna RF signal is modulated and detected in thereceiver. The resulting audio error signal is used toproduce an audio tone signal that is fed to theintercommunication system. The servomotornet work is then manually controlled to null the audiotone. At the null, the output of the receiver willrepresent relative bearing to the radio station.ANTENNA MODE.— This mode causes thesystem to act just like a normal radio receiver. Itreceives a voice or continuous wave (CW) signal atthe sense antenna, which is detected and amplified bythe receiver. The receiver then sends the audio to theICS. In this mode of operation, there is no bearingdata signal being developed.2-12
TACTICAL AIR NAVIGATION (TACAN)The TACAN Set, AN/ARN-84(V), is a radionavigational set that operates in conjunction with aTACAN ground station. Together they provide theaircrew with continuous bearing and range from theaircraft to the station. The TACAN set can alsooperate as both the interrogator and transponder withanother aircraft equipped with TACAN.The ground station, acting as a reference position,develops a complex signal on which bearinginformation is superimposed (fig. 2-12). This signalmay be on any of 126 channel frequencies in the Xmode. Pulse coding gives ground equipment thecapability of an additional 126 channels in the Ymode. Channels are separated at 1-MHz intervals inthese modes. The station identifies itself bytransmitting its call letters, in Morse code, every 37.2seconds. Knowing the time that has elapsed betweenthe interrogation signal and the reply signal facilitatescalculation of slant range from the aircraft to thestation.Figure 2-12.-Typical TACAN station bearing antenna and radiation pattern.2-13
Major ComponentsThe AN/ARN-84(V) TACAN set consists of fivemajor components. They are the control panel,C-9054/ARN-84(V); the receiver-transmitter,RT-1022/ARN-84(V); the signal data converter,CV-2837/ARN-84(V); the RF transmission lineswitch, SA-1818/A; and the antenna assembly,AS-26281A.TACAN CONTROL C-9054/ARN-84(V).— TheTACAN control box (fig. 2-13) contains the controlsto turn the system on and off, to make mode andchannel selections, to control identity tone volume,and to initiate self-test. The control panel includes theGO and NO-GO indicators for the self-test.RECEIVER-TRANSMITTER RT-1022/ARN-84(V).— The RT (fig. 2-14) consists of 10removable modules mounted on a chassis assembly.The front panel contains a spare fuse, temperaturegauge, elapse time meter, built-in test (BIT)indicators, and a BIT switch. The front panel alsocontains the antenna connector jack and a blowermotor.The RT transmits and receives the pulsed RFsignals. It detects, decodes, and demodulates thesignals after reception. Bearing and slant-rangeinformation is computed in the RT along withprocessing of the beacon identification signals. Whenthe self-test switch is pressed on the control box, theRT processes the test signals.SIGNAL DATA CONVERTER CV-2837/ARN-84(V).— The signal data converter (fig. 2-14) ismounted to the back of the RT. There is an elapsetime meter on the left side of the converter. Thisconverter electrically connects the mount and the RT.Figure 2-14.-TACAN receiver transmitter and signal dataconverter.The signal data converter contains the range andbearing couplers, an interface, and a buffer. This boxsends the range and bearing data to the indicatorgroup to be displayed on the indicator. The bufferregulates the power for the system and acts as aninterface between the RT and the mount. Theinterface network enables the range, bearing,operating mode, channel number, data link, anddigital data to be transferred to the indicator group.RF TRANSMISSION LINE SWITCHSA-1818/A.— This switch is an auxiliary unit of thesystem. It enables the TACAN set to select theantenna receiving the strongest signal.ANTENNA ASSEMBLY AS-2628/A.— TheUHF L-band blade antennae house the antennaelements used by the TACAN antenna system. Theseantennae are used by both the TACAN and the UHFcommunication sets.OperationOnly three of the operating modes will bediscussed here. They are the receive, transmit/receive, and air-to-air modes. The fourth mode,beacon, is not used in most aircraft.Figure 2-13.-TACAN control panel C-9054/ARN-84(V).RECEIVE MODE.— In the receive mode, thesystem will provide bearing and station identity only.The transmitter is disabled to ensure that radio silence2-14
is assured. The TACAN set receives coded AM RFpulse pairs from the ground station. It then detects,decodes, and demodulates the signal to extract thebearing and identity signals. The bearing signal isthen sent to the indicator group, and the identity signalis sent to the ICS group.TRANSMIT RECEIVE MODE.— In the T/Rmode, the system provides range and bearing to theground station and station identity information. Tomeasure the slant-range to the ground station, theTACAN transmits an interrogation signal to thestation. The station then sends a reply signal, which isdetected and decoded by the TACAN set. The rangeis computed by measuring the elapsed time betweentransmission of the interrogation pulse and thereception of the reply. The range and bearinginformation is then sent to the indicator group, and thestation identification signal is sent to the ICS group.AIR-TO-AIR MODE.— The TACAN set is usedto measure range between two or more similarlyequipped aircraft in the air-to-air mode. Toaccomplish this, each TACAN set transmitsinterrogation pulses, receives interrogation pulsesfrom other TACAN sets, and transmits a reply pulsewhen interrogated. Interrogation signals consist of acoded pulse pair, and the reply is a single pulse. Thesystem will measure the elapsed time between thetransmitted interrogation and the reply received tocompute range. When using this mode, one aircraftmust use a channel that is either 63 channels higher orlower than the other aircraft.Self-TestThere are two types of self-test used by theTACAN system. They are the readiness monitoringand the interruptive self-test.READINESS MONITORING.— Readinessmonitoring is continuously ongoing self-test. Theself-test module is monitoring critical systemperformance parameters without interrupting systemoperation. If any one of the continuously monitoredparameters degrades beyond limits, a NO-GOindicator will light on the control panel, as well as onthe RT faceplate. When the power supply reaches+ 125°C (±5°C), the self-test module will light theTEMP indicator on the RT faceplate.INTERRUPTIVE SELF-TEST.— This self-testis initiated by the operator depressing either of theBIT switches on the control panel or the RT. The testcan be performed on any of the channels or in any ofthe modes of operation. If there are no faults found,range will display 1.8 nautical miles, bearing willdisplay 4 degrees, and the GO indication will bedisplayed for 9 seconds on the TACAN control panel.If there is a fault, the NO-GO indicators will light inthe same manner as in readiness monitoring.LONG RANGE NAVIGATION (LORAN)The name loran is an appropriate description ofthe hyperbolic system of electronic navigation. Itprovides lines of position over the surface of theearth. Over water, usable loran signals can bereceived at ranges up to 2,800 miles. This is donewith low-frequency radio waves. At these operatingfrequencies, radio waves are capable of following thecurvature of the earth.Loran lines of position can be crossed with eachother, or with lines of positions determined by othermeans, to provide fixes. Loran lines are stationarywith respect to the earth’s surface. Their determinationis not dependent upon compass orchronometer, and it is not necessary to break radiosilence to obtain them. Loran signals are available forreception in all types of weather, except during verysevere electrical storms.For more information on the theory of operationof loran, refer to <strong>Aviation</strong> <strong>Electronics</strong> <strong>Technician</strong> 2(Organizational), NAVEDTRA 12330, chapter 3.Major ComponentsThe AN/ARN-81 loran receiving set consists ofthree major components. They are the R-1336/ARN-81 receiver, the IP-796/ARN-81 displayindicator, and the C-6604/ARN-81 control indicator.The receiver processes the input signals androutes them to the display. The display provides ameans to align the pulses to determine the aircraftposition. The control indicator provides selection ofpower, operating modes and channels, and delaytimes.System FunctionsThe loran receives signals through the ADF senseantenna. The signals are routed from this antenna tothe R-1336/ARN-81 receiver. At the receiver, thesignals are amplified, heterodyned, and detected toprovide video output signals, which are applied to thevideo amplifier. This signal is then applied to ahigh-gain amplifier that supplies two outputs. One of2-15
the outputs is used for the automatic frequencycontrol (AFC) circuits. The other output is routed tothe summing network, which provides a compositevideo output to the display indicator.The display indicator displays the video on theCRT. The operator can then set the position byaligning the master and slave pulses and reading thetime delay. This information is then plotted on a chartto determine aircraft position.Loran-D uses the same theory of operation,but itis used in conjunction with the navigational computer.With this system, the indicator automatically displaysthe latitude and longitude of the aircraft. The operatorjust has to plot this information on a chart todetermine position.OMEGAThe omega navigation system is an outgrowth ofthe loran A and loran C systems. It is a worldwidenetwork of eight transmitting stations that provide ameans of navigation accurate to within 4 nauticalmiles anywhere in the world.Theory of OperationThe AN/ARN-99(V) omega navigation setprovides digital data representative of aircraft phasedisplacement to any combination of eight selectedomega ground stations. These eight ground stationsbroadcast 10 kW in the VLF band at 10.2 kHz, 11.3kHz, and 13.6 kHz. These stations are strategicallypositioned around the world so their combinedpropagation will cover the entire surface of the earth.Each station transmits burst of the three differentfrequencies during a 10-second period, which aremultiplexed so that only one station is on at one timeon one frequency. All signals are transmitted startingat zero time (omega time), and maintained at the exactstarting time by using atomic clocks at each station.The omega system in an aircraft must synchronizeitself to this pattern. Synchronization is done byanalyzing all the signals received in the 10.2-kHzfrequency over one 10-second period. This period isbroken up into 100 intervals of 0.1 second each. Thebeginning of each of these 0.1-second intervals is thenconsidered a possible starting point. The signal levelsare averaged over small intervals during theremaining 9.9 seconds of the pattern for each of the100 intervals, and then all are compared with thepredicted levels.Only one start time fits into the predicted pattern.When this start time is found, the omega systemknows where each frequency is originating fromduring each burst. It can then make the propermeasurements from each station. If the system cannotsynchronize at 10.2 kHz, it will try to synchronize at11.3 kHz and then at 13.6 kHz.The omega system uses the great circle distancesto all stations. This is done to ensure that the effectsof modal interference (interference between theprimary wave and the sky wave and/or ground wave)and wrong way propagation do not bias themeasurements. The stations less than 600 or morethan 7,200 nautical miles from the aircraft are notused for the measurements. They are deselected andtheir strength readings indicate zero. Station rangeand bearings are recomputed every 10 seconds in theburst filter routine, and station selection/reselectionscorrespondingly made.The omega system can use either the hyperbolicor the circular (RHO-RHO) method to process thisdata. The P-3C uses the circular measurementprocess, which measures phase from each stationdirectly. With RHO-RHO processing, a line ofposition is generated from each station by directmeasurement of the omega signal received from thatstation. Using another station and again generatinganother line of position, the position fix is found. Theadvantage of this method is that only two stations arerequired to establish a geographical fix. Thedisadvantage of this method is its need to establish theoscillator error of its receiver before the omegasignals can be used.Since circular processing measures phasedirectly, it must subtract oscillator error from themeasurement to be accurate. The RHO-RHO methoduses a software routine based on many measurementsto solve for this error. The omega on the P-3C istotally dependent on the central computer foroperation. There are no operating controls orindicators other than the elapsed time meter and thepower control panel.ComponentsThe AN/ARN-99(V) consists of three majorcomponents. These components are a control panel,an antenna coupler, and a receiver-converter.OMEGA POWER CONTROL PANEL.— The960767 omega power control panel (fig. 2-15)controls the power to the omega system. When2-16
switched on, it supplies 115 volts ac and 28 volts dc tothe omega receiver.ANTENNA COUPLER.— The AS-2623/ARN-99(V) antenna coupler has two loop antennasmounted at 90-degree angles to each other and at45-degree angles to the aircraft centerline. Theseantennae are directional, and the proper antennaselection is based upon location to the station beingreceived, relative to the heading to the aircraft. Oneof the four antenna lobes is selected (A+, B+, A-, orB-) to give the receiver-converter the maximumsignal strength from the desired omega groundstation. Once the omega has been synchronized, theantenna selection process is automatically controlledby the central computer.RECEIVER-CONVERTER.— The OR-90/ARN-99(V) receiver-converter consists of fivesections. These sections are the receiver section,correlator and digital converter section, computercommunication section, discrete storage section, andthe power supply section.Receiver Section.— The receiver section consistsof the antenna switching matrices, RF amplifiers, IFamplifiers, and a precision frequency generator.The antenna switching matrices sum and phaseshift the incoming signals to provide an antennaconfiguration that will be best oriented to a specificomega station. These circuits also enables test signalsto be injected into the omega system. There are threeof these matrices in this section, one for each of theoperating frequencies.The RF amplifiers remove the IF image andprovide attenuation to remove signals far from theoperating frequency. There are three of these circuits,one for each frequency, with the only differencebetween them being the tuning of the bandpass filtersand the notch filters. The heterodyne mixers areidentical for all three.The local oscillator frequencies produce a 1.33kHz IF signal. Each frequency used has its own IFamplifier circuit; these circuits are identical for allFigure 2-15.-Omega power control panel.three frequencies. The limiters in the circuit controlthe dynamic signal level in the amplifier, preventingsaturation of the linear filters.The precision frequency generator generates theprecision frequency signals required for operation ofthe system. The generator consists of a 10.608 MHzcrystal oscillator and counters. The counters dividethe oscillator frequencies to provide a 13.6 kHz RFtest signal, a 1.133 kHz IF reference signal, a 14.733kHz local oscillator signal, a 176.8 kHz receivercomputerinput/output clock signal, a 11.333 kHz RFtest and local oscillator signal, and a 10.2 kHz RF testand local oscillator signal.Correlator and Digital Converter Section.—This section converts the phase of the IF signals intodigital form. The three channels use identical phaseconverters. The phase of the IF signal is thenavigation information needed by the centralcomputer.Computer Communication Section.— Thereceiver-converter operation is computer controlledand cannot be operated manually. This sectionprovides a means of communication between thereceiver-converter and the central computer. Thissection receives data requests from the computer andsends the desired data to the computer.Discrete Storage Section.— This sectionprovides a means of storing and controlling antennaswitching and test signal gating commands from thecentral computer for use in the receiver-converter.The discrete storage consist of control line drivers anda decoder circuit. It acts as an interface between thecommunication section and the receiver sections.Power Supply Section.— The power supplygenerates regulated and unregulated dc voltages forthe system. The power supply also provides forshort-circuit protection and for overvoltageprotection. The short-circuit protection is for thethree regulators, (+16, +5, and -16 Vdc regulators). Ashort in any of these will cause the regulator to beclamped to ground, and the power supply will need tobe reset. The overvoltage protection is for the +5 Vdccircuit. When the output of the +5 Vdc exceeds thebreakdown voltage of the Zener, a relay is energizedthat removes the input power. When this occurs,system power needs to be cycled to reset theprotection circuits.2-17
DOPPLERIn the following text we will discuss theAN/APN-153(V) navigation set. For more informationon the basics of the Doppler theory, refer to<strong>Aviation</strong> <strong>Electronics</strong> <strong>Technician</strong> 2 (Organizational),NAVEDTRA 12330.The AN/APN-153(V) navigation set is aself-contained, airborne, pulsed Doppler radarsystem. It is designed to provide navigation data tothe navigation computers onboard various aircraft.This system automatically and continuously providesground speed and drift angle information to thecomputer. This information is then used for the deadreckoning of the aircraft without the aid of windestimates or true airspeed.The system operates without the use of groundinstallations over an unlimited geographical range.Weather does not affect the system performance. Thenavigation set is accurate from 40 feet to 50,000 feetover land and water that has a sea state of 1 or greater.Ground speed is accurate from 80 to 800 knots, withthe drift being accurate to 40 degree right or left. Thissystem is difficult to jam because of the directivityand narrow width of the microwave beamtransmission and the variation of PRF.Theory of OperationThe Doppler system determines the ground speedand drift angle components by measuring thefrequency shift in received echoes. In other words,the system beams signals to the ground, receives thereturn echoes, and then measures the frequency shiftproduced by the relative motion between the aircraftand the earth. Since the aircraft moves both along itslength and across its length, more than one beam isrequired. The AN/APN-153(V) uses four. These fourbeams strike the ground at the corners of a rectangle.The system is pulsed so that only two beams(diagonally opposite) are transmitted or received at atime. Of these, aircraft motion shifts the forwardbeam up in frequency and the rearward down infrequency. These two shifts are compared, and adifference signal for the pair is formed. Then theother two beams are used. The two difference signalsare then compared, and an azimuth motor rotates theantenna to make and keep them equal. This keeps theantenna aligned with the ground track. Since the driftangle is derived directly from antenna position, driftangle accuracy is not affected by signal quality,terrain, or sea state, as long as any echo at all isreceived. Once the antenna is aligned with the groundtrack the measured frequency shift is used to deriveground speed. The drift angle and the ground speedinformation is then sent to the navigation computer asinputs for dead reckoning navigation.Major ComponentsThere are three major components in theAN/APN-153(V) system. They are the Receiver-Transmitter RT-680A/APN-153(V), AntennaAS-1350/APN-153(V), and the Control IndicatorC-4418A/APN-153(V).RECEIVER-TRANSMITTER.— The RT-680A/APN-153(V) contains the transmitter, receiver, andthe frequency tracker circuits (fig. 2-16, view A). It isessentially a conventional radar system that uses amagnetron power oscillator whose PRF is varied by asawtooth voltage. The receiver is a superheterodynereceiver, where the two signals are amplified, mixed,and detected. The resultant detector signal is a singleaudio signal. This audio signal is then filtered,amplified, and sent to the frequency tracking circuits.Here, the signal is mixed with the output frequencygenerator in the main tracking loop. Any differencebetween the two is amplified and phase detected. Theresulting voltage is fed to the frequency generator,which makes its frequency equal to the receivedaudio. The received audio is a function of theDoppler shift, and, therefore, is the ground speed.ANTENNA.— The AS-1350/APN-153(V)contains the microwave plumbing, pitch and rollrotary couplers, antenna arrays, and the pitch and rollservo networks that maintain the arrays in levelposition during aircraft motion (fig. 2-16, view B).The antenna pitch and roll data used for leveling areobtained from the course attitude data transmittergroup of the aircraft.The antenna takes the RF pulses from the RT andradiates them in two patterns emitted alternately athalf-second intervals. It then receives the returnechoes and feeds them to the RT. The antenna alsotakes the signal from the detector in the main trackingloop to position the antenna arrays parallel to theaircraft’s ground track. The array position, whichnow represents aircraft drift angle, is fed to a servofollow-up in the control panel.CONTROL INDICATOR.— The C-4418A/APN-153(V) contains the controls and indicatorsrequired for system operation (fig. 2-16, view C).The control indicator applies system power, selects2-18
the mode of operation, indicates ground speed anddrift angle, and indicates when the system is in thesearch mode.The signal representing drift angle from theantenna is fed to the servo follow-up in the indicatorand positions the DRIFT angle dial to the correct driftangle. The RT develops a voltage proportional to thefrequency of the frequency generator, which is thenfed to a servomotor in the indicator. This servomotorpositions the GND SPEED dial to indicate the groundspeed. The mode switch should be set to the LANDposition when the aircraft is overland, and to the SEAposition when over the sea.With the mode switch in the TEST position, youshould get the following indications after a 1-minutedelay:lllMEMORY light is off.GND SPEED dial indicates 121±5 knots.DRIFT angle dial indicates 0±2°.The memory light indicates that the audio fromboth radiated patterns is lost. This means that thesystem cannot provide accurate information. The twoindicators will be locked at the present readings untilthe RT starts to receive good signals.REVIEW QUESTIONSFigure 2-16.-AN/APN-153(V) components.APN-153(V). B. AS-1350/APN-153(V).APN-153(V).A. RT-680A/C. C-4418A/Q1.Q2.Q3.Q4.Q5.Q6.Q7.Q8.Q9.Q10.Q11.What is the definition of direction?What is the difference in miles between thehighest and lowest points of the earth's crust ?What are the imaginary reference lines usedto locate points on the earth called?What is the definition of absolute altitude?In the counter-pointer display, how manyrevolutions does the pointer make per 1,000feet of altitude?What is the reliable altitude range for theAN/APN-194(V) radar altimeter?How is the barometric switch in the RAWSsystem reset prior to flight?What are the operating modes of the ADFsystem?What TACAN operating mode ensures thatradio silence is maintained?What are the three operating frequencies usedin the omega system?What are the two pieces of data informationprovided by the AN/APN-153(V) Dopplersystem?2-19
CHAPTER 3RADARAs an avionics supervisor, you must beknowledgeable of the operation principles of variouscomplex search radars, fire control radars, IFF sets,and the associated peripheral equipment. Chapter 2of <strong>Aviation</strong> <strong>Electronics</strong> <strong>Technician</strong> 2 (Organizational),NAVEDTRA 12330, explains the basics ofradar. This chapter discusses the search radar foundon the P-3C aircraft, the fire control training device11D13A, and the IFF system found on the S-3aircraft. The peripheral equipment, such as thetactical displays, computers, and navigationalsystems, are discussed in other chapters of thisTRAMAN. (See table of contents.)SEARCH RADAR SYSTEMLearning Objective: Recognize components,operating principles, and characteristics of atypical search radar system.The AN/APS-115B radar set used in the P-3Caircraft is an airborne, X-band search radar system. Itprovides detection and surveillance of submarinesoperating under snorkel conditions, surface vessels,and aircraft. It is made up of two radar receivertransmitters,two antennas, two radar controls, anantenna control, an antenna position programmer, anantenna parking control, an antenna scan control, anda radar interface unit. The receiver-transmitters areselective, long and short pulse-type radar receivertransmitters.The antennas are located in the nose andthe aft of the aircraft, providing 360-degree azimuthcoverage. Radar search scan and data pickup areperformed independently by each radar set.The antenna position programmer (APP)combines video information from both radar sets.The APP then sends this information to the radarinterface unit (RIU), which sends it to the sensor datadisplay (SDD) for display.The two antennas are tilt-stabilized byservomechanisms, receiving pitch and roll data fromthe central repeater system (CRS). The tilt of theantenna can move from 20 degrees down to 10degrees up, referenced to the horizontal. Antennascan is selectable to either full (360 degrees) or sector(45-degree scan about a selected heading). With onlyone antenna system, the scan can be no more than 240degrees in azimuth. Either antenna may be stopped tosearchlight a specific area. With both antennas in fullscan, the crossover points are at 90 and 270 degreesrelative to aircraft heading. In sector scan, crossoverpoints are at 120 and 300 degrees when the antennasare rotating in a clockwise direction. The crossoverpoints are 60 and 240 degrees when they are rotatingin a counterclockwise direction (fig. 3-1).The nonacoustic sensor operator station displaysthe search radar information. The displaypresentation is true north or aircraft headingstabilized, with a computer-generated symboldepicting aircraft true course. The nonacousticoperator station contains the radar systems operatingcontrols.AN/APS-115B MAJOR COMPONENTSThe APS-115B search radar system includes thefollowing equipment:l C-7511A/APS-115 radar antenna control panell MX-7930/APS-115 antenna position programmer. RT-889/APS-115 receiver-transmitter. AS-2146/APS-115 antennal A361 antenna elevation parking controll C-7512/APS-115 radar control panell C-7557/ASA-69 radar scan converter control. MX-7974/ASA-69 radar interface unit3-1
Figure 3-1.-Azimuth scan coverage.C-7511A/APS-115 Radar Antenna ControlPanelThe C-7511A/APS-115 (fig. 3-2) controls both ofthe radar antennas. There are six controls available tothe operator for getting the presentation desired.TILT KNOB.— This knob gives the operator theability to vary the tilt of the antenna manually. Therange of manual tilt is from +10 degrees to –20degrees from aircraft horizontal.the antenna scan to be 360 degrees during dual systemoperation. The antenna scan will be 240 degreesduring single system operation. In the SECTOR position,the antennas will scan 45 (±4) degree sectors.This sector will center around the position establishedby the ANT HEADING control. With STOP selected,NORTH STAB/HEADING STAB PUSHBUTTON.— With NORTH STAB selected (illuminatedamber), the presentation displayed will be northstabilized. 000° displayed will be true north. WithHEADING STAB selected (illuminated amber), thepresentation will be heading stabilized. 000°displayed will be aircraft heading. Pressing the pushbutton will alternately select NORTH or HEADING.STAB/OUT SWITCH.— With STAB selected,the antennas will automatically correct for aircraftpitch and roll attitude changes. Mechanical limit forantenna stabilization is ±30 degrees, with respect tothe aircraft. With OUT selected, the antennastabilization is disabled.SCAN SWITCH.— There are three selectionspossible to the operator. The FULL selection causesFigure 3-2.-C-7511A/APS-115 radar antenna control panel.3-2
the antennas will stop at the position established bythe ANT HEADING control.ANT HEADING KNOB.— This knob providescontrol to change the heading of the antenna if theSCAN switch is in the SECTOR or STOP position.TILT ALIGN ADJUSTMENT SCREW.— Thiscontrol is located on the right side of the control box.It provides a limited amount of adjustment to align thetilt axis of the aft antenna to the tilt axis of the forwardantenna due to boresight errors.MX-7930/APS-l15 Antenna PositionProgrammer (APP)The antenna position programmer (fig. 3-3) tiesthe forward and aft systems together. It generates theazimuth and tilt drive signals for the antenna drivemotors. The APP also generates timing andsynchronization signals for the receiver-transmitters,radar interface unit (RIU), and IFF. It combines theforward and aft video returns into composite signalsfor full 360-degree coverage. The APP containsself-test circuits for automatic fault detection andisolation, along with logic circuits for proper radarfunctions (pulsewidth, PRF, scan speed, and so forth).On the face of the AFP, there are several operatingdevices. These are the circuit breakers, fault isolationmeter, fault isolation switch, and an elapsed timemeter.CIRCUIT BREAKERS.— There are ninebreakers on the APP. Three are for applying power tothe forward system, three for applying power to theaft system, and three for applying power to the APPitself. Each circuit breaker applies one phase of115 volts ac to its appropriate place.FAULT ISOLATION METER.— The faultisolation meter provides GO/NO-GO indications ofthe BITE signals selected by the fault isolationswitch.FAULT ISOLATION SWITCH.— The faultisolation switch enables the technician to select thedesired BITE signal for display on the fault isolationmeter. This allows the technician to performmaintenance on the radar systems. Ensure that thisswitch is positioned to OFF for normal mode ofoperation.WARNINGRotation of the fault isolation switch willoverride radome safety interlock switches,possibly causing personnel injury.CAUTIONRotate fault isolation switch on the antennaposition programmer clockwise only.Equipment damage may otherwise result.RT-889/APS-115 Receiver-TransmitterThe receiver-transmitter generates the highenergy RF radar transmission pulses, and receives thereflected target pulses. A pressurized waveguidesystem connects each RT to its respective antenna.Each RT is controlled by its own control box throughthe APP.Figure 3-3.—MX-7930/APS-115 antenna positionprogrammer.There are four major functional subsections ineach receiver-transmitter. These subsections are thetransmitter, the receiver, the waveguide pressurizationsystem, and the BITE circuitry.3-3
The transmitter contains a high-voltage powersupply, modulator control circuitry, the modulator,and the magnetron RF output stage. Output pulsesand transmitter output frequencies are generated inthe transmitter. The magnetron output RF iswaveguide coupled to the antenna for propagation.The transmitter consists of the necessarycomponents to accept the synchronization signalsfrom the APP and generate an output pulse. Thispulse is then fed into the waveguide system andradiated out of the antenna. The transmitter system isconventional except for the frequency agile magnetron.The magnetron is mechanically modulated at75 Hz to vary the output pulse frequency over a60 MHz (nominal) range. This is accomplished witha motor-driven tuner that physically changes theinterior characteristics of the magnetron. This agilityenhances the clutter elimination capabilities of thesystem, and it is an option available to the operator.The basic transmitter characteristics are asfollows:Frequency:Peak Power:PRF:8.5 to 9.6 GHz, manually tunable143 kW minimum1600 Hz, line locked with0.5 microsecond pulsewidth(short pulse)them to the APP for subsequent distribution anddisplay. A solid-state, frequency-agile AFC systemallows continuous tuning of the receiver localoscillator to track the transmitter and provide a60-MHz IF amplifier input. The receiver agilemodulator-demodulator generates the synchronization,which locks the transmitter and the receiverAFC together.The waveguide pressurization system consists ofan air pump and a replaceable, air-drying desiccantcartridge. The pump furnishes dry pressurized air forthe waveguides between the RT and the antenna. Thispressurized air prevents arcing in the waveguide whenthe aircraft is flying at high altitudes.The BITE circuits perform continuous monitoringof vital functions within the RT. The fault isolationmeter and switch provide a means of monitoringselected functions to aid the technician in the removaland replacement of faulty components.Figure 3-4 shows the controls on theRT-889/APS-115. There is a fault isolation switchand meter for checking the operation of thereceiver-transmitter. The AFC section allows theoperator to select the AFC required. There is also anelapsed time meter and two power reset circuitbreakers.Agility:60 MHz nominal, 40 MHzminimumCAUTIONThe receiver system includes an AFC-controlledlocal oscillator, IF amplifiers, video detecting andprocessing circuits, range mark generating circuit,and BITE circuitry. The receiver processes receivedecho pulses, converts them to video, and deliversReturn fault isolation switch to the OFFposition during normal operation. Failureto do so will result in improper operation ofthe system.Figure 3-4.-RT-889/APS-115 receiver-transmitter control panel.3-4
AS-2146/APS-115 AntennaThe radar antenna radiates the transmitter pulsesin either a pencil beam mode or a cosecant squared(spoiled) beam mode. The mode of radiation is notoperator selectable. A spoiler must be physicallyadded to the antenna dish if the spoiled beamoperation is required. This spoiler causes the beam tobe a wide vertical beam.The basic characteristics of the antenna are asfollows:Scan speed:Radiation pattern:Scan modes:Manual tilt:6 RPM with 2.5 microsecondpulsewidth or 12 RPM with0.5 microsecond pulsewidthPencil beam 2.5 by3.8 degrees; spoiled beam2.5 by 20 degrees45-degree sector, 360-degreefull scan, 240-degree sector(single system operation)+10 to –20 degreesFREQ PUSH BUITON.— This push button hastwo positions. With FIXED selected, the system willbe in the fixed frequency mode of operation. WithAGILE selected, the system will be operating in thesweep frequency mode. This mode is used in highclutter areas to improve target definition.PULSE PUSH BUTTON.-— The operator usesthis button to select either LONG or SHORTpulsewidths for the system. In the LONG mode, thesystem has a 2.5 µsecond pulsewidth, 400 pps PRF,and 6-RPM antenna scan rate. In the SHORT mode,the system has a 0.5 µsecond pulsewidth, 1600 ppsPRF, and 12-RPM antenna scan rate.HV PUSH BUTTON.— This is the high-voltageselect switch. There are three indications on theswitch, of which only two are selectable. As soon asthe system power is turned on, the WARMUP sectionilluminates. This section will remain illuminateduntil the system has warmed up. The operator cannotapply high voltage until the system has warmed upsufficiently. After approximately 3 minutes ofTilt stabilization:Pitch and roll ±30 degreesA361 Antenna Elevation Parking ControlThe antenna elevation parking control is used tostow the aft antenna in a zero-degree elevationattitude, relative to the aircraft, when the aft radar is inthe standby mode.C-7512/APS-115 Radar Control PanelThere are two radar control panels (fig. 3-5), onefor the forward and one for the aft system. Thiscontrol panel enables the operator to turn the systemon and control most of the functions of each system.There are 12 function switches and 2 fail lights oneach control box.WARNINGEnsure power is applied to the RADARSCAN switch on the C324 TACCO controlpanel prior to applying power to theAPS-115 radar system. If the RADARSCAN switch is left off and then turned onafter power is applied to the APS-115, thesystem will automatically cycle to highvoltage on.Figure 3-5.-C-7512/APS-115 radar control panel.3-5
warm-up time, the WARM-UP section willextinguish, and the STBY section illuminates. Thistells the operator that the system is ready for use.Press the HV push button now to apply the radaroperating power. When the operating power isapplied, the HV ON section will illuminate. Press thepush button to alternately select HV ON and STBY.FTC SWITCH.— This switch controls thereceiver’s fast time constant circuitry. With thisswitch in the FTC position, the targets displayed havestrong leading edges and attenuated trailing edges.This improves the display when the target is near alandmass.LOAD SWITCH.— This switch controls thewaveguide switch on the ante ma unit. When theANT section is illuminated, the RF energy is actuallyradiated by the antenna. In the DUMMY mode ofoperation, the RF energy is fed into the dummy loadon the antenna. In this mode, there is no radiation outof the antennaCAUTIONEnsure the radar system is in STBY priorto selecting or deselecting DUMMY Loadto avoid damaging equipment.PWR SWITCH.— This is the system powerswitch. It applies power to the system and starts thewarm-up period.RANGE knobs are rotated fully clockwise, close-intargets could be blanked from the display.AFC/MAN SWITCH.— This switch selectseither the AFC mode or the manual tuning mode ofoperation. In the AFC position, the local oscillatorhas the automatic frequency control circuitryconnected to it. With this switch in the MANposition, the operator can manually tune the localoscillator. If the system is manually tuned correctly,there should be no difference in the video in eitherposition. The system is locked in the fixed-mode ofoperation if this switch is in the MAN position,regardless of the position of the FREQ push button.MAN TUNE KNOB.— This is the knob theoperator rotates to manually tune the local oscillatorwhen the AFC/MAN switch is in the MAN position.FAIL LIGHTS.— There are two lights located onthe control panel to indicate there is a problem withthe system. One is the RT light, and the other is theAPP light. The RT light will illuminate when thereceiver-transmitter BITE circuitry detects a failure inthe RT. The APP light will illuminate when the BITEcircuitry detects a failure in the antenna positionprogrammer.C-7557/ASA-69 Radar Scan ConverterControlThe radar scan converter (fig. 3-6) and associatedcomponents provide the interface between the dataprocessing system and the APS-115 radar set. It alsoRCVR GAIN KNOB.— This knob controls thereceiver gain of the system. The operator will adjustthe gain until the radar noise levels are matchedbetween the forward and aft radars.VIDEO TEST SWITCH.— This switch willselect the video self-test circuitry in its respective RTfor an overall performance check. If the PULSE pushbutton is in the LONG position, the display shouldshow simulated targets 1 nautical mile apart. In theOFF position, the system is in the normal mode ofoperation.STC DEPTH KNOB.— This knob will vary theamount of receiver attenuation for close-in targets. Itis used in conjunction with the STC RANGE knob.STC RANGE KNOB.— This knob varies therange to which the intensity of target return iseffectively reduced. It will vary the range between 0and 20 nautical miles. If both the DEPTH and theFigure 3-6.-C-7557/ASA-69 radar scan converter control3-6
completes the processing of radar and IFF video foron-line/off-line display. It works in conjunction withthe radar interface unit (RIU). The converter controlroutes the on-line/off-line selection to the RIU. Thereare five controls on the converter, of which four areused for off-line operation.ON LINE/TEST SWITCH.— This push buttonis used to select on-line/off-line operation of the radarset. When the ON LINE section is illuminated, theRIU is slaved to the nonacoustic operator’s keyset. Inthis mode of operation, all the manual selections onthe RIU front panel are deactivated. The onlyexception to this is the power switch.If you press the push button switch, it willilluminate the TEST section of the switch. With thissection illuminated, the radar set is in the off-linemode of operation. This means the RIU will respondto inputs from the RIU front panel.RANGE SEL MILES SWITCH.— This switchenables the operator to select radar range duringoff-line operation. The operator has the option ofselecting either 8, 16, 32, 64, or 128 nautical miles.RANGE ENTER PUSH BUTTON.— This pushbutton enters the radar range, selected on the RANGESEL MILES switch, into the RIU logic circuits duringoff-line operation. The indicator push button willilluminate amber, when pressed, denoting entry intoRIU logic. The indicator will return to green whenreleased.RANGE RINGS PUSH BUTTON.— Rangerings are added to radar video during off-lineoperation when this push button is pressed. Theindicator will illuminate amber, denoting that therange rings are selected. If you press the push buttonagain, it will deselect the range rings and return theindicator to green. Two range marks are developedfor the 8 nautical mile range, four marks for the 16and 32 nautical mile range, and eight marks for the 64and 128 nautical mile range.STORAGE TIME SECONDS SWITCH.— Thisswitch is not used at this time.MX-7974/ASA-69 Radar Interface UnitThe function of the radar interface unit (RIU) is toprovide radar data interface and the commanddecoding interface. Figure 3-7 shows the controlpanel located on the RIU. The RIU combines rawradar video from the APS-115 and IFF video from theIFF synchronizer. This video is then amplified androuted to the nonacoustic operator’s display.There are nine operating controls on the controlpanel of the RIU, of which three are not used. Thesethree are the OFFSET switch, the STOR switch, andthe OFFSET X/Y switch. Of the other six, five aredeactivated during on-line operation. Only thePOWER switch is activated.POWER SWITCH.— With this switch in theON-NORMAL position, operating power is applied tothe RIU. In the OFF position, there is no operatingpower applied.ENTER PUSH BUTTON.— This switch enablesthe operator to enter commands selected on the frontswitch panel into the RIU logic circuits. It must bepressed after each selection.HV ON/OFF SWITCH.— This switch enableshigh voltage to be turned on or off in the off-linemode. The HV ON/OFF position of the COMMANDSELECTION switch must be selected prior tochanging the position of this switch.COMMAND SELECTION SWITCH.— Thisrotary switch enables the operator to select the variouscommands for entry into the RIU logic circuits. TheFigure 3-7.-MX-7974/ASA-69 radar interface unit control panel.3-7
operator rotates the switch to the particular commandto be changed, changes the corresponding switch, andthen presses the ENTER push button.NOTE: The ENTER push buttonpressed after each selectionCOMMAND SELECTION switcheach command to the RIU logic.must beon theto routeThere are seven positions on this rotary switch.Only three of these positions are used. The usablepositions are the HV ON/OFF position, the 400/1600PRF position, and the RAW RADAR position.RAW RADAR SWITCH.— This switch allowsthe operator to select the type of display presentation.The options available are either an A-scan, selectedby the A-SCAN position, or a PPI scan, selected bythe PPI position.PRF SWITCH.— This switch enables theoperator to select either a 1600 or 400 PRF (long orshort pulse mode).SEARCH RADAR FUNCTIONALDESCRIPTIONThe signal flow block diagram is shown infigure 3-8. The following section will explain inmore detail the functional signal flow of the variouscomponents.The forward and aft radar control boxes and theantenna control box provide mode control to the APPfor execution and distribution throughout the radarset. The APP processes and coordinates forward andaft antenna position and scan functions, theapplication of power to both sets, and controlstransmit and receive modes of the two RT's.Figure 3-8.-APS-115 radar signal flow diagram.3-8
In the on-line mode, the sensor station 3 keysetgenerates primary control signals, which areprocessed through the central computer, logic unitNo. 1 (LU 1), and the RIU. The antenna controlprovides signals to control the radar scan functionsand tilt servo loop stabilization. The two radarcontrol boxes control the sensitivity time adjustments,receiver gain, fast time constant, automatic frequencycontrol, and video test of the respective RT.FIRE CONTROL RADARLearning Objective: Recognize operatingmodes and system controls used in a firecontrol radar.The 11D13A radar maintenance trainer device isdiscussed in the following text. This system wasselected because an actual operational system wouldrequire that classified information be included.Because the trainer is different from an operationalsystem in some respects, these differences are notedwhen discussion will not violate security regulations.The 11D13A trainer device includes all theelements essential for basic search radarranging —transmitter, receiver, antenna, andsynchronizer circuits. Additional elements, includingtracking, stabilization, and target generation(simulated targets), allow operation as either a firecontrol (intercept) radar or a bomb director radar. Thetarget generator unit, although not usually containedin operational radar systems, produces athree-dimensional target that is controllable inazimuth, range, and elevation in a manner typical ofanalog computing systems. It contains bothmechanical and electronic elements found in analogcomputing systems. A block diagram of the trainer isshown in figure 3-9. The ranges in the trainer varyfrom 0 to 80,000 yards. An actual weapons controlradar has much longer ranges, which are normallyexpressed in miles.OPERATING MODESThe 11D13A trainer is capable of operating inthree basic modes-search (PPI), fire control, andbomb director. Fire control is divided into fiveFigure 3-9.-Trainer 11D13A functional block diagram.3-9
submodes—automatic search, manual search, lockon, automatic track, and breakaway. These submodesparallel the general submodes found in actualweapons control systems.The trainer has no standby mode as such. (Thepurpose of a standby mode is to apply filamentvoltages for initial warm-up before selecting anoperating mode.) Most radar sets include anautomatic time-out (time-delay) circuit, whichprevents application of power to the high-voltagesections prior to the necessary warm-up period.Search ModeSearch operation for airborne and ground targetsis provided with ranges of 0 to 6,000 yards and 0 to12,000 yards. In this mode the antenna automaticallyscans the horizon, rotating in a clockwise direction at6 RPM. Manual control of the antenna in this modeprovides manual tracking of detected targets. Thereare some minor differences in the methods of manualcontrol; however, they are of little consequence.Range marks are selectable in 1,000-, 2,000-, or3,000-yard increments. In the basic search mode, theB-scope, which is also included in the indicator unit,is deactivated.Fire Control ModeWhen the fire control mode is selected, the targetsimulator provides a three-dimensional target (targetwith range, azimuth, and elevation information). Inthe fire control mode, there are fivesubmodes—automatic search, manual search, lockon, automatic track, and breakaway. The fivesubmodes permit the simulated target to be detectedinitially, manually tracked and acquired, and trackedautomatically until minimum range is reached. Atthis time, a breakaway signal in the form of a large Xis displayed on the B-scope indicator, warning theoperator to break away from the target. In an actualweapons radar, the breakaway X also means that theaircraft is too close to the target to allow time for anair-to-air missile to properly track the target.Minimum range in fire control operation is 3,500yards. Three ranges are provided for targetinformation while operating in the fire controlmode-0 to 10,000, 0 to 40,000, and 0 to 80,000yards. During this mode of operation, targetinformation is displayed on both the PPI and B-scopeof the indicator display unit. The B-scan display usesa dual-gun arrangement (to be discussed later), whichprovides steering information in addition to thenormal plot display.Bomb Director ModeOperation in the bomb director mode covers thesame ranges provided in the fire control mode.Aiming information is displayed on the PPI display.Switching circuits, which are energized at the time ofmode selection, cause the presentation to be altered toconform to typical bomb director system presentations.The PPI display has a depressed-center sectorscan at twice the scale of the fire control mode. Theindicator includes controllable range and azimuthmarks (strobes), which act as cross hairs to facilitateaiming (aim point tracking).SYSTEM CONTROLSThrough the manipulation of the basic controls,the operator has available all of the previouslymentioned modes of operation. The controls of thetrainer are decentralized to simplify construction andoperation, but these controls can be grouped into fivemajor categories according to their function. The fivemajor control functions are as follows:1.2.3.4.5.Power switchMode switchPower SwitchReceiver gain controlAntenna control (hand control)Auxiliary controlsThe power switch is the system’s off-standbyoperateswitch. The off position, of course, removesall power from the system. The standby position, aspreviously described, would apply filament powerand keep alive voltage to the TR tubes. For purposesof training, the 11D13A has a power switch for eachof the major units antenna transmitter, and so forth).This allows for operation of each of the units or anyselected combination of units for training. During thediscussion throughout this chapter, the appropriatecontrol will be noted, along with its function and itsrelationship to one of the four major functioncontrols, if necessary.3-10
Mode SwitchThe mode switch is practically self-explanatory.In the trainer, this switch sets up one of the basicoperating modes available, such as search, bombdirector, or fire control.Receiver Gain ControlThe receiver gain control is one of the mostimportant controls available to the operator, whetherthe pilot in the aircraft or an operator on a trainer.This control, if not properly adjusted, will prevent theentire system from operating at peak performance.Some radar systems include a built-in test function,which provides a reasonable check of the adjustmentof the receiver gain control. This control is normallyadjusted for best definition of the weakest targetavailable. There is only one acceptable method foradjusting this control to obtain peak detection, whichprovides maximum range. In each particular radar,this method is part of the minimum performance test.Antenna Control (Hand Control)The hand control of an actual radar installationallows the operator to select manual search operationand selection of targets. Through the use of thiscontrol, the operator may command the radar toacquire and/or release the target. The 11D13A hastwo controls, one for azimuth and one for range.During automatic search, these controls have twofunctions---(1) to position the antenna in elevationand azimuth, and (2) to select the area to be searchedin relation to the horizon. You can see that thesecontrols and the receiver gain control are veryimportant because they will affect target detectionperformance.INDICATOR DISPLAYSA description of the indicator displays (PPI orB-scope) in the three basic modes of operation and thesubmodes of fire control is given in the followingparagraphs. The indicators are used to monitorsystem performance during simulated operation in allweather conditions.Basic SearchIn the basic search mode, information is displayedon the PPI only. As shown in figure 3-10, the PPIscan presentation may be a maplike picture of theearth’s surface being seamed. The range sweep linerotates in synchronization with the antenna through afull 360-degree cycle. Targets appear on the face ofthe CRT as an intensified light spot. The range of thetarget is indicated by its position on the radius of therange sweep line, and target azimuth position isindicated by the angle of the sweep line at the time thetarget is painted. The top of the scope is 0 degree, andmay indicate dead ahead.If 1,000-yard marks are selected, the two rangemarks shown in the figure are 1,000 yards apart. Thefirst range mark, which starts from the center of thescope and moves outward toward the edge of thescope face, indicates targets from zero to 1,000 yards.There are two targets shown in figure 3-10 that arebetween the 1,000- and 2,000-yard marks. Othertargets are shown at greater ranges and at differentThe hand controls have complete control of theantenna during manual search, and, in addition, alsocontrol the acquisition symbol to acquire the target.Auxiliary ControlsThrough the use of a scan switch in an operationalradar, the operator may select either full azimuth orsector scan. The trainer, likewise, incorporates a scanswitch that may be used to select the type of scandesired. In the trainer, the selections are automaticsweep at a 6-RPM rate, variable sweep from zero to 6RPM manually controlled, or sector scan.Figure 3-10.-PPI scan presentation basic search.3-11
azimuth positions. The presentation shown could be aground map of an area of the earth’s surface showingseveral islands. The shape of the target appearing onthe scope will be almost the actual shape of the targetas viewed visually. If, however, the antenna werescanning above the horizon, an airborne target wouldbe a very small bright spot, and the target shape wouldnot be defined.Fire Control (Automatic Search)In the automatic search submode of fire control,information is displayed on both indicators. The PPIpresents target range and azimuth information asbefore. Now, the B-scope also presents informationthat, if the system were operating in an aircraft, wouldbe required to make a successful attack on an airbornetarget. This information is shown in figure 3-11.In figure 3-11, which is a normal B-scan searchdisplay, four items of interest are painted electricallyon the face of the CRT. The first is the range sweepline, sometimes referred to as the B-trace. This time,however, the sweep is from the bottom of the scope tothe top. Range on a B-scope is measured from thebottom of the scope to the top. The length of the tracethen is equal to the range selected. If the 0- to10,000-yard range is selected, the length of the rangesweep line is 10,000 yards. The position of the sweepline on the face of the scope, as was the sweep line onthe PPI, indicates the azimuth position of the antenna.The trace scans back and forth, following the antenna.You should notice that the scan line is not a singleline, but is made up of several lines, causing it tobecome a 1/4-inch-wide scan line. This is called“jizzle,” and is the result of simulated antenna spinmodulation. In an actual radar system, this isaccomplished by nutation of the antenna feed horn orreflector dish. In the trainer a scan generatorproduces the effect of the antenna nutation, but theantenna is not actually nutated. Figure 3-12, view A,shows an antenna pattern that is simulated in thetrainer. In view B of figure 3-12, a boxlike pattern isproduced. This is accomplished by introducing a nodat the end of the scan.The second item on the scope is video (targets).As the antenna scans back and forth, any target withinthe range of the radar appears as a bright spot on theface of the CRT. The range of the target is indicatedby its vertical distance from the bottom of the scope.The azimuth position of the target is indicated by theposition of the target either to the left or to the right ofFigure 3-11.-B-scan presentation in automatic search.the center. For example, if the target appears asshown in figure 3-11, its range is 7,500 yards (on the10,000- yard range scale), and it is to the left of theattacking aircraft. Most radars installed infighter-type aircraft also have an indication of theantenna tilt, which is used to indicate elevationposition of the target relative to the attack aircraft. Ifthe target were above the attacking aircraft, theantenna would have to be tilted up to receive a targetecho. The amount of tilt can then be read from theindicator, and the pilot may steer the aircraftaccordingly to intercept the target.The third item on the B-scope is the acquisitionsymbol. During automatic search, the acquisitionsymbol is relatively unimportant, but it is movable,and could be used to mark the area of target return.The symbol, as shown in figure 3-11, is made of twoshort vertical lines slightly separated. Position of thesymbol in the vertical indicates range, and iscontrolled by the range circuits, which, in turn, arecontrolled by the hand control in an actual radarsystem. Movement of the hand control back orforward decreases or increases range voltage, whichcauses the acquisition marks to move in or out inrange. The acquisition marks are also controllable inazimuth by movement of the hand control either to theleft or to the right. Therefore, the acquisition marksmay be positioned anywhere on the face of the scope.This is described in greater detail later.The fourth symbol on the face of the scope is theartificial horizon line. This symbol is a straight linewith the center blanked out, and is positionedhorizontally on the face of the indicator tube. The3-12
purpose of the horizon line is to indicate aircraftattitude. In automatic search, the horizon linerepresents the earth’s horizon; when the aircraft rollsor pitches, the artificial horizon banks or moves up ordown with the aircraft’s movement. This movementof the horizon line is controlled by outputs from theaircraft vertical gyro or stable platform.Fire Control (Manual Search)Manual search allows the operator to stop theantenna from scanning and to direct it toward anydesired target detected during automatic search. Tiltor elevation control of the antenna, which wasprovided in automatic search, is still available inmanual search. In addition, control of the antenna inazimuth is now available. In the operation of anactual radar installation, control of the antenna in bothelevation and azimuth is a function of the handcontrol. In the trainer, however, azimuth andelevation controls are separate. The provision ofseparate controls is of no great significance, exceptfor convenience of operation.When manual search is initiated, the acquisitionmarks bracket the range sweep line (B-trace), andboth the B-trace and the acquisition marks movetogether in azimuth. The position of the acquisitionmarks in range is also available in the manual searchmode. This allows them to be positioned anywhereon the B-trace from zero to maximum range,depending on range selected. For example, if theradar is operating in the 0- to 10,000-yard range, anda target appears at 5,000 yards, the acquisition marksmay be moved to bracket the target by use of therange control.The major display differences between automaticsearch and manual search are that the acquisitionFigure 3-12.-A. Antenna scan pattern. B. Antenna coverage pattern.3-13
marks bracket and move with the B-trace, and theantenna is controllable in azimuth. All symbols thatwere present in automatic search, including theartificial horizon, are present in manual search. Thehorizon line still functions to indicate aircraft attitude.It should also be reasonable to expect to see no targetsother than the ones that appear on the range sweepline, since the antenna is no longer scanning.Fire Control (Lock on)The lock on mode is a momentary mode ofoperation between manual track and automatic track.Some radars combine the previously describedmanual operations and lock on mode into one modecalled “acquisition.” The term acquisition, as used inoperation of a radar set, refers to a momentary modeof operation. The time period for acquisition beginsat the moment the operator depresses a control switchtransferring antenna control from automatic search tomanual search. During this period, the operator hascomplete control of antenna position, both in azimuthand elevation, and may also control a symbol on theindicator called an “acquisition symbol.” If theoperator places the acquisition symbol over theselected target, it causes coincidence between thetracking gate and the target in the range and trackingcircuits of the radar. Acquisition is complete whenlock on occurs, and the system switches to automatictrack. Lock on is accomplished by a change in theB-scope presentation and the blanking of the PPIscope. However, in the trainer, manual track may becontinued after leek on, if desired.On the B-scope, the acquisition symbol isremoved and replaced with a range strobe or notchsuperimposed on the target, as shown in figure 3-13.The artificial horizon remains as before. Note thereare two symbols present now that were not previouslypresent. One of these is a small dot, called a steeringdot. The purpose of the steering dot is to indicateantenna position, which also presents target positionwith respect to the attacking aircraft. For a purepursuit course, the pilot need only maneuver theaircraft to cause the steering dot to remain in thecenter of the scope. When the steering dot is in thecenter of the scope on a pure pursuit course, the targetis dead ahead of the attacking aircraft.The second symbol, which was not present in theprevious modes, is a circle. This circle is called a“range circle,” and its diameter is proportional torange. Normally, lock on occurs at near maximumrange, which produces a range circle of maximumsize. As the range between the attacking aircraft andthe target decreases, the diameter of the circle alsodecreases, keeping the operator informed of the rangeto the target. In addition to these symbols, two otherindications of range are presented at the time the radarlocks on. A light, known as the lock on or acquisitionlight, is illuminated when the target has been acquiredand lock on has been accomplished. Range is alsopresented in digital form in a small window similar tothe mileage counter of an automobile.Fire Control (Automatic Track)The automatic track submode of fire controlresults from the manual track mode upon release ofthe manual controls (range and azimuth). Remember,prior to automatic tracking, the antenna had beenmanually controlled in both elevation and azimuth,and the range strobe (notch) had been controlled bythe range control. To initiate automatic tracking, theoperator releases the manual controls, and the radarswitches to automatic track. At this time, the antennais caused to track the target by the antenna servosystem error circuits.Range tracking is accomplished in the rangetracking circuits. Automatic tracking continues untilone of three things occurs. First, lock on will be lostif the attacking aircraft is closing on the target at a rategreater than 700 knots, or if an opening rate greaterthan 200 knots should occur. Second, the target willbe lost, and the radar will unlock if the target does notremain within the tracking window (antenna limits inazimuth and elevation). Finally, the target will be lostif the range exceeds maximum tracking range.Figure 3-13.-B-scan presentation after lock on.3-14
Maximum range for tracking is 40,000 yards. Atranges beyond 40,000 yards, the return echo will betoo weak to maintain lock on. If unlock occurs, thesystem is automatically returned to automatic search,and the cycle of manual track and acquisition must berepeated to regain target tracking.Fire Control (Breakaway)The final submode of fire control is known asbreakaway. This mode occurs automatically if thetarget is tracked to a range that would endanger theattacking aircraft. During automatic track of a targetthat has a decreasing range (attacking aircraft isclosing on the target), the range circle is removed atthe time the range to the target gets to 3,500 yards. Inits place, a large X is displayed, which indicates timeto breakaway from the attack (fig. 3-14). Also at thistime, the steering dot will move to a position on thescope to indicate the safe direction for the attackingaircraft to turn to execute a safe breakaway. In theillustration, minimum range has been reached and thebreakaway X has appeared. The steering dot ispresently positioned to the right and above center.Bomb Director ModeWhen the bomb director mode of operation isselected, information is displayed on the PPIindicator. In this mode, the antenna automaticallygoes to sector scan, scanning a 60-degree arc, 30degrees to each side of dead ahead. Antennaelevation is manually controlled. The PPI scope has aFigure 3-15.-PPI presentation in bomb director mode.depressed center, which appears as a wedge-shapedscan on the indicator face, as shown in figure 3-15.The antenna is positioned in elevation so it will scanthe surface of the earth during a bomb attack. TheB-scope will only display the artificial horizon in thebomb director mode.The target tracking range and azimuth strobesappear on the indicator; they are moved manually sothe marks form a cross hair effect, and are centeredover the target to be tracked. Tracking is maintainedmanually in the bomb director mode. The azimuthand range strobes are controllable from 0 to 80,000yards, and, in azimuth, 25 degrees to either side ofcenter.IFF SYSTEMSLearning Objective: Recognize componentsand operating principles of an IFFtransponder set and an IFF interrogator set.There are two systems that make up the IFFsystem on an S-3 aircraft. These systems are theAN/APX-76A and the AN/APX-72. Both systemswork in conjunction with the radar set for total andsecure identification.TRANSPONDER SET AN/APX-72Figure 3-14.-B-scan presentation breakaway indication.The transponder set provides IdentificationFriend or Foe (IFF) radar replies when challenged bya valid IFF interrogator. The IFF transponder3-15
operates at 38 Hz. The lobing action prevents theantenna system from being blanked out during aircraftmaneuvers.TRANSPONDER SET CONTROL C-6280(P)/APX.— The IFF control box (fig. 3-17) provides theIFF transponder operational and test controls. TheIFF transponder control box controls the transponderin any of the five modes: modes 1, 2, 3A, C, and 4.Figure 3-16.-SA-176/A RF transmission line switch.RECEIVER-TRANSMITTER RT-859/APX-72.— The receiver-transmitter (fig. 3-18) willprocesses valid IFF interrogations and provides codedpulse train replies to give automatic radaridentification of the aircraft in one of five modes. Thefive modes are discussed later in this chapter.The transponder set also provides the SelectiveIdentification Feature (SIF) to permit a specificaircraft to be selected from other properly respondingaircraft.Major ComponentsThe transponder set consists of four main boxesand a test set. These components will be discussed inthe following text.RF TRANSMISSION LINE SWITCHSA-1769/A.— The RF transmission switch (fig. 3-16)alternately connects the transponder set to the top orbottom UHF L-band antenna. This switching (lobing)Figure 3-17.-C-6280(P)/APX transponder control box.Figure 3-18.-RT-859/APX-72 receiver-transmitter.3-16
transmit a reply when RF interrogation is receivedfrom an IFF interrogator. If the interrogation is valid,a coded reply is transmitted. This reply is received bythe interrogator and processed for display for aircraftidentification and location. The transponder iscapable of operating in five modes and superimposingfour special signals on the mode replies.COMPUTER KIT-1A/TSEC.— This computerallows the IFF transponder to respond to mode 4interrogations. Mode 4 is a secure mode of operation.TRANSPONDER TEST SET TS-1843/APX.— The test set (fig. 3-19) generates properlycoded test signals for the desired mode. Theseinterrogation signals are then applied to thetransponder. The test set then checks the replies forfrequency, bracket-pulse spacing, power, and antennastanding-wave ratio. The resulting IFF system checkwill provide a GO/NO-GO indication on the IFFtransponder control box.Transponder Set Functional DescriptionThe IFF transponder control box allows anautomatic IFF capability when the aircraft isinterrogated by a valid interrogation. Special modesand codes can be manually set on the IFF control box,receiver-transmitter, and on the computer. Thecontrol box also initiates the self-test function throughthe test set.RECEIVED SIGNALS.— The interrogatortransmittedsignals are received by the aircraftthrough the UHF L-band blade antennas. Thesesignals are on a frequency of 1030 MHz. Thereceiver-transmitter recognizes the signals throughpulsewidth and spacing detection. Modes 1, 2, 3/A,C, and TEST use two interrogation pulses and oneside-lobe suppression pulse that are 0.8 (±0.1)microsecond wide. Pulse spacings between the twointerrogation pulses are slightly different, dependingon the mode. These spacings are as follows:Mode 1:Mode 2:Mode 3/A:Mode C:TEST:3.0 (±0.2) microseconds5.0 (±0.2) microseconds8.0 (±0.2) microseconds21.0 (±0.2) microseconds6.5 (±0.2) microsecondsFigure 3-19.-TS-1843/APX test set.IFF TRANSPONDER RECOGNITION.—Recognition of the interrogation mode is done bypassing the first interrogation pulse through atime-delay circuit and matching this first pulse withthe second pulse position. The delays are of 3, 5, 8,or 21 microseconds. Mode 4 capability is providedwhen the computer is operating in the system. Mode4 interrogation pulse characteristics consist of fourpulses 0.5 (±0.15) microsecond wide, referencedfrom the leading edge of the first pulse in multiples of2 microseconds. The 4 pulses maybe followed by asmany as 33 additional pulses spaced as close as 2microseconds. The side lobe suppression pulse isplaced 2 (±0.15) microseconds from the leading edgeof the fourth pulse.SIDE-LOBE SUPPRESSION.— The side-lobesuppression pulse allows the transponder to accept themain lobe and to reject minor lobe signals from theinterrogation stations. This ensures correct operationof the system.3-17
Table 3-1.-Correlation of Dial Settings with Pulse PositionIFF TRANSPONDER RESPONSE.— Table 3-1shows the correlation of dial settings with pulsepositions. If you use this table, along with theexamples given in figure 3-20, you will get an idea ofwhat the pulse trains will look like for the variouscodes. Figure 3-21 shows the interrogation and replypulse train characteristics.Mode 4 reply pulse video characteristics aredetermined by the computer. The reply is framed bytwo pulses spaced 23 (±0.05) microseconds apart. Inmodes 1, 2, and 3/A, the presence or absence ofinformation pulses at predetermined spacings isdetermined by the settings on the transponder controlbox. In mode C, this information is determined by theFigure 3-20.-Information pulse train examples.3-18
airspeed-altitude computer. All framing andinformation reply pulses are 0.45 (±0.1) microsecondwide. All modes are transmitted by the RT at afrequency of 1090 MHz.Mode 1.— The reply pulse train consists of fromzero to five information pulses framed by two framingpukes. The spacing between the information pulses isin multiples of 2.9 (±0.05) microseconds from theinitial framing pulse. The position where the sixthinformation pulse would be (17.4 [±0.05] microsecondsfrom the initial framing pulse) is not used.There are 32 different codes available for use from thespecified five information pulses.Mode 2 and 3/A.— When transmitted, these replytrains contain from zero to 12 information pulses, plusthe two framing pulses. The information pulsespacing is in multiples of 1.45 (±0.05) microsecondsfrom the initial framing pulse. The position where theseventh information pulse would be (10.5 [±0.05]microseconds from the initial framing pulse) isnormally not used. There are a possible 4,096different codes available from the specified 12information pulses.Mode C.— When the Airspeed-Altitude Computeris connected in the system, the reply trainconsists of from 1 to 11 information pulses and 2framing pulses. The information pulses are spaced inmultiples of 1.45 (±0.05) microseconds from theinitial framing pulses. The positions where theseventh and the ninth pulses are normally located(10.5 [±0.05] and 13.05 [±0.05] microseconds fromthe initial framing pulse) are not used. When there isa pulse in the thirteenth position (18.85 [±0.05]microseconds from the initial framing pulse), there isa special position indicator pulse also generated in thetrain. This pulse is located 24.65 (±0.05) microsecondsfrom the initial framing pulse. There is atotal of 2,048 possible codes available from thespecified 11 information pulses. When theairspeed-altitude computer is not on-line, the replytrain will be the framing pulses only.Mode 4.— This reply train is determined by theKIT-1A/TSEC.IDENT Function.— The identification-ofposition(IDENT) function is used in modes 1, 2, and3/A. The IDENT function, which can be selected bythe pilot for transmission for approximately20-second intervals, is used to distinguish betweenaircraft displaying the same coding. When used inmode 1, the reply pulse train containing the code inuse is transmitted twice for each trigger puke received.The second train is 24.65 (±0.05) microseconds fromthe leading edge of the first framing pulse of the firstreply train. The IDENT function in modes 2 and 3/Auses the special position indicator (SPI) pulse. The replypulse train containing the code in use is followed by apulse for each trigger received. This SPI pulse is 24.65(±0.05) microseconds from the leading edge of the firstframing pulse of the reply train.Emergency Function.— The EMERGENCYsignals are selected by the pilot to indicate an in-flightemergency. The emergency function is used withmodes 1, 2, and 3/A. For modes 1 and 2, the replypulse train containing the code in use is transmittedonce for each trigger pulse received, followed bythree sets of framing pulse pairs with no informationpukes. The three sets of framing pulses are located24.65 (±0.1), 44.95 (±0.15), 49.30 (±0.20), 69.60Figure 3-21.-Normal reply pulse characteristics.3-19
(±0.25), 73.95 (±0.30), and 94.25 (±0.35) microsecondsfrom the leading edge of the initial framingpulse. In mode 3/A, one reply pulse train containingthe code 7700 is transmitted, followed by the threesets of framing pulse pairs with no informationpulses. The location of these framing pulse pairs isthe same as in modes 1 and 2.Special Position Indicator.— The specialposition indicator (SPI) allows the air trafficcontroller to differentiate aircraft above or below agiven altitude. This puke is present in the reply pulsetrain in mode C when a D4 pulse (18.85 [±0.05]microseconds from the initial framing pulse) is used.The SPI pulse is located 24.65 (±0.01) microsecondsfrom the initial framing pulse. This pulse issometimes called the mode C caboose pulse. ThisSPI pulse is the initial framing pulse for the secondreply pulse train. The SPI pulse is the same pulseused in the mode 2 and 3/A IDENT function.X-Pulse Function.— Special aircraft, such asdrones, are identified by the transmission of theX-pulse. This pulse (10.15 [±0.05] microsecondsfrom the initial framing pulse) appears in a normallyunused position. This pulse is generated when theIFF transponder control box is modified by groundinga single external control lead. With this modification,all replies in modes 1, 2, and 3/A will include thispulse, along with the normal framing and informationpulses.SELF-TEST MODE.— When the TEST switcheson the IFF transponder control box are enabled, aninterrogation pulse pair is applied from the test set tothe receiver-transmitter. Upon receiving theseinterrogation pulses, the RT replies to the test set. Thetest set then analyzes the replies for bracket-spacingfrequency, power, and antenna circuit VSWR. Thetest set will give a GO/NO-GO indication on thecontrol box. There is a switch for each of the modes1,2, 3/A, and C.MONITOR OPERATION.— When the RADTEST-OUT-MON switch on the IFF transpondercontrol box is set to the MON position, thetransponder performance is checked. The test set willmonitor the performance by detecting the repliesgenerated in response to external interrogationsignals. If a GO condition is detected, the TESTindicator on the transponder control box willilluminate. For a NO-GO condition, the TESTindicator remains off.INTERROGATOR SET AFUAPX-76A(V)The interrogator set is used in conjunction withthe aircraft’s radar set. It provides air-to-air modes 1,2, 3/A, 4, SIF, and IFF mode 4 challenges. The IFFinterrogator receives a basic trigger from the radar set,and a delayed radar trigger is returned to the radarafter generation of the IFF interrogator trigger. TheIFF replies are decoded and combined with thedisplayed radar return video. The interrogator setuses receiver side-lobe suppression (RSLS) andinterrogator side-lobe suppression (ISLS). The videooutput is developed in the IFF interrogator, and isapplied to the radar set for display.Interrogator Set Major ComponentsThe interrogator set consists of six majorcomponents. These six are discussed in the followingtext.ANTENNA AS-2719/AP.— The interrogator setuses an antenna that is hard mounted to the radar setantenna The IFF portion of the antenna is imbeddedin the upper part of the antenna dish, and consists of10 IFF elements.INTERROGATOR SET CONTROL C-7383/APX-76A(V).— The interrogator control box(fig. 3-22) provides operating mode selection of theSIF, or mode 4 code. The control box contains fivethumbwheel switches to select the desiredinterrogation mode, or standby, and the desired code.A momentary two-position toggle switch(TEST/CHAL CC) allows for loop-testing the IFF, orto provide correct code challenge. The loop-testingallows for the interrogation of the onboardtransponder set (AN/APX-72) by the IFF interrogator.Correct code challenge enables interrogations forwhich IFF display pulses are generated if the receivedFigure 3-22.-C-7383/APX-76A(V) interrogator control box.3-20
SIF reply code is identical to the code switch settings.There are two indicators (FAULT and CHAL) thatindicate correct operating status of the system. Themode 4 alarm may be overridden by using the toggleswitch M4 ALARM OVERRIDE.RECEIVER-TRANSMITTER RT-868A/APX-76A(V).— The receiver-transmitter (fig. 3-23)takes the mode 1,2, 3/A, or 4 interrogation and ISLSpulses and modulates a 1030 MHz carrier wave withthem. This is the transmitted signal from theinterrogator set. The transponder reply signal, at thereply frequency of 1090 MHz, is amplified, detected,and processed by the receiver section. The replyvideo is then sent to the radar set for display on thevarious indicators.There are three fault flags on the front of the RTthat indicate malfunctions in one of the threefunctional sections of the receiver-transmitter.SWITCH-AMPLIFIER SA-1568A/APX-76A(V).— The switch-amplifier (fig. 3-24) switches theinterrogator’s RF output from the sum antennachannel to the difference antenna channel for theduration of the ISLS pulse. During this time, theoutput is amplified by 4 to 7 dB. This amplificationprovides the required antenna output characteristics.ELECTRONIC SYNCHRONIZER SN-416A/APX-76A(V).— The synchronizer (fig. 3-25)generates the initiation and interrogation cycles. Thesynchronizer provides a functional link between theFigure 3-24.-SA-1568A/APX-76A(V) switch-amplifier.radar trigger generation and the radar modulationcircuits.COMPUTER KIR-1A/TSEC.— This computeris used for mode 4 security and decoding for secureoperation.Interrogator Functional DescriptionThe IFF interrogator challenges and identifiesproperly equipped targets on the display groups. Itchallenges in modes 1, 2, 3/A, SIF, or mode 4. Targetresponses are shown on the display group next to thetarget in the form of numbered cues.MODES 1, 2, AND 3/A TRANSMISSION.—When the TEST-CHAL CC switch on the interrogatorcontrol box is set to the CHAL CC position, theinterrogation cycle is initiated and lasts for 5 to 10seconds. The basic radar trigger is applied to theFigure 3-23.-RT-868A/APX-76A(V) receiver-transmitter.Figure 3-25.-SN-416A/APX-76A(V) synchronizer.3-21
synchronizer, and a delayed radar trigger is sent backto the radar set after the interrogation trigger isgenerated. The synchronizer develops three basicsignals:. The interrogator trigger which, via thereceiver-transmitter modulating circuit, modulates thetransmission. The interrogation trigger consists ofthree pulses. P1 and P3 are interrogation pulsesspaced either 3, 5, or 8 microseconds apart. In mode1, the spacing is 3 microseconds, mode 2 has a5-microsecond space, and mode 3/A has an8-microsecond space. The ISLS pulse (P2) is always2 microseconds after the P1 pulse.. The gain time control (GTC) trigger, whichinitiates the receiver gate and the GTC circuits in thereceiver-transmitter.. The ISLS control gate, which controlsswitching of the antenna pattern for ISLS purposes.The ISLS control gate, which precedes the P2ISLS pulse by about 0.6 microsecond, is applied tothe switch amplifier. When triggered by theinterrogation trigger, the receiver-transmittergenerates RF pulses at the transmitting frequency of1030 MHz at a nominal peak power level of 2 kW.These pulses are applied to the sum channel of theswitch-amplifier. The difference channel pathbetween the receiver-transmitter and theswitch-amplifier is not used during transmission.When the ISLS control gate is not present at theswitch-amplifier, the RF pulses from the RT sumchannel are passed straight to the antenna via the sumchannel line for radiation out of the sum antennapattern. This pattern is a main lobe with its axis alongthe antenna’s boresight, and small side lobes on eitherside of the boresight. The P1 and P3 interrogationpulses are radiated in the sum pattern.When the ISLS gate arrives at theswitch-amplifier, shortly before the P2 pulse, the sumchannel input at the switch-amplifier is switched tothe difference channel coax to the antenna. Theswitch-amplifier amplifies the P2 ISLS pulse to anominal peak power of 8 kW prior to its being sent tothe antenna. This pulse is transmitted through thedifference antenna pattern, which is two main lobeswith their axes about 20 degrees on either side of theantenna’s boresight, with a minimum signal strengthalong the boresight.The reason for the two radiation patterns is tonarrow the antenna beamwidth effectively inconjunction with the operation of the ISLS circuit atthe transponder. The IFF transponder responds onlyto the P1 and P3 interrogation pukes, which are atleast 9 dB above the P2 pulse. The transponder willnot respond if the P2 pulse level exceeds the P1 level.If an IFF transponder is located more than a smallangle off of the antenna’s boresight, the P2 pulse willbe received at a much higher level than the P1 and P3pulses, and no reply will be generated.MODE 4 TRANSMISSION.— Mode 4 operationis very similar to that of modes 1,2, and 3/A. Themajor difference is that the KIR-1A computergenerates the interrogation trigger, GTC trigger, andthe ISLS control gate instead of the synchronizer.The synchronizer generates a mode 4 pretrigger that issent to the computer. The computer then prepares thechallenge video, which is sent back to thesynchronizer for entry onto the interrogator triggerline to the RT. Mode 4 transmission is the same as inthe other modes as far as the patterns are concerned.Both the sum antenna pattern and the differenceantenna pattern are used.RECEPTION.— During reception, both the sumand difference antenna patterns are open for IFFtransponder reply energy. The purpose of this is toeffectively narrow the reply reception antennabandwidth. This function is called RSLS. The replyRF energy is applied to the receiver-transmitter viathe switch-amplifier’s sum and difference channels.If the energy is above maximum receiver sensitivity,and the sum channel energy is greater than thedifference channel energy by a fixed factor, thereceiver will develop video pulses for decoding.These video pulses are applied to the mode 4decoding circuits within the receiver-transmitter andto modes 1, 2, and 3/A decoding circuits in thesynchronizer. For modes 1, 2, and 3/A, the videopulses are checked for the presence of the standardIFF reply bracket pulses spaced 20.3 microsecondsapart. If these pulses are there, a single video pulse isapplied to the radar set for display. The coded pulsesbetween the brackets are checked against the codeselected at the IFF interrogator control. If the codesmatch, another single display video pulse is applied tothe radar set for display. This second pulse is delayed12 microseconds (or 28 microseconds if thelong-range display is enabled) from the first pulse.When the correct code challenge is used to initiate theinterrogation, the first pulse (bracket decode) is notsent to be displayed.3-22
In mode 4, the reply video pulse is checked by theRT for proper pulse spacing and width. A single replypulse is forwarded to the computer for furtherdecoding. The mode 4 decoded video is applied to thesynchronizer, where two pulses spaced 12 or 28microseconds apart are generated for display by theradar set.PERFORMANCE MONITORING.— The IFFinterrogator set includes performance monitoringcircuits in each of the boxes. When a fault is detected,a signal is sent through the synchronizer to the controlbox. This signal will cause a FAULT light toilluminate instead of the normal CHAL light.When the TEST-CHAL CC switch is set to TEST,the IFF interrogator and the IFF transponder arelinked together. This is done by disabling the normalsuppression, ISLS, and RSLS operations. The triggertiming is also modified to place the zero-range repliesat approximately 4 nautical miles on the radar display.In this configuration, the two sets are checked by eachother for proper performance.REVIEW QUESTIONSQ1. What type of search radar is the APS-115B?Q2. What is the tilt range of the AS-2146/APS-115?Q3.Q4.Q5.Q6.Q7.Q8.Q9.Q10.Q11.Q12.Q13.Q14.Which control switch on the C-7511A/APS-115 is used to select the antenna sectormode?How many functional subsections are in aRT-889/APS-115?What is the scan rate of the AS-2146/APS-115in the long pulse mode of operation?How many operating modes are available onthe 11D13A?What is the minimum range in fire controloperations?In the fire control (automatic search) mode,what name is given to the 1/4-inch scan line?At what closing rate will lock on be lost in thefire control (automatic track) mode?What indication on the scope indicatesbreakaway?What are the five modes used in IFF operations?What antenna(s) is/are used by the IFFtransponder system?The APX-76 interrogator uses what carrierfrequency for transmission?What light illuminates when one of theAPX-76 components fail?3-23
CHAPTER 4ANTISUBMARINE WARFAREThe detection of enemy submarines is one of theNavy’s major problems today. There are many typesof equipment in use that aid in the detection andtracking of submarines. As an aviation electronicstechnician, you will need to understand the principlesused in these equipments. Once again, every effort ismade to discuss as many different platforms andequipments as possible.SONAR PRINCIPLESLearning Objective: Identify factors thataffect the behavior of a sound beam in water.The word sonar is derived from the initial lettersof SOund, NAvigation, and Ranging. The word sonaris used to describe equipment that transmits andreceives sound energy propagated through water.Airborne sonar equipment is commonly called“dipping sonar,” and is used aboard varioushelicopters. Sonobuoys, also a form of sonar, will bediscussed later in this chapter.The operating principles of sonar are similar tothat of radar, except sound waves are used instead ofradio frequency waves. When the sound wave strikesan object, some of the energy reflects back to thesource from which it came. Since the speed of thesound wave and the time it takes to travel out andback are known, range can be determined. Byknowing the direction from which the sound echo isreflected, the operator can determine the bearinginformation.is a watertight unit that is used to convert electricalenergy into acoustical energy and acoustical energyback into electrical energy. The transducer acts like aloudspeaker in an office intercom system, alternatelyconverting electrical energy into mechanical energyand mechanical energy into electrical energy. Thetransducer acts like an underwater loudspeaker duringtransmission and an underwater microphone duringreception. The sound waves produced by a sonartransducer are represented by the circular lines shownin figure 4-1. Refer to this figure as you read thefollowing text.When the diaphragm of the transducer movesoutward, it moves the water next to the diaphragm.This produces a high-pressure area or compression inthe water. When the diaphragm of the transducermoves inward, the water next to the diaphragm movesinward. Thus, a low-pressure or rarefaction isproduced in the water. As long as the diaphragm isvibrating, alternate compressions and rarefactionstravel outward from the transducer in the water. Thedistance between two successive rarefactions or twosuccessive compressions is the wavelength of theThe type of sonar equipment that dependsprimarily on a transmitted sound wave and thereception of an echo to determine range and bearingof a target is known as echo-ranging or active sonarequipment. Another type of sonar equipment isreferred to as listening or passive sonar. This type ofsonar uses the target as the sound source. Althoughmost sonar equipment can be used in either mode ofoperation, surface ships and aircraft generally use theactive mode, and submarines use the passive mode.In echo-ranging sonar equipment, the source ofthe sound wave is a transducer. The sonar transducerFigure 4-1.-Sound waves produced in water by a transducer.4-1
sound wave. The frequency (in hertz) of the soundwave is the number of wavelengths that occur everysecond.FACTORS AFFECTING THE SOUNDBEAMThe particular sound waves of interest to thesonar operator are the waves that leave the sonartransducer in the form of a beam and go out into thewater in search of a submarine. If the sound beamfinds a target, it will return in the form of an echo.The use of sonar equipment depends on thepresence and the recognition of an echo from a target.Detection of the echo depends on the quality andrelative strength (loudness) of the echo compared tothe strength and character of other sounds, since theytend to mask or cover it.The sonar operator should know what factors canweaken the sound beam as it travels through water,what factors in the seawater determine the path andspeed of the sound beam, and what factors affect thestrength and character of the echo. Any signalstrength lost during the beam’s travel through thewater is known as “transmission loss.” Some of thefactors determining transmission loss are discussed inthe following paragraphs.Absorption and ScatteringSome of the sound energy emitted by the sourcewill be absorbed while passing through the water.The amount absorbed this way depends on the seastate. Absorption is high when winds are greatenough to produce whitecaps and cause aconcentration of bubbles in the surface layer of thewater. In areas of wakes and strong currents, such asriptides, the loss of sound energy is greater.Therefore, echo ranging through wakes and riptides isdifficult because of the combined effect of falseechoes, high reverberations, and increased absorption.Absorption is greater at higher frequencies thanat lower frequencies.Sound waves are weakened when they reach aregion of seawater that contains foreign matter, suchas seaweed, silt, animal life, or air bubbles. Thisforeign matter scatters the sound beam and causesloss of sound energy. The practical result ofscattering is to reduce echo strength, especially atlong range.ReflectionEchoes occur when the sound beam hits an objector a boundary region between transmission mediumsin such a manner as to reflect the sound or to throw itback to its origin. Reflection of sound wavessometimes happens when a wave strikes a medium ofdifferent density from that through which it has beentraveling. This will occur in cases where the twomediums are of sufficiently different densities, andthe wave strikes at a large angle. This happensbecause the sound wave travels at different speedsthrough the two different densities. For example, asound wave traveling through seawater is almostentirely reflected at the boundary of the water and air.The speed of sound in seawater is about four timesgreater than the speed of sound in air, and the densityof water is more than 800 times greater than that ofair. Therefore, practically all of the sound beam willbe reflected downward from the sea surface.Similarly, when a sound wave traveling throughthe seawater strikes a solid object like a submarine,the difference in the density and the sound velocity inthe two mediums is such that all but a small amount ofthe sound beam will be reflected. That portion of thebeam that strikes surfaces of the submarineperpendicular to the beam will be reflected directlyback to the origin as an echo.In calm seas, most of the sound energy that strikesthe water surface from below will be reflected backdown into the sea. A scattering effect occurs as thesea gets progressively rougher. In thesecircumstances, part of any sound striking the surfaceis lost in the air, and part is reflected in scatteringdirections in the sea. In water less than 600 feet deep,the sound may also be reflected off the bottom. Otherfactors being equal, the transmission loss will be leastover a smooth, sandy bottom and greatest over softmud. Over rough and rocky bottoms, the sound isscattered, resulting in strong bottom reverberations.ReverberationWhen sound waves echo and re-echo in a largehall, the sound reverberates. Reverberations aremultiple reflections. Lightning is an example of thisfrom nature. When lightning discharges, it causes aquick, sharp sound; but by the time the sound of thethunder is heard, it is usually drawn out into aprolonged roar by reverberations.4-2
A similar case often arises in connection withsonar. Sound waves often strike small objects in thesea, such as fish or air bubbles. These small objectscause the waves to scatter. Each object produces asmall echo, which may return to the transducer. Thereflections of sound waves from the sea surface andthe sea bottom also create echoes. The combinedechoes from all these disturbances are called“reverberations.” Since they are reflected fromvarious ranges, the y seem to be a continuous sound.Reverberations from nearby points may be so loudthat they interfere with the returning echo from atarget.There are three main types of reverberation, orbackward scattering of the sound wave. They are asfollows:1. There is reverberation from the mass of water.Causes of this type of reverberation are notcompletely known, although fish and other objectscontribute to it.2. There is reverberation from the surface. Thisis most intense immediately after the sonartransmission; it then decreases rapidly. The intensityof the reverberation increases markedly withincreased roughness of the sea surface.3. There is reverberation from the bottom. Inshallow water, this type of reverberation is the mostintense of the three, especially over rocky and roughbottoms.DivergenceJust as the beam from a searchlight spreads outand becomes weaker with distance, so does sound.The farther the target is from the sonar transducer, theweaker the sound waves will be when they reach it.This is known as spreading or divergence.RefractionIf there were no temperature differences in thewater, the sound beam would travel in a straight line.This happens because the speed of sound would beroughly the same at all depths. The sound beamwould spread and become weaker at a relativelyconstant rate.Unfortunately, the speed of sound is not constantat all depths. The speed of sound in seawaterincreases from 4,700 feet per second to 5,300 feet persecond as the temperature increases from 30°F to85°F. Salinity and pressure effects on sound speedare not as extreme as the large effects produced bytemperature changes in the sea. Because of thevarying temperature differences in the sea, the soundbeam does not travel in a straight line, but followscurved paths. This results in bending, splitting, anddistorting of the sound beam.When the sound beam is bent, it is said to berefracted. A sound beam is refracted when it passesfrom a medium of a given temperature into a mediumwith a different temperature. An example of this is asound beam traveling from an area of warm water intoan layer of cold water. The sound beam will bendaway from the area of higher temperature (highersound velocity) toward the lower temperature (lowersound velocity).As a result of refraction, the range at which asubmarine can be detected by sound may be reducedto less than 1,000 yards, and this range may changesharply with changing submarine depth.Speed of the Sound BeamAs mentioned previously, sound travels muchfaster in seawater than in the atmosphere. Near sealevel, sound travels through the atmosphere atapproximately 1,080 feet per second. In seawater,that same sound beam will travel at approximately4,700 to 5,300 feet per second.There are three main characteristics of seawaterthat affect the speed of the sound wave travelingthrough it. These characteristics are as follows:1. Salinity (the amount of salt in the water)2. Pressure (caused by increased depth)3. Temperature (the effect of which is calculatedin terms of slopes, or gradients)There is a high mineral content in seawater. Thedensity of seawater is approximately 64 pounds percubic foot, while fresh water has a density of about62.4 pounds per cubic foot. This difference is causedby the salt in the seawater. Salt content in seawater iscalled the salinity of water.The overall effect of increasing the salinity is anincrease in the speed of the sound beam in the water.This means that as the sound travels through water ofvarying salinity, it travels faster through the waterwith more salt content. Such a change in salinity isconsiderable at the mouth of a river emptying into thesea. Elsewhere, the difference in salinity is too small4-3
to affect the rate of travel of the sound beamsignificantly, and may be ignored.Since sound travels faster in water under pressure,the speed of sound in the sea increases proportionallywith depth. This difference in speed is also very smalland has little effect for the operator.Temperature is the most important of the factorsaffecting the speed of the sound beam in water. Thespeed will increase with increasing temperature at therate of 4 to 8 feet per second per degree of change,depending on the temperature.The temperature of the sea varies from freezing inthe polar seas to more than 85°F in the tropics. Thetemperature can also decrease by more than 30°Ffrom the surface to a depth of 450 feet. Thus, thetemperature is the most important factor because ofthe extreme differences and variations. Remember,the speed of sound in water increases as thetemperature increases.Depth and TemperatureExcept at the mouths of great rivers where salinitymay be a factor, the path of the sound beam will bedetermined by the pressure effects of depth and bytemperature. The pressure effect is always presentand always acts in the same manner; it tends to bendthe beam upwards. Figure 4-2 illustrates the situationwhen the temperature does not change with depth.Even though the temperature does not change, thespeed of the sound increases with depth. The speedincrease is due entirely to the effect of pressure.Notice in figure 4-2 that the sound beam bendsupward.Figure 4-3 shows what happens when temperatureincreases steadily with depth. When the surface ofthe sea is cooler than the layers beneath it, thetemperature increases with depth, and the water has apositive thermal gradient. This is an unusualcondition, but when it does happen, it causes thesound beam to be refracted sharply upwards.When the sea gets colder as the depth increases,the water has a negative thermal gradient. In thissituation, the effect of temperature far outweighs theeffect of depth, and the sound beam is refracteddownward.If the temperature remains the same throughoutthe water, the temperature gradient is isothermalFigure 4-2.-Bending of a sound beam away from ahigh-pressure area.Figure 4-3.-The effect of a positive thermal gradient.4-4
thermal gradient condition, the layer depth is thedepth of maximum temperature. Above layer depth,the temperature may be uniform, or a weak positive ornegative gradient may be present.Layer effect is the partial protection from echoranging and listening detection, which a submarinegains when it submerges below layer depth. Reportsfrom surface vessels indicate that effective ranges onsubmarines are greatly reduced when the submarinedives below a thermocline, and that the echoesreceived are often weak and sound “mushy.”Figure 4-4.-Isothermal conditions.(constant temperature). Refer to figure 4-4 as youread the following text. The surface layer of water inthe figure is isothermal, but beneath this layer thetemperature decreases with depth. This causes thesound beam to split and bend upward in theisothermal layer and downward below it.Remember, when no temperature differenceexists, the sound beam refracts upward due topressure. When the temperature changes with depth,the sound beam bends away from the warmer water.Under normal conditions the sea’s temperaturestructure is similar to that shown in figure 4-5. Thisstructure consists of three layers as follows:1. A surface layer of varying thickness withuniform temperature (isothermal) or a relatively slighttemperature gradient.2. The thermocline, which is a region ofrelatively rapid decrease in temperature.3. The rest of the ocean, with slowly decreasingtemperature down to the sea floor.If this arrangement changes, the path of the soundbeam through the water will change.Layer depth is the depth from the surface to thetop of a sharp negative gradient. Under positiveFigure 4-5.-Normal sea temperature structure.4-5
DOPPLER EFFECTWhen there is relative motion between the sourceof a wave of energy and its receiver, the receivedfrequency differs from the transmitted frequency.When the source of wave motion is moving towardsthe receiver, more waves per second are received thanwhen the source remains stationary. The effect at thereceiver is an apparent decrease in wavelength and,therefore, an increase in frequency. On the otherhand, when the source of wave motion is movingaway from the receiver, fewer waves per second areencountered, which gives the effect of a longerwavelength and an apparent decrease in frequency.This change in wavelength is called the “Dopplereffect.” The amount of change in wavelengthdepends on the relative velocity between the receiverand the source. Relative velocity is the resultantspeed between two objects when one or both aremoving.You have heard the term Doppler effect manytimes, but may not have known what the phenomenonwas. An example of this is what you hear at a railroadcrossing. As a train approaches, the pitch of thewhistle is high. As the train passes you, the pitchseems to drop. Then, as the train goes off in thedistance, the pitch of the whistle is low. The Dopplereffect causes the changes in the pitch.Sound waves generated by the whistle werecompressed ahead of the train. As they came towardyou, they were heard as a high-pitched sound becauseof the shorter distance between waves. When thetrain went by, the sound waves were drawn out,resulting in the lower pitch. Refer to figure 4-6 as youread the following explanation of Doppler effect.If you examine 1 second of the audio signalradiated by the train whistle, you will see that thesignal is composed of many cycles of acousticalenergy. Each cycle occupies a definite period of timeand has a definite physical wavelength. (Because ofspace limitations, only every 10th wave is illustratedin view A of figure 4-6.) When the energy istransmitted from a stationary source, the leading edgewill move out in space the distance of one wavelengthby the time the trailing edge leaves the source. Thecycle will then occupy its exact wavelength in space.If that cycle is emitted while the source is moving, thesource will move a small distance while the completecycle is being radiated. The trailing edge of the cycleradiated will be closer to the leading edge.Figure 4-6, view B, shows the effect of relativemotion on a radiated audio signal. Notice thewavelength of the sound from the stationary emitter,as illustrated in condition (1) of view B.In condition (2) of view B, the emitter is movingtowards the listener (closing). When the cycle iscompressed, it occupies less distance in space. Thus,the wavelength of the audio signal has beendecreased, and the frequency has beenproportionately increased (shifted). This apparentincrease in frequency is known as UP Doppler.The opposite is true in condition (3) of view B.The emitter is moving away from the listener(opening). The wavelength occupies more distance inspace, and the frequency has been proportionatelydecreased. This apparent decrease in frequency isknown as DOWN Doppler. The factors thatdetermine the amount of Doppler shift are the velocityof the sound emitter, the velocity of the receiver, andthe angle between the direction of motion of thereceiver and the direction of motion of the soundemitter. This angle, known as angle 8, is used in aformula to determine the velocity of the emittedsignal at the receiver and the frequency of the Dopplershift.The Doppler shift works both ways. If you wereon the train and had listened to a car horn at thecrossing, the pitch of the horn would have changed.The effect is the same because the relative motion isthe same.The sonar equipment deals with three basicsounds. One of these sounds is the sound actuallysent out by the equipment. The second sound is thereverberations that return from all the particles in thewater—seaweed, fish, etc. The third sound is themost important one, the echo from the submarine.The sound sent into the water (the actual ping) isseldom heard by the operator. Most of the equipmentis designed to blank out this signal so that it doesn’tdistract the operator. This means there are only twosounds to deal within the discussion of Doppler effectin sonar.Reverberations are echoes from all the smallparticles in the water. Consider just one of theseparticles for a moment. A sound wave from thetransducer hits the particle and bounces back, just as aball would if thrown against a wall. If the particle isstationary, it will not change the pitch of the sound.The sound will return from the particle with the samepitch that it had when it went out.4-6
If the sonar transducer is stationary in the waterand sends out a ping of 10 kHz, the particles all sendback a sound that has the same pitch. Now supposethat the transducer acquires forward motion and aping is sent out dead ahead. It is just as if thetransducer were the oncoming train, and the particleswere occupants of the car. Remember, that as thetrain came forward, the pitch of the whistle soundedhigher to the occupants of the car. In the same way,the particles “hear” a higher note and reflect thishigher note. Therefore, the sonar equipment willdetect a higher note than the one sent out. If thetransducer in this example is pointed dead astern, alower note than the one sent out will be heard.Figure 46-Doppler effect. A. One-second audio signal. B. One sine wave of the audio signal.4-7
Figure 4-7.-Transducer installed on a moving ship.If the transducer is aimed perpendicular to thedirection of motion, the particles in the water willecho the same note sent out because the transducer isneither going toward the particles nor away fromthem. (See figure 4-7.)Now consider the echo from the submarine,shown in figure 4-8. Again, the transducer is shownstationary. When the submarine is neither goingtoward nor away from the transducer, it must be eitherstopped or crossing the sound beam at a right angle.If it is in either condition, it reflects the same sound asthe particles in the water. Consequently, thesubmarine echo has exactly the same pitch as thereverberations from the particles.Figure 4-9.-Comparison of echo frequency and reverberationfrequency when submarine moves toward transducer.Suppose that the submarine is going toward thetransducer, as shown in figure 4-9. It is as though thesubmarine is the train heading toward the car that isblowing its horn at the crossing. The horn soundshigher as the train approaches the car. In the samemanner, the sound beam sounds higher to thesubmarine as it approaches the transducer.Figure 4-8.-Transducer supported by helicopter. Dopplereffect is absent when submarine is stationary or moves atright angles to sound beam.Figure 4-10.-Comparison of echo frequency andreverberation frequency when submarine moves awayfrom transducer.4-8
The submarine reflects an echo of higher pitchthan that caused by the particles in the water, whichare not moving. When the echo from the oncomingsubmarine is higher in frequency than the echoes fromthe reverberations, the Doppler is high. The oppositeform of Doppler shift will occur when the submarineis heading away from the transducer. In this case, thepitch of the echo is lower than the pitch of thereverberations. (See figure 4-10.)The degree of Doppler indicates how rapidly thesubmarine is moving relative to the transducer. Forexample, a submarine moving directly toward thetransducer at 6 knots returns an echo of higherfrequency than one moving at only 2 knots. Also, asubmarine moving at 6 knots directly at the transducerreturns an echo of higher frequency than one movingonly slightly at the transducer. Refer to figure 4-11.This figure shows 12 submarines traveling at variousspeeds and courses with respect to a stationarytransducer supported by the helicopter. Notice howthe Doppler of each submarine is influenced by itsspeed and direction.Doppler also makes it possible to distinguish thedifference between a wake echo and a submarineecho. Relatively speaking, the submarine’s wake isstationary. Therefore, its wake returns an echo with afrequency different from that of the Doppler shiftedsubmarine echo.AIRBORNE SONAR SYSTEMLearning Objective: Recognize componentsand operating principles of an airbornesonar system.Figure 4-11-Varying degrees of Doppler effect due to differences in course and speed of submarines.4-9
The Sonar Detecting-Range Set AN/AQS-13E isa lightweight, echo-ranging, dipping sonar set. It iscapable of detecting, tracking, and classifying movingand stationary underwater objects. Also, this sonarset provides capabilities for underwater voicecommunication and generation of echo-ranging,aspect, and bathythermographic recordings.MAJOR COMPONENTSThe following text will discuss the variouscomponents that makeup the AN/AQS-13E sonardetecting-range set.Azimuth and Range IndicatorThe azimuth and range indicator (fig. 4-12) ispositioned at the sensor station. It provides the meansfor the operator to track targets. There are fourcontrols on the left hand side of the indicator foroperator comfort. The CURSOR INTENSITY switchcontrols the brightness of the cursor. The CRTINTENSITY controls the brightness of the overallCRT. The VIDEO GAIN controls the level of thevideo signal applied to the CRT. The AUDIO GAINswitch controls the level of the audio signal.The right side of the indicator face contains ameter called the RANGE RATE-KNOTS meter. Thismeter displays the opening or closing speed of theselected target. The MTI THRESHOLD switchselects the range rate threshold of targets to bedisplayed on the CRT. The DISPLAY switch selectseither sonobuoy signals or sonar signals to be shownon the CRT. To activate the sonar set, press thePOWER switch. This activates the entire system withthe exception of the dome control. The TEST switchinitiates the built-in test functions and analyzes theresults.Bearing and Range IndicatorThe bearing and range indicator (fig. 4-13) ismounted on the instrument panel, and presents thepilot with target bearing and range information. Thisinformation is supplied when the sonar operator setsthe receiver TARGET switch to VERIFY.The bearing is displayed on a three-digit displaythat shows degrees magnetic. The range is displayedon a five-digit display that shows yards to target.There is also a dimmer switch that controls theintensity of the display illumination.Cable Assembly and ReelThe special purpose cable is 500±5 feet long, andis pretensioned on the reel. The cable contains 30shielded conductors in a braided steel strengthmember, and is protected by a waterproof outercovering of polyurethane. There are colored bandsspaced along the length of the cable to aid in checkingthe amount of cable payed out.Dome ControlThis control box (fig. 4-14) allows the operator toraise and lower the transducer (dome). There arethree switches and two indicators on the face of thiscontrol box. The DEPTH-FEET indicator advises theoperator on how far the transducer is lowered in feet.Figure 4-12.-Azimuth and range indicator.Figure 4-13.-Bearing and range indicator.4-10
RecorderThe RO-358/ASQ-13A recorder (fig. 4-16) islocated at the sensor operator’s station and displaysinformation on chart paper. This recorder is used forboth the sonar system and the magnetic anomalydetection (MAD) system. MAD will be discussedlater in this chapter.Figure 4-14.-Dome control.The TRAIL/UNSEATED indicator advises theoperator of the transducer’s position.The RAISE/LOWER switch activates the reelingmachine to either raise or lower the dome. The SEATs witch/indicator is used to raise the transducer fromthe trail position to the seat position, and thenindicates that the transducer is in the seat position.When the operator selects the AUXILIARY RAISEswitch, the transducer will be electrically raised in theevent of a hydraulic malfunction.Hydraulic Cable Reeling MachineThe recorder contains the following switches andindicators on its faceplate: The CHART MOVEswitch provides for rapid chart movement. TheMODE switch selects the mode in which the recorderwill operate. The RANGE RATE switch compensatesfor target range rate when in the aspect mode. APULSE switch enables the operator to select transmitpulse duration while in the aspect mode. TheCONTRAST control allows the operator to controlthe intensity of the recorded trace, while thePATTERN SHIFT knob shifts the information to theleft. The SAD indicator/switch indicates when a SADsignal is being processed, and it resets the SADindication. The REFERENCE switch enables theoperator to select a new stylus during MADoperations.Sonar Hydrophone and Sonar ProjectorThe underwater transmitting and receivingelement consists of a projector (transmitting array)and a hydrophone (receiving array). The combinationof these two components, which are electrically andThe hydraulic cable reeling machine (fig. 4-15)uses a hydraulic motor to raise and lower the dome.The sequence of raising or lowering is accomplishedby energizing solenoids on the hydraulic controlpackage, which programs hydraulic pressure torelease or retrieve the dome.The reel rotates to pay out or retrieve the cable.As the cable goes out or comes in, a level windassembly, mounted on the frame, moves laterally towind or unwind the cable evenly. The level wind ischain-driven from the gearbox assembly.A standard one-half inch, square-drive speedwrench, which comes with the reeling machine, canbe used to manually release or retrieve the cable.When the handcrank is used, the electrical circuits aredisabled.Figure 4-15.-Hydraulic cable reeling machine.4-11
Figure 4-16.-RO-358/ASQ-13A.mechanically connected, is referred to as the DOME(fig. 4-17).The projector assembly of the dome contains aprojector, a flux gate compass, and a pressurepotentiometer. The projector is composed of sixmatched ceramic rings (barium titanate) and a tuningtransformer. The projector converts the electricalpulses from the sonar transmitter to acoustic pulsesthat are radiated in an omnidirectional pattern throughthe water. The flux gate compass forms a portion ofthe display stabilization loop, providing an output to4-12
Figure 4-17.-Hydrophone and projector.Figure 4-18.-Sonar receiver.indicate the sonar dome azimuth deviation frommagnetic north. The pressure potentiometer providesan output to indicate depth of the dome in water. Theprojector is covered with a black neoprene boot that isfilled with oil.The hydrophone assembly consists of 16 staveassemblies bolted to a cork-lined fiber glass barrel, anend bell, a temperature sensor, and an electronicpackage. The staves, filled with oil and hermeticallysealed, convert the received acoustic pulses tolow-level ac signals. These signals are amplified andapplied through the special purpose electrical cable tothe receiver located in the helicopter. The stavehousings are stainless steel, each containing 12matched ceramic rings with trimming capacitors, andthey are mounted on a printed-circuit board. Theoutput of each stave is applied to a preamplifier,which is on the electronics package. A temperaturesensor for measuring temperature of the water islocated on the end bell.The dome requires no adjustments. All inputs andoutputs are made through the special electricalconnector on top of the electronic housing.4. A dual CURSOR POSITION control forcontrolling the cursor circle on the CRT in bothazimuth and range.5. A three-digit BEARING display that indicatescursor circle bearing in degrees from magnetic north.6. A five-digit RANGE-YARDS display thatindicates the range of the cursor circle in yards.7. An AUDIO switch/indicator for selectingaudio from all eight sectors, or only the sectorselected by the cursor circle position.8. A TARGET switch/indicator for applyingbearing and range information to the pilot’s bearingand range indicator.Sonar TransmitterThe transmitter (fig. 4-19) develops the signals tobe transmitted by the system. A POWER circuitbreaker, located on the front cover of the transmitter,Sonar ReceiverThe sonar receiver (fig. 4-18) consists of allelectronic circuits required for the processing of inputsignals of the sonar set.The following switches and indicators aremounted on the front panel of the receiver:1. A RANGE SCALE-KYDS switch forselecting the desired operating range.2. A MODE switch for selecting the operatingmode of the sonar.3. A FREQUENCY switch for selecting thedesired frequency.Figure 4-19.-Sonar transmitter.4-13
applies 115 volts ac to the transmitter. When highvoltage is being used, the HV indicator will be lit,The READY indicator shows when the transmitter isready for operation. There are also STANDBY andFAULT indicators to show when there is amalfunction in the transmitter.Sonar Data ComputerThe sonar data computer is used with the sonar setto provide processing and display of LOFAR, DIFAR,and CASS sonobuoy signals on the sonar’s CRT.These sonobuoys will be discussed later in thischapter. The sonar data computer is also used toprovide a more accurate fix on the target by providinga digital readout of target range, speed, and bearing.MODES OF OPERATIONThe sonar set provides three operational modes ofoperation: echo ranging (LONG and SHORT),PASSIVE, and COMM. A fourth mode, TEST, isused to determine that the sonar set is in operationalstatus. Three recording modes are also available:low (25°F to 75°F) or high (45°F to 95°F) BT(bathythermograph), RANGE, and ASPECT. Afourth recording mode, TEST, is used to determinethat the recorder is in operational status.Echo-Ranging ModeThe sonar set produces recurrent 3.5- (SHORT) or35- (LONG) millisecond acoustic pulses that areradiated through the water from the projector portionof the dome. Returning target echoes are received bythe hydrophone and processed into a left and righthalf-beam for each sector. Target bearing isdetermined by the phase difference existing betweenthe left and right half-beams formed for each sectorseamed. Bearing of the target is resolved from theedge of each of the eight 45-degree sectors scanned.Target range is determined from the elapsed timebetween transmission of a given pulse and the returnof the target echo. Target and range are presentedsimultaneously as a single target pip on the CRT.Variations of the speed of sound in water due to thetemperature of the water surrounding the dome arecompensated for automatically.An audio signal is developed for each returningtarget echo. These audio signals are applied to thehelicopter’s intercommunication system in such amanner that signals representing the left four sectorsof the CRT are applied to the left earphone, and thesignals for the right four are applied to the rightearphone. A different nonharmonic tone is generatedfor each of the four sectors in each CRT half when theAUDIO switch is in the ALL position. In the ONEposition, the audio representing the CRT sector inwhich the cursor is positioned is applied to bothearphones.The nature of the object causing the echo can bedetermined by the outline and intensity of the targetdisplay on the CRT, as well as by the quality andintensity of the audio. The opening or closing speedof the target within the cursor circle is displayedautomatically on the RANGE RATE-KNOTS meter.Passive ModeIn the passive mode, active echo-ranging isdisabled, and underwater sounds may be received anddisplayed on the CRT. Bearing information ispresented in this mode of operation and appears in theform of a noise spoke on the CRT. Audio is presentedin the same manner as in the echo-ranging mode.Communication ModeThe COMM mode is used for two-way underwatervoice communication with other appropriatelyequipped helicopters, ships, or submarines operatingwithin range.Voice communication operation is activated byplacing the MODE switch to COMM. Voicetransmission is accomplished by depressing a footswitch and speaking into the microphone. Releasingthe foot switch permits monitoring voice signals fromother similar underwater communications systems.When the audio switch is set to ONE, reception ofunderwater voice signals is accomplished by placingthe cursor circle in the CRT sector in which the noisespoke appears and by regulating the AUDIO GAINcontrol.Test ModesThe test modes check the operational status of thesystem as a whole and the various components of thesystem as individual units. These test modes useinternally generated signals.During normal operation, the test circuits samplemajor system functions and voltages. If a sampledfunction exceeds preset limits, the FAULT indicatorilluminates for the length of time that the fault exists.Recorder Bathythermographic ModeThe recorder bathythermographic (BT) mode isused to obtain graphs of temperature gradientsappearing beneath the surface of the surroundingwater to depths of 450 feet. Temperature and depthsignals obtained from the dome are processed by thereceiver and dome control. These signals are appliedto the recorder circuits when the recorder MODE4-14
selector switch is moved to the BT position. Therecorder chart drive circuits automatically positionthe chart paper to provide correct chart registration.Recorded scale marks on the chart paper denote thetemperature scale being used for each temperaturerecording. The recorder plots temperature on thevertical axis and depth on the horizontal axis of themoving chart.Recorder Range ModeThe recorder RANGE mode is used to obtaincontinuous strip-chart displays of target echo ranges.Range scale control signals from the receiver RANGESCALE-KYDS switch are accepted by the recordersweep circuits to correlate the range sweeps. As thechart paper moves, range scale marks are recorded onthe chart paper to denote the range scale being usedfor each range recording. Target echo video signalsare applied to the styluses when they appear in time,as related to the range sweep. The video signals arerecorded each time a stylus passes over the rangeposition of a target. The chart advances a smallincrement for each stylus sweep.Recorder Aspect ModeThe recorder ASPECT mode is used to obtaincontinuous strip-chart displays of target echo signals.Timing and control signals, generated within therecorder, slave the receiver timing circuits to alternatesweep ramps between transmit and receive cycles.During each transmit sweep ramp, a train of shortkeying pulses is generated, and pulsewidth isregulated in the recorder. This pulse train is appliedto the receiver. During each receive sweep ramp, thetrain of received target echo video pulses is applied tothe recorder styluses. Target echo signal level isneither limited nor affected in the system. Thispermits varying intensity recordings (highlights) oftarget structural characteristics for optimum targetclassification.Recorder Test ModeThe sonar operator uses the recorder TEST modeto check the operational status of the recorder. TheTEST mode effectively checks the operation of therecorder stylus drive, stylus write, and chart driveoperations. In addition, all front panel controls on therecorder can be checked by the operator foroperational compliance and accuracy.MAGNETIC ANOMALY DETECTIONLearning Objective: Recognize componentsand operating principles of magneticanomaly detection (MAD).By the beginning of World War II, it had becomeapparent that the aircraft was a deadly antisubmarineweapon. This was true even though the ability tosearch and detect submarines was solely dependent onvisual sightings. The development of radar extendedthe usefulness of airborne antisubmarine measures,making detection of submarines possible at night orunder conditions of poor visibility. However, visualor radar detection was possible only when thesubmarine was surfaced. Thus, some method ofdetecting submerged subs from an aircraft wasneeded. The use of sonar wasn’t feasible becausethere was no direct contact between the fast-movingaircraft and the surface of the water. The mostfeasible way of detecting a submerged submarine wasto detect its disturbance of the local magnetic field ofthe earth.PRINCIPLES OF MAGNETIC DETECTIONLight, radar, and sound energy cannot pass fromair into water and return to the air in any degree that isusable for airborne detection. On the other hand,lines of force in a magnetic field are able to make thistransition almost undisturbed because the magneticpermeability of water and air are practically the same.Specifically, the lines of force in the earth’s magneticfield pass through the surface of the ocean essentiallyundeviated by the change of medium, andundiminished in strength. Consequently, an objectunder the water can be detected from a position in theair above if the object has magnetic properties thatdistort the earth’s magnetic field. A submarine hassufficient ferrous mass and electrical equipment tocause a detectable distortion (anomaly) in the earth’sfield. The function of the MAD equipment is todetect this anomaly.Magnetic AnomalyThe lines comprising the earth’s natural magneticfield do not always run straight north and south. Iftraced along atypical 100-mile path, the field twists atplaces to east and west, and assumes different angleswith the horizontal. Angles of change in the east-westdirection are known as angles of variation, whileangles between the lines of force and the horizontal4-15
are known as angles of dip (fig. 4-20). At any givenpoint between the equator and the magnetic poles, therelationship of the angle between the earth’s surfaceand the magnetic lines of force is between 0° and 90°.This angle is determined by drawing an imaginaryline tangent to the earth’s surface and to the line offorce where it enters the earth’s surface. The anglethus formed is called the DIP ANGLE.If the same lines are traced only a short distance,300 feet for instance, their natural changes invariation and dip over such a short distance(short-trace) are almost impossible to measure.However, short-trace variation and dip in the area of alarge mass of ferrous material, though still extremelyminute, are measurable with a sensitive anomalydetector. This is shown in figure 4-21. The dashedlines represent lines of force in the earth’s magneticfield.Figure 4-20.-Dip angles.View A shows the angular direction at whichnatural lines of magnetic force enter and leave thesurface of the earth. Note that the angles of dip areconsiderably steeper in extreme northern andsouthern latitudes than they are near the equator.View B represents an area of undisturbed naturalFigure 4-21.-Simplified comparison of natural field density and submarine anomaly.4-16
Figure 4-22.-Submarine's magnetic moment.magnetic strength. In views C and D, the submarine’smagnetic field distorts the natural field as shown. Thedensity of the natural field is decreased in view C andincreased in view D. The natural angle of dip is alsoaffected, but only very slightly.Submarine AnomalyThe maximum range at which a submarine maybe detected is a function of both the intensity of itsmagnetic anomaly and the sensitivity of the detector.A submarine’s magnetic moment (magneticintensity) (fig. 4-22) determines the intensity of theanomaly. It is dependent mainly on the submarine’salignment in the earth’s field, its size, the latitude atwhich it is detected, and the degree of its permanentmagnetization.MAD equipment, in proper operating condition, isvery sensitive; but the submarine’s anomaly, even at ashort distance, is normally very weak. The strength of acomplex magnetic field (such as that associated with asubmarine) varies as the inverse cube of the distancefrom the field's source. If the detectable strength of afield source has a given value at a given distance and thedistance is doubled, the detectable strength of the sourceat the increased distance will then be one-eighth of itsformer value. Therefore, at least two facts should beclear. First, MAD equipment must be operated at a verylow altitude to gain the greatest proximity possible tothe enemy submarines. Second, the searching aircraftshould fly at a predetermined speed and follow anestimated search pattern. This ensures systematic andthorough searching of the prescribed area so that noexisting anomalies are missed.Anomaly StrengthUp to this point, the inferred strength of asubmarine’s anomaly has been exaggerated forpurposes of explanation. Its actual value is usually sosmall that MAD equipment must be capable ofdetecting a distortion of approximately one part in60,000. This fact is made apparent by pointing outthat the direction of alignment of the earth’s magneticlines of force is rarely changed more than one-half of1 degree in a submarine anomaly.Figure 4-23, view A, represents a contour mapshowing the degree of anomaly caused by asubmarine. The straight line is approximately 800Figure 4-23.-A. Degree of anomaly. B. Anomaly stylus. C. Sample anomaly record.4-17
feet in length and represents the flight path of asearching aircraft through the area of the submarineanomaly. If the submarine were not present, theundisturbed magnetic intensity in the area due to itsassumed natural characteristics would be 60,000gammas. (The gamma is the measure of magneticintensity and is symbolized by the Greek letter γ.) Allvariations in the field, when the submarine is present,would then be above or below this natural intensity.Therefore, 60,000 gammas is the zero referencedrawn on the moving paper tape shown in view C offigure 4-23.Refer to view A of figure 4-23. Starting with theaircraft at point A, where the anomaly is undetectable,the earth’s field concentration decreases to anintensity of 2γ (59,998) at point B. Its intensity thenincreases until a peak value of +45γ is reached at pointC. From that point it decreases to zero at point D.After point D, another zone of what amounts tomagnetic rarefaction is encountered. The earth’s fieldis less intense than its normal value. Consequently,anomalous values in this zone are considered asminus quantities. A peak minus intensity is reached atpoint E, and thereafter the signal rises back to itsnormal, or undetectable, intensity at point F.As the varying degrees of intensity areencountered, they are amplified and used to drive aswinging stylus, as shown in figure 4-23, view B. Thetip of the stylus rides against the moving paper tape,leaving an ink trace. The stylus is swung in onedirection for positive γ, and the other for negative γ.The magnitude of its swing is determined by theintensity of the anomaly signal. Figure 4-23, view C,is a sample of paper recording tape showing theapproximate trace caused by the anomaly in view A.In the illustration just given, the search aircraft’saltitude was 200 feet. At a lower altitude the anomalywould have been stronger, and at a higher altitude, itwould have been weaker.MAGNETIC NOISEFor the purposes of this discussion, any noise ordisturbance in the aircraft or its equipment that couldproduce a signal on the recorder is classified as amagnetic noise.In an aircraft there are many sources of magneticfields, such as engines, struts, control cables,equipment, and ordnance. Many of these fields are ofsufficient strength to seriously impair the operation ofMAD equipment. Consequently, some means mustbe employed to compensate for “magnetic noise”fields. The noise sources fall into two majorcategories: maneuver noises and dc circuit noises.Maneuver NoisesWhen the aircraft maneuvers, the magnetic fieldof the aircraft is changed, causing a change in the totalmagnetic field at the detecting element. The aircraftmaneuver rates are such that the signals generatedhave their major frequency components within thebandpass of the MAD equipment. Maneuver noisesmay be caused by induced magnetic fields, eddycurrent fields, or the permanent field.The variations in the induced magnetic fielddetected by the magnetometer are caused by changesin the aircraft’s heading. This causes the aircraft topresent a varying size to the earth’s magnetic field,and only the portion of the aircraft parallel to the fieldis available for magnetic induction.Eddy current fields produce maneuver noisebecause of currents that flow in the aircraft’s skin andstructural members. When an aircraft’s maneuvercauses an eddy current flow, a magnetic field isgenerated. The eddy current field is a function of therate of the maneuver. If the maneuver is executedslowly, the effect of the eddy current field isnegligible.The structural parts of the aircraft exhibitpermanent magnetic fields, and, as the aircraftmaneuvers, its composite permanent field remainsaligned with it. The angular displacement betweenthe permanent field and the detector magnetometerduring a maneuver produces a changing magneticfield, which the detector magnetometer is designed todetect.DC Circuit NoiseThe dc circuit noise in an aircraft comes from thestandard practice in aircraft design of using asingle-wire dc system, with the aircraft skin andstructure as the ground return. The resulting currentloop from the generator to load to generator serves asa large electromagnet that generates a magnetic fieldsimilar to a permanent magnetic field. Whenever thedc electrical load of the aircraft is abruptly changed,there is an abrupt change in the magnetic field at thedetector.4-18
COMPENSATIONRegardless of its source, strength, or direction,any magnetic field may be defined in terms of threeaxial coordinates. That is, it must act through any orall of three possible directions—longitudinal, lateral,or vertical—in relation to the magnetometer detector.Compensation for magnetic noises is necessary toprovide a magnetically clean environment so that thedetecting system will not be limited to the magneticsignal associated with the aircraft itself.Experience has shown that the induced fields andeddy current fields for a given type of aircraft areconstant. That is, from one aircraft to another of thesame type, the difference in fields is negligible.These fields may be expected to remain constantthroughout the life of the aircraft, provided significantstructural changes are not made. In view of thesefactors, it is present practice for the aircraftmanufacturer to provide compensation for inducedfields and eddy current fields.Eddy current field compensation is usuallyachieved by placing the magnetometer (detectinghead) in a relatively quiet magnetic area. In someaircraft the detecting head is placed at least 8 feetfrom the fuselage. This is done by enclosing thedetecting head in a fixed boom (fig. 4-24, view A), orin an extendable boom (fig. 4-24, view B).Helicopters tow the detecting head by use of a cable(fig. 4-24, view C).Induced magnetic field compensation isaccomplished by using Permalloy strips. The aircraftis rotated to different compass headings, and themagnetic moment is measured. The polarity and thevariation of the magnetic moment are noted for eachheading, and Permalloy strips are oriented near thedetector magnetometer to compensate for fieldchanges due to aircraft rotation. AdditionalFigure 4-24.—A. Stationary detector boom. B. Extendable detector boom. C. Cable-deployed towed detector.232.1794-19
compensation is needed for the longitudinal axis andis provided for by the development of outriggercompensators of Permalloy near the detectingelement.Permanent field compensation must be done inthree dimensions rather than in two, and it isaccomplished by three compensating coils mountedmutually perpendicular to each other (fig. 4-25, viewA). The aircraft is rotated in 5-degree and 10-degreesteps around its three axes. Adjustment of the fieldstrength is accomplished by controlling the amount ofdirect current that flows through a particular coil.Figure 4-25, view B, shows a circuit for a singlecompensating coil.Compensation for the dc magnetic field isaccomplished by using electromagnetic compensatingloops. The loops are arranged to provide horizontal,vertical, and longitudinal fields, and they are adjustedto be equal and opposite to the dc magnetic fieldcaused by the load current. The compensating loopsare connected across a variable resistor for aparticular distribution center, and they are adjusted toallow current flow proportional to the load current forcorrect compensation. Different types of aircrafthave several sets of compensation loops, dependingupon the number of distribution centers. In neweraircraft, production changes have been made to useground return wires to minimize loop size.The procedure for adjustment of the dc compensationsystem makes use of straight and levelflight on the four cardinal headings. For example,actuation of a cowl flap motor will cause dc fieldchanges representative of those caused by any nacelleload. The load is energized, the size and polarity ofthe signal are noted, and the compensation control isadjusted. The load is reenergized, and the compensationcontrol is adjusted again. Adjustments arecontinued until the resulting signals from the dc fieldare minimized.Under ideal conditions, all magnetic fields thattend to act on the magnetometer head would becompletely counterbalanced. In this state the effecton the magnetometer is the same as if there were nomagnetic fields at all. This state exists only when thefollowing ideal conditions exist:1. The aircraft is flying a steady course through amagnetically quiet geographical area.2. Electric or electronic circuits are not turned onor off during compensation.3. Direct current of the proper intensity anddirection has been set to flow through the compensationcoils, so that all stray fields are balanced.To approximate these conditions, the compensationof MAD equipment is usually performed inflight, well at sea. In this way, the equipment iscompensated under operation conditions, whichclosely resemble those of actual ASW search flights.From the foregoing, it should be clear that theobjective of compensation is to gain a state of totalbalance of magnetic forces around the magnetometer.Thereafter, any sudden shift in one of the balancedforces (such as an anomaly in the earth’s field force)upsets the total balance. This imbalance is indicatedon the recorder. Unfortunately, a shift in ANY of thebalanced forces will be indicated. Shift in any of theforces other than the earth’s natural field are regardedas noise.MAJOR COMPONENTSFigure 4-25.-A. Arrangement of compensating colts.B. Compensating coil circuit.The MAD system consists of the AN/ASQ-81MAD set, AN/ASA-64 submarine anomaly detecting(SAD) group, AN/ASA-65 magnetic compensator4-20
group, AN/ASA-71 selector control group, and theRO-32/ASQ MAD recorder.AN/ASQ-81 MAD SetThe AN/ASQ-81 set consists of the DT-323magnetic detector, the AM-4535 amplifier-powersupply, and the C-6983 detecting set control box.DT-323 MAGNETIC DETECTOR.— Thedetection element includes six separate heliumabsorption cells and six IR detectors, arranged inpairs, with the pairs oriented at 90° to each other.This configuration ensures that one or more of thepairs is at least partially in line with the earth’s fieldregardless of aircraft attitude or direction of flight.The signals from all three detector pairs are combinedin a summing amplifier. The final output to theamplifier-power supply is not affected by aircraftmaneuvers because of the arrangement.AM-4535 AMPLIFIER-POWER SUPPLY.—The amplifier-power supply (fig. 4-26) serves twopurposes. The first purpose is the power supplyportion. This section provides the necessary power tothe MAD subsystem. The amplifier section containsthe necessary electronics to detect the anomaly signalfrom the detector output signal.There are three fail indicators on the amplifierpowersupply. The FAIL light comes on when there isa fault in the assembly being tested with the BITEswitch. The FAIL DETECTOR and the FAIL AMPPWR SUPPLY lights indicate failure of the magneticdetector or the amplifier-power supply. The ALTCOMP dial is used to vary the amplitude of thealtitude compensation signal. The BUILT IN TESTswitch provides a self-test of quick replaceableassemblies in the amplifier-power supply. The twocircuit breakers provide circuit protection for the dcpower to the magnetic detector and the 115-volt acpower to the amplifier-power supply.On the right side of the amplifier-power supply,there is a hinged door that covers a maintenancepanel. When this door is closed, the equipmentoperates in the normal mode. On the maintenancepanel there is a RES OSC ADJ switch that is used tomanually adjust the resonance oscillator frequencyduring maintenance procedures. There is also aMODE SELECT switch that selects various systemconfigurations necessary for proper maintenance andtroubleshooting.C-6983 CONTROL BOX.— The detecting setcontrol box (fig. 4-27) contains the operating switchesand indicators for the MAD system. Across the top ofthe faceplate are five indicators that indicate faults inthe other units. The indicator labeled 3 indicates amagnetic detector failure when lit. The indicatorlabeled 2 indicates amplifier failure. The next twoindicators indicate a control box fault. The SYSREADY indicator illuminates when the system isready for operation. This indicator will blink duringwarm-up.There are three toggle switches across the middleportion of the control box. The one on the right is thepower switch. This switch applies power to thesystem. The middle switch is labeled CAL. It selectsthe calibration signal for use. The switch on the left isFigure 4-26.-AM-4535 amplifier-power supply.Figure 4-27.-C-6893 detecting set control.4-21
labeled ALT COMP. This switch is used to connectthe altitude compensator to the system.The bottom portion of the control box containsfour knobs. The two on the left side are labeledBANDPASS. These knobs select the high and lowfrequencies. The knob labeled REC ZERO is adual-purpose knob. Turning this knob controls thepen deflection on the recorder. Depressing the knobinhibits system output. The bottom right knob islabeled gFS, and is used to select one of ninesensitivity ranges (from 0.1γ to 40γ full scale) orself-test. In the TST position, the self-test functionwill be initiated.AN/ASA-64 SAD GroupThe SAD group consists of only one unit-theID-1559 magnetic variation indicator (MAG VARindicator). This indicator receives the MAD signalsfrom the ECA, along with roll attitude signals. Thesesignals are processed and a SAD mark is generated,which is correlated with the roll input. In cases ofexcessive aircraft roll rate, the indicator will generatea SAD inhibit signal. This signal illuminates the SADINHIBIT lights on the selector control panel and thepilot and copilot’s navigation advisory panel, lettingthe operators know the SAD mark is unreliable.AN/ASA-65 Magnetic Compensator GroupThe magnetic compensator group consists of theAM-6459 electronic control amplifier (compensatorECA), C-8935 control-indicator, DT-355 magnetometerassembly, three compensating coils,CP-1390 magnetic field computer, and ID-2254magnetic field indicator.On the face of the control-indicator there are nineindex counters. The top three provide the adjustmentindex for the potentiometers in the transverse,longitudinal, and vertical magnetometer circuits.They are labeled T (transverse), L (longitudinal), andV (vertical). The other six (labeled 1 to 6) providecompensation adjustment for the T, L, and Vmagnetometer circuits.The MAG TERM knob selects the magnetic termto be compensated. This knob must be in the OFFposition unless compensation is required. The RATEknob selects the speed of the servomotor with 1 beingthe slowest and 4 the fastest.Across the bottom of the faceplate there are fourtoggle switches. The POWER-OFF switch providespower to the unit. The SERVO-OFF switch providesboth ac and dc power to the servomotor system. Thisswitch must be in the OFF position unlessrecompensation is required. The UP-DOWN switchprovides voltage directly to the servomotor selected.The counter indication will increase or decreasedepending on which way this switch is toggled. The+/OFF/– switch provides voltage to the servo system.In the OFF position, the servomotor is operated onlyby the UP-DOWN switch.DT-355 MAGNETOMETER ASSEMBLY.—The magnetometer assembly contains three coilsoriented to sense magnetic strength in each of thebasic longitudinal, transverse, and vertical axes. ThisAM-6459 ELECTRONIC CONTROLAMPLIFIER.— The electronic control amplifier(ECA) processes standard magnetic anomaly detectorsignals from the MAD subsystems, operatorcompensation adjustments, and maneuver signalsfrom the magnetometer. The ECA providescompensation currents, which are sent to the MADboom compensation coils.C-8935 COMPENSATOR CONTROL-INDICATOR.— This control-indicator (fig. 4-28)contains potentiometers for adjustment of themaneuver and correlated signals into compensatingterms. The potentiometer outputs are routed back tothe ECA to be amplified. From there they are sent tothe compensator coil as compensation signals.Figure 4-28.-Compensator control-indicator.4-22
esults in three output signals, which are sent to theECA. These coils are located in the MAD boom.COMPENSATION COILS.— There are threecompensating coils located in the boom. These coilsgenerate the magnetic field that opposes theaircraft-generated noise fields for compensation.There is one coil each for the transverse, vertical, andlongitudinal fields.CP-1390 MAGNETIC FIELD COMPUTER.—The magnetic field computer, along with the magneticfield indicator, computerizes the compensationprocedure. The correlation portion of the system, the2A5 board in the ECA, becomes redundant to thecomputer. The magnetic field computer receives themaneuver signals, MAD signals, and thepotentiometer outputs. From these signals, itcomputes the adjustment values for the nine magneticterms simultaneously.ID-2254 MAGNETIC FIELD INDICATOR.—The magnetic field indicator (fig. 4-29) allows theoperator to select various weapon loads and initiatethe self-test, auto compensation, and weapon deploymentprograms. It also displays the most recentcomputer-calculated term difference value.The PWR/OFF switch accesses aircraft power.The DISPLAY indicator is a four-digit numericaldisplay and a polarity indicator. It shows the variousBITE codes, term values, or calibration values. TheEXEC push button initiates all commands. Thisbutton must be pressed after each selection of theMODE switch.The MODE switch is a 14-position rotary switchthat provides computer identification and control offixed compensation functions. The OFF positionmeans that there are no functions processed. TheBITE position conducts a built-in test and reports theresults via the digital readout. In the COMP position,pressing the EXEC button conducts the nine-termcompensation program. The WD position enables thefour-term weapon deployment compensationprogram. In the CAL position, a digital valuemeasurement of the magnetic coils for calibrationaccuracy is initiated. The other nine positions reportthe most recent computer-calculated term differencevalue via the DISPLAY. Remember, after selectingany of the positions on the MODE switch, the EXECbutton must be pressed.The FAULT indicator illuminates whenever afault condition exists. The WPN LOAD switch is anine-position switch labeled 0-8. The number ofweapons being carried is selected on this switch priorto compensation. This provides compensation for atleast 80 percent of the weapons interference field.AN/ASA-71 Selector Control GroupThe selector control group consists of two units.These units are the MAD selector control panel andthe selector control subassembly.C-7693/ASA-71 SELECTOR CONTROLPANEL.— This selector control (fig. 4-30) selects thesignal to be recorded on the MAD recorder andadjusts the threshold voltage for the SAD system.The two knobs labeled BLACK PEN and RED PENFigure 4-29.-ID-2254 magnetic field indicator.Figure 4-30.-C-7693/ASA-71 selector control panel.4-23
select which signal goes to which pen on the recorder.The MAD AUX POWER-OFF switch suppliesprimary ac power to the SAD system and the selectorcontrol subassembly. The INHIBIT light indicates aninhibit signal from the SAD system.MX-8109/ASA-71 SELECTOR CONTROLSUBASSEMBLY.— The MAD signals from theMAD control and the SAD mark from the MAG VARindicator are routed to this subassembly. The selectorcontrol panel selects which one goes to which pen,and the subassembly routes the signal to the properpen. A SAD mark 1-kHz tone is generated by thesubassembly to be supplied to the ICS system for theSENSOR operator.RO-32 MAD RecorderThe RO-32 recorder makes a hardcopy of MADcontacts and SAD marks. This recorder has twostyluses, one black and one red, to differentiatebetween the two. The chart drive is removable toenable the operator to remove and replace the papertape. here are three knobs on the faceplate. The firstswitch is the ON/OFF switch. The second controlsthe intensity of the internal lights. The third knobselects the operate mode along with the pencalibration modes.When B is selected on the mode knob, the blackpen should trace along the zero line on the paper tape.When the mode knob is switched to the +, the blackpen should go to +4. When this knob is switched tothe R position, the red pen traces along the zero line.When it goes to the +, the red pen should swing to the+4 line. Both pens are adjustable to these settings.SONOBUOYSLearning Objective: Recognize theclassifications and the operating principlesof sonobuoys currently in use.The detection, localization, and identification ofsubmarines is the primary mission of the Navy’sairborne ASW forces. The ability of the Navy tocomplete this mission is dependent upon thesonobuoy. The sonobuoy has undergone a great dealof change in the past 25 years. These improvementshave provided the fleet with large numbers of veryreliable sonobuoys that perform various missions.OPERATING PRINCIPLESThe sonobuoys are dropped from the aircraft intoan area of the ocean thought to contain a submarine.The pattern in which the sonobuoys are droppedusually involve three or more buoys.The sonobuoys detect underwater sounds, such assubmarine noise and fish sounds. These soundsmodulate an oscillator in the RF transmitter portion ofthe sonobuoy. The output of the transmitter is afrequency modulated VHF signal that is transmittedfrom the antenna. The signal is received by theaircraft, and then detected and processed by asonobuoy receiver. By analyzing the detected sounds,the ASW operator can determine variouscharacteristics of the detected submarine. The use ofseveral sonobuoys operating on different VHFfrequencies in a tactical pattern enables the ASWoperator to localize, track, and classify a submergedsubmarine.Each sonobuoy type is designed to meet a specificset of specifications that is unique to that particularsonobuoy. Even though different manufacturers, thespecifications and operational performancecharacteristics are the same for all manufacturers.There are differences in the methods used forprelaunch selection of life and depth settings from onemanufacturer to another for the same sonobuoy types.These differences are found in the SonobuoyInstruction Manual, NAVAIR 28-SSQ-500-1. Youshould refer to this manual prior to storing, handling,or disposing of sonobuoys.Sonobuoy Frequency ChannelsCertain sonobuoy designs are equipped with anelectronic function select (EFS) system. The EFSsystem provides each sonobuoy with a selectable99-channel capability. EFS also provides eachsonobuoy with 50 life and 50 depth setting selections.The operator must reset all three settings any time anyof the three are changed.With the older type of sonobuoy, the transmitterfrequency is preset at the factory. here were 31different channels used within the 162.25- to173.5-MHz band. Transmitter frequency is designedto be within ±25 kHz. temperature extremes in hot orcold storage adversely affect these tolerances,especially in sonobuoys that are older.4-24
External MarkingsEach sonobuoy has marked on the sonobuoy casethe following information: nomenclature or type,serial number, manufacturer’s code number, RFchannel number, contract lot number, weight, andprelaunch setting. Sonobuoy type and RF channelnumber are also stamped on each end of the buoy.Sonobuoys with EFS will have no RF channel numbermarkings because the channel will be selected by theoperator.DeploymentThe sonobuoy is aircraft deployable by any offour methods: spring, pneumatic, free-fall, orcartridge. Because descent velocities can exceed 120feet per second, a descent-retarding device is used toincrease aerodynamic stability and to reducewater-entry shock. A parachute or a rotating-bladeassembly (rotochute) is used as the descent-retardingdevice. Because of the different descentcharacteristics of the parachute and rotochute, do notintermix the two. With intermixed sonobuoys, thespacing of the tactical pattern will not be right andsubmarines might be missed.Water Entry and ActivationThe force of water impact, or battery activation,initiates the deployment or jettison of-the varioussonobuoy components. Jettisoning of the bottomplate allows the hydrophone and other internalcomponents to descend to the preselected depth.Upon the release of the parachute or rotochute, theantenna is erected. In some sonobuoys, a seawateractivatedbattery fires a squib, which deploys a floatcontaining the antenna. A termination mass and/ordrogue stabilizes the hydrophone at the selecteddepth, while the buoyant sonobuoy section or floatfollows the motion of the waves. A section of elasticsuspension cable isolates the hydrophone from thewave action on the buoyant section. Most of thesonobuoys in the fleet today are equipped withseawater-activated batteries, which provide the powerrequired for the sonobuoy electronics. Datatransmission from the buoys usually begins within 3minutes after the buoy enters the water. In cold waterand/or water with low salinity, the activation timemight be increased. Some sonobuoys now havenonwater-activated lithium batteries.Sonobuoy Operating LifeAt the end of the preselected time, the sonobuoytransmitter is deactivated. The sonobuoy has eitheran electronic RF OFF timer, or, as is most common,the transmitter is deactivated when the buoy isscuttled. At the end of the sonobuoy life, or for sometypes of sonobuoys upon RF command, a mechanismallows seawater to flood the flotation section in thebuoy. In some cases, the flotation balloon is deflatedto scuttle the unit. Either way, the unit fills withseawater and sinks.SONOBUOY CLASSIFICATIONSonobuoys are grouped into three categories:passive, active, and special purpose. Passivesonobuoys are used in LOFAR and DIFAR systems.Active sonobuoys are used in CASS and DICASSsystems. Special-purpose sonobuoys are used inmissions other than ASW. These sonobuoys andacronyms, along with their meanings and relationshipsto each other, are discussed below.Passive SonobuoyThe passive sonobuoy is a listen-only buoy. Thebasic acoustic sensing system that uses the passivesonobuoy for detection and classification is known asthe low-frequency analysis and recording (LOFAR)system.LOFAR SYSTEM.— With this system, soundsemitted by the submarine are detected by ahydrophone that has been lowered from a passiveomnidirectional sonobuoy. Data regarding thefrequency and amplitude of these sounds are thentransmitted by the sonobuoy antenna to the receivingstation. At this station, normally on the aircraft, thesound data is analyzed, processed, displayed, andrecorded. The basic LOFAR display plots thefrequency of the sound waves against the intensity oftheir acoustic energy, and against the duration of thesound emission. This data can be displayed on avideo screen and printed out. The data is alsorecorded on magnetic tape for storage and retrievalwhen desired.DIFAR SYSTEM.— The directional lowfrequencyanalysis and recording system (DIFAR) isan improved passive acoustic sensing system. Using4-25
the passive directional sonobuoy (fig. 4-31), DIFARoperates by detecting directional information, andthen frequency multiplexing the information to theacoustic data. This signal is then transmitted to theaircraft where it is processed and the bearing iscomputed. Subsequent bearing information from thebuoy can be used to pinpoint, by triangulation, thelocation of the sound or signal source.Active SonobuoyThe active sonobuoy is either self-timed (thesonar pulse is generated by the buoy at a fixed pulselength and interval) or command actuated. Thecommand activated buoy is controlled by a UHFcommand signal from the aircraft. An activesonobuoy uses a transducer to radiate a sonar pulsethat is reflected back from the target. The timeinterval between the ping (sound pulse) and the echoreturn to the sonobuoy is measured. Taking theDoppler effect on the pulse frequency into consideration,this time-measurement data is used tocalculate both range and speed of the submarinerelative to the sonobuoy.RO SONOBUOYS.— Self-timed active sonobuoys,known as range-only (RO) sonobuoys, are set to pingfor a limited period, starting from the time they aredeployed. These buoys will provide information onrange of targets only.CASS SONOBUOYS.— The command activatedsonobuoy system (CASS) allows the aircraft todeploy the sonobuoy, but the buoy will remain passiveuntil commanded to ping. This allows the aircraft tosurprise the submarine.DICASS SONOBUOY.— The addition of adirectional hydrophone turns the CASS sonobuoy intoa DICASS buoy. A DICASS sonobuoy allows theaircraft acoustic analysis equipment to determine therange and bearing to the target with a singlesonobuoy. DICASS sonobuoys are replacing the ROand CASS sonobuoys.Special-Purpose SonobuoysThere are three types of special-purposesonobuoys in use today. These are the BT, SAR, andthe ATAC sonobuoys. These sonobuoys are notdesigned for use in submarine detection orlocalization.Figure 4-31.-Block diagram of the DIFAR sonobuoy.BATHYTHERMOBUOY.— The bathythermobuoy(BT) is used to measure water temperatureversus depth. The water depth is determined bytiming the descent of a temperature probe. Once theBT buoy enters the water, the probe descendsautomatically at a constant 5 feet per second.The probe uses a thermistor, a temperaturedependentelectronic component, to measure thetemperature. The electrical output of the probe isapplied to a voltage-controlled oscillator. Theoscillator’s output signal frequency modulates thesonobuoy transmitter. The frequency of thetransmitted signal is linearly proportional to the watertemperature. The water temperature and depth arerecorded on graph paper that is visible to the ASWoperator. The sonobuoy signal is processed by theacoustic equipment on board the aircraft.SAR BUOY.— The search and rescue (SAR)buoy is designed to operate as a floating RF beacon.As such, it is used to assist in marking the location ofan aircraft crash site, a sunken ship, or survivors atsea. The buoy can be launched from aircraft equippedto launch sonobuoys or deployed over the side byhand. Nominal RF output is 1 watt for 60 hours onsonobuoy channel 15 (172.75 MHz). A floatingmicrophone is provided for one-way voice communication.The RF beacon radiates automatically andcontinuously, regardless of whether the microphone isused. A flashing light and dye marker areincorporated in the buoy. The buoy also has an 8-foottether line for attaching the buoy to a life raft or aperson.4-26
ATAC/DLC.— The air transportable communication(ATAC) and down-link communication (DLC)buoys are intended for use as a means of communicationbetween an aircraft and a submarine. TheATAC buoy is commendable from the aircraft andprovides up-link and down-link communications by apreselected code. The DLC buoy is not commandableand provides a down-link communicationsonly by a preselected code.ACOUSTIC SYSTEMLearning Objective: Recognize componentsand operating principles of a typical acousticsystem.The AN/UYS-1 single advanced signal processorsystem (SASP) processes sonobuoy acoustic audioand displays the resulting data in a format suitable foroperator evaluation in the P3-C Update III aircraft.SONOBUOY RECEIVERSLearning Objective: Recognize the operatingprinciples and components of a typicalsonobuoy receiver.The sonobuoy receiver set that will be discussedin this chapter is the AN/ARR-75. This set is used onthe H-60 LAMPS helicopter.The radio receiving set (RRS) receives,demodulates, and amplifies sonobuoy transmissionsin the VHF bands, It provides channels A, B, C, andD acoustic data to the data link for transmission to theship via the communications system control group.Channels E, F, G, and H acoustic data is provideddirect to the data link for transmission to the ship.The acoustic data is also routed to the spectrumanalyzer group for processing and display on boardthe aircraft. Simultaneous reception and demodulationof standard sonobuoy RF channels is possible.Any one of the received channels can be selected foraural monitoring. The RRS consists of two radioreceiver groups.The radio receiver groups each consist of fourVHF radio receivers and a power supply. Each of thefour receivers can operate on a separate channel,independent of the others. The RF signals receivedby the sonobuoy antennas are applied to each of thefour receiver modules, where tuned filters select thesignals for each module. The signals then passthrough a series of amplifiers, filters, and mixers toproduce the output audio signals. The output signalsare supplied to the spectrum analyzer group and thedata link system. The spectrum analyzer processesthe signals to allow monitoring by the aircrew.OPERATING PRINCIPLESThe SASP processes sonobuoy audio in activeand passive processing modes to provide long rangesearch, detection, localization, and identification ofsubmarines. The sonobuoys presently in use includethe LOFAR, DIFAR, CASS, DICASS, and BT. TheRF signals from the sonobuoys are received by thesonobuoy receivers and sent to the SASP. Afterprocessing, signals are sent to the displays and therecorders for operator use. The SASP also generatescommand tones for controlling the CASS andDICASS sonobuoys.COMPONENTSThe major components include the TS-4008/UYS-1 spectrum analyzer (SA), PP-7467/UYS-1power supply, and the C-11104/UYS-1 controlindicator(SASP power control).TS-4008/UYS-1 Spectrum AnalyzerThe TS-4008/UYS-1 spectrum analyzer is ahigh-speed signal processor designed to extractacoustic target information from both active andpassive sonobuoy data. The SA determinesfrequency, amplitude, bearing, Doppler, range, andother characteristics for acoustic targets.PP-7467/UYS-1 Power SupplyThe PP-7467/UYS-1 power supply converts 115volts ac into 120 volts dc operating voltages. The120-volt dc power is then converted to low-level dcvoltages for operation of individual circuits. A powerinterrupt unit protects the data against transient powerinterruptions that normally occur during airborneoperations.4-27
REVIEW QUESTIONSQ1. How was the word SONAR derived?Q2. In echo-ranging sonar, what is the source ofthe sound wave used?Figure 4-32.-SASP control-indicator.C-11104/UYS-1 Control-IndicatorThe C-11104/UYS-1 control-indicator (fig. 4-32)consists of one switch-indicator, two indicators, andone switch. The switch-indicator is labeled POWERON/OFF. It controls the power to the SA, the displaycomputer (DCU), the CASS transmitter, and thedisplays. The AU/DCU CAUTION/OVHT indicatorindicates the temperature status in the SA and theDCU. The CAUTION section will flash on when thethermal warning is activated in either unit. TheOVHT section indicates an overheat in either unit.The STA OVHT indicator indicates an overtempcondition exists at the sensor stations 1 and 2consoles. The OVERRIDE-NORMAL switch willoverride the overheat warnings for the sensor stations1 and 2 consoles.Q3. What are the three main characteristics ofseawater that affect the speed of a sound wavepassing through it?Q4. On the azimuth and range indicator of theAN/ASQ-13E, what does the cursor intensityknob control?Q5. What is the length of the special-purposecable of the AN/ASQ-13E?Q6. What are the staves of the hydrophoneassembly filled with?Q7. What is an anomaly?Q8. What happens to the magnetic field of anaircraft as it maneuvers?Q9. How many units are therein the ASA-64 SADgroup?Q10. With a sonobuoy equipped with EFS, howmany depth settings are available?4-28
CHAPTER 5INDICATORSIn this chapter, we will discuss the various typesof indicators in use today. These indicators rangefrom the heading indicators to the newest heads-updisplay (HUD) tactical displays. Every effort wasmade to include as many different platforms aspossible.HEADING INDICATORSLearning Objective: Identify the types ofheading indicators and their primaryfunctions.The two heading indicators that we will bediscussing are the horizontal situation indicator (HSI)and the bearing-distance-heading indicator (BDHI).Both of these indicators are used on many differenttypes of aircraft. The information displayed by theseindicators comes from the various navigationalsystems on the aircraft. The HSI displays moreinformation than the BDHI.1. The lubber line is the reference line forreading the aircraft’s heading on the compass card.2. Bearing pointer 1 points to the bearing of theselected navigational point.3. The heading marker indicates the desiredheading as set by the HEADING SET knob.4. The course arrow indicates the course set bythe COURSE SET knob in the radio navigation mode.This arrow indicates the course set by the computer inthe tactical navigational mode.5. The COURSE indicator displays, in degrees,a digital readout of the course arrow setting.6. The mode lights indicate the operating modeselected on the HSI control box for that station.7. The course deviation bar indicates deviationrelative to the course arrow position for VOR orHORIZONTAL SITUATION INDICATORThe HSI system we will discuss is the system inuse on the P3-C aircraft. The HSI group provides thepilot, copilot, and NAV/COMM operator with a visualdisplay of aircraft course, bearing, heading, anddistance to a selected point.System ComponentsThe HSI group consists of three ID-1540/Aindicators and three control boxes. The three controlboxes are the pilot’s control, copilot’s control, and theNAV/COMMs control. The three ID-1540/As areinterchangeable between the three stations, but thecontrol boxes are not.ID-1540/A HORIZONTAL SITUATIONINDICATOR.— The ID-1540/A indicator (fig. 5-1) isa multipurpose aircraft situation indicator. It keepsthe pilot, copilot, and the NAV/COMM operatorinformed of the aircraft’s situation at any givenmoment. Refer to figure 5-1 while reading thefollowing text.Figure 5-1.-ID-1540/A horizontal situation indicator.5-1
TACAN signals. When localizer signals are beingused, the deviation is relative to the localizer.8. The To-From arrows indicate whether theselected course is going toward or away from theselected beacon station.9. The course deviation dots indicate coursedeviation in degrees relative to the course deviationbar position.10. The COURSE SET knob allows the operatorto set both the course arrow to a desired course andthe COURSE indicator to the desired course readoutwhen in any mode other than TAC NAV.11. The bearing pointer 2 indicates the bearing toa selected navigational point.12. The HEADING SET knob allows theoperator to set the heading mark to any desiredheading.13. The compass card indicates the aircraftcompass heading when read against the lubber line.14. The OFF flag will appear whenever there is apower failure.15. The MILES counter displays a digitalreadout of distance, in nautical miles, to a selectedTACAN station.16. The aircraft symbol indicates the lubber line,which, in turn, indicates aircraft heading.17. The NAV flag will appear if the signal inputfrom the selected TACAN or VOR becomesunreliable.To-From signals to position the course deviation barand the To-From arrows. They will come from theVOR-2 NAV converter (VOR-2), the VOR-1 NAVconverter (VOR-1/ILS), the TACAN R/T (TACAN),and the central computer TAC NAV) when the BRG1 switch is in the DA position.4. The BRG 1 switch selects the source of thebearing signal to be displayed on the pilot’s, copilot’s,and NAV/COMM’s HSIs bearing pointer 1. Thisswitch controls all three HSIs. The bearing sourcesavailable are the VOR-2 NAV converter (VOR 2),VOR-1 NAV converter (VOR 1), TACAN R/T(TACAN), ADF receiver (ADF), or UHF directionfinder group (DF). In the DA position, the drift anglesupplied by the Doppler radar or the central computeris sent to the bearing pointer 1.A279 COPILOT HSI CONTROL.— The A279control box (fig. 5-3) controls the inputs to thecopilot’s HSI. It allows the copilot to select thenavigational aid. Refer to figure 5-3 when reading thefollowing text.1. The HDG selector switch selects the source ofheading information supplied to the HSI compasscard. Either INS-2 or INS-1 is available.2. The ATTD selector switch selects the sourceof pitch and roll signals for display on the FDI sphere.The source can be either the INS-2 or the vertical gyro(STBY GYRO).A280 PILOT HSI CONTROL.— The A280(fig. 5-2) controls the inputs to the pilot’s HSI. Thisunit allows the pilot to select inputs from the differentnavigational aids. Refer to figure 5-2 when readingthe following text.1. The HDG selector switch selects the headingsignal source for display on the HSI compass card.The pilot can select either inertial navigation system 1(INS-1) or inertial navigation system 2 (INS-2).2. The ATTD selector switch selects the sourceof pitch and roll signals for the flight directoryindicator (FDI) sphere. The signals will either comefrom the INS-1 or from the vertical gyro (STBYGYRO).3. The COURSE HSI-FDS selector switchselects the source of course signals for display on theHSI. The signals include the course deviation andFigure 5-2.-A280 pilot HSI control.5-2
3. The COURSE selector switch selects thesource of course signals for display on the HSI. Thesources available for selection are VOR-2, VOR-1, orTACAN. Selecting the TAC NAV REP position willslave the copilot’s HSI to the pilot’s, provided theBRG 2 switch is in the DA/DF position.4. The BRG 2 selector switch selects the sourceof the bearing signal for display on both the pilot’sand copilot’s bearing pointer 2. The sources availablefor selection are VOR-2, VOR-1, TACAN, ADF, orDF. The DA/DF position will provide drift angleinformation, if in radio navigation mode, or DFsignals, if in the tactical navigational mode.Figure 5-3.-A279 copilot HSI control.A309 NAV/COMM HSI CONTROL BOX.—The A309 control box (fig. 5-4) allows theNAV/COMM operator to select the inputs to the HSIat the NAV/COMM station. It also indicates certainsystem malfunctions. Refer to figure 5-4 whenreading the following text.Figure 5-4.-A309 NAV/COMM HSI control box.5-3
1. The HEADING NO-GO indicator illuminateswhen there is a failure with the heading function in thecentral repeater system (CRS).2. The ATTD BEARING NO-GO indicatorilluminates when there is a failure with the attitudebearing function in the central repeater system.3. The DIST NO-GO indicator is not used in theP3-C.4. The COURSE selector switch selects thecourse data for display on the HSI. The course data iseither set by the computer (COMP) or by the pilot’scontrol box (REP PILOT).5. The HDG switch selects either magnetic(MAG) or true (TRUE) heading signal inputs to bedisplayed on the NAV/COMM HSI.6. The HDG/ATTD switch selects either INS-1or INS-2 to be the source for the heading data signalto be displayed.7. The BRG 2 selector switch selects the sourcefor the information to be displayed on theNAV/COMM HSI bearing pointer 2. The sourcesavailable for selection are VOR-2, VOR-1, TACAN,ADF, DF, or DA. In the DA position, drift anglesupplied by the Doppler radar or the central computeris displayed.System DescriptionThe HSI system functions as a selectable displayfor the navigational systems on the aircraft.When the TACAN, VOR-1, or VOR-2 system isselected, the corresponding system will provide radialbearing and bearing information, NAV flag, coursedeviation, and To-From signals to the HSI. Thebearing signal will position the bearing pointer 1 orbearing pointer 2, as selected. The radial bearinginformation is resolved with the course set by theCOURSE SET knob. The resultant signal is returnedto the TACAN, VOR-1, or VOR-2 to be used todevelop the course deviation and To-From signals.These signals are returned to the HSI, where thecourse deviation signal displaces the course deviationbar. The To-From signal will drive the To-Fromarrow in the proper direction. If the flag input signalbecomes unreliable during a radio navigation mode,the NAV flag appears on the HSI. When TACAN isselected, the distance signal from the TACAN willposition the dials of the distance counters to reflectthe distance to or from the TACAN station.The UHF-DF/OTPI and the ADF systems willsupply bearing information when selected. Thisinformation is routed to either the bearing pointer 1 orbearing pointer 2, as selected.Magnetic and true heading information issupplied to the HSI compass card by the INS-1 andINS-2, as selected. Magnetic heading is normallyused to position the compass card. When a tacticalmode is selected, magnetic heading information isswitched out of the circuit, and the compass card willbe driven by the true heading information.BEARING-DISTANCE-HEADINGINDICATORThe bearing-distance-heading indicator (BDHI)(fig. 5-5) may be used with the various navigationalsystems, and it provides information according to themode selected. Some aircraft may have more thanone BDHI, with separate select switches for eachinstrument. The distance counter numerals may be ina vertical row or horizontal, as shown in figure 5-5.Indicator PartsThis section will explain the various parts of theBDHI. Refer to figure 5-5 while reading the followingtext.The lubber index is a fixed reference mark thatallows the operator to read the heading from theFigure 5-5.-Bearing-distance-heading indicator.5-4
compass card. The compass card moves with theheading of the aircraft. The distance counter indicatesthe distance to the selected station. There are twopointers—a single bar and a double bar. Thesepointers or bars can indicate (1) bearing to a groundelectronic station, (2) bearing to destination,(3) aircraft ground track, (4) aircraft drift angle, or(5) heading error. The available combinations ofthese indications are limited by the BDHI selectswitches used in the given aircraft configuration.Primary FunctionsElectrical signal inputs for the compass card andthe pointers come from the synchro transmitterslocated in the various navigational systems. Thecompass card will follow the heading of the aircraftand is read at the lubber index. The distance countermay display distance to base, target, or ground station,depending upon the mode selected. It consists ofthree synchro torque receivers to position the units,tens, and hundred numerals. There is also a 1,000 flagto place the numeral 1 preceding the hundredsnumeral, which enables the counter to displaydistance up to 1,999 nautical miles. The OFF flagcovers the distance counter when distanceinformation is not provided or is unreliable.The airborne computers are used to gatherinformation from all aircraft sensors and systems.They then perform high-speed solutions and send outcontinuously updated information to the varioustactical display systems on the aircraft. These displaysystems vary from aircraft to aircraft, and theinformation displayed depends on the type of missionthe aircraft was designed to perform.The typical HUD TDS is an electro-opticalsight system for use only by the pilot. Thepurpose of the electro-optical display unit is todisplay attack and flight information directly tothe pilot’s field of view. The electro-opticaldisplay uses a light source (fig. 5-6) to displayHEADS-UP DISPLAY (HUD)Learning Objective: Recognize componentsand functions of a typical Heads-Up Display(HUD) tactical display system.Modern aircraft are equipped with instrumentsand displays to provide the aircrew with up-to-datevisual information about the performance of theaircraft. Since the advent of airborne computers,radar, and other state-of-the-art avionics equipment,the concept of visual information has taken on a newmeaning. In this age of lasers, high-speed missiles,nuclear submarines, and stealth aircraft, the Navy hashad to incorporate new visual display systems, andconstantly improve these systems as technologyadvances. The visual display system, commonlycalled the “tactical display system” (TDS), is used bythe aircrew to search for, attack, and destroy theenemy. The TDS is also used to gather informationabout the enemy and to allow the aircrew to defendthe aircraft when attacked.Figure 5-6.-Basic principle of a sight unit.5-5
Figure 5-7.-New optical sight with CRT.the information. Figure 5-7 shows an example of amodern electro-optical sight. This unit or system isknown as a heads-up display (HUD).The HUD receives computed attack andnavigational input signals from a tactical computer,aircraft performance data from aircraft flight sensors,and discrete signals from various aircraft systems(fig. 5-8). Information received from these sources isdisplayed on a transparent mirror (combiner) locateddirectly in front of the pilot at eye level. The HUDprocesses these signals in the signal data processor.These signals are then applied to the display unit as X(horizontal), Y (vertical), and Z (bright-up) signalsthat provide the symbols that appear on the combiner.The symbols are focused to infinity and aresuperimposed over real world objects in line with theaircraft flight path. Certain symbols are positioned onthe combiner to correspond with real world objectpositions relative to the aircraft, even though the realworld object may not be visible.COMPONENTSThis section will discuss the two major componentsof a HUD set—the signal data processor andthe heads-up display unit.Signal Data ProcessorThree-phase ac power is applied to six differentrectifiers contained in the low-voltage power supply.The ac voltage is rectified by each rectifier, and thenregulated to a precise value. Each value of dc supplyvoltage is distributed for circuit operation through thesignal data processor.INPUT RECEIVERS.— Digital data signals areapplied to the input receivers on four channels. Datatransfer is in serial form, and all four channels are inoperation at the same time. Each channel consists ofa signal and a signal-return line. Specific input data isapplied to each channel as follows:1. Channel one receives a data word signal and adata word signal return.2. Channel two receives the data identity signaland a data identity signal return.3. Channel three receives a data ready signal anda data ready return signal.4. Channel four receives a data clock signal anda data clock return signal.Data identity signals are transmitted simultaneouslywith each data word signal. They identifythe data word. The identity signal consists of 20 bitsof data, which include the control bit, data identity,and parity bit.5-6
DIGITAL COMPUTER.— The digital computerprocesses the applied digital data in three phases.After the three phases are completed, the entire cycleis repeated. All steps of each phase are performedsequentially according to a prewired program ofinstruction contained in the program. When electricalpower is applied to the digital computer, clock pulsesare generated within the clock generator of theprogram. The clock pulses are distributed by thecontrol logic to the sequence control, input receivers,symbol generator, and processor counter. Theprocessor counter is used to record a specific numberof clock pulses so that the demand-next instruction(DNI) pulse is not arbitrarily initiated. However, if ajump signal is received by the function decode, a DNIpulse is initiated. The jump signal may be repeateduntil the correct instruction is selected. When theDNI pulse is initiated and is in coincidence with aspecific clock pulse in the sequence control, a datarequest signal is applied to the program ofinstructions.SYMBOL GENERATOR.— The symbolgenerator operates in three major modes. The threemodes of operation are the line, circle, andanalog-to-digital conversion (ADC). Each mode isindependently and completely performed beforerepeating or starting a different mode. The mode tobe performed is initiated by the function decode in thedigital computer. Correct sequencing of each mode ofoperation is provided by the timing pulses from thecontrol logic section of the digital computer. TheFigure 5-8.-Heads-up display set block diagram.5-7
computer’s program determines which mode isinitiated in the symbol generator.Line Mode.— When a line is to be drawn on theCRT, the line mode signal goes to the input/outputbuffer of the symbol generator. This signal starts acounter that controls all operations of the generator.The first operation is to transfer the X 1 data frommemory to the X channel deflection register. It istransported through the adder and input/output bufferand control. The X 1 data is the digital equivalent ofthe analog voltage that drives the beam to the startpoint (in the horizontal axis) of the line draw.The second operation is to transfer the Y1 datafrom memory to the Y channel deflection register.The Y1 data is the digital equivalent of the analogvoltage that drives the beam to the start point (in thevertical axis) of the line draw. The digital data in eachof the deflection registers immediately converts to anequivalent analog voltage. This conversion takesplace in the X and Y channel digital-to-analogconverters (DACs). Each DAC holds the X and Ydeflection voltage until the input/output buffer andcontrol gates them to the HUD.The third operation transfers the X2 data frommemory to the parameter register. The X2 data is adigital quantity representing the line slope anglecosine.In the first half of the fourth operation, the X2data shifts from the parameter register to the Xchannel rate register. In the second half of thisoperation, the Y2 data transfers to the parameterregister from memory. The Y2 data is the digitalquantity representing the line slope angle sine.In the first half to the fifth operation, the Y2 datashifts from the parameter register to the Y channelrate register. In the second half of this operation, theT data transfers from memory to the parameterregister. The T data is a digital quantity representingthe length of the line draw (bright-up pulsewidth).During the sixth and seventh operations, the BITEcircuits check all data in the X and Y channel rateregisters for correctness. All the data required todraw a specific line is now within the symbolgenerator. The specific line to be drawn could be asymbol in itself or just part of a symbol.When all the data to draw a specific line is in thesymbol generator (after the seventh operation), thebusy signal from the HUD is sampled. If the busysignal is high, the operations stop until the busy signalis low. The low signal signifies that the HUD is readyto accept the data. At this time, the input/outputbuffer and control sends a start pulse to the parameterregister. This causes it to start down counting. Thedown counting controls the length of time thebright-up pulse is applied to the HUD. At the sameinstant, a gating pulse goes to each DAC. This allowsan analog voltage to go to the deflection circuits of theHUD. At the same time, the contents of the rateregisters either add to or subtract from the respectiveresidue register. This causes generation of either apositive or negative overflow. The overflow drivesthe deflection register up or down. This causes thestart point of the line to move in the direction of theline slope angle. After a preset time delay, a bright-uppulse goes to the HUD. The time delay compensatesfor the slower response time of the deflection circuitsin the HUD. The bright-up pulse continues until theparameter register has down counted to zero. Whenthe parameter register stops counting, the bright-uppulse turns off. At this time the end of the line modeis indicated to the digital computer. The line modemay be repeated as many times as necessary tocomplete the required symbol.Circle Mode.— When drawing a circle on theCRT, a circle mode signal goes to the input/outputbuffer and control. The signal starts the operationcounter as in the line mode. The data required to drawa circle in a specific location transfers to the symbolgenerator in the same manner as in the line mode.However, the X2 data is equal to negative one, and theY2 data is all zeros. The T data set into the parameterregister is the digital equivalent of one over the circleradius. Circles are drawn in a counterclockwisedirection, starting from the top. The overflow fromthe residue registers controls the direction and amountof change in each deflection register. However, in thecircle mode, the overflow also controls the circlelogic to the opposite channel. The circle logic is suchthat a positive X channel overflow causes the contentsof the parameter register to add to the contents of theY channel rate register. If the X channel overflow isnegative, then the contents of the parameter registersubtract from the Y channel rate register. Theopposite occurs if the overflow from the Y channelresidue register is positive. This will cause thecontents of the parameter register to subtract from theX channel rate register. If the Y channel overflow isnegative, the contents of the parameter register add tothe X channel rate register.This cross-coupling causes the two channels to beinterdependent on each other. As the rate of change in5-8
one channel increases, the rate of change in the otherdecreases. If the circle is large, the rate of change inthe analog defection voltage output is large. If thecircle is small, the analog voltage will be small. Therate of change is inversely proportional to the contentsof the parameter register, which contains the inverseof the circle radius. This causes the generator toproduce a circle with the desired radius.The bright-up pulse control is from a quadrantcounter in the input/output buffer and control. Thisturns on the bright-up pulse after the electron beamtravels halfway around the circle. This delaycompensates for the slow response time of thedeflection circuits in the HUD. The bright-up pulsestays on until the quadrant counter counts four times.A short time after the fourth count, the bright-up pulseturns off, and the symbol generator busy signalterminates. This completes the circle mode.Analog-to-Digital Conversion (ADC) Mode.—The third mode of symbol generator operation is theanalog-to-digital conversion mode. In this mode, theoperation of both the X and the Y channels are thesame. Therefore, only the X channel operation isdescribed. At the start of the ADC mode, the mostsignificant bit in the parameter register becomespreset to the one level.The rate and deflection registers are preset to zeroand coupled directly to each other. The directcoupling of the two registers provides for duplicationof the contents of either register.The third step gates a specific analog voltagefrom the X channel input selector to one side of the Xchannel comparator.The fourth step gates the digital-to-analogconverter (DAC) voltage from the X channel DAC tothe other side of the X channel comparator. The DACvoltage represents the contents of the X channeldeflection register. If a difference in voltage levelexists between the two applied voltages, thecomparator has an output applied to the deflectionregister. The output of the comparator represents thesign of the difference. This output causes the contentsof the parameter register to add to or subtract from thecontents of the rate register.On the next operation, the one in the parameterregister shifts to the next lower bit location, and thevoltage comparison phase repeats. This processcontinues until the parameter register reaches zero.When at zero, the contents of the rate register (indigital form) are equal to the input selector analogvoltage at the comparator. The next operationtransfers the contents of the rate register to memoryby way of the data feedback (DFB) lines. In lateroperations, the remaining analog voltages go to thecomparator, and the entire process repeats. The ADCmode continues until all analog voltages areconverted to digital data and stored in memory.Heads-Up Display UnitAircraft ac power applied to the low-voltagepower supply is rectified, and then divided into sevendifferent dc levels for distribution throughout thedisplay. A transistorized oscillator in the high-voltagepower supply receives 24 volts of dc excitation fromthe low-voltage power supply. The oscillator outputis applied to a voltage multiplier and rectifier circuit,which increases the input voltage to 15,000 volts.The 15,000 volts are applied to the CRT anode and avoltage divider within the high-voltage power supply.Outputs from the voltage divider are used to controlthe oscillator frequency and a comparator output. Thecomparator senses any differences that may existbetween the voltage divider output and a fixedreference voltage. If the high voltage drops below aprescribed level, a fail signal is generated by thecomparator and applied to the BITE circuit.OPTICAL MODULE.— The optical modulecontains the standby reticle, in-range indicator,control panel, autobrilliance sensor, and lens unit.The standby reticle is used only when the HUD isinoperative, and is controlled electrically andmechanically from the control panel. Electricalpower used for the operation of the standby reticle isobtained from outside the HUD.Light emitted from the standby reticle istransmitted through the lens unit to the combiner. Thein-range indicator indicates when a range discretesignal is received from the forward-looking radar set.Symbols are represented by light emitted from a CRTlocated in the video module. As symbols are drawnon the CRT face, the emitted light is received by thelens unit and applied to the combiner. The desiredlevel of brightness is selected from the control panelby adjustment of the voltage level applied to thecathode bias circuit. The autobrilliance sensor is usedto detect ambient light changes. Any change inambient light proportionally changes the outputvoltage level of the autobrilliance sensor.VIDEO MODULE.— The video module containsthe bright-up and autobrilliance amplifiers, cathode5-9
ias circuit, horizontal and vertical deflection coils,and CRT. Symbols are drawn at the rate of 50 times asecond on the CRT. The rapidly moving electronbeam is generated by the bright-up pulse from thesignal data processor. The bright-up pulse isamplified by the bright-up amplifier, and then appliedto the CRT grid. The CRT, which is normally biasedinto cutoff, is turned on, and an electron beam isemitted. The electron beam strikes the CRT face at aposition determined by the amount of current flowingin the horizontal and vertical deflection coils. Theamount of light (symbol brightness) emitted from theCRT is controlled by the cathode bias circuit. Acontrol voltage from the control panel is applied to thecathode bias circuit, which serves as a referencevoltage for the autobrilliance sensor and the CRTcathode. The voltage output from the autobrilliancesensor is amplified by the autobrilliance amplifier.The output is applied to the cathode bias circuit,which changes the amount of bias (brightness) on theCRT. Thus, an optimum CRT contrast is constantlymaintained under varying ambient light.DEFLECTION MODULE.— The deflectionmodule contains the X and Y deflection amplifiers, Xand Y low amplifiers, X and Y comparators, and oneOR gate. The type and location of each symbol on thecombiner is determined by X and Y analog voltagesapplied to the deflection circuits. As the need for asymbol arises, the busy signal from the HUD issampled by the symbol generator. The busy signal isgenerated any time current is flowing in eitherdeflection coil. Comparators, connected across eachcoil, are used to detect when the deflection coilcurrent is equal to zero. As the current in eitherdeflection coil reaches zero, the output from thecomparator, connected across the coil, goes low.When both comparator outputs are low, the OR gateoutput goes low, and the busy signal is removed fromthe symbol generator input. At the same instant, thesymbol generator applies a precise analog voltage tothe X and Y deflection amplifiers. The output fromthe deflection amplifiers causes current to flow in thedeflection coils. The current amplitude isprecalculated to drive the CRT electron beam to thestart point of the symbol to be drawn. A bright-uppulse is then applied to the bright-up amplifier in thevideo module. At the same instant, the deflectionvoltage is modulated at a predetermined rate andamplitude by the symbol generator. The modulationis detected by the deflection amplifiers and applied toeach deflection coil. A specific part (or all) of asymbol is then drawn on the CRT face in a preciselocation. The bright-up pulse continues long enoughto draw the prescribed line or circle that makes up thesymbol. When the bright-up pulse is removed, theCRT is driven into cutoff until the next bright-uppulse is applied. This process is repeated until allsymbols have been displayed on the CRT.BITE FunctionsBoth the signal data processor and the heads-updisplay unit contain built-in test equipment (BITE).SIGNAL DATA PROCESSOR.— The built-intest equipment contained in the signal data processorconsists of a clock pulse monitor, data test equipment,raw data test equipment, six low-voltage comparators,a signal data processor fail indicator, and a thermaloverload sensor.HEADS-UP DISPLAY UNIT.— The built-in testequipment contained in the HUD unit consists of ahigh-voltage comparator, seven low-voltagecomparators, a bright-up parity circuit, a HUD failindicator, and a thermal overload sensor.SYMBOLOGYThe symbols that are used with the various modesof operation in the F-14 are listed and described infigure 5-9. These symbols give the pilot importantinformation, such as aircraft attitude, heading,altitude, angle-of-attack, and ground track duringflight. Attack information, such as closure rate, rangeto target, maximum range for weapon launch,minimum range for weapon launch, and boresightreference, is available during air-to-air andair-to-ground operations. Ordnance information,such as number of rounds remaining, the type ofweapon selected, and the number of weapons readyfor launch, is also available.DECLUTTERThe system used in the F-14 (AVA-12) has afeature known as declutter. It is used to removepreselected, unwanted symbols from the displayduring certain modes of operation. This feature isespecially important during an air-to-air situation.When the pilot is trying to locate and engage anenemy target, the declutter feature will clear theunnecessary symbols from his/her view.5-10
Figure 5-9.-Symbology.5-11
Figure 5-9.-Symbology—Continued.5-12
Figure 5-10.-Takeoff mode.MODES OF OPERATIONThere are five basic modes of operation. Thesemodes are takeoff, cruise, air-to-air (A/A),air-to-ground (A/G), and landing.TakeoffThe takeoff mode is shown in figure 5-10. Thismode is used during takeoff and displays verticalspeed, altitude, and aircraft attitude.CruiseThe cruise mode is shown in figure 5-11. ThisFigure 5-12.-Gun mode.another. The display gives the pilot attitudereference, magnetic heading, and various weaponinformation.Air-to-AirFigures 5-12, 5-13, 5-14, and 5-15 are examplesof the air-to-air mode. These displays give the pilotattack data with the various types of A/A weaponsselected. In addition to attitude reference, the weaponFigure 5-11.-Cruise mode.Figure 5-13.-Sidewinder mode.5-13
Figure 5-14.-Sparrow mode.Figure 5-16.-Air-to-ground mode.along with various types of target information.Air-to-GroundThe air-to-ground mode is shown in figure 5-16.This mode is used primarily for the delivery of bombsor other types of A/G weapons. Along with thenavigational information, it shows bomb ballistic andtarget information.LandingThe landing mode is shown in figure 5-17. Thisdisplay shows the pilot radar altitude,vertical-descent, angle-of-attack, and velocityFigure 5-15.-Phoenix mode.Figure 5-17.-Landing mode.5-14
information. This mode is used when the aircraft ismaking an approach to an airfield or a carrier until thepilot has visual contact with the field.TACTICAL DISPLAY SYSTEM(NON-HUD)Learning Objective: Recognize componentsand functions of a non-HUD tactical displaysystem.The AN/ASA-82 TDS is installed on the S-3aircraft. This system is representative of ASWtactical display systems in use by the Navy.The AN/ASA-82 consists of five indicators and adigital-to-analog converter. The digital-to-analogconverter is commonly called a “display generatorunit” (DGU). Three of the indicators aremultipurpose displays (MPDs), which, with a fewexceptions, can display all pertinent mission datadeveloped within the aircraft. These MPDs arelocated at the TACCO (tactical coordinator), SENSO(sensor operator), and copilot stations. Because thecopilot assists the TACCO during an ASW mission,the copilot station is referred to as the COTAC station.At the SENSO station, there is an additional indicatorused to display acoustical data. This is the auxiliaryreadout unit (ARU). The fifth indicator in the systemis located at the pilot’s station. This indicator displaystactical plot data required to maintain aircraft positionwhile the aircrew is searching for or prosecuting asubmarine.PILOT DISPLAYThe pilot display presents the key elements of theTAC (tactical) plot, selected alerts, and peripheralinformation. The data presented on the display isproduced by the GPDC, and is controlled by aircrewmembers through their integrated control system(INCOS) panels. The basic pilot display format isshown in figure 5-18.COPILOT/COTAC DISPLAYThe copilot/COTAC display provides the videopresentations listed below:Alerts and cues for the GPDCTableaus containing GPDC-stored dataTactical plot (TAC plot) composed of symbols,vectors, and conicsFLIR (Forward-looking infrared)MADBTScan-converted radarTest patternsDISPLAY GENERATOR UNITThe display generator unit generatesalphanumeric characters, conics (curved lines), andvectors (straight lines). These graphic symbols aresent to all MPDs and to the pilot’s display. However,the DGU does not send all data types to all displays.The data capabilities of each display will be discussedlater in this chapter. The DGU also positions all videodata in the proper place on the display. Display data isprocessed through four processing channels, whichare interchangeable, to supply the data for the fourcrew stations. When a processor channel fails, it isidentified and reported to the general-purpose digitalcomputer (GPDC) by the operation of the built-in testequipment at each station.Figure 5-18.-Pilot display format.5-15
TACTICAL DISPLAY SYSTEM INTERFACEFigure 5-19.-Copilot/COTAC display format.As was previously mentioned, the TDS is theprimary means used by the GPDC to presentinformation to the operators. As shown in figure5-21, the GPDC sends commands to the DGU. TheDGU interprets them, determines the operating mode,and generates the requested symbols or displays. TheDGU also regulates the data flow rates from the FLIR,radar, and the ADP to allow direct interface betweenthese systems and the TACCO, SENSO, and COTACstations. The pilot’s display receives video data fromthe DGU only. The SENSO ARU interfaces with theADP only.The basic copilot/COTAC display format isshown in figure 5-19.TACCO AND SENSO DISPLAYSThe TACCO display provides the videopresentations listed below:Alerts and cues from the GPDCTableaus containing GPDC-stored dataTAC plot composed of symbols, vectors, andconicsAnalog acoustic data from the acoustic dataprocessor (ADP) in the form of frequency,bearing, and range information from activesonobuoys (pingers) and signal strength frompassive sonobuoysFLIRMADBTTELEVISIONLearning Objective: Recognize componentsand operating fundamentals of a televisionsystem.Television can be defined as the transmission andreception of visual images by means of electricalsignals from one point to another. There are threebasic elements in all television systems. Theseelements are as follows:. A pickup device to convert an optical imageinto an electrical signal.. A means of transmitting that signal from onepoint to another.. A reproducing device to convert the eleclricalsignal into an optical image.Pickup devices, or camera tubes, include imageorthicons, image isocons, vidicons, plumbicons, andsecondary electron conduction (SEC) tubes.Scan-converted radarRaw radarTest patternsThe TACCO and SENSO display formats areidentical, and are shown in figure 5-20.SENSO ARU DISPLAYThe SENSO ARU displays analog acoustic datafrom passive sonobuoys. This data includesfrequency, bearing, and signal strength.Figure 5-20.-TACCO and SENSO display format.5-16
Figure 5-21.-TDS Interface block diagram.Transmitting devices include coaxial lines, low- orhigh-power transmitters, or microwave relay links.The reproducing device is a television receiver, atelevision monitor, or some form of electro-opticalprojection system.This chapter will discuss the camera tubes(pickup devices) and picture tubes (reproducingdevices). For most uses in aircraft, coaxial cablesprovide the means for transmitting the video signalsfrom the pickup to reproducing devices.TELEVISION FUNDAMENTALSTelevision transmission of a picture from onepoint to another involves a process in which light,reflected from an object or scene, is converted intoelectrical impulses of varying magnitude. Thisprocess is accomplished by means of synchronizedscanning. In synchronized scanning, the picture isexamined by the camera and reproduced by theviewing monitor. This is done point-to-point and in aregular pattern. The process is carried out so rapidlythat the entire picture is scanned many times eachsecond, and the eye sees it as a single complete image.The basic television system is shown infigure 5-22. Notice that it consists of a transmitterand a monitor. An image of the scene is focused onthe camera pickup device. An electron beam in thedevice scans the optical image and produces anFigure 5-22.-Basic television system.5-17
electrical signal, which varies in amplitude with theamount of light that falls on each point of the image.A synchronizing signal is added to the electricalsignal from the camera. The resultant compositevideo signal is then transmitted to the monitor.In the monitor, the synchronizing signal causesthe beam to scan the picture tube (kinescope)faceplate in synchronism with the camera scanningbeam. The intensity of the beam is varied inaccordance with the picture signal. The varying beamcauses the image to appear on the face of the picturetube.The time required for one vertical scan of thepicture in broadcast television systems in the UnitedStates is 1/60 of a second (60 Hz) or a multiple orsubmultiple thereof. The rate of 60 Hz was chosenbecause most commercial electrical power sources inthe United States operate at a frequency of 60 Hz.Synchronization with the 60-Hz power frequencyreduces the visible effects of hum and simplifies theproblem of synchronizing film projectors withscanning.ScanningScanning is the process of breaking up the sceneinto minute elements, and using these elements in anorderly sequence. Reading a printed page is similar toscanning. You start at the beginning of one line andmove to the right, word by word, until you reach theend of the line. Then you jump back to the beginningof the next line and repeat the process until you reachthe end of the page. In television, this process is doneto the picture.number of lines. The present system of 525 lines waschosen for broadcast television as the most suitablecompromise between channel width and pictureresolution. This system is also used in manyclosed-circuit televisions (CCTV).NONINTERLACED SCANNING.— This is thesimplest method of scanning. It is also known assequential or progressive scanning. Noninterlacedscanning uses an electron beam that moves veryrapidly from left to right on an essentially horizontalline. It travels slowly from the top to the bottom ofthe picture. When the electron beam reaches the endof a line, a blanking voltage is applied, which shutsoff the beam. The period of time the beam is shut offis known as the horizontal retrace period or flybacktime. Similarly, when the beam reaches the bottom ofthe picture, the beam is again blanked, and returns tothe top of the picture. This period of time is known asvertical retrace or flyback time.INTERLACED SCANNING.— An importantvariation of the scanning method is known asinterlaced scanning. It is the method used bybroadcast television and most CCTV equipment.With interlaced scanning, it is possible to reduce thevideo bandwidth by a factor of two without reducingthe resolution or seriously increasing flicker.In the standard two-to-one method of interlacing,alternate lines are seamed consecutively from top tobottom. Then, the remaining alternate lines areseamed. This principle is shown in figure 5-23. InScanning MethodsThe number of scanning lines determines themaximum ability of the system to resolve fine detailin the vertical direction. Also, the number ofscanning lines is related to the resolution ability in thehorizontal direction. Resolution is determined by thenumber of scanning lines. For a given videobandwidth and frame time, horizontal resolution isinversely proportional to the number of lines.Therefore, as the scanning lines are increased innumber, the bandwidth of the system must also beincreased in the same ratio to maintain the sameresolution in the horizontal direction.Maintaining approximately equal values ofhorizontal and vertical resolution is ideal. Thebandwidth requirements increase as the square of theFigure 5-23.-Interlaced scanning.5-18
this type of scanning, each of the two groups ofalternate lines is called a field, and the frame is madeup of two fields. Interlacing is accomplished bymaking the total number of lines in a frame an oddinteger. Thus, the number of lines in each of the fieldsis an even number plus one-half line. This results inconsecutive fields that are displaced in space withrespect to each other by one-half of a line. The totalnumber of lines is 525, the total lines per field is262 1/2, the vertical scanning frequency is 60 Hz, thenumber of frames per second is 30, and the horizontalscanning frequency is 15,750 Hz (60 x 262 1/2).Television SignalsThe standard television signal consists of thefollowing four elements:1. The picture information2. The picture blanking pulses3. The picture average dc component4. The picture synchronizing pulsesThese four elements are discussed in thetext.followingPICTURE INFORMATION.— The pictureinformation is the basic part of the signal. It is aseries of waves and pulses generated during activescanning of the camera tube. As the scanning linetravels across the tube, it is amplitude modulated inproportion to the brightness variation in the scene it isscanning. For commercial television, the amplitudevariations are such that the maximum video amplitudeproduces black, and the minimum amplitude produceswhite. Ordinarily, the maximum and minimum videoamplitude values represent 75 and 15 percent of themaximum carrier voltage, respectively.PICTURE BLANKING PULSES.— To preventundesirable signals from entering the picture duringretrace time, blanking pulses are applied to thescanning beams in both the camera tube and thereceiver picture tube (kinescope). Camera blankingpulses are used only in the pickup device. They serveonly to close the scanning aperture on the camera tubeduring retrace periods, and never actually appear inthe final signal sent to the receiver. In some systems,the same pulse that triggers the seaming circuit andblanks the kinescope also closes the camera aperture.The function of the kinescope blanking pulses isto suppress the scanning beam in the kinescope duringboth vertical and horizontal flyback times. Thekinescope blanking pulses are simple rectangularpulses, somewhat wider than the correspondingcamera blanking pulses. They have a durationslightly longer than the actual retrace time. Thereason for the slightly longer blanking time is to trimup the edges of the picture and to provide a clean,noise-free period during flyback. Figure 5-24 showsa complete video signal that contains pulses for theremoval of visible lines during horizontal retraceperiods only. The horizontal pulses recur at intervalsof 1/15,750 of a second. At the bottom of the picture,they are replaced by vertical blanking pulses. Theseare similar to the horizontal pulses, except they are ofmuch longer duration (approximately 15 scanninglines) and have a recurrence of 1/60 of a second.Note that the blanking pulses (and synchronizingpulses) are added at a relatively high-level point in thetransmitter because they are considered to beFigure 5-24.-The complete video signal for three scanned lines.5-19
noise-free at that level. The importance of noise-freeblanking and synchronizing pulses should beemphasized. They determine the stability of theviewed picture or the degree to which a pictureremains locked-in on the picture tube, even under themost adverse transmission conditions. This isimportant when considering the use of televisionsignals for close-circuit applications. The extremeenvironmental conditions that may be encounteredcan seriously degrade the picture signal. This makesit difficult to synchronize or lock-in a picture unlessthe original blanking-to-picture and signal-to-noiseratios are high.PICTURE AVERAGE DC COMPONENT.— Ifa television picture is to be transmitted successfullywith the necessary fidelity, it needs the dc componentof the picture signal. This component is a result ofslow changes in light intensity. The loss of the dccomponent occurs in ac or capacitive couplingcircuits. The loss is evidenced by the picture signaltending to adjust itself about its own ac axis. The dccomponent is returned to the video signal by means ofa dc restorer or inserter circuit.PICTURE SYNCHRONIZING PULSES.—Synchronizing the scanning beams in the camera andthe receiver must be exact at all times to provide aviewable picture. To accomplish this, synchronizinginformation is provided by electrical pulses in theretrace intervals between successive lines andbetween successive pictures (fig. 5-24). The retraceperiods should be as short as circuit considerationswill allow. These periods are in areas wheresynchronization pulses may be inserted withoutinterfering with the picture.Synchronizing pulses are generated in theequipment that controls the timing of the scanningbeam in the pickup device. They become a part of thecomplete signal that is transmitted to the receiver. Inthis manner, scanning operations at both ends of thesystem are always in step with each other. In general,synchronizing signals should provide positivesynchronization of both horizontial and vertical sweepcircuits. They should be separable by simpleelectronic circuits to recover the vertical andhorizontal components of the composite sync signal.They should be able to be combined with the pictureand blanking signals to produce a standard compositetelevision signal.Most television systems produce synchronizinginformation that conforms to the basic requirementsof synchronization. Figure 5-24 shows how thesynchronizing signal waveform is added to the pictureinformation and blanking signals to form a completecomposite picture signal ready to be transmitted.Note that the duration of the horizontal sync pulses isconsiderably shorter than that of the blanking pulses.Vertical sync pulses are rectangular, but they are ofmuch shorter duration than the horizontal pulses.Thus, they provide the necessary means for frequencydiscrimination.Synchronization presents a difficult problem asmore failures occur from the loss of properinterlacing. Discrepancies in either timing oramplitude of the vertical scanning of alternate fieldscause displacement in space of the interlaced fields.The result is nonuniform spacing of the scanninglines. This reduces the vertical resolution and makesthe line structure of the picture visible at normalviewing distance. The effect is usually known as“pairing.”Another series of pulses is added before and afterthe vertical sync pulses to prevent the pairing problemand to maintain continuous horizontal synchronizinginformation throughout the vertical synchronizationand blanking interval. These are equalizing pulses(fig. 5-25). The time between the last horizontal syncpulse and the first equalizing pulse changes from afull horizontal line interval to one-half of a horizontalline interval every other field. This is caused by theratio between 15,750 Hz and 60 Hz. The ratioproduces the necessary difference between fields toprovide interlaced scanning. Since the horizontaloscillator is adjusted to the frequency of the horizontalsync pulses, it is triggered only by every otherequalizing pulse or serration of the vertical sync pulse.Other SystemsCommercial broadcasting and many closedcircuitinstallations adhere closely to the synchronizationsignal specifications just discussed. There aresome noncommercial and closed-circuit installationsthat use less rigorous sync signal specifications. Wewill now discuss four categories of these signals.RANDOM INTERLACE, NO SPECIALSYNC PULSES.— The random interlace is thesimplest television method. It provides no specialsync pulses and no fixed relationship between thehorizontal and vertical scanning raster. Synchronizationinformation at the monitor is obtained from thehorizontal and vertical blanking pulses contained inthe video signal. Figure 5-26, view A, shows this typeof video signal. Usually at the camera control5-20
Figure 5-25.-Vertical synchronizing and equalizing pulses.location, sufficient blanking signal is added to thevideo signal to provide an adequately long and steeptransition at both vertical and horizontal frequenciesto provide lock-in.Some monitors may have problemssynchronizing with this information. Electrical noiseis a possible condition when the camera and monitorare separated by a great distance. The lock-in of sucha signal becomes extremely difficult. Note in figure5-26, view A, that there are no horizontal sync signalsduring vertical blanking time. The horizontalfrequency circuit in the monitor is essentiallyfree-running during this time. This circuit has thetendency to keep on the proper frequency, but it couldget off frequency. This is not a problem during theblanking time. However, when the horizontal syncsignals return, it may have trouble synchronizing tothe new information.The most undesirable characteristic of this systemis insufficient resolution caused by the lack ofinterlace. Good interlace is not possible because anabsolute frequency relationship between thehorizontal and vertical frequencies is lacking. Thenominal vertical frequency is usually 60 Hz. Thehorizontal frequency (usually established by afree-running oscillator) is nominally 15.75 kHz.There is no direct relationship between the twofrequencies as required for good interlace. Theadvantages of this system are reduced costs andgreater simplicity of circuits. However, marginalresolution capabilities, incompatibility, marginalstability, and general reduction of systemperformance limit its application and use.ODD-LINE INTERLACE, NO SPECIALSYNC PULSES.— The odd-line interlace systemwith no special sync pulses has a distinct advantageover the previous system. A definite relationshipexists between the horizontal scan frequency and thevertical field rate. This system (waveform seen infigure 5-26, view B) can effectively use the 2:1odd-line interlace technique. Therefore, it provides aconsiderable improvement in the resolutioncapabilities of the system. In theory, the verticalresolution should be double that of the previoussystem. However, the improvement in resolution issomewhat less since it is difficult to obtain perfectinterlace.Figure 5-26.-Nonstandardized television waveforms.5-21
Like the random interlace, this system does notprovide a special synchronizing signal; therefore, it issubject to the same synchronizing limitationsdiscussed previously. These limitations become animportant problem in the more elaborate installationswhere a series of cameras and monitors might beseparated by wide distances. For this reason,installations using these systems are usually thesmaller, less complex applications, where stabilityand reliability may not be an important factor.ODD-LINE INTERLACE, MODIFIED SYNCPtILSES.— The odd-line interlace method withmodified sync pulses provides further advantagesover the previous two systems. However, it has aconsiderable number of limitations. In this system,special synchronizing pulses have been added to thevideo waveform (fig.5-26, view C).Note that the synchronizing signal has been addedto the tip of each horizontal blanking pulse. The syncpulses also continue through the vertical blankinginterval. They provide synchronizing information forthe monitor horizontal frequency-locking circuits atall times. These circuits are no longer free-runningduring the vertical blanking interval. Addition ofthese special sync pulses greatly improves the lock-inability of the composite video signal under adverseconditions of noise and spurious signals.SLOW-SPEED SCAN.— A television system thatis being used frequently has a slow-speed scantechnique. This technique represents a radical departurefrom the nominal scanning standards. It permits a sceneto be picked up and transmitted successfully from onelocation to another, if the scene contains a limitedamount of action or movement and a great deal ofredundancy. It affords fair resolution and fidelity insignals transmitted over relatively economicalnarrow-band transmission facilities. For example, aslow-speed camera located in a bank, a message center,or a newspaper office can scan printed information andtransmit it to a distant location over ordinary telephoneline facilities. Some methods are able to transmitpictures having more action, such as a person talking,with reasonable clarity. Such methods, however,require a somewhat greater bandwidth.Most slow-speed scan systems use a much slowerscanning rate, with a correspondingly narrowerbandwidth, than present telecasting standards.Broadcasting systems transmit a picture every 1/30 ofa second, with a 4-MHz bandwidth. Slow-scansystems transmit a picture in 1/10 of a second to 2seconds, with a video bandwidth ranging fromapproximately 250 kHz to as low as 500 Hz.Most slow-speed scan systems are practicalwhere time is available for transmission. Forexample, the information contained in a 5-minutecommercial television program requires several hoursof time to be transmitted with comparable detail bythe average slow-speed scanning system. Theadvantages of the slow-speed system are greatlysimplified equipment and relatively inexpensivetransmission facilities. The disadvantages are that thescene content is limited to relatively immobileobjects, resolution is marginal, and the system isincompatible with standard television systems.Rather complex scan conversion equipment isrequired to make the two systems compatible. Exceptfor certain special applications, slow-speed scansystems are inferior in performance and cannot beused successfully where a high degree of resolutionand detail is required.COMPONENTSThe pickup devices and picture tube basics arediscussed in the following text.Camera TubesTo assure high-quality images at the picture tube, thecamera must resolve the scene into as many pictureelements as practical. The quality of the picture increasesas the number of elements increase. The pickup tubemust produce signals that accurately represent eachelement. The optical-electrical conversion must have asignal-to-noise ratio high enough to assure effectivepickup sensitivity at the lowest light level that may betransmitted. Ideally, when there is no light present, thereshould be no output signal.The type of camera tube used is determined by theintended use of the camera and the amount ofavailable light. The amount of light required by acamera tube is rated in candelas. The minimumnumber of candelas required by a camera tube is ameasure of the tube’s sensitivity. The following typesof tubes are in use today.IMAGE ORTHICON.— The image orthicon(fig. 5-27) is an ultrasensitive television camerapickup tube. The tube requires only 8 to 40 candelasfor light, and is used in modern conventional andCCTV systems. When this tube is used, a light imagefor the subject (arrow at extreme left in figure) ispicked up by the camera lens and focused on thelight-sensitive face of the tube. This causes electronsto be released from each of the thousands of tinyglobules in proportion to the intensity of the lightstriking it.These electrons are directed on parallel coursesfrom the back of the tube face to the target, from which5-22
Figure 5-27.-Image orthicon tube.each striking electron liberates several more electrons,leaving a pattern of propottionate positive charges on thefront of the target. When the back of the target is scannedby the beam from the electron gun in the base of the tube,enough electrons are deposited at each point to neutralizethe positive charge. The rest of the beam returns to aseries of electron multiplier stages or dynodessurrounding the gun.Each dynode is a metallic disk with openingssimilar to a pinwheel, and operates at a positivepotential of 200 to 300 volts greater than thepreceding dynode. Multiplication occurs throughsecondary emission at each dynode. If five dynodestages are used, each having a gain of 4, a gain of1,000 (4 x 4 x 4 x 4 x 4) is realized in the multipliersection. Now, consider dynodes with a gain of 5.The overall gain would be 5,000. This setup wouldallow the pickup tube to operate with relatively lesslight than the plumbicon or vidicon (to be discussedlater). The electrons from the last dynode are routedthrough a signal-developing resistor to an extremelyhigh B+ voltage. The output signal is then coupled tothe first stage of video amplification in the camera.IMAGE ISOCON.— The image isocon tube(fig. 5-28) is similar to the image orthicon inconstruction and operation. The main difference isFigure 5-28.-Image isocon tube.5-23
The polarity of the signal developed by the isoconis opposite to the polarity of the signal of the orthicon.In the isocon, the maximum number of scatteredelectrons occurs at the highlights of the picture, whilevirtually no scattered electrons occur in the dark.This produces a signal that has much less noise in thelower lights. It also improves the ability of the tube tohandle a very wide range of light levels withoutrequiring additional camera adjustments.Figure 5-29.-Image isocon target.the method of extracting the video information fromthe returned electron beam. The image isocon usesscanning beam electrons scattered by thepositive-stored charges on the target. Figure 5-29shows this method of signal generation.When the primary scanning electron beam hits thetarget, three events occur. Some of the electronsneutralize the target, some electrons reflect back tothe gun, and some electrons scatter as they hit thetarget. Instead of using the reflected electrons, theimage isocon uses the scattered electrons. Theseelectrons, as well as the reflected electrons, returntoward the electron gun. At the gun end of the tube,the reflected electrons are separated from thescattered electrons. The scattered electrons go to anelectron multiplier that amplifies the signals beforethey are taken out of the tube.The image isocon is useful in very low-lightapplications where there is a wide range of scenecontrast. It is also useful where a low-noise signal isimportant in low-light areas.VIDICON.— The vidicon camera tube (fig. 5-30)has a transparent conductive coating on the innersurface of the faceplate. This coating is known as thesignal electrode. The signal electrode has a layer ofphotoconductive material deposited on it. When lightfrom the scene being televised passes through thefaceplate and is focused on the photoconductive layer,the resistivity of this material (which has beenextremely high) is reduced in proportion to theamount of light reaching it. Because the potentialgradient between adjacent elements in thephotoconductive layer is much less than the potentialgradient between opposite sides of the layer, electronsfrom the beam side of the layer leak by conduction tothe other side between scans of the electron beam.Figure 5-30.-Structure of a vidicon tube.5-24
Consequently, the potential of each element on thebeam side approaches the potential of the signalelectrode side. It will reach a value that varies withthe amount of light falling on the element. On thenext scan, the electron stream replaces a number ofelectrons on each element, just sufficient to return itto the potential of the cathode. Because eachelement is effectively a small capacitor, a capacitivecurrent is produced in the signal electrode circuitthat corresponds to the electrons deposited as theelement is scanned. When these electrons flowthrough the load resistor in the signal electrodecircuit, a voltage, which becomes the video signal,is produced.plate. As the low-velocity scanning beam strikes eachcharged element, it releases electrons that neutralizethe capacitors.SECONDARY ELECTRON CONDUCTION(SEC).— This is a vidicon-like tube with a specialtarget that uses secondary electron conduction. In thistube, light is focused on the photocathode that emitselectrons into the tube. These electrons are focused toform an image of electron streams that strike the SECtarget. The electrons are accelerated to approximately10,000 electron volts by the time they strike the target.The SEC target intercepts these streams of electrons.A great number of secondary electrons from eachPLUMBICON.— The plumbicon is similar inappearance and operation to the vidicon. It hasseveral advantages over the vidicon. Theplumbicon has a more rapid response and produceshigh-quality pictures at lower light levels. Becauseof its small size and low power consumption, theplumbicon is well suited for use in transistorizedTV cameras. Its simplicity and spectral response toprimary colors make it particularly useful in colorcameras.A unique feature of the plumbicon is that its colorresponse can be varied by the manufacturer. It is,therefore, available with spectral responses for eachof the primary colors. The color response of eachtube is identified by the letter R (red), G (green), or B(blue) following the basic number. For example, aplumbicon for a green channel may be designated55875G.A simplified diagram of a plumbicon target isshown in figure 5-31. The faceplate (view A) has itsinner surface coated with tin dioxide. This thin,transparent layer is the signal plate of the target. Thetin dioxide itself is a strong N-type semiconductor.Two layers of lead oxide are deposited on thescanning side of the target. The first of these two isalmost pure lead oxide. Lead oxide is an intrinsicsemiconductor. The second layer of lead oxide isdoped to form a P-type semiconductor. As shown inview B of figure 5-31, the three layers form a P-I-Njunction.Light from the televised scene passes through thelayer of tin dioxide and is focused on thephotoconductive lead oxide. Notice in view C offigure 5-31 that each picture element charge acts likea capacitor whose positive plate faces the scanningbeam. The target signal plate forms the negativeFigure 5-31.-Plumbicon target.5-25
The SEC tube has applications in extremelylow-light, nighttime military TV systems where ahigh internal amplification and a fast speed orresponse to moving images are important.Picture TubesFigure 5-32.-SEC camera tube target operation.electron striking the target are emitted and stored(fig. 5-32).The photoelectrons possess sufficient energy topenetrate the thin, metallic signal and support plate.As they travel through the porous potassium-chloridelayer, many secondary electrons are emitted as thebeam strikes the interlined particles. Thesesecondary electrons either escape to the positivecollector screen or they travel through the spaces ofthe porous layer to the positive collector plate. Thisloss of electrons produces a positive charge on thescanned side of the target. Several hundred secondaryelectrons are emitted for each incident electron,producing a substantial gain at the target.The video signal is developed from the target bythe scanning beam discharging the positively chargedareas of the target in the same manner as in a vidicontube. This charging current, flowing out of the signalplate connection, is then amplified by an externalamplifier.A monochrome picture tube is a specialized formof the cathode-ray tube. An electron gun in the tubedirects a beam of electrons toward a fluorescentmaterial on the screen. The screen glows when struckby the electrons. Between the gun and the screen aredeflection coils that deflect the beam horizontally andvertically to form a raster. The brightness of thepicture is controlled by varying the grid-bias voltagewith respect to the cathode voltage. This bias can bechanged by varying either the cathode voltage or thegrid voltage.Color picture tubes operate on the same basicprinciple as monochrome picture tubes. Thedifference between the two systems is the types ofphosphors that coat the screen. The different types ofphosphors produce colors when struck with theelectron beam. Three basic or primary colors are usedin combination to produce all the other desired colors.These primary colors are red, green, and blue. In athree-gun color picture tube (fig. 5-33), there is aseparate gun for each of the color phosphors. Thetube’s screen consists of small, closely spacedphosphor dots of red, green, and blue. The dots arearranged so a red, green, and blue dot form a smalltriangle. The shadow mask provides a centering holein the middle of the triangle of dots. The convergenceelectrode causes the three separate electron beams tomeet and cross at the hole in the shadow mask.Figure 5-33.-Color picture tube.Figure 5-34.-Color picture tube. A. Side view. B. Front view.5-26
Each electron gun is electrostatically focused by acommon grid voltage. In other words, each gun hasits own electrode, but all three are connected togetherrequiring only one grid voltage. The three electronbeams scan the screen and are controlled by thedeflection yoke mounted externally around the neckof the tube. As the three beams scan the phosphorscreen horizontally and vertically in the standardscanning pattern, the dot triads light up according tothe video input signals (fig. 5-34).The purifying coil produces a magnetic fieldwithin the tube that aligns the electron beams parallelto the neck of the tube. Rotating the purifying coiladjusts the electron beams so they strike theirrespective color dots without striking neighboringdots. When this adjustment is made for the red dots,the other two electron beams are aligned as well.The high-voltage anode is a metallic ring aroundthe tube. The field neutralizing coil aids color purityat the outer edges of the picture tube. A metal shield,called a mu-metal shield, is placed around the bell ofthe tube to prevent stray magnetic fields fromaffecting the electron beams.Q1.Q2.Q3.Q4.Q5.Q6.Q7.Q8.Q9.Q10.Q11.Q12.REVIEW QUESTIONSWhich heading indicator displays the mostinformation?Are the three control boxes in the HSI groupinterchangeable between the stations?On the BDHI, what is the lubber index?What does HUD stand for?What does TDS stand for?What is a combiner, as used with the HUDsystem?How many different dc voltages are used inthe HUD unit?In the HUD system how many basic modes ofoperation are there?The SENSO ARU receives inputs from whatsource?What is another term for a camera tube?What process is referred to as scanning?How many elements are contained in astandard television signal?5-27
CHAPTER 6INFRAREDThe term infrared is a Latin word meaningbeyond the red. Infrared is commonly shortened toIR. The process of detecting or sensing infraredradiation from a target without being in physicalcontact with that target is known as remote sensing.Active and passive systems are used for remotesensing.Active systems send a signal to the target andreceive a return signal. Radar sets are examples ofactive systems. Passive systems detect a signal ordisturbance originating at the target. The signal maybe emitted either by the target or another source.Photography using natural light is an example of apassive system.Humans can see only a small part of the entireelectromagnetic spectrum. However, even though wecannot see them, other parts of the spectrum containuseful information. The infrared spectrum is a smallportion of the entire electromagnetic spectrum. IRradiation is a form of electromagnetic energy. IRwaves have certain characteristics similar to those oflight and RF waves. These characteristics includereflection, refraction, absorption, and speed oftransmission. IR waves differ from light, RF, andother electromagnetic waves only in wavelengths andfrequency of oscillation.The IR frequency range is from about 300gigahertz to 400 terahertz. Its place in theelectromagnetic spectrum (fig. 6-1 ) is between visibleFigure 6-1.-Electromagnetic spectrum.6-1
light and the microwave region used forhigh-definition radar. The IR region of theelectromagnetic spectrum lies between wavelengthsof 0.72 and 1,000 micrometers. Discussion of the IRregion is usually in terms of wavelength rather thanfrequency.NOTE: A basic knowledge of IR detectionprinciples is essential to understandingthermal imaging and the FLIR system asdiscussed in this chapter. If needed, youshould review IR detection principles in<strong>Aviation</strong> <strong>Electronics</strong> <strong>Technician</strong> 3,NAVEDTRA 12329, before reading thischapter.THERMAL IMAGINGLearning Objective: Recognize functions,characteristics, components, and operatingprinciples of thermal or infrared imaging.Infrared radiation is also known as thermal orheat radiation. Most materials emit, absorb, and/orreflect radiation in the IR region of theelectromagnetic spectrum. For example, an aircraftparked on a sunlit runway absorbs and radiatesvarying amounts of IR radiation. After the sun sets,the aircraft continues to radiate the absorbed heat,making detection at night possible. Even if theaircraft is moved, detection of the aircraft is possiblebecause the runway surface, which was directlybelow the aircraft, will be cooler than the surroundingrunway.Thermal imaging is referenced in terms oftemperature instead of reflectivity (radar) or color(visible light). Variations of the temperature in ascene tend to correspond to details that can be visuallydetected. The IR imaging system processes thisinformation and converts it into information that thesystem operator can use. Currently, the types ofimaging systems generally used are mechanicalscanning,fast-framing devices. They use the framerate (information update rate) that is similar totelevision. They are known as forward-lookinginfrared (FLIR) devices.Before a target can be detected, it must exchangeenergy with its environment, be self-heating, haveemissivity differences, and reflect other sources.Look at figure 6-2. Notice the atmosphere betweenFigure 6-2.-Thermal imaging.6-2
Table 6-1.-Characteristics of IR Radiationthe target and the FLIR attenuates and blurs the targetsignal. The FLIR operator aims the limited field ofview FLIR to search the scene for targets, using asearch pattern and clues, such as radar targets or laserdesignators.The FLIR system uses thermal sensitivity, imagesharpness, spectral response, contrast, and magnificationto produce a visual image of the thermal scene.The operator uses training, experience, and imageinterpretation skills to detect and identify targets.INFRARED RADIATIONThe atmosphere is a poor transmitter of infraredradiation because of the absorption properties of CO2(carbon dioxide), H2O (water), and 03 (ozone).Infrared radiation is broken into four regions, as canbe seen in table 6-1. Only the first three are used withthis system. Figure 6-3 shows the transmissionspectrum of the atmosphere. You can see that the besttransmission is between 3 µm and 5 pm, and between8 µm and 14 µm. The range between thesewavelengths is known as a window. Infrared imagingdevices are designed to operate in one of these twowindows, usually the 8 µm to 14 µm window.Infrared Radiation SourcesAll matter whose temperature is above -273°C(absolute zero) emits IR radiation. The amount of theradiation emitted is a function of heat. Theoretically,a perfect emitter is a black body with an emissivity of1. Realistically, the best emissivity is somewherearound 0.98. The emissivity of various objects ismeasured on a scale of 0 to 1.Figure 6-3.-Transmission spectrum of the atmosphere.6-3
The total energy emitted by an object at allwavelengths is directly dependent upon itstemperature. If the temperature of a body is increased10 times, the IR radiation emitted by the body isincreased 10,000 times. If the energy emitted by ablack body and its wavelengths is plotted on a graph,a hill-shaped curve results (fig. 6-4). By looking atthis graph, you can see that the energy emitted byshort wavelengths is low. As the wavelengths getlonger, the amount of energy increases up to a peakamount. After the peak is reached, the energy emittedby the body drops off sharply with a further increasein wavelength.Infrared OpticsMany of the materials commonly used in visiblelight optics are opaque at IR frequencies. For thisreason, they cannot be used in IR imaging systems.The optical material used in IR imaging systemsshould have a majority of the following qualities:. Be transparent at the wavelengths on which thesystem is operatingl Be opaque to other wavelengths. Have a zero coefficient of thermal expansion toprevent deformation and stress problems in opticalcomponents. Have high surface hardness to prevent scratchingthe optical surfaces. Have high mechanical strength to allow the useof thin lenses (high-ratio diameter to thickness)l Have low volubility with water to preventdamage to optical components by atmosphericmoisture. Be compatible with antireflection coatings toprevent separation of the coating from the opticalcomponentNone of the materials currently used for IR opticshave all of these qualities. However, silicon,germanium, zinc selenide, and zinc sulfide have manyof them.Infrared DetectorsThe detector is the most important component ofthe IR imaging system. There are many types ofdetectors, each having a distinct set of operatingcharacteristics. Bolometers, Golay cells, mercurydopedgermanium, lead sulfide, and phototubes arethe most commonly used types of detectors.Detectors can be characterized by their opticalconfiguration or by the energy-matter interactionprocess. There are two types of optical configurations—elementaland imaging.ELEMENTAL DETECTORS.— Elementaldetectors average the portion of the image of theoutside scene falling on the detector into a singlesignal. To detect the existence of a signal in the fieldof view, the detector builds up the picture bysequentially scanning the scene. The elementaldetector requires time to develop the image becausethe entire scene must be scanned.Figure 6-4.-Black body radiation.IMAGING DETECTORS.— Imaging detectorsyield the image directly. An imaging detector isconsidered a myriad of point detectors. Each of thedetectors responds to a discrete point on the image.Therefore, the imaging detector produces the entireimage instantaneously. A good example of animaging detector is photographic film.6-4
potential difference across a PN junction is caused bythe radiant signal. The photocurrent (currentgenerated by light) is added to the dark current(current that flows with no radiant input). The totalcurrent is proportional to the amount of light that fallson the detector.Figure 6-5.-Photoconductive detector circuit.Energy-Matter InteractionThere are two basic types of energy-matterinteraction. They are the thermal effect and thephoton effect.THERMAL EFFECT.— The thermal effect typeof energy-matter interaction involves the absorptionof radiant energy in the detector. This results in atemperature increase in the detector element. Theradiation is detected by monitoring the temperatureincrease in the detector. Both the elemental andimaging forms of detectors use the thermal effect.PHOTON EFFECT.— In the photon effect typeof energy-matter interaction, the photons of theradiant energy interact directly with the electrons inthe detector material. Usually, detectors using thephoton effect use semiconductor material. There arethree specific types of photon effect detection. Theyare photoconductivity, photoelectric, and photoemissive.1. Photoconductivity. Photoconductivity is themost widely used photon effect. (See figure 6-5.)Radiant energy changes the electrical conductivity ofthe detector material. An electrical circuit is used tomeasure the change in the conductivity.3. Photoemissive. The photoemissive effect(fig. 6-7) is also known as the external photo effect.The action of the radiation causes the emission of anelectron from the surface of the photocathode to thesurrounding space. The electron is photoexcited fromthe Fermi level above the potential barrier at thesurface of the metal.INFRARED IMAGING SYSTEMSAn infrared imaging system has the followingcomponents: detectors, a scene dissection system,front end optics, a refrigeration system, and an imageprocessing system.DetectorsDetectors convert the IR radiation signal into anelectrical signal that is processed into informationused by the operator. Detectors can be arranged inmany different configurations for their use in an IRimaging system.DETECTOR ARRAY.— Only a small portion ofthe image scene is taken by a detector (or detectors) to2. Photoelectric (also referred to as photovoltaic).In the photoelectric effect (fig. 6-6), aFigure 6-6.-Photoelectric effect.Figure 6-7.-Photoemessive effect.6-5
achieve maximum resolution. A large number ofdetector elements can be grouped together to form anarray (fig. 6-8, view A). The elements of this arrayare packed closely together in a regular pattern. Thus,the image of the scene is spread across the array like apicture or a mosaic. Each detector element views asmall portion of the total scene. The disadvantage ofthis type of system is that each detector elementrequires a supporting electronic circuit to process theinformation that it provides. Also, each detectorelement requires a preamplifier to boost the signal toa usable level.SINGLE DETECTOR.— Another method that isused to provide the operator with information is thesingle detector (fig. 6-8, view B). Here, there is onedetector requiring one set of supporting circuitry. Inthis type of system, the detector is scanned across theimage so that the detector can see the whole image.An optical system is required that can supply thescanning. This type of system is adequate if real-timeinformation is not needed, or if the object of interest isstationary or not moving quickly.Scene Dissection SystemThe scene dissection system is used to scan thescene image. There are many types of scanning-oneassociated with each type of detector array. When asingle detector with one axis of fast scan and one axisof slow scan is used, the scene is scanned rapidly inthe horizontal direction and slowly in the verticaldirection. As a result, the line is scanned horizontally;then the next line is scanned horizontally, etc.A vertical linear array is scanned rapidly in thehorizontal direction (fig. 6-8, view C). Onedetector element scans one line of the image. In thelinear array, there is a space, one element wide,between each element. The scan is one axis with aninterlace being used. A vertical linear array isscanned rapidly in the horizontal direction. Aftereach horizontal scan, the mechanism shifts theimage upward or downward one detector elementwidth so that on the next scan, the lines that weremissed are covered.Each system has an optimum configuration ofdetector array and image dissection. If the number ofelements in the detector increases, the systembecomes more complicated. Also, the cost of theFigure 6-8.-Detector arrays.6-6
system increases, and the reliability of the systemdecreases. If the number of detectors decreases, theamount of information that can be processed isreduced. A compromise between a large number ofelements (increased cost) and a smaller number ofelements (reduced information) is the linear array thatscans in one direction only. Each detector scans oneline of the scene image. The complexity of theelectronics is reduced, and the amount of informationthat is processed is increased. Thus, the size of thescene to be viewed and the detail of the scene isincreased.There are many types of mechanisms that can beused to scan the scene. When you scan with two axes,the two scanning motions must be synchronized. Theelectronic signal that controls the sampling of thedetectors must also be synchronized with the scanningmotions.Front End OpticsThe front end optics collect the incoming radiantenergy and focus the image at the detectors. Theoptics may be reflective or refractive, or acombination of both. Many systems offer a zoomcapability, allowing a continuous change inmagnification of the image without changing thefocus. Spectral filters are used to restrict thewavelength of light entering the system. Thisprevents unwanted wavelengths of light fromreaching the detector and interfering with the imagingprocess.Refrigeration SystemA refrigeration system is needed in imagingsystems because many types of infrared detectorsrequire low temperatures if they are to operateproperly. The two types of detector cooling that areused are the open-cycle and the closed-cycle types.In the open-cycle type of cooling, a reservoir ofliquified cryogenic gas is provided. The liquid isforced to travel to the detector, where it is allowed torevert to a gas. As it changes from a liquid to a gas, itabsorbs a great deal of heat from the surrounding areaand the detector.In the closed-cycle type of cooling, the gas iscompressed, and the heat generated by thecompression is radiated away by the use of a heatexchanger. The gas is then returned to the compressorand the cycle repeats itself.Image Processing SystemsThe image processing system is used to convertthe data collected by the detectors into a videodisplay. Data from the detectors is multiplexed sothat it can be handled by one set of electronics. Thenit is processed so that the information coming fromthe detectors is in the correct order of serialtransference to the video display. At this point, anyother information that is to be displayed is added.In other image processing systems, the signalsfrom the detectors are amplified and sent to an LEDdisplay, or they are optically amplified byphotomultiplier tubes and projected on aphosphorescent screen.FORWARD-LOOKING INFRAREDSYSTEMLearning Objective: Recognize componentsand operating principles of a typical FLIRsystem.A forward-looking infrared system is an infrareddetecting set (IRDS). The IRDS is a passive devicethat operates on the IR principles of emissivity. Theterms FLIR and IRDS are synonymous so far assystem operation is concerned. Only the azimuthcoverage differs. The FLIR system scans anoperator-selected portion of the terrain along theaircraft’s flight path and displays a televised image ofthe IR patterns of the terrain. The primary function ofthe FLIR system is to give the operator an improvedcapability to detect, identify, and classify targets ofinterest that would otherwise be concealed from eithervisual observation or radar detection. The visualconcealment could be due to darkness or camouflage.The radar concealment could be due to extreme scopeclutter caused by inclement weather, rough seas, orelectronic jamming. Additionally, the FLIR systememits no transmission for detection by an enemy.Although there are various types of FLIR systems6-7
Figure 6-9.-FLIR system block diagram.Figure 6-10.-Station-mounted FLIR pod.6-8
used in the Navy, their principles of operation arebasically the same.A typical FLIR system contains several weaponsreplaceable assemblies (WRAs). These WRAs are asfollows: receiver-converter, power supply-videoconverter, control servomechanism, target trackingsight control, infrared detecting set control, and videoindicator. Figure 6-9 shows the block diagram of atypical FLIR system. You should refer to the blockdiagram as you read about the FLIR systemcomponents.RECEIVER-CONVERTER ASSEMBLYThe receiver-converter assembly contains all ofthe optics and electronics used to detect and convertIR energy into a single-channel video output to beprocessed by the power supply-video converterassembly. The processed video output is applied tothe video indicator. The receiver-converter assemblycontains gyros, gimbals, and drive motors to aim andstabilize the receiver section in azimuth and elevation.It also contains a heat exchanger to circulateconditioned air throughout the assembly and arefrigerator unit to keep the IR detectors cooled tocryogenic temperatures. The receiver-converterassembly is housed in either the forward section of astation-mounted FLIR pod (fig. 6-10) or in its ownpod, mounted on the forward lower part of theaircraft’s fuselage (fig. 6-11). The housing used isdependent on the aircraft model.Functionally, the receiver-converter breaks downinto four subsystems as follows:IR to composite video conversionTemperature controlPositioning and stabilizationBITE (built-in test equipment)Figure 6-11.-Receiver-converter pod shown in operating position.232.1816-9
IR to Composite Video ConversionFigure 6-12 is a diagram showing the optics andelectronic components of a typical receiver-converterrequired to perform IR detection and conversion intoa useable video signal. Although the signal opticalpath and conversion coincide, each path is discussedseparately for simplicity. You should refer tofigure 6-12 as you read the following paragraphs.SIGNAL OPTICAL PATH.— Incoming IRenergy from a target enters the receiver through awindow and strikes one side of a double-sided scanmirror. This mirror is controlled by a seamer module.The IR signal either strikes the mirror directly or isfocused onto the mirror by optical lenses contained inwhat is called an afocal optics unit. The operation ofthe afocal unit is governed by a field of view (FOV)switch on the operator’s infrared detecting set control(IRDSC). In the wide FOV mode of operation, theafocal optic lenses are not in the signal optical path.In the narrow FOV mode of operation, the lenses arein the path shown in figure 6-12. The lenses arefocused by a motor that is controlled by a focusingmodule in the receiver-converter assembly. Thefocusing module has two inputs to control theoperation of the focusing motor. One input is a targetrange scale set by the operator on the IRDSC. Theother input is a feedback signal from a temperaturesensingcircuit in the afocal optics unit. Because theindex of refraction of an optical lens changes withchanges in temperature, the focusing modulemonitors the temperature of the lens and maintainsproper focusing of the IR signal onto the scan mirror.The scan mirror is controlled by a scannermodule. It is also positioned in line-of-sight (LOS)position, along with the entire receiving head, byFigure 6-12.-FLIR optical path and IR processing.6-10
signals from the control servomechanism. As shownat the top of figure 6-12, one side scans the incomingIR energy and reflects the signals into the IR imagingoptics, while the bottom side simultaneously scansvisible light signals from the collimating lens andreflects the signal into the TV camera optics. Themirror scans the horizontal axis, and is indexed in thevertical axis to provide a 2:1 ratio interlace scan. Themirror scan is synchronized to the TV camera by syncsignals.IR TO VIDEO PROCESSING.— The IR signalsreflected from the scan mirror into the imaging opticsare focused onto an IR detector array located behindan imaging lens. The lens is kept in focus much thesame as the afocal lenses. The IR detector arrayconsists of approximately 180 individual detectorsarranged in a linear array with a space between eachto allow for 2:1 interlacing. The scan mirror scans theimage across the detectors, and each detectorproduces a single horizontal line of IR video. Thescan mirror is indexed one line width in the verticaldirection, making a total of 360 lines of video withonly 180 detectors and amplifier channels. Becauseof the 2:1 interlacing, two full scans of the mirror arerequired to reproduce the entire image. Each detectorconducts according to the amount of IR energyimpressed on it from the scan mirror. The resultantoutput of the IR detector array is 180 parallel signalsrepresenting 360 video lines of IR energy scanned bythe scan mirror.The resultant output of the LED array comprises 180parallel visible light beams (signals) representative ofthe IR energy scanned by the scan mirror. In otherwords, the resultant output of the LED arrayrepresents the terrain or targets scanned.The output of the LED array is applied to thecollimating lens unit. This unit focuses the visiblelight while maintaining the light beams parallel toeach other rather than converging them to a focalpoint, as shown in figure 6-13, views A and B.The output of the collimating lens unit is scannedby the back side of the scan mirror and is reflectedinto the camera optics unit that focuses the light forthe TV vidicon camera. Also, a reticle light signalfrom the reticle optics unit is applied simultaneouslyto the TV camera to give an indication of the positionof the receiving head. The TV vidicon cameraprocesses the visible light signals into a singlechannel video signal. The video output of the camerais fed to the power supply-video converter assemblyfor further processing.The IR detectors are kept at cryogenictemperatures by the refrigerator unit. The detectorsare biased to process the incoming IR energy into auseable multichannel IR video signal. The low-leveloutput of the detector array is fed to a video amplifiermodule. The module consists of one preamplifier andthree postamplifiers for each of the IR detectors in thearray. This is required to increase the IR signal to auseable level. The output of the postamplifiers iscontrolled by a dc level (+ or –) whose polarity iscontrolled by a polarity switch on the IRDSC. Thepurpose of the dc polarity is to have “hot” targetsappear either white or black on the video indicator.Also, the outputs of the video amplifiers are gated onor off in synchronization with the scan mirror and theTV camera sweep.Each video amplifier feeds a light-emitting diode(LED) of the LED array. The LED array duplicatesthe IR detector array. The visible light intensityoutput of one LED is proportional to the IR output ofthe corresponding IR detector in the detector array.Figure 6-13.-Lens focusing patterns.6-11
Temperature ControlFigure 6-14 is a block diagram of a receiverconverterheat exchanger. The heat exchangersupplies conditioned air to the receiver-converterassembly for environmental control. The exchangershown consists of two blowers, six heaters, threetemperature-sensitive switches, and an air-to-air heatexchanger. Three of the heaters are connected in awye conflguration, and the other three are connectedin a delta configuration. The three temperaturesensitiveswitches are usually mounted on the receivercasting. Blowers B1 and B2 circulate cooling air andheating air within the receiver-converter. Internalblower B1 operates whenever the FLIR system isturned on. If the temperature of the assemblycompartment goes above approximately 77°F (25°C),thermal switch RT3 operates relay K3, applyingpower to external blower B2. Blower B2 draws coolexternal air through the air-to-air heat exchanger.Internal blower B1 circulates the cool air and coolsthe compartment. If the temperature in thecompartment goes below 68°F (20°C), thermal switchRT2 operates relay K1, applying power to thewye-configured heaters. The heaters operate atapproximately 365 watts. If the compartmenttemperature drops below 50°F (10°C), thermal switchRT1 operates K2, applying power to thedelta-cordigured heaters. This increases the wattageused by the heaters to approximately 1,200 watts.Thus, the heat exchanger is able to maintain thereceiver-converter compartment at a temperaturebetween 68°F and 77°F at all times.Positioning and StabilizationThe function of the stabilized gimbal subsystemof the receiver-converter is to allow the operator toselect the line-of-sight (LOS) desired to the receiverunit. Another function is to maintain a steady imageof the IR patterns of the areas viewed regardless ofaircraft movement. This critical stability is obtainedby means of gyros mounted on the receiver assembly.There is one azimuth and one elevation gyro.Figure 6-15 is a simplified block diagram of a typicalFLIR positioning and stabilization subsystem.Figure 6-14.-Receiver-converter heat exchanger block diagram.6-12
Figure 6-15.-FLIR positioning/stabilization block diagram.The LOS of the receiver is selected in one of threeways:. By a program in the aircraft’s computer (or avideo tracking computer when the system is used witha laser system). By inputs from the target tracking sight control. By operator adjustment of the azimuth andelevation controls on the control boxThe control servomechanism WRA processesthese azimuth and elevation commands, no matterfrom which source they come. This WRA will thenapply drive signals to the receiver head positioningmotors and gimbals. The receiving head is alignedto the desired LOS. If the aircraft should pitch orroll, the gyros (mounted on the receiver head)initiate error signals to a capture loop. This loopcreates azimuth and elevation rate signals. The ratesignals are fed back to the control servomechanism(CS). The CS will then process these rate signalsand apply them to the receiver head as drive signalsto maintain the correct LOS. In the manual mode(which uses the target tracking sight control), thestabilization system is inhibited in the controlservomechanism assembly.BITE SystemMost FLIR systems are equipped with a built-intest equipment (BITE) system. The receiverconverterBITE subsystem monitors status signalsfrom the following subassemblies:Camera videoRefrigerator unitGimbals from the control servomechanismassemblyScan mirror and TV camera scanFocus drive of the lensesHeat exchanger6-13
—. Afocal optics assemblyPower Supply. IR detectorsFigure 6-16 is a simplified block diagram of areceiver-converter BITE system. The BITE signalsgo to a BITE logic module in the power supply-videoconverter WRA. In this WRA, they are combined andsent to the IRDSC to light the various indicators.POWER SUPPLY-VIDEO CONVERTERASSEMBLYFunctionally, the power supply-video converterassembly breaks down into three subsystems. Thesesubsystems are the power supply, the videoprocessing, and the BITE system.The power supply subsystem is a typical powersupply. It filters aircraft power for use by thereceiver-converter assembly. It also develops all theoperating voltages for both the receiver-converter andthe power supply-video converter circuits.Video ProcessingThe video processing subsystem generates thesynchronizing drive and timing signals for thereceiver-converter. It also converts the TV cameravideo from the receiver-converter assembly into acomposite video format. This format consists ofcamera video and receiver position information forpresentation on the video indicator.Figure 6-16.-Receiver-converter BITE block diagram.6-14
Figure 6-17.-Video converter video processing block diagram.Figure 6-17 is a simplified block diagram of thevideo processing sections found in a typical FLIRpower supply-video converter WRA. The gimbalangle indicator unit receives linear signals from thecontrol servomechanism azimuth and elevationgimbal potentiometers. These potentiometersreceive inputs from the gimbals in thereceiver-converter. The potentiometers thengenerate synthetic video signals. The signalspresent short, bright-line segments along thecalibrated scales on the video indicator to showreceiver head position. An example of this is shownin figure 6-18.The sync generator module contains acrystal-controlled clock. The module generates alltiming (sync), clamping, and drive signals for thereceiver-converter and the TV camera. It alsogenerates all timing, gating, clamping, and blankingsignals for the video processor and gimbal angleFigure 6-18.-Azimuth/elevation scale on a video indicator.6-15
Table 6-2-Sync Generator OutputsSYNC GEN OUTPUTBeam gate onlyCathode driveDark current driveHorizontal current driveVertical deflection driveComposite clampingScanner syncHorizontal syncComposite blankingVertical blankingComposite syncGray scale signalHorizontal clampingUNIT SUPPLIEDTV cameraTV cameraTV cameraTV cameraTV cameraTV cameraScanning optic unitGimbal angle indicator (GAI)GAI, video processorGimbal angle indicatorVideo processorVideo processorVideo processorindicator (GAI) modules. These signals are listedin table 6-2.The sync generator module also generates agray scale signal upon receipt of a gray scalecommand signal from the IRDSC. The IRDSCgenerates this command whenever the gray scaleswitch is turned on. The gray scale signal presentsa gray scale pattern (fig. 6-19) on the videoindicator. The pattern serves to aid the operator inadjusting the level and gain controls on theIRDSC. There is a total of ten different shades.Each shade represents a different IR temperaturerange to which the operator can compare thetarget intensity and estimate the temperature ofthe target. The temperature is an indication of thetype of target material.The video processor receives rawvideo signals from the TV camera. Italso receives gimbal angle Indicatorsynthetic video, gray scale signals, compositesync, composite blanking, and horizontal6-16Figure 6-19.-Gray scale video indicator presentation.
clamping signals from the sync generator. The videoprocessor combines all of these signals into acomposite video signal, which is fed to the video linedrivers. The video line drivers amplify the compositevideo and provide three separate outputs. One outputgoes to the video indicator, one goes to the aircraftcomputer, and one goes to the video BITE module.BITE SubsystemFigure 6-20 shows a simplified block diagram ofthe BITE subsystem of the power supply-videoconverter. The BITE logic module receives aninitiation command signal from the IRDSC. Thiscommand is generated whenever BITE is selected onthe IRDSC. The signal causes the BITE logic moduleto generate and send a gray scale enable signal to thesync generator. This signal overrides the gray scaleswitch on the IRDSC, and causes the sync generatorto output a gray scale signal in addition to the sync,blanking, clamping, and drive signals. BITE logicalso sends a BITE initiate signal to the controlservomechanism to initiate servo BITE. A BITE ONsignal is sent to the IRDSC from the BITE logicmodule to light the BITE ON indicator. This indicatorshows that the BITE mode is operating.The TV video BITE module monitors the outputof the sync generator, the video line drivers, and thecamera BITE from the receiver-converter. If a failureoccurs in any of these circuits, the video BITE modulegenerates and sends a TV fail signal to the powersupply BITE module.The power supply BITE module monitors all ofthe power supply voltages. If any voltage is notcorrect, a power supply malfunction signal isgenerated and sent to the BITE logic module. Thissignal causes the logic module to send a power supplyfail signal to the IRDSC to light the power supply faillight. If the power supply receives a TV fail signalFigure 6-20.-Power supply-video converter BITE block diagram.6-17
from the video BITE, it will send a power supplymalfunction signal to the IRDSC to light the powersupply fail light.BITE logic also monitors incoming signals fromthe receiver-converter and control servomechanism.The logic module will initiate signals to the IRDSC tooperate the various indicator lights based on thesesignals.CONTROL SERVOMECHANISMASSEMBLYThe control servomechanism assembly processesline-of-sight (LOS) position and rate commands fromthe IRDSC, the target tracking sight control (TTSC),or the aircraft computer. The source of thesecommands depends upon which operational mode thesystem is operating in. These commands areprocessed as analog drive signals for slewing(steering) the receiver-converter drive motors andgimbals to position the receiver head. Functionally,the control servomechanism assembly breaks downinto four subsystems. These are the power supply,azimuth drive, elevation drive, and the BITEsubsystems.The azimuth and elevation drive signals areprocessed simultaneously in a given module. Forsimplicity, we will discuss each subsystem separately.Notice the modules are labeled in their respectiveblock diagrams as azimuth (fig. 6-21) or elevation(fig. 6-22) as appropriate. Keep in mind that, inactual practice, a module (such as mode logic) isFigure 6-21.-Azimuth drive subsystem block diagram.6-18
shared by both azimuth and elevation drive signals.The following discussion will refer to that module asthe azimuth mode logic module or the elevation modelogic module, as appropriate.Power SupplyThe power supply is a typical power supply. Itfilters aircraft power and develops all of the operatingvoltages for the control servomechanism assemblyand the TTSC assembly circuits.Azimuth Drive SubsystemFigure 6-21 is a simplified block diagram of atypical azimuth drive subsystem used in a controlservomechanism assembly. The azimuth mode logicmodule receives one of four operational commandsfrom the IRDSC. These mode commands are foreither the position, the forward (FWD), the manualtrack, or the computer track modes. The operatorselects the mode on the IRDSC.POSITION MODE.— The position modecommand signal is processed by the mode logicmodule, which sends a position (POS) commandsignal to the azimuth position compensation module.This module processes the signal, enabling it toreceive azimuth position (LOS) information from theIRDSC azimuth control. It outputs position loopcommand and gimbal angle signals to the azimuthrate compensation module. The azimuth ratecompensation module sends an azimuth drive signalto the azimuth heat sink module. This moduleFigure 6-22.-Elevation drive subsystem block diagram.6-19
amplifies the signal to develop enough motor drivepower to steer the receiver head to the azimuthbearing selected on the IRDSC by the operator.Four feedback signals are involved in ensuringthe receiver head maintains the correct LOS. Anazimuth tachometer signal from the receiverconverterazimuth drive unit is fed back to the modelogic module. The mode logic module produces agimbal rate signal for the azimuth rate compensationmodule. An azimuth position signal from the sameazimuth drive unit is fed back to the azimuth positioncompensation module. The mode logic modulecompares the azimuth position signals with theIRDSC azimuth input and, as applicable, outputs aposition error signal to the azimuth rate compensationmodule. An azimuth gyro rate signal from thereceiver-converter’s gyro unit is fed to the azimuthrate compensation module. Also, an azimuth currentdrive signal is fed back to the rate compensationmodule. The rate compensation module processes allof the feedback signals (position error, gimbal rate,gyro rate, and current drive signals) and develops anoutput signal. This output signal, if necessary,maintains the receiver head at the correct selectedheading.FORWARD MODE (FWD).— The FWD modecommand is processed by the azimuth mode logicmodule. This module outputs a FWD mode commandsignal to the azimuth position compensation module.This module will process the command signal. It thenoutputs a position loop command and a gimbal anglesignal to the azimuth rate compensation module. Thismodule then sends an azimuth drive signal to steer thereceiver head to 0° azimuth. The azimuth drive signalis amplified by the azimuth heat sink module toproduce the motor power to drive the motors in thereceiver-converter. The stabilization/positioningfeedback circuits work the same as the circuits in theposition mode previously explained.MANUAL TRACK MODE.— The manual trackmode command signal is processed by the mode logiccircuit. This circuit sends a manual track commandsignal and an azimuth rate inhibit signal to theazimuth rate compensation module. These signalscause the circuits to accept only azimuth rate signalsfrom the target tracking sight control assembly. TheTTSC assembly is a pistol grip unit. The operatoruses the thumb control on the pistol grip unit to aimthe receiver head to the desired LOS. The azimuthdrive output signal from the circuit is controlled bythe TTSC, and no feedback is used for stabilization.Action of a comparator circuit in the azimuth ratecompensation module determines when thereceiver-converter gimbals reach their electricallimits and produce limit signals (CW and CCW).These limit signals prevent the manual track modeand computer track mode commands from developingthe azimuth drive signal. The limit signals are fedback to the mode logic module that outputs a CW orCCW signal to the azimuth position compensationmodule. This signal causes the module to develop anerror signal that, in turn, develops appropriateazimuth drive.COMPUTER TRACK MODE.— The aircraftcomputer supplies gimbal control data bits (azimuthand elevation position rate commands) from itsprogram to the decoder storage module. This moduledemultiplexes and stores 12-bit azimuth and elevationrate commands. It also provides azimuth andelevation data outputs to the digital-to-analog (D/A)converter module. The purpose of storage is to allowthe decoder to output data bits to the D/A converter,while the computer updates itself from feedbackinformation before issuing new gimbal control signalsto keep the receiver head at the programmed LOS.When the computer track mode is selected on theIRDSC, the computer track command is processed bythe mode logic module. This module will send acomputer track mode command to the D/A converterand to the azimuth rate compensation module. Thesignal enables the D/A converter to process azimuthdata bits into analog azimuth position rate signals,which are fed to the azimuth rate compensationmodule. The D/A converter also sends a computertrack mode status signal to inform the aircraftcomputer that the D/A converter is operating in thecomputer mode. The computer track command signalenables the azimuth rate compensation module toaccept azimuth position rate signals from the D/Aconverter only. The azimuth rate compensationmodule disables inputs from the azimuth positioncompensation module. This means no feedbackinformation can be processed in the computer mode.The rate compensation circuit processes the azimuthposition rate signal from the D/A converter andoutputs an azimuth drive signal. This signal goesthrough the azimuth heat sink circuit to slew thereceiver head to the azimuth position programmedinto the computer.An azimuth resolver in the receiver-converterfeeds back four-wire resolver position informationsignals to the azimuth rate compensation module6-20
where they are converted into three-wire syncroinformation signals. These signals are fed back to theaircraft computer logic circuits to update thecomputer and develop gimbal control data bits tomaintain the receiver head at the correct LOS.If the system is operating in the position mode,FWD mode, or computer track mode, and the operatorwants to quickly shift to the manual track mode, theoperator is able to do so by use of a manual overridefunction on the TTSC. When manual override isinitiated, a manual override command signal from theTTSC is processed by the azimuth mode logicmodule. This module sends a manual override signalto the D/A converter. It also sends out manual trackcommand signals, as explained previously for manualtrack mode. The FLIR system functions in themanual track mode regardless of the position of thecontrol box mode select switch.The manual track override signal disables the D/Aconverter. It also sends a manual track mode status tothe aircraft computer logic to prevent the computerfrom operating should the control box have computertrack selected.Elevation Drive SubsystemFigure 6-22 is the simplified block diagram of anelevation drive subsystem. Compare figures 6-21 and6-22. Notice they are the same except for theelevation and azimuth labels on the modules. Thesubsystems are the same because the servomechanismelevation drive circuits operate the same and processthe same signals and develop the same drive signal asthe azimuth drive subsystem. The only difference isthat no tachometer feedback is used in the elevationcircuits, and all signals come from or go to elevationcircuits vice azimuth circuits.In the FWD mode of operation, the elevationcircuits slew the receiver head to –4° (down tilt)elevation. The azimuth circuits slew the receive headto 0° azimuth. All other modes operate the sameexcept the receiver head is slewed in elevation insteadof in azimuth.CS BITE SubsystemThe control servomechanism BITE subsystemautomatically determines whether a servo-systemfailure is in the CS WRA or in the receiver-converterWRA. Figure 6-23 is a simplified block diagram ofthe CS BITE subsystem. For ease of signal tracing,some of the modules have been duplicated at variouslocations on the diagram. These modules, such as themode logic, have alphanumeric designators (A1, A2,A3, etc.). However, the modules are all part of onelogic module. The alphanumeric numbers are used toshow where signals enter/leave a particular module.A temperature sensor in the receiver-convertermonitors the gyro operating temperature. When thegyros are operating properly, the sensor develops atemp ready signal, regardless of which operationalmode is selected on the control box. The temp readysignal is fed to the mode logic module (A1) of the CS.The mode logic circuit outputs a rcvr ready signal tothe servo BITE module (B1). The rcvr ready signalenables servo BITE (B1). When BITE is initiated onthe control box, a BITE initiate signal is received bythe servo BITE (B1) module from the power supplyvideoconverter BITE logic module. The BITEinitiate signal initiates a series of four test sequencedas follows: fault isolate, BITE 1, BITE 2, and BITE3. All tests are controlled by a 10-HZ clock in theservo BITE module. Each test sequence takes 10 to12 seconds to complete.FAULT ISOLATE TEST.— Initially (when rcvrready and BITE initiate are received), the servo BITEmodule (B1) generates a BITE fault isolate signal anda digital computer interface (DCI) fault isolate signal.The BITE fault isolate signal goes to the followingmodules: azimuth position compensation (C1),elevation position compensation (D1), mode logic(A3), azimuth rate compensation (E1), and elevationrate compensation (F1 ). The signal enables all ofthese modules and causes the azimuth positioncompensation module (C2) and elevation positioncompensation module (D2) to generate BITE motordrive signals.The DCI fault isolate signal goes to the decoderstorage module (for use in the BITE 3 test) and tomode logic (A2). The DCI signal causes mode logicto open the BITE relay drive line, de-energizing theBITE relay (shown in the de-energized position).Opening the relay removes azimuth and elevationmotor drive from the motors in the receiver-converter.Instead, the azimuth and elevation heat sink motordrive output is routed to the azimuth positioncompensation module (C1) and the elevation positioncompensation module (D1). The BITE motor drivesignals generated by the azimuth positioncompensation (C2) and elevation positioncompensation (D2) are routed by way of AZ POSNand EL POSN lines to the azimuth rate compensation(E1) and elevation rate compensation (F1),respectively. The drive signals out of these modules6-21
Figure 6-23.6-22
go to the azimuth/elevation heat sink module. Fromthis module, the signals go through the BITE relayand back into azimuth position compensation module(C1) and elevation position compensation module(D1). Modules C1 and D1 output azimuth andelevation BITE position signals to servo BITE (B2).The servo BITE module (B2) outputs a servo controlfail signal to the power supply-video converter BITElogic circuit, which is labeled a servo malfunction infigure 6-20. This logic circuit, in turn, outputs a notready signal to light the NOT READY light on thecontrol box.With the BITE relay de-energized (as shown), anazimuth loop is formed. This loop consists of theazimuth position compensation (C2), azimuth ratecompensation (E1 ), a heat sink module and BITErelay, azimuth rate compensation (E2), and azimuthposition compensation (C1). Likewise, an elevationloop is formed. This elevation loop consists ofelevation position compensation (D2), elevation ratecompensation (F1), a heat sink module and BITErelay, elevation rate compensation (F2), and elevationposition compensation (D1). This allows the BITEmotor drive signals (developed in C2 and D2) tocontinue around the loop. The BITE motor drivesignals are monitored by frequency and amplitudedetectors in servo BITE (B2). The inputs to thesedetectors are the azimuth and elevation BITE positionsignals from C1 and D1, which represent the signalsin the loops. If an error or failure occurs, servo BITE(B2) generates a servo control fail signal. This signalis sent to the power supply-video converter BITElogic, labeled servo malfunction in figure 6-20. Fromhere a control servo fail signal is sent to the controlbox to light the CONTROL SERVO FAIL light.If no errors or failures are present during the faultisolation test, which takes approximately 10 to 12seconds, a BITE 1 signal is generated by servo BITE(B1). This signal terminates the fault isolation testand initiates the BITE 1 test.BITE 1 TEST.— When servo BITE (B1)generates a BITE 1 signal, the signal is fed to modelogic (A2). This causes module A2 to energize theBITE relay (via the BITE relay drive line),reconnecting the heat sink module output to the drivemotors in the receiver-converter WRA. This alsoopens up the azimuth and elevation loops. Modelogic (A2) also generates a FWD command signal.This signal is fed to the azimuth positioncompensation module (C2) and elevation positioncompensation module (D2). These two modulesgenerate BITE motor drive signals. These signals arefed through the azimuth and elevation ratecompensation modules (E1 and F1) to the heat sinkmodule and the now energized BITE relay. Thispositions the receiver head in the receiver-converterto 0° azimuth and -4° elevation. Position feedbacksignals from the receiver-converter are fed to theservo BITE (B2) module where they are monitored.If there is an error/failure, a gimbal fail signal isgenerated and fed to the servo BITE board in thereceiver-converter. This action causes the receiverBITE circuit to generate and send a receiver-convertermalfunction signal to the control box to light theRCVR CONV FAIL light.If the feedback signals to B2 are correct (for 10 to12 seconds), a BITE 2 signal is generated by servoBITE (B1). The BITE 2 signal terminates the BITE 1test and initiates the BITE 2 test.BITE 2 TEST.— When servo BITE (B2)generates a BITE 2 signal, the signal is fed to themode logic module (A2) to cancel the FWD commandsignal. The BITE 2 signal is also fed to the azimuthposition compensation module (C2) and the elevationposition compensation module (D2). The BITE 2signal causes these modules to develop and send errormotor drive signals to the receiver head by way of thesame signal path as the BITE 1 signal. These signalsdrive the receiver head to 130° azimuth and -60°elevation. Feedback signals are monitored by servoBITE (B2). If an error is present, B2 generates agimbal fail signal to light the RCVR CONV FAILlight on the control box. This fail signal uses the samepath as in BITE 1 testing. If the feedback signals arecorrect, servo BITE (B1) generates a BITE 3 signal.This signal terminates BITE 2 testing and initiates theBITE 3 test.BITE 3 TEST.— When servo BITE (B1)generates a BITE 3 signal, the module B1 alsogenerates a BITE 3 DCI signal (simulated computerdata bit). This signal is sent to the decoder storagemodule. Simultaneously, a BITE 3 signal is sent tomode logic (A2). This module initiates a computertrack command signal and sends it to the azimuthposition compensation module (C2), the elevationposition compensation module (D2), and the D/Aconverter module. The computer track commandsignal enables these modules for the computer trackmode.The BITE 3 DCI signals from the decoder storagemodule are processed by the D/A converter. The D/Aconverter outputs azimuth and elevation rate signals.A circuit in the D/A converter monitors the amplitudeand frequency of these rate signals. If the amplitudeand frequency are incorrect, the D/A convertergenerates a DCI fail (either azimuth or elevation)signal to the servo BITE (B2). This module outputs aservo control fail signal, which, in turn, lights the6-23
CONTROL SERVO FAIL light on the control box. Ifthe signals are correct, they are fed to the azimuth andelevation rate compensation modules (E1 and F1) todevelop motor drive signals to slew the receiver headgimbals maximum CW and up. The rate feedbacksignals (gyro rate to E2 and F2 and azimuthtachometer to mode logic A2 and A3) are fed to servoBITE (B2). These signals are compared to the signals(azimuth/elevation rate) from the D/A converter.Should an error exist, a DCI fault isolate signal isgenerated by servo BITE (B2) and fed to mode logic(A2). Mode logic (A2) sends a known tachometersignal to the tachometer demodulator. If thedemodulator is bad, a DEMOD fail signal is generatedand sent to B2 that causes a control servo fail output.If the demodulator is good, but a rate error still exist,B2 outputs a gimbal fail signal that signifies thereceiver-converter is bad. If the rate comparisonshows no error, a BITE complete signal is generatedby servo BITE (B2) and sent to the power supplyvideoconverter. If no error has occurred duringBITE, the BITE logic module initiates a system gosignal. This signal is sent to the control box to lightthe SYS GO light.Figure 6-24.-Target tracking sight control.Figure 6-25.-TTSC block diagram.6-24
TARGET TRACKING SIGHT CONTROLAs mentioned earlier in this chapter, TTSC is themanual control used in the manual mode of operationto position the receiver-converter to the desired LOS.Figure 6-24 is a drawing of the TTSC. The TTSCconsists of a stationary control stick (A) and theelectronics for producing azimuth and elevation dcrate command signals. A thumb control (B) is used inconjunction with an angle transducer to steer thereceiver head. A trigger-type switch (C) is used toprovide manual override.Figure 6-25 is a simplified block diagram of aTTSC. A voltage regulator regulates the 15-volt dcinput from the control servomechanism WRA andprovides +6 volts dc and –6 volts dc to an angletransducer. Adjustment of the thumb control producevoltage outputs from the elevation and azimuth angletransducers. These outputs are amplified and sent tothe control servomechanism. Here they are processedto position the receiver head to the desired LOS.Should you select the computer tracking mode,the FWD mode, or the position mode on the controlbox, depressing the trigger switch initiates a manualoverride command signal. This signal goes to themode logic and D/A converter modules. This placesthe system in the manual track mode of operation.INFRARED DETECTING SET CONTROL(IRDSC)Figure 6-26 is a drawing of an IRDSC/FLIRcontrol box. Notice that each control has beenFigure 6-26.-IRDSC/FLIR control box.6-25
numbered. Refer to these numbers while you read thefollowing section.1. The GRAY SCALE switch energizes thecircuit in the power supply-video converter WRA,which presents ten shades of gray across the bottomof the video indicator.2. The MODE switch is a 6-position rotaryswitch that selects the mode of operation. In theSTBY position, the system is maintained in theoperational readiness state. The air conditioning andcryogenic cooling of detectors is activated. Thereceiver head is in the stow position (CCW and uplimits).3. The AZIMUTH knob controls the receiverslew signals (azimuth) in the position mode ofoperation.4. The SYS GO push button illuminates toindicate a good system at the completion of BITE.The light can be extinguished by pressing theindicator.5. The BIT ON push button initiates the BITEtest sequence. The push button is lit while BITE is inprogress. The light goes out upon completion ofBITE.6. The POWER SUPPLY FAIL indicatorilluminates if the power supply-video converter failsBITE.7. The POL switch is a two-position switch thatselects the polarity of video signals from thepostamplifiers of the receiver-converter detector arrayvideo amplifier circuits. In the WHT HOT position,the hot targets appear white on the video indicator. Inthe BLK HOT position, the hot targets appear blackon the indicator.8. The FOV switch selects either wide (WIDE)or narrow (NAR) field of view. It does this byswitching an afocal lens assembly in or out of theoptical path of the receiver.9. The GAIN knob adjusts the dc level of thevideo output to the video indicator. This affects thecontrast of targets on the indicator.10. The LEVEL knob adjusts the dc level of thevideo output of the receiver-converter. This affectsthe brightness of the background on the videoindicator.11. The RCVR CONV FAIL indicatorilluminates if the receiver-converter fails BITE test.12. The FOCUS switch is a four position rotaryswitch that selects target range for focusing the afocallenses in the narrow FOV.13. The RTCL BRT knob controls the brightnessof the reticle that is superimposed on the video signalapplied to the video indicator.14. The NOT READY indicator illuminateswhen the receiver-converter is not at operatingtemperature, when gyro spin-up is not complete, orwhen BITE is in the fault isolation mode.15. The COOLING indicator illuminates toindicate the IR detectors in the receiver-converterhave not reached operating temperature.16. The RCVR O TEMP indicator showsexcessive temperature within the receiver-converter.17. The SERVO FAIL indicator illuminates if thecontrol servomechanism fails the BITE test.18. The ELEVATION knob controls the receiverslew signals (elevation) in the position mode ofoperation.VIDEO INDICATORThe typical video indicator (fig. 6-18) is an875-line, 30 frames-per-second, closed-circuit TVmonitor. On the front of the WRA is an ON-OFFpower switch, an elapsed time meter, brightness andcontrast controls, and a status indicator. Operation ofthe indicator is similar to that of a TV monitor.Figure 6-27 is a simplified block diagram of a videoindicator’s signal processing circuits.Composite video from the video line drivermodule of the power supply-video converter isapplied to the video amplifier/sync stripper module.This module separates the video signals (IR,RETICLE, GAI, and gray scale) from the sync signals(blanking, clamping, and sync). The moduleamplifies the video signals and provides the videooutput to the CRT for display. The contrast control isalso injected in the video amplifier/sync strippermodule. The module also sends the composite syncsignals to the vertical, sync, CRT protect, andbrightness control module.The video amplifier/sync stripper moduleprocesses the composite sync signal. It providesvertical and horizontal sync signals to the vertical andhorizontal sweep module. It also provides blankingand clamping signals to the CRT. The brightness6-26
control is injected in this module. The module alsomonitors the vertical sweep and horizontal flybacksignals, removes the 300-volt dc operating voltagefrom the CRT, and extinguishes the STATUS lightwhen a failure occurs.The vertical and horizontal sweep modulegenerates the vertical and horizontal sweeps used todrive the CRT yoke. It provides these drive outputs tothe sweep heat sink module. The sweep modulereceives feedback signals from the sweep heat sinkmodule to update and maintain the proper driveoutputs.The sweep heat sink module receives the verticaland horizontal drive signals and provides the properlevel of yoke drive to the CRT. The sweep heat sinkmodule also sends feedback signals to the monitorcircuits in the vertical, sync, CRT protect, andbrightness control module.The image presented on the video indicator is aTV picture of the IR energy scanned by the receiver.The video indicator is independent of the BITEsubsystems of the other WRAs. Only the STATUSlight and picture are indicative of a properly operatingvideo indicator.Figure 6-27.-Video Indicator block diagram.6-27
REVIEW QUESTIONSQ1. Where does the IR frequency range fall in theelectromagnetic spectrum?Q2. How do the IR waves differ from any otherwave in the electromagnetic spectrum?Q3. Realistically, what is the best emissivity of anobject?Q4. What is a good example of an imagingdetector?Q5. What is the major disadvantage of a detectorarray?Q6. How wide is the space between the detectorelements in a linear array?Q7. Is a typical IRDS an active or passive system?Q8. In a typical infrared system, how manydetector elements are used to get the 360 linesof video?Q9. How are the six heaters connected in the heatexchanger?Q10. What are the four operational modes ofoperation in the IRDS system?Q11. True or False. The BITE testing of the systemwill indicate a video indicator fault.6-28
CHAPTER 7WEAPONS SYSTEMSAs a result of major developments in currentaircraft design and computer technology, modernaircraft are able to deliver sophisticated weapons to atarget automatically and with unprecedentedaccuracy. These aircraft are designed and built as acompletely integrated weapons system. The weaponssubsystems are interconnected and dependent, tosome extent, on each other or on other aircraftsystems. For example, the bomb release system insome modes of operation is dependent upon theaircraft’s flight control system. In another example,the missile system is interconnected with the aircraft’sradar system for missile guidance. In addition todelivering weapons more accurately, thecomputer-controlled weapons systems provide ahigher degree of safety by significantly reducing thedegree of human error.When avionics technicians are testing, troubleshooting,or performing maintenance on an avionicssystem, they must be aware of the effects the systemcan have on ordnance, either loaded or to be loaded onthe aircraft. To complicate matters, most aircraft inthe Navy’s inventory are multimission aircraft. TheF/A-18 is used as a fighter and an attack aircraft. TheP-3C is an antisubmarine warfare (ASW) and a patrolaircraft. The aircraft discussed in this chapter are thefighter, fighter/attack, and the ASW aircraft.FIGHTER AIRCRAFT WEAPONSSYSTEMSLearning Objective: Recognize variousfighter aircraft weapons systems and theiroperating functions.the following systems and subsystems: armamentbasic controls and components, missile controlsystem, multiple weapons release system, M61A120-mm automatic gunfire control system,AN/AWW-4 fuze function control system,AN/ALE-29A or AN/ALE-39 decoy dispensingsystem, and a jettison system.Armament Basic Controls and ComponentsThe F-14 armament system consists of thefollowing basic controls and components that arecommon to all systems: the air combat maneuver(ACM) panel, the armament control panel, the displaycontrol panel, the control stick, the master lightcontrol panel, the landing gear handle, and thearmament safety override switch.AIR COMBAT MANEUVER (ACM)PANEL.— The ACM panel (fig. 7-1) is located on theforward cockpit center console. It contains switchesfor missile preparation, missile operating modeselection, and for arming the systems. Indicators areprovided to inform the pilot of weapon status, whenthe missile is locked on to the target, and when themissile is ready to be launched. The ACM panelswitches are discussed in the following paragraphs.Master Arm Switch.— This switch is importantto the avionics technician who must be aware thatwhen the guard switch is raised and the switch is set toON, a master arm signal is sent to the armament panelto enable the master arm logic circuitry.The following discussion of the F-14 and theF/A- 18 aircraft will provide you with information onthe available aircraft armament systems and the basiccontrols and components for both the fighter and thefighter/attack aircraft.F-14 AIRCRAFT WEAPONS SYSTEMSThe F-14 aircraft is a two seat, supersonic fighteraircraft. The aircraft’s armament system consists ofFigure 7-1.-Air combat maneuver (ACM) panel.7-1
CAUTIONBefore applying external power, thetechnician must ensure that all armamentswitches are in their proper position. Ifthey are not, the technician must notify theappropriate person(s). Failure to do socould result in injury or death to personnelor damage to the aircraft/weapon systems.ACM Switch.— This switch is a cam-type switchthat is activated when the switch guard is moved up toselect the ACM encounter mode. The normal missilemode is automatically selected.ACM JETT Switch.— This switch is apush-button switch located under the ACM switchguard. When the switch is pressed, the stores on thestations that are selected on the armament panel arejettisoned.HOT TRIG (Trigger) Warning IndicatorLight.— This warning indicator lamp lights to notifythe pilot that missiles are ready for launching, the gunis ready to fire, or the weapons selected are ready forrelease or firing.Weapon Status Indicators.— These indicatorsindicate weapon status when the landing gear handleis in the UP position. These indicators are labeled 1A,1B, 3, 4, 5, 6, 8B, and 8A. They correspond to theweapon stations on the aircraft. There are threeindications possible:1. White indication—Weapon station is readyand weapon is loaded.2. Checkerboard indication—Weapon station isloaded, ready, and selected. Only one weapon statusindicator is checkerboard at any one time.3. Black indication—Weapon station has noweapon loaded, or the weapon is not ready.ARMAMENT CONTROL INDICATORPANEL.— The armament control indicator panel(fig. 7-2) is located in the aft cockpit console andcontains the following selector switches: attackmode; weapon type; electric fuze; delivery mode andoptions; station select; missile options; missile speedgate; and select jettison, tank jettison, and jettisonoptions.DISPLAYS CONTROL PANEL.— The displayscontrol panel (fig. 7-3) is located in the forwardcockpit right vertical console. This panel containsFigure 7-2.-Armament control indicator panel.7-2
Figure 7-5.-Master light control pannel.Figure 7-3.-Displays control panel.push-button mode selection switches forair-to-ground or air-to-air selection. The panel alsocontains the all-weather landing/precision coursedirection push-button switch for air-to-air modeselection. The all-weather landing/precision coursedirection switch is used when weapons are to bereleased using the data link system.CONTROL STICK.— The control stick(fig. 7-4) is located in the forward cockpit andcontains the weapons selector button, weapon trigger,bomb release push button, and the DLC/CHAFFDISPENSE push button.MASTER LIGHT CONTROL PANEL.— Themaster light control panel (fig. 7-5) is located on theright side console of the forward cockpit and containsthe ACM thumb-wheel control. This thumb-wheelcontrols the 26-volt ac to the ACM panel indicatorlights.LANDING GEAR HANDLE.— The landinggear (LDG GEAR) handle (fig. 7-6) is located on theleft vertical console of the forward cockpit.Movement of the LDG GEAR handle operates a switchassembly that functions as an armament safety device.This assembly prevents inadvertent missile launching,bomb release, rocket firing, and ACM encounterjettison of external weapons/stores when the aircraftFigure 7-4.-Control stick.Figure 7-6.-Landing gear handle.7-3
is on the ground. Master arm power is removed whenthe handle is in the DOWN position, but is availablewhen the handle is in the UP position.ARMAMENT SAFETY OVERRIDESWITCH.— The armament safety override (ARMTSAFETY ORIDE) switch (fig. 7-7) is located in thenosewheel well. This switch is a magnetically heldclosed switch. The switch is used as an armamentsafety override to bypass the open landing gear safetycircuit when the LDG GEAR handle is in the DOWNposition. This switch enables technicians to performfunctional checks while the aircraft is on the ground.Missile Control SystemThe missile control system consists of the basiccontrols and components previously discussed, andthe following controls and components: the weaponsstatus indicators, the liquid (LIQ) cooling controlpanel, and the aft cockpit caution advisory panel.Multiple Weapons Release SystemThe multiple weapons release system comprisesthe basic controls and components, as well as themultiple weapons systems controls and components.M61A1 20-mm Automatic Gunfire ControlsystemThe M61A1 20-mm automatic gunfire controlsystem enables selecting, arming, and firing of thegun. Depending upon the mission objective, thegunfire control system can be operated in an air-to-air(A/A), air-to-ground (A/G), or air-combat maneuver(ACM encounter) mode.AN/AWW-4 Fuze Function Control SystemThis system is used to provide a high dc voltagefor the charging and arming of electrical bomb fuzes.It also provides voltage for the electrical initiation ofthe VT or proximity fuze. The faze is called a VTfuze because the original device contained vacuumtubes.Decoy Dispensing SystemsThe F-14 aircraft uses the AN/ALE-29A or theAN/ALE-39 decoy dispensing system to eject decoyrounds into the air. These rounds consist of chaffpackages or flares. Releasing these rounds allows theaircraft to evade air-to-air and surface-to-air attacks.The location of the decoy dispenser is shown infigure 7-8.Jettison SystemThe jettison system enables the jettisoning ofcertain external stores. There are four jettison modes:1. Emergency—Pilot controlled.2. ACM encounter—NFO selected, pilot controlled.3. Selective—NFO controlled.4. Auxiliary—NFO controlled.The NFO is the person in the back seat of theaircraft. The NFO selects and controls the jettison byusing the armament control indicator located in the aftcockpit (fig. 7-2). In all modes, arming and fuzing areFigure 7-7.-Armament safety override switch.7-4
Rocket firing systemWalleye systemAN/AWW-7 data link systemAGM-65 Maverick fire control systemAGM-88 HARM fire control systemAIM-7 Sparrow fire control systemAIM-9 Sidewinder fire control systemM61A1 20-mm gun systemAN/ALE-39A decoy dispensing systemF/A-18 Armament Basic Controls andComponentsFigure 7-8.-Decoy dispenser configuration on aircraft.disabled during jettisoning. The landing gear handlemust be in the UP position for all modes exceptemergency.F/A-18 AIRCRAFT WEAPONS SYSTEMSThe F/A-18 aircraft is a single seat, dual role(fighter/bomber), supersonic aircraft. Provisions areavailable in the aircraft for the application of externalpower. The external power connector connects115/200 volt, three-phase, 400-Hz ac power to the acbus. When external power is not available, there is anauxiliary power unit (APU) to drive either of theaircraft generators for functional checkout of theaircraft systems.The F/A-18 armament system consists of thefollowing systems and subsystems:. F/A-18 armament basic controls and componentsl AN/AWW-4 fuze function control systemThe F/A-18 armament system consists of thefollowing basic controls and components that arecommon to all systems: the ground power controlpanel assembly, the landing gear control handle, thearmament safety override switch, the master armcontrol panel assembly, the aircraft controller gripassembly, and the two digital display indicators.GROUND POWER CONTROL PANELASSEMBLY.— A ground power control panelassembly provides four toggle switches, three ofwhich control the application of external power toavionic and instrument systems. This preventsexcessive equipment operation time because of otherunassociated ground operations.The EXT PWR switch is a three-position switchthat applies electrical power to the aircraft. In theNORM position, electrical power is supplied to theaircraft. In the OFF position, no power is supplied tothe aircraft. The RESET position resets power for theexternal monitoring circuit when there is a temporaryoverload. Switch 1 is a three-position switch with BON to provide enabling power to the missioncomputers. Switch 2 is a three-position switch with BON to provide enabling power to the digital displayindicators (DDIs) and the radar. Switch 3 isthree-position switch with B ON to provide enablingpower to the armament computer, the AN/AWW-4system, the HARM system, and the AN/ALE-39Asystem.7-5
Figure 7-9.-Landing gear control handle.LANDING GEAR CONTROL HANDLE.—The LDG GEAR control (fig. 7-9) in the DN positiondisables normal weapon release, launch, and firesignals. In the UP position, 28-volt dc power isapplied from the main landing gear weight-off-wheelsrelay to the master arm circuit breaker.ARMAMENT SAFETY OVERRIDESWITCH.— The armament safety override switch(fig. 7-10) is on the maintenance panel that is locatedin the nosewheel well. In the override position, itoverrides the landing gear handle DN position toenable weapons systems for ground operationalmaintenance.MASTER ARM CONTROL PANELASSEMBLY.— The master arm control panelassembly (fig. 7-11) is located in the cockpit. Itcontains the A/A, A/G, and the MASTER switches.The A/A and A/G switches are push-button switchesthat provide a ground to the stores managementprocessor (SMP). They select the air-to-air orair-to-ground computer modes, respectively. TheMASTER switch is used in conjunction with the LDGFigure 7-11.-Master arm control panel assembly.GEAR handle or the armament safety overrideswitch. In the SAFE position, weapons cannot bereleased or fired. Emergency jettison can be initiatedwhile this switch is in the SAFE position. The ARMposition provides an input to the SMP and power forweapns release, fire, or jettison. The switch position(SAFE/ARM) will be displayed on the DDIs in thewing-form display.AIRCRAFT CONTROLLER GRIPASSEMBLY.— The aircraft controller grip assembly(fig. 7-12) contains the A/G weapons release switch(bomb release switch). The switch is spring-loaded tothe OFF position. When the switch is pressed, itcompletes a circuit from the SMP and provides aninput back to the SMP. The aircraft controller gripassembly also contains an A/A switch and the triggerswitch.Figure 7-10.-Armament safety override switch.DIGITAL DISPLAY INDICATORS DDIs).—The digital display indicators (fig. 7-13) are locatedon the main instrument panel vertical consoles. TheDDIs monitor the SMP and display that information.The DDIs always have a wing-form display, and whenin the air-to-ground mode, a program list. The wingformdisplay, program list, and switches/controls onthe DDIs are discussed in the following paragraphs.7-6
The wing-form display is displayed in theair-to-air and the air-to-ground computer modes. Itidentifies what is loaded on all stations except thewing tip AIM-9 stations, which are always displayed.The weapon loaded is displayed on the DDI by theappropriate acronym. When weapons are loaded onthe stations, the type of weapon is coded into the SMPduring loading procedures. Thus, when selected, theDDIs display the appropriate acronym. An acronymis an abbreviated number and letter, such as 1 82B,which indicates that one Mk 82 blunt-nose bomb isloaded.Figure 7-12.-Aircraft controller grip assembly.The push-button switches around the DDIs areused to select weapons, various functions, and modeoptions of a function (if any). For example,mechanical fuzing (MFUZ) is one function and noseFigure 7-13.-Digital display indicators.7-7
(NOSE), nose/tail fuzing (N/T), and long-delayfuzing (LDLY) are the selectable options.Weapon selection for air-to-ground weapons isaccomplished by pressing the push-button switchlocated next to the acronym of the weapon desired.When the weapon is selected, a box lights around theacronym. When the MASTER switch is in the SAFEposition, an X appears superimposed through theacronym. When the MASTER switch is in the ARMposition, the X is removed and RDY is displayedunder the box light around the acronym. A box alsoappears around the acronym of the weapon in thewing-form display for the first priority (first station infiring sequence) station that has this particularweapon loaded. Also, this weapon acronym isdisplayed next to WPN in the program list.Armament ComputerThe armament computer (SMP) is shown infigure 7-14. The computer is interfaced with andcontrolled by the digital computers in the aircraft.The SNIP is also interfaced with and controls theweapons station command encoders/decoders. TheSMP has a weapon insertion panel with code wheels.These code wheels are used to enter the code into theweapon-type (ARMAMENT) and nose/tail fuzes(FUZING). The weapon-type code must match theweapon loaded. The nose/tail fuze codes must becompatible with the weapon, or the SMP will notFigure 7-13.-Digital display indicators—Continued.7-8
Figure 7-15.-Emergency jettison control panel assembly.Figure 7-14.-Armament computer (stores managementprocessor) (SMP).allow it to release normally. For weapons withoutnose/tail fuzes, the codes must still match the weaponloaded. AIM-7 missiles loaded on fuselage stations 4and 6 do not require a weapon code.Digital ComputersDigital computers make up the mission computersystem and control the avionics systems. The yinterface with the SMP and allow the SMP to routepower to the encoders/decoders for weapons release.The digital computers are controlled by the MCswitch on the MC/HYD ISOL panel. When the MCswitch is in the 1 OFF position, power is removedfrom mission computer No. 1. When in the NORMposition, power is applied to mission computers Nos.1 and 2. When in the 2 OFF position, power isremoved from mission computer No. 2.The command encoders/decoders provide aninterface with the SMP and the weapons loaded.When the SMP supplies power to the encoders/decoders, they allow the weapon release.JETT switch (fig. 7-15) is on the emergency jettisoncontrol panel assembly.The JETT STATION SELECT switches (fig.7-16) are on the flaps, landing gear, and storesindicator panel. When the switches are pressed, aground is provided to the SMP and the station isselected. The SELECT JETT switch is located on theleft-hand vertical control panel assembly. The rotaryportion of the switch selects the fuselage missilestations (L FUS MSL/ R FUS MSL/ RACK LCHR/STORES) to be jettisoned.The auxiliary jettison is a gravity mode ofjettisoning used on the five pylon stations whenemergency and selective jettison fails. Conditions forjettisoning are as follows: the landing gear handle inthe UP position, all gear up and locked, MASTERswitch to ARM, stations selected by the JETTSTATION SELECT switches, AUX REL switch toENABLE, and the bomb-release switch pressed. TheAUX REL switch is located on the ECM control panelassembly. When it is positioned to ENABLE, itprovides a ground to the SMP and allows the auxiliarycartridge to fire when the bomb-release switch ispressed.Jettison SystemThe jettison system provides a method ofjettisoning weapons, stores, launchers, and fuel tanks.The jettison system has three modes of release—emergency, selective, and auxiliary.The emergency jettison mode jettisons allweapons from the five pylon stations. Conditions forjettisoning are weight-off-wheels or landing gearcontrol handle in the UP position and the EMERGJETT PUSH TO JETT switch pressed. The PUSH TOFigure 7-16.-Jettison station select stitches.7-9
Bomb Release SystemAN/AWW-7B Data Link SystemThe bomb release system provides the aircraftwith capabilities for release of conventional weapons.Normal release is provided in four electrically controlledmodes of operation. Release is accomplishedby electrically firing two gas-generating cartridges inthe breech housing unit in the bomb rack. The systemconsists of the armament basic controls and components.AN/AWW-4 Fuze Function Control SystemThe AN/AWW-4 fuze function control systemprovides the aircraft with capabilities for the use ofelectric fuzes. Voltage is supplied by the PP-6419power supply to the bomb arming unit through theaircraft wiring. There are four voltages selected onthe DDIs. When release is initiated, a voltage issupplied through an interconnecting cable to theweapon during the first few inches of fall of theweapon. No voltage is supplied to the bomb rackuntil the bomb-release switch is pressed. The systemconsists of the power supply and the armament basiccontrols and components.The AN/AWW-7B data link system is used withthe Mk 21 and Mk 27 Walleye weapons. The data linksystem provides control and guidance to theseweapons with a data pod externally mounted to theaircraft. The system consists of the armament basiccontrols and components.AGM-65 Maverick SystemThe AGM-65 Maverick system provides theaircraft with the capability for firing the Maverickmissile. Control of the missile is supplied through themissile control system while the AN/AWW-4 fuzefunction control provides fuze arming. Video issupplied from the weapon to the DDIs. No voltage issupplied to the missile until the trigger switch ispulled. The system consists of the trigger switch andthe armament basic controls and components. Thetrigger switch is located on the aircraft controller gripassembly. The switch is a two-position detent switch,with the first detent initiating the camera operationand the second initiating missile launch.Rocket Firing SystemAGM-88 HARM SystemThe rocket firing system provides the aircraftwith the capability for firing rockets. When the bombrelease switch is pressed, voltage is supplied throughthe aircraft wiring to the vertical ejector rack (VER).Wiring within the VER allows the rocket to fire. Thesystem consists of the armament basic controls andcomponents.The AGM-88 HARM system provides the aircraftwith the capability for firing a HARM missile.Control of the missile is provide through the SMP.No voltage is supplied to fire the missile until thetrigger switch is pulled. The system consists of thetrigger switch and the armament basic controls andcomponents.Walleye Guided Weapon SystemAIM-7 Sparrow Fire Control SystemThe Walleye guided weapon system provides theaircraft with the capability for the release andguidance of a Walleye weapon. Video is suppliedfrom the weapon through the aircraft wiring to theDDIs. No voltage is supplied to the bomb rack untilthe bomb release is pressed. The system consists ofthe CAGE/UNCAGE switch and the armament basiccontrols and components. The CAGE/UNCAGEswitch is located on the throttle. When the switch ispressed, the selected weapon is either caged oruncaged.The AIM-7 Sparrow fire control system providesthe aircraft with the capability for firing an AIM-7missile. Control of the missile is supplied through theSMP and the radar system. No voltage is supplied tofire the missile until the trigger switch is pulled.Weapon selection is accomplished by the A/A weaponselect switch on the aircraft controller grip assembly.The system consists of the RADAR switch,CAGE/UNCAGE switch,controls and components.and the armament basic7-10
The A/A weapon select switch selects theSparrow missile on the priority station when theswitch is in the FWD position. Each time the switchis depressed, the priority station changes. SEL isdisplayed on the DDI underneath the SP acronym ofthe station selected. An X is superimposed throughthe SP when the missile is not tuned. The Xdisappears when the missile tunes. The RADARswitch is located on the sensor control panel.AIM-9 Sidewinder Fire Control SystemThe Sidewinder fire control system provides theaircraft with the capability for firing a Sidewindermissile. Control of the missile is provided throughthe SMP. No voltage is supplied to fire the missileuntil the trigger switch is pulled. Weapon selection ismade by the A/A weapon select switch on the aircraftcontroller grip assembly. Tone volume is controlledby the WPN VOL switch. The system consists of theIR COOL switch, trigger switch, and the armamentbasic controls and components.The A/A weapon select switch selects theSidewinder missile on the priority station when theswitch is in the DOWN position. Each time theswitch is depressed, the priority station changes. SELis displayed on the DDI underneath the SW acronymof the station selected. The WPN VOL switch is onthe intercommunication amplifier control panelassembly.The IR COOL switch is a three-position switch onthe map gain control panel assembly. When theswitch is in the OFF position, coolant is disabled tothe seeker heads unless weight is off the wheels, theMASTER switch is in the ARM position, and thestation is selected. In the NORM position, coolant isenabled to all seeker heads when the weight is off thewheels. In the ORIDE position, coolant is enabled toall seeker heads when power is applied to the aircraft.M61A1 20-mm Gun SystemThe M61A1 20-mm gun system provides theaircraft with the capability for firing the gun. Thesystem enables selecting, arming, and firing.Depending upon the mission objective, the gun can beoperated in the A/A or the A/G computer modes. Inthe A/G mode there are two submodes. The twosubmodes are the continuously computer impact point(CCIP) and the manual (MAN) modes. There arethree A/A modes. These are the director, disturbed,and the cage modes. Control of the gun is suppliedthrough the SMP. No voltage is supplied to the gununtil the trigger switch is pulled.AN/ALE-39 Decoy Dispensing SystemThe AN/ALE-39 decoy dispensing systemprovides the aircraft with the capability for dispensingchaff and flares. The decoy rounds are contained intwo dispensers at the fuselage underside area.Control is supplied through the SMP. The systemconsists of the dispenser/ECM control panel, enginethrottle lever grip assembly, left console DISP switch,the ALE-39 programmer, two AN/ALE-29Adispensers, and the armament system basic controlsand components.ANTISUBMARINE WARFAREWEAPONS SYSTEMSLearning Objective: Recognize variousweapons systems on ASW type aircraft.Antisubmarine warfare (ASW) is becoming anever broadening field. Our ASW capabilities havebeen improving constantly. As a senior avionicstechnician, you must play the key role in maintainingthe ASW platform used for in-flight launching ofsearch and kill stores. When launched at preciseintervals and locations and in conjunction with theaircraft’s electronic data processing equipment, thesestores provide accurate information for detectingenemy submarines. The kill stores consist mainly oftorpedoes, mines, bombs, rockets, and guidedmissiles.The remainder of this chapter discusses thebasic ASW system, the P-3C and S-3A search storesystems, the helicopter search store systems, theP-3C and S-3A kill store systems, and the helicopterkill store systems. Finally, the control systems forrelease and control of search and kill stores arediscussed.BASIC ASW WEAPONS SYSTEMSThe basic ASW weapons systems consist of theequipment and accessories necessary for carrying andreleasing the search and kill stores.7-11
Figure 7-17.-P-3C ordnance stations.Figure 7-18.-S-3A ordnance stations.In the P-3C, in addition to the eight bomb baystations, ten wing stations are available for thecarriage of a variety of stores. Forty-eightunpressurized, three pressurized, and one free-falllaunch chutes are used in the search store system(fig. 7-17).In the S-3A, two bomb bays with two stationseach and two wing stations are available for storecarriage. Sixty unpressurized launch chutes are usedin the search store system (fig. 7-18).The weapons control system of each aircraft hasthe units, panels, switches, logic circuits, interfaces,computer, and controls necessary for selecting,arming, and releasing the kill or search stores.Additionally, status lights indicate store selectionerrors and store go or no-go status. Electrical jettisonrelease systems are incorporated to release or eject allkill stores of the P-3C aircraft, and the wing stationsand all search stores of the S-3A aircraft.Figure 7-19.-P-3C SLT arrangement.7-12
Part of the system consists of unpressurized, sizeA sonobuoy launch tubes (SLTs) installed in theunderside of the aircraft fuselage. Forty-eight of theSLTs on the P-3C and all of the S-3A SLTs (60) are ofthis type. These SLTs are not accessible from insidethe pressurized aircraft. Figure 7-19 shows thearrangement of the P-3C SLTs (as you lookup at thelower fuselage), while figure 7-20 shows the S-3Aarrangement.Figure 7-20.-S-3A SLT arrangement.FIXED-WING SEARCH STORE SYSTEMSThe search store systems of the P-3C and theS-3A aircraft consist mainly of the equipment andaccessories necessary to carry and release sonobuoys.The sono systems also have the capability for carriageand release of several other search related stores.The P-3C also has three pressurized size ASLTs (fig. 7-21) and one unpressurized size Bfree-fall chute. These are accessible from insidethe aircraft, and are reloadable in flight. Size Achutes are approximately 5 inches in diameter,and the size B chute is approximately 7 inches indiameter.The size B chute is a tube with a pressure-sealingcover at the top end. If it is pressurized, the cabin ofthe aircraft must be depressurized before you open theFigure 7-21.-Pressxurized size A sonobuoy launch tubes.7-13
sealing door of the chute. The chute may then be usedfor manually expending miscellaneous items less than7 inches in diameter. The size B chute has noconnecting electrical circuits.All of the size A SLTs in both aircraft haveelectrical connections that interface with the aircraftcomputer. There are also connections for the manualmode control circuits for sono inventory andlaunching.Sonobuoys, Mk 58 and/or Mk 25 marine locationmarkers (MLMs), and signal underwater sounds(SUSs) can be loaded into sonobuoy launchcontainers (SLCs). The Mk 25 MLMs and SUSs maybe dropped from the size B chute of the P-3C. After astore is loaded into the SLC, with the appropriate padsand spacers, an end cap is installed at the open endand marked with information of the enclosed store.The end cap has two protruding pin lugs, which matewith slots on the SLC to Iock the store in place. Thelugs shear when the cartridge-activated device (CAD)is fired. When the CAD fires, everything in the SLCis ejected.NOTE: Some sonobuoys may be receivedprepackaged in disposable SLCs. Thisdeletes the need for loading SLCs at theorganizational maintenance level.Before you load the SLCs into the SLTs, youshould perform a no-voltage and stray-voltage checkon the sono circuits at the sonobuoy safety switch forthe S-3A, and on the sono launch circuit tester in theP-3C. The safety switch on both aircraft is locatedadjacent to the SLTs and is actuated to the safeposition when the switch access door is open.The SLC, with CAD installed, is loaded into adesignated SLT according to the load plan. Thelocking lugs at the CAD cap mate with the lockinglugs of the SLT. The CAD is pressed against theelectrical firing pin in the SLT breech assembly. Inthe S-3A, tube P2 is always loaded with an SLCcontaining a search and rescue (S AR) sonobuoy.The P-3C also has a stowage rack inside the aircraftfor 36 SLCs for use in the four SLTs inside thecabin.When the SLCs are loaded, the areabeneath the loaded SLTs is cleared, and thesafety switch door is closed. When the door isclosed, the cockpit sono disabled indicationwill be extinguished. A continuity check isperformed by the aircraft circuits on the CADs,and the load status verified by using the sonoselect switches of the particular aircraft. Theswitch door is opened again, and the system isdisabled until just before takeoff. The loadplan is given to the tactical coordinator(TACCO) for computer programming of thespecific store in each SLT, and in the case ofthe P-3C, the stowage rack.Release of the SLT stores in flight is normallyactivated by the aircraft computer. The computeris programmed by the TACCO and controlled bythe pilot’s or TACCO’s keyset in the P-3C. In theS-3A, the TACCO’s keyset programs andcontrols the computer. The manual release modeis normally used only during maintenance testingand system checks, and as an emergency backupfor the auto mode. Emergency jettison of theSLTs is not included in the P-3C system. In theS-3A, it is part of the jettison circuit, and whenactivated, will jettison 59 of the 60 SLCs in lessthan 10 seconds. Until the pilot initiates circuitactivation, the SAR buoy will remain in the P2chute.CAUTIONWhen either type of aircraft is on the deck,the switch access door should be open toprevent inadvertent firing of the SLTstores. Inadvertent firing may cause injuryor death to personnel, and will causedamage to the equipment.HELICOPTER SEARCH STORE SYSTEMThe search store system of helicopters is lesscomplex than that of the fixed-wing aircraft justdiscussed, but it serves the same purpose. Figure7-22 shows some of the basic search store equipments7-14
Figure 7-22.-SH-3 (series) search and kill stores.7-15
of the SH-3 series helicopter, and figure 7-23 showsthe basic equipments of the SH-60 series helicopter.Both types of helicopters have various models withdifferent configurations. In this chapter, no specificmodel is discussed.SH-3 Series Helicopter Sonobuoy LauncherThe launcher used in the SH-3 series helicopterprovides a means for free-fall launching ofsonobuoys. The system consists of a control paneland 12 launcher tubes (size A), which areincorporated as an integral part of the airframe. Eachtube contains a retention gate that can be electricallyor manually released to launch the individualsonobuoy. A tube-loaded microswitch operates apanel light when the selected tube is loaded.SH-60 Series Helicopter Sonobuoy LauncherThe SH-60 series sonobuoy launcher is designedto pneumatically launch up to 25 sonobuoys. Thebuoys exit from the launcher on the left-hand side ofthe aircraft. The system consists of a launcherassembly, a distributor valve, a high-pressure airbottle, and an electrical control unit (ECU). The airFigure 7-23.-SH-60 (series) search and kill stores.7-16
ottle and the ECU are mounted on top of thelauncher assembly. A servicing valve is provided, onthe left-hand side of the helicopter, for servicing theair bottle. The air bottle should be serviced to1200-1250 psi. This ensures that the system will beable to launch all 25 sonobuoys.The distributor valve assembly uses a steppingmotor to route air pressure to the selected launch tube.A manual selection knob, distribution lock, andtube-selected indicator window are located on thevalve. The manual selection knob can be hand rotatedto move the rotary valve to vent or to any desiredlauncher tube position. The valve lock allows therotary valve to be manually secured to any desiredlauncher tube position or vent. The tube-selectedindicator window displays the position of the rotaryvalve at any one of 25 tubes or vent.The ECU front panel contains three controlsand one indicator. The controls are aAUTO/MANUAL switch, a SELF TEST switch,and a SAFE switch. The indicator is a STATUSdisplay. When the AUTO/MANUAL switch is inthe AUTO position, the ECU controls the rotaryvalve. In the MANUAL position, the rotary valve iscontrolled by manually turning the manual selectionknob. Depressing the SELF TEST switch initiatesthe BITE testing for the ECU and the launcher. TheSTATUS indicator displays any faults found duringself-test. If more than one fault is found, the failurecodes will cycle at 3-second intervals. The SAFEswitch causes the rotary valve to move to the ventposition.FIXED-WING KILL STORE SYSTEMSThe kill store system consists of all equipmentnecessary to select, arm, and release weapons fromthe bomb bay(s) and wing stations of the aircraft. Thesystem is divided into two subsystems—the bomb bayand the wing store systems.Bomb Bay SystemThe bomb bay system consists of the units andcomponents necessary for the carrying, arming, andreleasing of stores. On the P-3C, these stores areinstalled on bomb racks suspended from removablepylon assemblies, which are mounted across thecenter of the bomb bay. On the S-3A, the racks areattached to brackets mounted to the aircraft in acruciform pattern. Each of these basic installations isassigned a station number. Numbers followed byletters (such as A or B) designate these stations forspecial capacities or types of stores. In addition, thesestations are arranged in pairs: stations 1 and 2,stations 3 and 4, etc. As a further identificationfeature on the P-3C, the stations are grouped into twolayers. Odd numbered stations in the upper layer andeven numbered stations in the lower layer. When thebomb bay is loaded with mixed stores, each pair ofstations must be loaded with the same type of store toensure proper clearance between the stores. The S-3Ahas only one layer of stations because of its muchsmaller bomb bays.The bomb bay doors are electrically controlledand hydraulically operated. For ground maintenancewithout power, the doors may be opened or closedinternally on the P-3C by a manual control valve andhand pump. On the S-3A, the doors can be operatedexternally with a 3/8-inch drive crank. Both aircrafthave a ground safety pin that is used to disable thedoor mechanism in the open position. The door safetypin must be inserted when personnel are working inthe bays.The release of bomb bay stores is normallyaccomplished by the computer. In the P-3C, theTACCO performs programming, and the pilot orTACCO controls the release. In the S-3A, theTACCO does both, with the copilot acting as backup.The pilots in both aircraft have final control becausethey must activate the master arm switch.Wing Store SystemThe wing store system consists of the unitsand components necessary for carrying, arming,and releasing external stores. On the P-3C, thesestores are suspended from 10 wing stations,numbered 9 through 18. On the S-3A, the storesare suspended from two wing stations, W5 (left)and W6 (right).7-17
P-3C WING LAUNCHER ASSEMBLY.— TheP-3C wing launcher assembly universal pylon isshown in figure 7-24. It consists of a pylon assemblysupporting an Aero 65A-1 bomb rack with two Aero1A adapters, four sway braces, and an emergencyrelease jettison mechanism. Three hoist positions areidentified by decals, and are labeled A, B, and C.Their use is determined by the relationship of thestore suspension lugs to the center of gravity (CG) ofthe weapon. The rear sway braces are positioned at aforward or aft mounting position, depending uponweapon length and contour. The forward position isused with 500- and 1,000-pound mines, and the aftposition is used with the 2,000-pound mines. Thewing launcher fairing is trimmed to fit the wingcontour at one station, and is not interchangeablebetween stations after trimming. Jettison operation ofweapons occurs when the jettison solenoid in thewing launcher is energized. The solenoid-actuatedlinkage connects to the Aero 65A-1 manual releasecable. The jettison solenoid and linkage must becocked before loading.S-3A PYLON/RACK ASSEMBLY.— The S-3Apylon/rack assembly (fig. 7-25) consists of a pylonsupporting a BRU-11A/A ejector rack. The rack is aself-contained unit that performs all the functions ofcarrying, arming, and releasing the stores. It iscontrolled by the aircraft armament circuits. Thepylon provides structural attachment between theaircraft wing and rack. It also contains the necessarywiring and components to connect the rack to releaseand status indicating circuits.HELICOPTER KILL STORE SYSTEMThe kill store system of the SH-3 series helicopterconsists of control panels, interconnecting electricalunits, and four launchers. The SH-60 serieshelicopter has either two or three launchers. On theSH-3 series helicopter, the launcher consists of an Mk8 Mod bomb shackle, an Aero 7 series release unit,mechanical arming units, and accessories varied bylocation for a particular model. The SH-60 serieshelicopter uses the BRU-14/A bomb rack attached tothe pylons. Each type of helicopter is designed torelease and jettison electrically through normal andjettison-release circuits.FIXED-WING RELEASE AND CONTROLSYSTEMThe functions of the fixed-wing release andcontrol systems are to provide necessary controls andFigure 7-24.-Wing launcher assembly universal pylon.7-18
Figure 7-25.-Pylon/rack assembly.circuitry for control and release of search and killstores from the aircraft.In the P-3C aircraft, system control is concentratedbetween the pilot and TACCO, with thecopilot and other crew members having minor controlfunctions. In the S-3A aircraft, the control isconcentrated between the TACCO and copilot. Thepilot and SENSO also have control functionsavailable. In both aircraft, the pilot has final controlover the release of stores through the master arm andsearch power switches.The basic operation of the release and controlsystems of both aircraft are discussed in the followingtext. Remember, this information is of a generalnature. For more detailed information, refer to theaircraft’s MIMs.OperationThe system’s primary mode of operation is theautomatic (on-line) mode. This mode uses thecomputer, logic units, crew member’s keysets, bombbay rack lock panel (P-3C), multipurpose datadisplays, pilot’s armament control panel (ACP), andother displays and panels to control and monitor thesystem. The manual mode uses the same components,less the computer and logic units, throughthe TACCO’s manual weapon control box (P-3C) andthe main auto key select on the pilot’s ACP (S-3A).AUTOMATIC MODE.— The automatic modepermits a method of search and kill store managementthat allows maximum flexibility and control of thesystem while minimizing the amount of necessarymanual action required by the aircrew. In theautomatic mode, the system is designed to have thecomputer and its subsystems perform the followingfunctions:1. Maintain an up-to-date inventory of all storeson the aircraft and provide weapon inventory that canbe called up for display on the TACCO’s auxiliaryreadout (P-3C) or any crew member’s MPD (S-3A).2. Determine the availability of a selectedweapon and select the weapon station from which theweapon is to be released (station priority).3. Energize the armament system relays at theproper time, in the proper sequence, and for theproper time duration to accomplish a store releaseunder joint computer and operator control.4. Instruct the operator, by cuing via a lightdisplay or readout on the MPD, to perform a manual7-19
operation. For example, the computer may cue theoperator to turn on the bomb bay door switch and themaster arm switch. The P-C3 computer also uses theordnance panel to instruct the ordnance crew memberon how to perform certain pressurized SLT loading orunloading operations (exchange between storage rackand SLTs). This enables the ordnance crew memberto make available the search store requested by theTACCO.5. Present the operator with alternatives forwhich decisions are required; for example, arming hasthree selections (nose, tail, or both). The computeralso furnishes alerts, such as components or circuitfailures and selections errors, to bring importantdevelopments to the operator’s attention.6. Calculate and initiate fly-to-point storereleases, intervals between releases for train releases,and furnish system release commands in response tocrew member release commands.7. Secure the system following each weaponrelease, check store-in-place status, update theinventory, and prepare the system for the next storeselection.MANUAL MODE.— In the P-C3, the manualmode provides the TACCO with managementcontrol of all kill and search stores. In the S-3A,each crew member controls kill and search storesunder the management of the pilot and TACCOconjunctival y.In the manual mode, the P-C3 TACCO/S-3A pilotselects the bomb bay or wing station for release, alongwith the arming and release mode of the selectedstore. These actions are executed by the control onthe weapons control panel. If required, the pilot iscued to turn on the master arm switch and open thebomb bay doors.When the station, arming, and release modes inthe P-C3 have been selected, the master arm powerwill be on, the bomb bay doors will open (ifrequired), and the kill ready lights on the ACP andTACCO manual weapons control panel willilluminate. If the selected station is loaded, thestation select keys on the ACP will light amber(S-3A). The store may then be released by the pilot,copilot, or TACCO (also the SENSO in the S-3A)by use of their release switches.The P-C3 search store release and control in themanual mode is completed by the ordnance crewmember using the controls on the search storesinterconnection box. The desired SLT is selected byusing the letter and number switches. This cues thepilot to turn on the search power switch. When theSLT has been selected and search power is on, alaunch is effected by actuating the sono launch switchon the search stores interconnection box.JettisonStore jettison of both aircraft is somewhat similarin operation and control. Manual actuation of thejettison or the external jettison switch by the pilotdisables the arming circuit and initiates jettison.In the P-C3, the jettison programmer isenergized and sends sequential release and bombbay door open/close signals. Wing stations arereleased in pairs (one from each wing) fromoutboard stations to inboard stations at 2-secondintervals. At this same time, the bomb bay doorsare opening. Then, the lower stations are released,the upper stations release after the lower stations,and then the doors are closed.A separate switch on the pilot’s console initiatesthe jettison function for wing stations only. Selectivejettison from any station may be accomplishedthrough normal manual release with the arming select(TACCO weapons panel) set on safe.In the S-3A, the wings and SLTs receive jettisoncommands from the wing and search store decoders torelease all wing stores and 59 SLTs. The SAR chuteremains loaded.Bomb bay stores, wing stores only, and wingstores from auxiliary devices (such as flare launchers)are released by using the ACP AUX rotary switch.This is done according to the load to be jettisoned. Inthis situation, the mechanical arm thumb-wheelselector must be set to safe, and the arm set switchdepressed. Armed store releases may also be initiatedin the above reamer.When the aircraft is on the ground, the jettisoncircuits of both aircraft are disabled by theweight-on-wheels switches. These switches arelocated on the right and left main landing gear (mainmounts).7-20
REVIEW QUESTIONSQ1. True or False. The weapons systems inmodern aircraft are completely independentof any other systems.Q2. What should an avionics technician do if thearmament switches are in the wrong position?Q3. What does the checkerboard symbolize on theweapon status indicators?Q4. What switch is used to enable groundtechnicians to perform functional checkswhile the aircraft is on the ground?Q5. What weapon does not require a weapon codewhen loaded on stations 4 and 6 on the F-18aircraft?Q6. How many bomb bay stations are available onthe P-C3 aircraft?Q7. How many launch chutes are available on theP-C3 aircraft? (Include all pressurized,unpressurized and free-fall chutes.)Q8. How many sonobuoys can the SH-60helicopter launch?7-21
CHAPTER 8COMPUTERSAs late as the middle 1970’s, the phrase “kick thetires and light the fires” was the main theme inlaunching an aircraft sortie. This meant that as longas there was an airframe with nothing falling off, anengine that would start and achieve takeoff speed, andair in the tires, the aircraft would be launched. Thiswas done so the pilots would get their flight timeevery month. Now the mission has become the primeobjective of the aircraft. This is not meant to belittlethe importance of the engine and airframe.Obviously, they are important, but the aircraft andpilots are designated to perform certain missions. Theperformance of these missions is dependent upon thestatus of the various avionics packages. If one ormore of these packages are degraded or not workingat all, the aircraft is considered to be partial missioncapable or not mission capable.This lack of mission capability has thrust many anavionics work center supervisor into the spotlight. Ifyou are one of the supervisors who has been there,then you know how pleasant the maintenance chief isto you. It is then that you realize that aircraftmaintenance is not a game. As we head toward the21st century, newer and more sophisticated aircraftare being designed and built. The avionics systemsare becoming more complex, thus allowing theaircraft to perform more difficult missions. Theincreased complexity forces the solutions to problemsin microseconds. The only system capable ofperforming these solutions is the computer. In turn,each associated avionics system will act as a sensorthat feeds continuously updated information to thecomputer. The computer processes the data and sendsout information to where it is needed.Because computers are used so extensively inNavy aircraft, the avionics supervisor must have abasic understanding and working knowledge ofcomputers.COMPUTER MAKEUPLearning Objective: Identify computerhardware and software.The electronic components of a computer arecommonly called hardware. Examples of computerhardware are cathode-ray tubes, transistors,microchips, printed circuit cards, etc. Software, onthe other hand, is a term that is applied to a set ofcomputer programs, procedures, and possiblyassociated documentation concerned with theoperation of a data processing system. Softwareincludes compilers, assemblers, executional routines,and input/output libraries. The advances in computersoftware provide the industry with the greatest realmof application possibilities. The problem ofattempting to communicate with a computer has led tothe development of symbolic languages that approachhuman language. The fact that a person can tell acomputer what to do, just as one directs the actions ofanother person, has been made possible by theadvances in software.Software is also used to overcome designdeficiencies in computers. Programming arounddesign deficiencies is a common practice in thecomputer industry. Software is, in fact, often used todetermine design feasibility. The practice ofdesigning a computer with a computer is a commonpractice of design engineers.Perhaps the best software application has been inthe area of real-time processing. Real-timeprocessing is a situation where the data is submitted toa computer, and an immediate response is obtained.The capability of a computer to perform real-timeprocessing could determine the success or failure ofan aircraft’s mission.Programming in a universal language has led tothe development and refinement of a number ofcomputer languages. Many of these languages are fora special area or purpose. For example, FORTRAN(FORmula Translator) for business and scientificprograms, COBOL (COmmon Business OrientedLanguage) for business, and Jovial for large scale,computer-based, command and control systems.PL/1 (Programming Language/one) is a language forreal-time systems. Each of the languages fulfills aspecific need for a specific problem, but lacks theuniversal ideal application.8-1
COMPUTER APPLICATIONSTYPES OF COMPUTERSLearning Objective: Identify computerapplications.Computer applications fall into a variety of broadcategories. Information retrieval is one suchapplication, or in a narrower sense, indexing orcataloging. Information is stored under a variety ofkey words or index headings. By calling up one ofthese headings, a listing of all or part of theinformation will be outputted by the computer.Another application is simulation. This involvessimulating the operation of a new computer by usingan older computer model. In this way, designdeficiencies can be identified without going throughthe time-consuming and expensive process ofbuilding the newer unit.Real-time control of a production process isanother application. For example, the petroleum andchemical industries put this process to good use. Thecomputer can detect minute changes in the productionprocess and initiate immediate corrective action.The advent of personal (home) computers hasgreatly expanded the computer-use horizon from theroutine upkeep of a checkbook balance to the morecomplex functions of financial planning, homesecurity, and computer video games.The application of the computer and its functionsis virtually endless. For this reason, there are somepeople who believe that the computer will sooncontrol everything and everyone. This is notnecessarily the case, however, as computers can doonly what their creators have intended them to do.The computer enables people to do more than theyhave been able to do in the past. For example,computations that required years to calculate byhuman methods can now be accomplished in a matterof moments by modern computers. This has becomeparticularly evident in our space program. The abilityto put a man on the moon and send Voyager I andVoyager II on their journeys would have beenimpossible without the use of computers. Fears overjob losses are, for the most part, needless. Whilesome jobs may be eliminated, new ones are created.Thus, a worker may have to learn a new skill. Forexample, a laborer may have to be retrained as acomputer programmer or operator. Rather thandestroying jobs, the computer creates opportunitieswhere none existed before.Learning Objective: Identify the types ofcomputers and the analytical processes usedby each type.In general, there are two basic types ofcomputers— analog and digital.ANALOG COMPUTERSThe term analog, as applied to computers,pertains to representation by means of continuouslyvariable physical quantities. For example, an analogcomputer can be a device that solves problems bysetting up electrical circuits that represent thephysical equivalents of certain phenomena. Then,measurements are made as these circuits are varied inaccordance with changes in the phenomena. Theanalog computer is by no means restricted toelectrical circuits as equivalents. The physicalequivalents may be gear trains, gases, fluids, etc.Analog computers, because of their nature, havesome inherent limitations. The use of physicalequivalents limits their versatility. They are limited toperforming only the tasks for which they weredesigned or, in certain instances, closely related tasks.DIGITAL COMPUTERSA digital computer is a device that solvesproblems by manipulating the numerical equivalentsof phenomena in accordance with mathematical andlogical processes. These numerical equivalents maybe expressed as binary numbers, octal numbers,decimal numbers, etc. In an electronic digitalcomputer, the numerical equivalents are generallyexpressed as binary numbers 1 or 0. Values of voltageand current are used to represent the 1s and 0s.The versatility of digital computers is based onthe fact that they use numerical equivalents not onlyto represent the data to be processed, but also theinstructions for processing the data. In other words,digital computers are generally provided with a widevariety of instructions. They are designed to respondin certain ways to the numerical equivalent of theseinstructions. Programming is merely a matter ofmodifying and/or arranging these instructions so thatthe computer will respond in a predictable manner toa given situation. While much more versatile than ananalog system, digital systems are still limited as to8-2
the variety of tasks they can perform by the followingfactors:l The design of their central processors. The variety of input/output devices usedl The programmer’s capability to develop anumerical method for representing and solving theproblemThere are two basic types of digital computers—the special-purpose and the general-purposecomputer.Special-Purpose Digital ComputersSpecial-purpose digital computers are designed tofollow a specific set of instruction sequences that arefixed at the time they are manufactured. To changethe operation of this type of computer, the actualconstruction of the machine has to be altered.General-Purpose Digital ComputersGeneral-purpose digital computers followinstruction sequences that are read into and stored inmemory prior to the calculation performance. Thistype of computer operation can be altered by inputtinga different set of instructions. Since the operation ofgeneral-purpose digital computers can be changedwith relative ease, as compared to special-purposecomputers, they provide a far greater usage flexibility.DIGITAL COMPUTER OPERATIONLearning Objective: Recognize the operatingprinciples of a digital computer.Each major section of the digital computer iscomprised of various electrical circuits. These circuitsinclude flip-flops (bistable devices), amplifiers, gates(such as AND and OR gates), and passive memoryelements. These elements are organized into registers,counters, and gates. Registers are a series of electronicdevices for temporary storage of a binary word.Counters are a series of electronic devices that progressthrough a specific binary sequence. The gates are usedto set a flip-flop or generate a times condition signal.The computer manipulates binary numbers representingnumerical values or conditions. Devices to retain thesebinary figures comprise the majority of the computerregisters, and each register has a distinct purpose orfunction. Many operations require that the binary wordor data be transferred from one register to another. It ispossible for several different words to be transferredsimultaneously.Gates are used to control the transfer of datawords from one register to another. These gatesconsist of diode and resistor networks. The gatecircuit generates a signal to transfer the contents ofone register to another at a particular time if certainconditions are met. For example, if the instructionbeing executed is an add, and if one of the numbersbeing added is a negative number, then the gate willgenerate a command signal. If these conditions arenot met, the gate will not generate the commandsignal.Several gates in the computer are active onlyduring specific instructions, such as divide ormultiply, and then only during that particularinstruction. On the other hand, some gates are activeduring several instructions, generating commandsignals. In the design of a computer, each instructionthat the computer is to perform is very methodicallyanalyzed, and for each signal required, a gate isdesignated to generate the signal.The size of the registers determines the generalsize of the computer. Not all registers in the computerhave the same word length. Some are determined bythe accuracy required, while others are determined bythe instruction word, number of addresses in thememory, and various other parameters.DIGITAL DATA PROCESSORLearning Objective: Referring to variousschematic and block diagrams, recognize thecomponents of a digital data processor andthe function(s) of each.Figure 8-1 is a functional block diagram of adigital data processing set. Of the processes that takeplace within a computer, the manipulation of data isFigure 8-1.-Digital data processor block diagram.8-3
the most important. This data manipulation takesplace within the central processor (CP) (areaencompassed by vertically dashed lines). The CPconsists of three basic units. These units are asfollows:. Control unit—This unit directs the overalloperation of the computer in accordance with aprescribed plan.l Arithmetic-logic unit-This unit performs theactual processing.. Internal data storage unit-This unit stores thedata to be processed and the prescribed plan(program).CONTROL UNITIn a typical digital computer, the control sectionincludes the instruction register, the P register, thegeneral register(s), and the SC register. A briefexplanation of each type of register follows:l Instruction register—This register holds theinstruction code during execution. The size of theregister is dependent upon the instruction word andmakeup of the computer. The instruction codeusually has more than one part or field.. P register—This register contains the addressof the next sequential instruction to be executed. Thecontents of the P register are automatically advancedby one by the P + 1 adder.l General register—This register stores thequantity used for address modification. In addition, itusually has the properties of automatic increment ordecrement. Most computers have more than onegeneral register.l SC register—This register consists of one ortwo registers to accomplish the holding of a shiftcount. Its size is dependent on the maximum numberof places that a word can be shifted.An easy way to comprehend the operation of thecontrol unit is to draw a comparison to a telephoneexchange. The act of dialing a phone numberenergizes certain switches and control lines in atelephone exchange. In a similar manner, eachprogram instruction, when executed, causes thecontrol section to energize certain “switches” and“control lines.” This enables the computer to performthe function or operation indicated by the instruction.A computer program can be stored in the internalcircuits of the computer, or it may be readinstruction-by-instruction from external media. Theinternally stored program type of computer is themost practical type to use when speed and fullyautomatic operation are desired. This type ofcomputer is known as a stored-program computer.In addition to the command that tells thecomputer what to do, the control unit also dictateshow and when each specific operation is to beperformed. It is also active in initiating circuits thatlocate information stored in the computer and inmoving this information to the point where the actualmanipulation or modification is to be accomplished.In the stored-program computer, the control unitreads an instruction from the memory section. Theinformation read into the control unit from memory isin the form of varying voltage levels that make up thebinary word. This word represents a specificoperation that is to be performed. The location of thedata to be operated on is generally a part of theinstruction and energizes circuitry that causes thespecified operation (add, subtract, compare, etc.) tobe executed. Subsequently, the control unit reads thenext instruction or jumps as directed to find the nextinstruction to execute.Computer instructions are broken down into fourgeneral categories. The instructions are transfer,arithmetic, logic, and control.Transfer commands transfer data from onelocation to another. One of the instructions is usuallyan address in memory, and the other is either a registeror an input/output device.Arithmetic instructions combine two pieces ofdata to forma single piece of data by using one of thearithmetic operations. In some computers, one of thepieces of data is in a location specified by an addresscontained in an instruction. The other piece of data isalready in a register (usually the accumulator). Theresults are usually left in the accumulator.Logic instructions make the digital computermuch more than an expensive adding machine. Theuse of logic instructions enables the programmer toconstruct a program capable of a number of tasks.These instructions enable a computer used forinventory maintenance to follow one set ofprocedures if an inventory item count is too high, andanother if the count is too low. The choice of whichset of procedures to use is made by the control unitunder the influence of the logic instructions. Logic8-4
instructions provide the computer with the ability tomake decisions based on the results of previouslygenerated data.Control instructions send commands to devicesnot under direct control of the control unit, such asinput and output units. The address portion of thecontrol instruction does not specify a location inmemory, but is usually a coded group that specifies anaction be required of a particular piece of equipment.In a single-address computer, where eachinstruction refers to only one address or operand, theinstructions are normally taken from the memory insequential order. If one instruction comes from acertain location, such as X, the next instruction isusually taken from location X + 1. However, theexecution of a logic instruction may produce a resultthat dictates that the next instruction is to be takenfrom an address as specified in a portion of the logicinstruction. For example, the logic instruction mayinitiate certain operations in the computer todetermine if the content of a given register in thearithmetic section is negative. If the answer is yes,the location of the next instruction is specified in anaddress section of the logic instruction. If the answeris no, the next instruction would be taken from thenext sequential location in the memory.Every computer provides circuitry for a variety oflogic instructions, thus providing the capability ofselecting alternate instruction sequences if certaindesirable or undesirable conditions exist. The abilityto branch at key points is the special feature of thecomputer that makes it able to perform such diversetasks as missile control, accounting, and tactical airplotting.ARITHMETIC-LOGIC UNITThe arithmetic-logic unit (ALU) is the section inwhich arithmetic and logic operations are performedon the input or stored data. The operations performedin this unit include adding, subtracting, multiplying,dividing, counting, shifting, complementing, andcomparing.Generally, information delivered to the controlunit represents instructions, while information routedto the arithmetic unit represents data. Frequently, it isnecessary to modify an instruction. This instructionmay have been used in one form in one step of theprogram, but must be altered for a subsequent step. Insuch cases, the instruction is delivered to thearithmetic unit where it is altered by addition to orsubtraction from another number in the accumulator.The resultant modified instruction is again stored inthe memory unit for use later in the program.All arithmetic operations can be reduced to one offour processes: addition, subtraction, multiplication,or division. In most computers, multiplicationinvolves a series of additions, and division is a seriesof subtractions.The arithmetic unit contains several registers.Each register is a unit that can store one “word” ofcomputer data. These registers generally include theD, X, and Q register, and a unit called the accumulator(A register). The registers are so named foridentification purposes only. During an arithmeticprocess, the D, X, and Q registers temporarily hold orstore the numbers being used in the operation. Thesenumbers are called the operands. The accumulatorstores the result of the operation. The control unitinstructs the arithmetic unit to perform the specifiedarithmetic operation as requested by the program.The control unit transfers the necessary informationinto the D, X, and Q registers from memory andcontrols the storage of the results in the accumulatoror in some specific location in memory.The arithmetic unit also makes comparisons andproduces yes or no or GO/NO-GO outputs as a result.The computer can be programmed so that ayes or GOresult causes the computer to perform the next step inthe program, while a no or NO-GO result causes thecomputer to jump several steps in the program. Acomputer can also be programmed so that a no resultat a certain point in the program will cause thecomputer to stop and await instructions from akeyboard or other input device.INTERNAL DATA STORAGE UNITIn some digital computers, the internal datastorage unit, or memory section, is constructed ofsmall, magnetic cores, each capable of representinganon or off condition. An on condition is representedby a 1 and an off condition is represented by a 0. Asystem of these cores arranged in a matrix can storeany computer word that is represented in binary form.All computers must contain facilities to storecomputer words or instructions until theseinstructions or words are needed in the performanceof the computer calculations. Before thestored-program type of computer can begin to operateon its input data, it is first necessary to store, inmemory, a sequence of instructions and all numbers8-5
and other data that are to be used in the calculations.The process by which these instructions and data areread into the computer is called loading.The first step in loading instructions and data intoa computer is to manually place enough instructionsinto memory by using the console or keyboard. Theseinstructions are then used to bring in moreinstructions as desired. In this manner, a fewinstructions are used to “bootstrap” more instructions.Some computers use an auxiliary (wired) memory,which permanently stores the bootstrap program,thereby making the manual loading unnecessary.These instructions may be stored in chips. Thesechips are referred to as “read only memories” orROMs.The memory section of a computer is essentiallyan electronically operated file cabinet. It is actually alarge number of storage locations. There aregenerally between 1 and 40,000 locations. Each oneis referred to as a storage address or register. Everycomputer word that is read into the computer duringthe loading process is stored or filed in a specificstorage address and is almost instantly accessible.The types of memory storage devices used mostfrequently in present-day computer technology aremagnetic cores, semiconductor, thin film, magneticdrum, magnetic tape, and magnetic disks.Magnetic Coresgenerated by the shifting of core from 1 to 0 in aREAD cycle.Since a single core stores only one bit of a word,a large number of cores are required to handle all thebits in every word to be stored. These cores arearranged in arrays to assign memory address locationsand quickly write data and locate data for read-outpurposes. The technique used most frequently forwriting and reading data in magnetic core arrays isknown as the coincident-current technique.In computer memory applications, the ferrite coreis magnetized by a flux field produced when a currentflows in a wire (drive line) that is threaded throughthe core. The core retains a large amount of this fluxwhen the current is removed. Flux lines can beestablished clockwise or counterclockwise around thecore, depending on the direction of the magnetizingcurrent. A current in one direction establishes amagnetization in a given direction. Reversing thedirection of the current flow reverses the direction ofthe flux field and the core magnetization. These twounique states represents 0 and 1, respectively.Semiconductor MemoriesSemiconductor memories are used in manymodern computers. Most of the semiconductormemories are of the MOS LSI type, which may beOne of the methods for storing internal data in acomputer is realized by using magnetic cores. Coresare generally constructed by two methods. The firsttype of core, called a tape wound core, is fabricatedby wrapping a tape of magnetic material around anonmagnetic toroidal form. A toroid is a term used todescribe a doughnut-shaped solid object. The secondtype of core is called a ferrite core, and it is made bymolding finely ground ferrite into a toroidal form.The ferrite used in this application is a ceramic ironoxide possessing magnetic properties. The ferriteparticles are then heat-fused or “sintered” by theapplication of heat and pressure.In magnetic core memories, each data bit is storedin the magnetic field of a small, ring-shaped magneticcore (fig. 8-2). Magnetic cores generally have fourwires running through them. Two wires are used forREAD selection. These same two wires are used forWRITE by reversing the direction of current flow. Aninhibit wire prevents writing a 1 when a 0 is towritten. The sense wire picks up the signal voltageFigure 8-2.-Magnetic core showing X, Y, inhibit, and senselines.8-6
static or dynamic. MOS means metal oxidesemiconductor, and LSI means large scale integration.Thin FilmThin film memory consists of Permalloy, aferromagnetic material, deposited on a supportingmaterial (substrate) of thin glass. This is done undercontrolled conditions in a vacuum chamber. When allair has been removed from the chamber, a shutterarrangement is opened, and vapors from moltenPermalloy pass through a mask and are deposited onthe supporting material. The pattern thus formed isdetermined by the shape of the mask. The thicknessof each spot (magnetized area) is controlled by theamount of time the shutter is open.A magnetic field is applied parallel to the surfaceof the substrate during deposition. The film spotsbecome easier to magnetize in the direction parallel tothat in which the magnetic field was applied duringthe deposition process. This direction is known as thepreferred direction; likewise, the axis of thismagnetism is called the preferred axis.Magnetic DrumsThe magnetic drum storage device is a cylinderthat rotates at a constant velocity. Information iswritten on or read from the drum when its magneticsurface passes under magnetic heads, which aresimilar to the magnetic heads found on commercialtape recorders.Magnetic drums provide a relatively inexpensivemethod of storing large amounts of data. A magneticdrum (fig. 8-3) is made from either a hollow cylinder(thus the name drum) or a solid cylinder. The cylindermay consist entirely of a magnetic alloy, or it mayhave such an alloy plated upon its surface. Manydrums are made by spraying on magnetite, an ironoxide. The surface is then coated with a thin coat oflacquer, and buffed.subdivided into cells, each of which can store onebinary bit. All the cells that are positioned under theheads of a multitrack drum at the same time are calleda “slot.” With some drums, each head reads or writesone bit of a word. Thus, when a word is written intoor read from a slot, each track contains one bit of thatword. The number of heads used depends on the sizeof the word that the computer is designed to handle.One of the tracks provides timing signals for thedrum rotation. The timing track determines thelocation of each set of storage cells around the drum.Each timing signal denotes a unit of time of drumrotation. For example, if the timing track is 80 incheslong and timing signals are recorded at 120 pulses perinch, there are 9,600 locations for bit storage on thetrack. If the drum has 32 tracks in addition to thetiming track, the drum has the capacity to store a totalof 307,200 bits.Some drums use two or even three timing tracks.The timing tracks are used for synchronizationpurposes and are sometimes called “control” or“clock” tracks. The timing pulses establish the timescale to which all circuits through the computer aresynchronized.The retrieval of data from a rotating drum can bea rather involved process, as can be realized bydrawing a comparison to the core memory of acomputer. When core memory is used, all the data isstored in the cores in a static condition. The data canbe located at a given place at any instant, and can beeasily read from that location in serial or parallel formRepresentative drums have diameters rangingfrom 12.7 to 50.8 centimeters (about 5 to 20 inchesrespectively). The surface of the drum is divided intotracks or channels that encircle the drum. A numberof READ and WRITE heads are used for recordingand reading. There is at least one head per track. Thedrum is rotated so that the heads are near, but nottouching, the drum surface at all times.As the drum rotates, the tracks are continuouslypassing under their respective head. Each track isFigure 8-3.-Magnetic drum.8-7
to represent the same data that was stored in thatlocation.Transfer of the data from constantly rotatingmagnetic drums, on the other hand, is complicated.Timing pulses are not used to synchronize the drumspeed, which may vary slightly from time to time.Thus, some method must be used to ensure that dataread into the drum memory in a given bit position willbe read from the memory with the same timereference. The probability y of an incompatible timerelationship between the drum speed andsynchronizing pulses makes it necessary to establishsome means of compensating for variations in drumspeeds.In practice, the drum contains a control point anda number of sectors in a specific format. The controlpoint is a magnetic mark that specifies a startinglocation on the drum. All data stored on the drum isreferenced to this indexing point or reference pulse, asshown in figure 8-3.Magnetic TapesMagnetic tape is widely used as a storage mediumfor large amounts of data, or it may be used as a mainstorage backup. However, it is normally not used asan internal (main) storage medium because of its longaccess time. This is readily realized if you considerthat needed information is widely, and sometimesrandomly, distributed along the tape. Magnetic tapehas two main advantages—its large storage capacityand its low cost.Magnetic DisksThe magnetic disk is a convenient medium forsemipermanent storage of mass volumes ofproduction programs. For many applications, disksFigure 8-4.-Circular data track.8-8
positioned, and the data is read serially from thesurface of the selected disk.The basic unit of information on the disk is calleda character. By design, each character contains agiven number of bits for fixed-word applications.One or more of these characters in a group form arecord. A circular data track (fig. 8-4) consists of oneor more records, associated record addressees, gaps,and data track identification. A number of data tracksaligned on vertically arranged disks (fig. 8-5) form acylinder of information. A magnetic disk file systemmay contain one or more bands (modules). Eachmodule contains a specified number of disks withtheir associated cylinders and data tracks. The flowchart in figure 8-6 illustrates the procedures necessaryto retrieve or store information.Figure 8-5.-Data storage disk assembly.are superior to magnetic tapes for rapid acquisitionand storage of mass volumes of system programs anddata.Magnetic disks resemble phonograph records thathave been coated with iron oxide. The disks arearranged in stacks in much the same way as a recordstack in a jukebox. All the disks are continuouslyrevolving and spaced apart so that a record headdriven by an access mechanism can be positionedbetween the disks.Data is recorded at a certain address on aspecified disk. When readout of a particular bit ofdata is desired, the recording head is automaticallyINPUT/OUTPUT (I/O) SECTIONLearning Objective: Describe how a digitalcomputer communicates with externalperipheral devices.The I/O section is that portion of the digitalcomputer through which the CPU communicates withthe external peripheral devices. In a useful computerfunction, data is read into the computer, processed,and then transferred to the output. The peripheralunits handle the data input and output displayfunctions. The I/O section controls the transfer ofdata between the computer and the peripherals.The I/O section is the interface between thecomputer and any extenal devices. An interface is anassembly of electronic circuits that make thecomputer compatible with the peripheral units. ThisFigure 8-6.-Flow chart for storage and retrieval of data from disks.8-9
compatibility permits the computer and the peripheralunits to communicate intelligently. The compatibilityinvolves logic levels, timing or speed, and control.When digital data is transmitted between twounits, the binary voltage or current levels must becompatible. Logic-level conversion is often requiredto properly interface different types of logic circuits.For example, logic-level shifting is often required toproperly interface bipolar and MOS circuits. Thespeed of the data transmission must also becompatible. Some type of temporary storage betweenthe two units may be required as a buffer to match thehigh-speed CPU to a low-speed peripheral unit.Control is another function of the interface.There are status lines that tell when the computer orperipheral unit is ready or busy, and strobe lines thatactually initiate the data transfers. This process isoften referred to as “handshaking.”The type of information exchanged between theI/O unit and the peripheral devices includes data,addressing, and control signals. Since multiple I/Ounits can usually be connected to a computer, somecoding scheme is required to select the desired unit.This is usually done with a binary word used as anaddress. The address is transmitted to all theperipheral devices. The unit recognizing the addressis connected to the I/O section. Data can then betransmitted to or from the device over theinterconnecting data lines. The actual data transfersare controlled by control signals between the twodevices.Programmed data transfers that take place as theresult of executing an I/O instruction usually causethe data to be transferred between the peripheral unitand the accumulator register in the CPU. Other CPUregisters may also be used, depending upon thecomputer architecture and the instruction. In somecomputers, peripheral units are addressed as storagelocations, and all memory reference instructions canbe used in performing I/O operations. No special I/Oinstructions are used in these computers.PARALLEL VERSUS SERIAL DATATRANSMISSIONSThere are two methods of transmitting digitaldata. These methods are parallel and serialtransmissions. In parallel data transmission, all bitsof the binary data are transmitted simultaneously. Forexample, to transmit an 8-bit binary number inparallel from one unit to another, eight transmissionlines are required. Each bit requires its own separatedata path. All bits of a word are transmitted at thesame time. This method of transmission can move asignificant amount of data in a given period of time.Its disadvantage is the large number ofinterconnecting cables between the two units. Forlarge binary words, cabling becomes complex andexpensive. This is particularly true if the distancebetween the two units is great. Long multiwire cablesare not only expensive, but also require specialinterfacing to minimize noise and distortionproblems.Serial data transmission is the process oftransmitting binary words a bit at a time. Since thebits time-share the transmission medium, only oneinterconnecting lead is required.While serial data transmission is much simplerand less expensive because of the use of a singleinterconnecting line, it is a very slow method of datatransmission. Serial data transmission is useful insystems where high speed is not a requirement. Serialdata transmission techniques are widely used intransmitting data between a computer and itsperipheral units. While the computer operates at veryhigh speeds, most peripheral units are slow because oftheir electromechanical nature. Slower serial datatransmission is more compatible with such devices.Since the speed of serial transmission is more thanadequate in such units, the advantages of low cost andsimplicity of the signal interconnecting line can beobtained.PARALLEL DATA TRANSMISSIONIn a parallel data transmission system, each bit ofthe binary word to be transmitted must have its owndata path. There are a variety of ways to implementthis data path. The two basic classifications oftransmission line circuits are single-ended andbalanced. Single-ended transmission systems use asingle-wire data path for each bit. When combinedwith a ground or return reference, the electrical circuitbetween the sending circuit and the receiving circuitis complete. In a balanced transmission line system,two conductor cables are used to send the data. Thedata on the dual-transmission line is complementary.The dual-transmission lines also use a ground returnreference. While a single-ended transmission line issimpler and less expensive, it is subject to more noiseproblems than the balanced or dual-transmission linesystem.8-10
SERIAL DATA TRANSMISSIONThe simplest, most economical, and easiest to usemethod of transferring digital information from onepoint to another is serial data transmission. In a serialsystem, the digital data is sent one bit at a time. Thismeans only one pair of transmission wires is required.The serial transmission of data is far slower thanparallel transmission. In most computer systems, thelow speed is not a disadvantage. Data ratesachievable in serial data systems are sufficiently highto make them very practical.Serial data transmission is preferred because it isinexpensive. It is especially beneficial in transferringdata over long distances. For long distances, you cansee that multiple parallel lines are far more expensivethan a single cable.Low-speed serial data transmission also offersanother benefit. The data rate is slow enough topermit the transmission of data over telephone lines.In this case the digital data is converted into a pair ofaudio tones representing binary 1s and 0s. These canbe transmitted economically for long distances overstandard telephone lines. In addition, low cost taperecorders can be used to record the serial data. Thisprovides a low cost means of mass data storage andretrieval. Standard audio cassette recorders arewidely used in this application.Serial data transmission also permits transmissionof data by radio. A radio communications pathrepresents only a single interconnecting link similarto a transmission line pair. Therefore, for data to betransmitted by radio, it must be in serial format.Serial digital data is used to modulate a radio carrierin various ways.In digital computer systems, you will find thatboth serial and parallel data transmission methods areused. Where high speeds and short distances arerequired, the parallel method is used. The serialmethod is used where low cost, simplicity, low speed,and long distances are necessary.INPUT/OUTPUT (I/O) DEVICESI/O devices are similar in operation but performopposite functions. It is through the use of thesedevices that the computer can communicate withdevices external to the computer itself (peripheraldevices).The I/O section of a computer provides thenecessary lines of communication and generates suchsignals necessary for the computer to communicatewith, and when necessary, control the operation of theI/O devices. The I/O section, once it has beeninitiated by the control section, usually operatesindependently of the control section, except when itmust time-share memory with the control section.Input DevicesInput data may be in any one of three forms:. Manual inputs from a man-machine interface(MMI), such as a keyboard or console. Analog and/or digital inputs from instrumentsor sensorsl Inputs from a source on or in which data hasbeen previously stored in a form intelligible to thecomputerComputers can process hundreds of thousands ofcomputer words per second. Thus, a study of the firstmethod (manual input) reflects the inability ofhuman-operated keyboards or keypunches to supplydata at a speed that matches the speed of digitalcomputers. A high average speed for keyboardoperation is two or three characters per second. Thisactually translates to a data input rate of less than onecomputer word per second due to coding time. Sincethe computer can read several thousand times thisamount of information per second, it is clear thatmanual inputs should be minimized to make moreefficient use of computer time.Instruments used as input sensors are capable ofsupplying several thousand samples regardingpressure, temperature, speed, and other measurementsper second. This is equivalent to 10,000 to 20,000bits or binary digits per second. Digital computersthat use these devices must be equipped withanalog-to-digital (A/D) converters (assuming theinput is in an analog format) to convert physicalchange to specific increments.Input data that has been previously recorded onpunched cards, perforated tapes, magnetic tapes, ormagnetic drums or disks in a form understood by theprogram may also be entered into the computer. Thismethod is much faster than entering data manuallyfrom a keyboard. The most commonly used inputdevices in this category are magnetic tape readers andpaper tape (perforated tape) readers.One of the main features of computers is theirability to process large amounts of data quickly. In8-11
most cases, the processing speed far exceeds theability of input devices to supply information. Onecommon limitation of most input devices is that eachinvolves some mechanical operation. For example,the movement of a tape drive or card feeder. Becausea mechanical movement of some part of these devicescannot take place fast enough to match electronicspeeds with the computer, these input devices limitthe speed of operation of the associated computer.This is particularly evident in cases where successiveoperations are dependent upon the receipt of new datafrom the input medium.Several methods of speeding up mechanicaloperation have been devised, all of which aredesigned to move a smaller mass a shorter distanceand with greater driving force. Many of these designshave been directed toward increasing the drive speedof magnetic tapes. For example, present-day tapedrives can pass up to 400 inches of tape per second ofa tape reading head. Card readers can read up to2,000 cards per minute. Present-day disk systemsoperate at speeds up to 3,600 RPM.The comparative rates of data for these systemsare as follows:. Card systems—2,700 characters per second. Tape systems—350,000 characters per second. Disk systems—15,000,000 characters persecondAnother method of entering data into a computer,which we have not previously mentioned, is to linktwo or more computers together and program them tocommunicate with each other. This is perhaps thefastest method of entering or extracting data from acomputer. An example of this method is the data link.Output DevicesOutput information is also made available in threeforms:. Displayed information, such as codes orsymbols presented on a monitor screen, that is used bythe operator to answer questions or make decisions.. Control signals, which is information thatoperates a control device, such as a lever, aileron, oractuator.. Recordings, which is information stored in amachine language or human language on tapes orprinted media.Devices that store or read output informationinclude magnetic tapes, punched cards, punchedpaper tapes, monitors, electric typewriters, andhigh-speed printers.INTEGRATED CIRCUIT (IC)TECHNOLOGYLearning Objective: Identify integratedcircuit classifications and various types ofintegrated circuits.Modern digital computers are made with ICs. ICsprovide the most economical and practical method ofimplementing the circuits required to carry out thefunctions of a digital computer.IC CLASSIFICATIONSICs fall into four basic levels of complexity.These are small scale integration (SSI), medium scaleintegration (MSI), large scale integration (LSI), andvery large scale integration (VLSI). The designationsdefine the size and complexity of individual ICs.Small Scale Integration (SSI)SSI circuits contain very little circuitry, generallyfewer than 10 circuits no more complex than a typicallogic gate. Typical SSI circuits include multiple logicgates, flip-flops, and simple combinational logiccircuits.Medium Scale Integration (MSI)MSI circuits are more complex and sophisticatedthan SSI circuits. Most MSI circuits contain 12 ormore circuits equivalent in complexity to a typicallogic gate. MSI circuits are functional in nature inthat the y perform a specific logic operation with nofurther interconnection. Typical MSI circuits includecounters, shift registers, arithmetic-logic circuits,decoders, multiplexer, and other combinational andsequential logic circuits. MSI circuits are highlybeneficial because they significantly cut design time.They also reduce the number of ICs in design,minimize circuit wiring, and reduce size and powerconsumption. Most digital equipment can be8-12
implemented by simply combining the proper MSIcircuits.Large Scale Integration (LSI)LSI circuits are large and complex, and generallycontain circuitry equivalent to 100 or more typicallogic gates. LSI circuits are also functional in nature.Typical LSI ICs include memories andmicroprocessors.Very Large Scale Integration (VLSI)VLSI circuits are large, complex circuits thatcontain the equivalent of 1,000 or more logic gates.Early digital computers use a mix of SSI MSI,and LSI circuits. Over the years, the trend has beentoward the greater use of MSI, LSI, and VLSI circuits.Today, most computers are predominately MSI, LSI,and VLSI circuits. The SSI circuits are used only ininterfacing the other three larger and moresophisticated types.DIGITAL CIRCUIT CHARACTERISTICSMany factors influence the choice of logiccircuits used to implement a digital computer. Themost important of these are speed, power dissipation,and the availability of MSI, LSI, and VLSI circuits.Other factors include the cost, noise immunity, andinterface capabilities.The most important choice of a type of logicinvolves speed and power dissipation. Speed refers tothe frequency of operation or propagation delay of thelogic circuits. The higher the speed of operation, thegreater the amount of data that can be processed in agiven time. Therefore, computer designers try toachieve as much speed as possible in their designs.Many high-speed circuits and techniques areavailable. Besides choosing circuits with lowpropagation delay times, circuit reduction techniquesare used to minimize propagation delay throughproper physical layout as well as logic simplification.However, speed is always obtained at the expense ofincreased power dissipation and cost. Invariably, thedesigner faces a speed-power tradeoff, and attemptsto optimize the design for maximum speed withinrealistic power consumption and cost guidelines.Choosing ICs for use in a digital computerinvolves not only choosing a specific logic family, butalso in choosing the correct mix of the various ICtechnologies available. By being flexible in thecircuit choice of mix, a designer can more easilyoptimize the design. This means freely mixingdifferent families of bipolar and MOS, as well asVLSI, LSI, MSI, and SSI circuits.For a detailed look at bipolar and MOS theory, aswell as more information on VLSI, LSI, MSI, and SSIcircuits, refer to <strong>Aviation</strong> <strong>Electronics</strong> <strong>Technician</strong> 2(Intermediate), NAVEDTRA 12334, chapter 2.PROGRAMMING FUNDAMENTALSLearning Objective: Recognize concepts andprocedures used in the construction of acomputer program.Computer programming is the process ofplanning a solution to a problem. You can derive ageneral outline for calculating total resistance of aparallel resistance circuit by using the followingsteps:1. Take the reciprocal of the resistance in ohmsof all resistors in a circuit.2. Calculate the sum of the values from step 1.3. Compute the reciprocal of the value fromstep 2.The process of preparing a program from thisexplanation is not difficult. One basic charcteristicof the computer must be considered-it cannot think.It can only follow certain commands, which must becorrectly expressed and must cover all possibilities.If a program is to be useful, it must be broken downinto specifically defined operations or steps. Theseoperations or steps, along with other data, must becommunicated to the computer in a language that itcan understand.NOTE: The instructions are readsequentially unless otherwise stated.Generally, the steps that a computer follows in theexecution of a program are as follows:1. Locates parameters (constants) and such dataas necessary for problem solving2. Transfers the parameter and data to the pointof manipulation3. Performs the manipulation according tocertain rules of logic8-13
4. Stores the results of manipulation in a specificlocation5. Provides the user with an useful outputEven with a simple program, such as theresistance program, each step must be broken downinto a series of machine operations. Theseinstructions, along with the parameters and data, mustbe translated into a language or code that thecomputer can understand.Programming is a complex problem that mayinvolve writing a large number of instructions. It mayalso involve keeping track of a great many memorycells that are used for instruction and data storage,which is time-consuming and can lead to errors.To reduce time and the possibility of errors forcomplex program preparation, the compiler has beendeveloped. The compiler is a program that takescertain commands and then writes, in a form themachine understands, the instructions necessary for acomputer to execute these commands. Compilers canbring many instructions into the final program whencalled upon or signaled by a single source statement.The compiler is problem oriented because theoperations produced are those needed to work theproblem as set out by the problem statement.Compilers are built at various levels or degrees ofcomplexity. The simplest form of compiler takes onemnemonic phrase and writes one machine instruction.A mnemonic code is an abbreviated term describingsomething to assist the human memory. For example,to shift the contents of the A-register right nine places,the mnemonic code RSH.A9 is used. This causes thecompiler to write an instruction that shifts thecontents of the A-register right 11 8places. Acompiler written on this level is commonly called anassembler. Note the advantages as follows:1. No opportunity to use the wrong function code2. No necessity to convert the shift count to octalA more sophisticated compiler may take astatement, such as “multiply principal by rate,” andgenerate all the instructions necessary for thecomputer to do the following:1. Locate the factors involved (in this case theprincipal and rate)2. Transfer these factors to the arithmetic unit3. Perform the indicated arithmetic operation (inthis case multiplication)4. Store the resultant (which, in this case, will bethe interest or the principal)The compiler also keeps track of all memoryallocations, whether being used for data orinstructions.Depending on the complexity of the problem to besolved, programs may vary in length from a fewinstructions to many thousands of instructions.Ultimately, the program could occupy a significant,perhaps even an excessive, portion of computermemory. One method used to preclude thispossibility is to segment the program, storing seldomused portions in auxiliary storage, and reading theseportions into the main memory only when they arerequired. An important method of developing thisability is through the use of subroutines.SUBROUTINESAs a program grows larger, certain functions mustbe repeated. The instructions necessary to performeach of these repeated functions are grouped togetherto form subroutines. These subroutines may then bereferenced by a relatively few instructions in the mainprogram. This eliminates repeating certain groups ofinstructions throughout the program.EXECUTIVE ROUTINESThe instructions that control access to the varioussubroutines are called the executive routine of themain program. Depending upon the complexity ofthe program, there may also be subexecutive routineswithin the executive routines.Housekeeping is a term used frequently withsubroutines. At the time of entry into a subroutine,the contents of the various addressable registers mayor may not be of value. An addressable register isdefined as any register whose contents can be alteredunder program control. The programmer must takesteps to preserve the contents of these registers unlessthey are of no value.JUMP AND RETURN JUMPINSTRUCTIONSThe jump and return jump instructions are used toassist in the construction of executive routines. Theseinstructions provide the computer with the ability toleave the sequential execution of the main program,execute any of the subroutines, and then return to themain program.8-14
Execution of a return jump instruction causes theaddress of the next instruction to be executed in themain program to be stored (usually in the entry cell ofthe subroutine). It then causes the instruction of thesecond cell of the subroutine to be executed. The lastinstruction to be executed will usually be a straightjump to the address contained in the entry cell. Sincea jump instruction specifies the address of the nextinstruction to be executed, the computer is providedwith a means of returning to the main program oncethe subroutine has been executed.PROGRAM CONSTRUCTIONllllllllProgrammer’s nameDateMemory area used and/or number of cells usedRegisters usedI/O devices requiredFlow diagram(s)Hard copy (program listings, especially alisting of the coded instructions)Program tapesThe process of writing a program is broken downinto six basic steps.1. Statement. A statement forms a clear comprehensivestatement of the problem.2. Analysis. Analysis consists of laying out theproblem in a form that will lend itself to arithmeticaland/or logical analysis, determining what logicaldecision must be made, and if data manipulation isrequired.3. Flow diagram. A flow diagram, or chart, is anexpansion of the steps in which special symbols areused to represent the various operations to beperformed and the sequence in which they are to fall.4. Encoding. The process of converting theoperations listed in the flow chart into language thecomputer will use, either machine instructions, words,or compiler statements.5. Debugging. The process of locating errors inthe program is called “debugging.” Varioustechniques are available for this purpose. A programmay be written to include some aids for itself, or aseparate debugging program may be run to test theoperation of a malfunctioning program. For a simpleprogram, a trial solution may be done on paper, andthe computed results compared with those actuallyobtained at each step.6. Documentation. Documentation is veryimportant because later changes may be warranted ina program, or it may be desirable to use subroutinesfrom another program. Proper documentation willensure that this can be accomplished. Documentationshould include the following:l Program title. Problem statementFLOW CHARTINGThe programmer constructs a program “map” indetermining a solution to a problem. This map iscommonly called a flow chart and serves a multitudeof important functions. The flow chart maps thelogical steps required, decisions to be reached, andpaths to be followed as a result of the decisions.When properly annotated, it defines input/outputrequirements, address allocations, data accuracyconsiderations, and register usage. A flow chart isvaluable when debugging a program and whenmaking future changes.Flow charting can be constructed at various levelsof complexity. A high-level flow chart consists of afew symbols and presents a broad overview of theproblem. A low-level flow chart may approach aone-to-one correspondence between flow chartsymbol and program instruction. Usually, there willbe several flow charts for a program area. These maybe compared to the prints found in a maintenancemanual. These prints include a block diagram toshow the relationship of major units (high-level),functional block diagrams showing the major circuitsin a unit (intermediate-level), and the schematics ofthe circuits (low-level). Flow charts should beat sucha level that they will implement all the usespreviously discussed.MAINTENANCE PROGRAMSAs we have previously stated, a routine orprogram is a series of instructions that control theoperations of a computer. Each instruction is used tocause some action that is part of the overall task thecomputer must perform. Therefore, an instructionmay be considered as the basic building block of acomputer program.8-15
An overall check of a computer can be done bythe use of a maintenance program. The maintenanceprogram provides a thorough and rapid method for thedetection of failures in a specific portion of thecomputer. This type of overall maintenance check isflexible and efficient. The programs may use thesame type of tape, memory, computing, and externalstorage media as operational programs. Themaintenance program can be altered when thecomputer or auxiliary components are changed. Theprogram can also be constantly improved. Generally,no extra test equipment is required since the computercircuits are used to perform the test. Testing by meansof maintenance programs results in the computercircuits being used in a more comprehensive mannerthan during normal program execution. When aprogram has been checked and accepted as a goodmaintenance tool, it is not subject to deterioration. Incontrast, test equipment may be checked and acceptedonly to become unreliable shortly after being placedin use.Maintenance programs are divided into two mainclasses: reliability and diagnostic. Maintenanceprograms that are used to detect the existence oferrors are called reliability programs. Reliabilityprograms should be arranged to check as manycomputer circuits as possible.Maintenance programs that are used to locate thecircuits in which computer malfunctions originate arecalled diagnostic programs. An effective diagnosticprogram should locate the source of trouble as closelyas possible. Actually, in many cases, reliabilityprograms have some diagnostic features, just asdiagnostic programs have some reliability features.For convenience, a program is called either areliability or diagnostic program, depending on itsintended emphasis. In general, programs that checkrather than diagnose are shorter and simpler.PERIPHERAL AVIONICS SYSTEMSLearning Objective: Identify peripheralavionics systems and describe theirinteraction with the computer.The aircraft computer is considered the mostimportant avionics system in achieving the mission ofthe aircraft. However, the success of the computerdepends upon its external sensors or other avionicssystems. The quality of data fed to the computerdetermines the quality of data fed out of the computer.The following avionics systems provide inputs to andreceive outputs from the computer: navigation, radar,ordnance/weapons, and data link. These are only afew of the major aircraft avionics systems thatinterface with the airborne computer.NAVIGATIONNavigation systems are designed to tell pilotswhere they are, where they have been, and where theyare going. The TACAN/DME system providesknown station reference points, while an inertialnavigation system provides continuous updating ofsuch information as latitude and longitude. Thisinformation is fed to the computer where it iscompared, updated, and sent out to other systems.SEARCH/TRACK RADARA search radar system is designed to give visualindications of what is around the aircraft. Some of thepresent-day aircraft have a 150-mile or greater range.Depending upon the size and/or speed of the radarindications, a computer can determine whether thetarget is stationary or moving, a land mass or anaircraft, friendly or unfriendly, and many other itemsof information. If a target is determined to beunfriendly, a tracking radar can be used to tell thepilot what to do to eliminate the target.ORDNANCE/WEAPONSThe design characteristics and ballistics of themany types of ordnance, weapons, and missilesrequire the use of a computer to store the information.The airborne computer aids the pilot by tellinghim/her when to release the weapons. The computergreatly increases the pilot’s chances of destroyingdesignated targets.DATA LINKCombat aircraft have to have the most up-to-dateinformation available to successfully completecombat missions. On an aircraft carrier, the combatinformation center, CIC, is normally in constantcontact with an airborne CIC. The airborne CIC isusually an E-2 or P-3 aircraft. These two CICs willcrosstalk by use of the data link system. Basically,data link involves a series of transmitted pulses thatrepresent information. The pulsed information is sentto the computers of all combat aircraft to enhancetheir chances of success.8-16
REVIEW QUESTIONSQ1. What are some examples of computerhardware?Q2. True or False. An analog computer designedto measure fuel quantity can be used tomeasure elapsed time in flight?Q2. In a digital compute, how are some of thenumerical equivalents expressed?Q4. What are the three basic units of a centralprocessor?Q5. What is the most frequently used technique forwriting and reading data in a magnetic corearray memory?Q6. Representative magnetic drums havediameters in what size range?Q7. What method of inputting or outputting datais considered the fastest?Q8. Computer designers must face a tradeoffbetween what two choices when using ICs?Q9. What method is used to preclude thepossibility of a computer program from usingan excessive amount of memory?Q10. What are the six steps of writing a computerprogram?8-17
CHAPTER 9AUTOMATIC CARRIER LANDING SYSTEMThe most demanding task facing a pilot is thelanding of the aircraft on an aircraft carrier in roughseas. Landing an aircraft on a stationary land airstripis hard enough. Add to that task the motion of thecarrier in the water, the wave action, and the vortex ofair caused by the island, and you can see the problemsfacing the pilot.With the electronic technology of today, thecarrier landing is made easier for the pilot. Theautomatic carrier landing system (ACLS) is a greataid to the pilot. This system, once engaged, providesthe aircraft with the following capabilities:Data link roll commands are used to interceptand lock onto the landing pattern.Data link pitch commands establish the properglide path.The autopilot provides warnings if theautomatic carrier landing mode becomesuncoupled or is degraded.This system does not guarantee a perfect landing,nothing can do that. What this system does do is toensure that the pilot and aircraft have the best andsafest possible approach and descent to the carrierdeck and touchdown.AUTOMATIC CARRIER LANDINGSYSTEM COMPONENTSLearning Objective: Recognize systems,subsystems, and components used in theautomatic carrier landing system.Although this system is used on the aircraft, someof the subsystems are located on the aircraft carrier.There is no ACLS “box” on the aircraft. This systemuses parts of other systems already onboard theaircraft. Figure 9-1 shows how the ACLS componentsinterface and the signal data.AUTOMATIC FLIGHT CONTROLSYSTEM AN/ASW-42The automatic flight control system (AFCS orautopilot) is located on the aircraft. This systemprovides the interface between the data link and theaircraft flight control surfaces. It is the system thepilot uses to select ACLS. The AFCS providesswitching and signal conditioning, engage logic,command signal limiting, and failsafe interlocks. Thefailsafe interlocks are required to couple and processdata link signals to the pitch and bank channels of theAFCS. Automatic synchronization is provided in allthree axes.DIGITAL DATA COMMUNICATION SETAN/ASW-25BThe digital data communication set (DDCS)receives the data link messages and signals, screensout invalid messages, and then sends the signals to theAFCS. The DDCS is located in the aircraft.RECEIVING-DECODING GROUPAN/ARA-63The receiving-decoding group (R-DG)determines the glide-path errors from the carrier’sinstrument landing system radar. It also converts thedata into signals for the pilot’s flight path crosspointers. The R-DG is used for airborne monitoringof Mode I approaches and for Mode II. All threemodes (Mode I, Mode II, and Mode III) will bediscussed later in this chapter.INSTRUMENT LANDING SYSTEMAN/SPN-41The instrument landing system (ILS radar)transmits the glide path pulse-coded Ku-bandinformation from the carrier to the aircraft. Thissystem is located on the carrier and uses two antennas.One antenna is used to transmit azimuth information,and the other transmits elevation information. Bothsignals are processed by the R-DG on the aircraft.9-1
LANDING CONTROL CENTRAL SYSTEMAN/SPN-42subsystems included insubsystems are as follows:this system. TheseThe landing control central system (tracking andcomparison radar) (LCCS) transmits Ka-band signalsfrom the carrier to the aircraft. The LCCS uses aconical scan antenna. This radar system tracksaircraft, and compares the aircraft position to thedesired glide path. There are five shipboard1. Tracking pulse radar set (Ka band). This radarset locks on aircraft when the aircraft enters theacquisition gate. The system then tracks the aircraftin range, azimuth, and elevation until touchdown orwaveoff.2. Stabilization group. This group translates theactual radar-derived position vector of the aircraft to aFigure 9-1.-Simplified block diagram of the ACLS system.9-2
stabilized deck-coordinated system referenced to thetouchdown point on the flight deck.3. Digital computer. This is a general-purposecomputer used to provide functions for radar datastabilization, data filtering, and computationsrequired for control of the aircraft.4. Data link monitor. This subsystem continuouslychecks data link transmissions for errors. Ifthe messages do no check properly, the monitor willswitch the system to either Mode II or Mode III, orwill generate a waveoff signal.5. Control console. This console monitors andcontrols the various functions of the landing system.RADAR BEACON AN/APN-154BThe radar beacon is located on the aircraft and isused to receive the Ka-band signal interrogationsfrom the LCC radar. The radar beacon then transmitsX-band replies to the carrier to provide preciseaircraft position data.APPROACH POWER COMPENSATORAN/ASN-54The approach power compensator (APC)automatically adjusts throttles to maintain theangle-of-attack, and thus, the airspeed during aircraftlanding approach. It can be used for all carrierlandings and is required for Mode I approaches. ForMode II and Mode III approaches, the APC isoptional. Data from the angle-of-attack transducer,normal accelerometer, and the stick/stabilizer positionare used to control an electromechanical servoactuator. This servo actuator is coupled to the throttlelinkage on the engine fuel control.ATTITUDE REFERENCE INDICATORID-1791/AThe ID- 1791/A (VGI) is used to display the glidepath errors from either the data link or monitor link oncross pointer needles. This indicator also determinesand displays backup pitch and roll attitude, as well asdisplaying side-slip and turn rate.DISCRETE MESSAGE INDICATOR128AV66836This indicator is located on the aircraft. Itdisplays nine status indications from the one-way linksystem, autopilot, and the beacon radar.WARNING INDEXER PANELThree warning lights on the warning indexerpanel informs the pilot of the status of the approachpower compensator, the status of the AFCS, andwhether a waveoff has been initiated. The threeindicators are the APC STBY, AFCS OUT, and theWAVEOFF indicators. The APC STBY willilluminate when the APC is in standby. The AFCSOUT will illuminate when the autopilot system is notoperating properly. The WAVEOFF indicator willilluminate when a wave-off has been initiated. Wheneither the AFCS OUT or the WAVEOFF indicatorsilluminate while in Mode I approach, the pilot isrequired to immediately take over control of theaircraft.APPROACH INDEXER 1284V653-1This unit is located on the aircraft. It provides anadditional angle-of-attack in the pilot’s field of view.This unit is used when flying cross pointers on aMode II approach or when monitoring display on aMode I approach.PRINCIPLES OF OPERATIONLearning Objective: Recognize the operatingprinciples of the automatic carrier landingsystem.The all-weather combination AFCS/ACLSprovides automatic, semiautomatic, or manualoperation for aircraft carrier operations withminimum use of airborne electronic subsystems. Theaircraft control commands are generated by shipboardcomputers so that the necessary pitch and banksignals can be received by the AFCS via the one-waydata link system. This closed-loop operation betweenaircraft and carrier provides automatic control totouchdown. This system provides a final approachand landing for carrier-based aircraft during daylightor darkness, with minimum interference forconditions of severe weather and sea state, and nolimitation due to low ceiling and visibility.There are three modes of operation of the ACLSthat can be selected by the pilot—Mode I, Mode II,and Mode III. Mode I is a fully automatic approachfrom entry point to touchdown on the flight deck.Mode II requires manual control of the aircraft. Inthis mode, the pilot controls the aircraft by observing9-3
cockpit displays. Mode III is manual pilot controlwith talkdown guidance by a shipboard controller thatprovides verbal information for pilot control to visualminimums. The pilot can use full Mode I capabilitywith Mode II and Mode III as backups.LANDING SEQUENCEThe landing sequence begins when the aircraft isat the marshaling point (fig. 9-2) under control of thecarrier air traffic control center (CATCC). Thesequence is in two phases: approach and descent.Flight from the marshaling point to the radaracquisition window is the approach phase. Flightfrom the radar window to touchdown is the descentphase. Transition from the approach phase to thedescent phase is done with a minimum of switchingoperations to reduce pilot task loading.MODE I LANDING OPERATIONFigure 9-3 shows the Mode I landing sequence.The sequence begins when the aircraft is at themarshaling point. Here the aircraft is held accordingFigure 9-2.-Automatic carrier landing sequence.9-4
Figure 9-3.-Mode I landing sequence.to fuel or safety status to determine landing priorities.It is here that the aircraft is assigned a data linkchannel for automatic landing. The pilot is clearedfor approach when the LDG CHK indicatorilluminates on the discrete message indicator. Thepilot prepares for landing by ensuring the APC is inautomatic and that all the other subsystems are on andoperating.As the aircraft continues its approach and passesthrough the acquisition radar window, the LCC radaracquires the aircraft, and the ACL RDY lamp lights onthe discrete message indicator. The acquisition radarwindow is located approximately 4 miles astern of theship. When the ACL RDY lamp lights, the CATCCsystem begins sending vertical and lateral errorsignals, which represent the actual displacement ofthe aircraft from the approach path. These signals areconverted to a display on the VGI. At this time, thepilot requests the approach mode desired—Mode I forfully automatic touchdown.The LCC system transmits a COUPLE discretesignal to the aircraft. This signal indicates that pitchand bank commands may be coupled to the autopilot.At this time, the pilot ensures that the APC isengaged; the landing gear, flaps, and speed brakes areextended; and the aircraft is near the approach speedwith wings level. With the autopilot turned ON and inAUTO, the pilot then switches the ACL/OFF/PCDswitch to ACL. This couples the data link to theautopilot. The pilot will then verbally acknowledgeengagement of the autopilot. The ground commandcontroller then sends the CMD CONT discrete signalto the aircraft. At this time, the system begins sendingpitch and bank command signals to the aircraft. Asthe aircraft continues down the approach path, and atapproximately 12.5 seconds from touchdown, the 10SEC discrete message will be sent. This messageinforms the pilot that deck motion compensation isbeing added to the glide-path commands.Compensation is in the form of a slight increase ordecrease in aircraft attitude as needed to adjust for themovement of the touchdown point in response to thecarrier’s movement. At 1.5 seconds from touchdown,the landing system freezes the pitch and bankcommands, and the autopilot holds the aircraftattitude until touchdown.SAFETY PROVISIONSThe automatic carrier landing system has manyprovisions to protect the pilot and the aircraft fromhuman errors or equipment failures. The monitor linkuses the ILS AN/SPN-41 to independently check theLCCS flight path progress. This allows the pilot tomonitor position in relation to the safe glide path.When the aircraft exceeds the Mode I flight path9-5
control envelope boundaries, as shown in figures 9-4and 9-5, the system ceases transmitting the COUPLEdiscrete signals. This turns off the lamp on thediscrete message indicator and causes the autopilot touncouple and revert to the STAB AUG mode. Theaircraft can continue to approach the carrier, but thepilot must be in Mode II or III. If the flight path errorincreases to the point where a large maneuver isrequired of the aircraft to bring it back on course, theground controller sends a wave-off message. Thiswave-off message totally disengages the carrierlanding system, lights a WAVEOFF lamp on thediscrete indicator, and allows the pilot to execute hiswave-off routine.Between 12.5 and 1.5 seconds from touchdown,the tracking and comparison radar sends a wave-offsignal automatically if the aircraft exceeds theboundaries shown in figures 9-4 and 9-5. A manualwave-off signal may also be sent by the appropriatecarrier personnel anytime the aircraft approach isconsidered unsafe.The pilot can override the system at anytime afterengaging the ACL mode by applying a control stickforce of 10 pounds fore or aft (pitch), or 7 poundslaterally (roll). Either of these motions will uncouplethe ACLS and automatically down mode the autopilotto the STAB AUG position. The pilot can continuethe approach manually under Mode II, Mode III, ILS,or visually, or decide not to chose any of these and goaround for another try.If the information stored in the data link is notupdated within any 2-second period after the firstreceipt of glide-path error data, a TILT discrete signalis transmitted and displayed on the discrete indicator.This causes the autopilot to disconnect from theFigure 9-4.-Vertical flight path control and automatic wave-off boundaries.9-6
Figure 9-5.-Lateral automatic wave-off boundaries.ACLS and revert back to STAB AUG. Whenever theautopilot disconnects from the ACL mode, the AFCSOUT indicator (on the discrete indicator) lights for 20seconds, and then goes out.If the pilot is monitoring glide path errors fromthe data link on the VGI cross pointers and a displayof a TILT or WAVEOFF discrete signal appears, thecross pointers will drive out of view. There is noeffect on the cross pointers, from these discretes, ifthe monitor link is being used. If the monitor link isbeing used for glide-path error display and thereceived RF signal is lost, the cross pointers aredriven to a fly-up, fly-right indication. This will alertthe pilot to take corrective action. If the monitor linkis turned off or if primary power is lost, the crosspointers are driven out of view. When the radarbeacon is being interrogated and is transmitting areplay in the ACLS mode, the BCN ON lamp (on thediscrete indicator) lights, informing the pilot that thebeacon is operating. When power to the VGI isremoved or interrupted, a warning flag is immediatelydisplayed on the indicator. All of these functionsguard against any system malfunctions that mayendanger the pilot or the aircraft.Q1.Q2.Q3.Q4.REVIEW QUESTIONSTrue or False. The ACLS is a self-containedsystem located completely on the aircraft.What are the three modes of operation of theACLS?At what point in the sequence does the LCCradar acquire the aircraft?If the autopilot decouples from the ACL modeof operation, does the pilot have to initiatewave-off procedures?9-7
CHAPTER 10ELECTROSTATIC DISCHARGE PROGRAMThe electrical noise generated in a radio or radarreceiver is often confused with electrical noisegenerated external to the receiver and coupled into thereceiver. The internally generated noise is the resultof circuit deficiencies in the receiver itself, and can beeliminated by replacing the defective component orreplacing the entire receiver. Electrical noiseproduced external to the receiver enters the receiverby various means. The noise causes interference inthe receiver, as well as poor reception.In early naval aircraft, electrical noise interferencewas not a major problem because there werefewer external sources of electrical noise. Receiversensitivities were low, and the aircraft controlcomponents were manually operated. In today’saircraft, however, there are considerably moresources of externally generated electrical noise. Theaircraft now contains numerous receivers with highersensitivities, and the aircraft controls are operated byvarious electrical and/or mechanical devices. Thesedevices include control surface drive motors, fuel andhydraulic boost pumps, ac inverters, and cabinpressurization systems. In addition, pulsed electronictransmitters, such as TACAN, radar, and IFF, can besources of electrical noise interference. Listening toelectrical noise interference in the output of a radioreceiver can cause nervous fatigue in aircrewpersonnel. Electrical noise may also reduce theperformance (sensitivity) of the receiver. For thesereasons, electrical noise should be kept at the lowestpossible level.The overall objective of this chapter is to assistyou in recognizing various types of electrical/electronic noise, their effects on radio and radarreceivers, and what the electrostatic dischargeprogram means to you as the work center supervisor.This chapter also provides you with information forkeeping electrical noise interference as low aspossible in electronic equipment aboard navalaircraft.TYPES AND EFFECTS OF RECEIVERNOISE INTERFERENCELearning Objective: Recognize the types andeffects of radio noise, including natural andman-made interference.The types of electrical noise interference thatenter aircraft receivers are broadly categorized asnatural interference and man-made interference.NATURAL INTERFERENCERadio interference caused by natural electricalnoise is separated into three types: atmosphericstatic, precipitation static, and cosmic noise. Eachtype is discussed below.Atmospheric StaticAtmospheric static is a result of the electricalbreakdown between masses (clouds) of oppositelycharged particles in the atmosphere. An extremelylarge electrical breakdown between two clouds orbetween the clouds and ground is called “lightning.”Atmospheric static is completely random in nature,both as to rate of recurrence and as to intensity ofindividual discharges. Atmospheric static producesirregular popping and crackling in audio outputs and“grass” on visual output devices. Its effects rangefrom minor annoyance to complete loss of receiverusefulness. Atmospheric interference is seldom of acrippling intensity at frequencies from 2 MHz to 30MHz, but it can be annoying. Above 30 MHz, thenoise intensity decreases to a very low level. Atfrequencies below 2 MHz, natural static is theprincipal limiting factor on usable receiver sensitivity.The intensity of atmospheric static varies withlocation, season, weather, time of day, and thefrequency to which the receiver is tuned. It is mostintense at the lower latitudes, during the summerseason, during weather squalls, and at the lower radiofrequencies. Many schemes have been devised tominimize the effects of atmospheric static. However,the best technique is to avoid those frequenciesassociated with intense static, if possible.10-1
Precipitation StaticPrecipitation static is a type of interference thatoccurs during dust, snow or rain storms. Theprincipal cause of precipitation static is the coronadischarge of high-voltage charges from various pointson the airframe. These charges may reach severalhundred thousand volts before discharge occurs. Thecharge can be built up in two ways. First, anelectrostatic field existing between two oppositelycharged thunderclouds induces bipolar charges on thesurfaces of the aircraft as it passes through thecharged clouds. Second, a high unipolar charge onthe entire airframe occurs from frictional charging bycollision of atmospheric particles (low altitudes) orfine ice particles (high altitudes) with the aircraft’ssurface. The effects of corona discharge vary withtemperature. The effects increase as altitude andairspeed increase. Doubling airspeed increases theeffect by a factor of about 8; tripling airspeedincreases the effect by a factor of about 27.The effect of precipitation static is a loud hissingor frying noise in the audio output of a communicationreceiver and a corresponding “grass”indication on a visual output device. The radiofrequency range affected by precipitation static isnearly the same as for atmospheric static. Whenpresent, precipitation interference is severe, and oftentotally disables all receivers tuned to the low- andmedium-frequency bands.Cosmic NoiseCosmic noise is usually heard in the UHF bandand above. However, it is occasionally heard atfrequencies as low as 10 MHz. Cosmic noise iscaused by the radiation of stars. Although its effect isgenerally unnoticed, at peaks of cosmic activity,cosmic noise interference could conceivably be alimiting factor in the sensitivity of navigational andheight-finder radar receivers.MAN-MADE INTERFERENCEMan-made interference is generally categorizedaccording to the spectrum of its influence, such asbroadband and narrow band. Each type of man-madeinterference is discussed below.Broadband InterferenceBroadband interference is generated when thecurrent flowing in a circuit is interrupted or varies at arate that departs radically from a sinusoidal rate. Acurrent whose waveform is a sine wave is capable ofinterfering only at a single frequency. Any otherwaveform contains harmonics of the basic frequency.The steeper the rise or fall of current, the higher theupper harmonic frequency will be. A perfectrectangular pulse contains an infinite number of oddharmonics of the frequency represented by its pulserecurrence rate. Typical types of electricaldisturbances that generate broadband interference areelectrical impulses, electrical pulses, and randomnoise signals.For purposes of this discussion, impulse is theterm used to describe an electrical disturbance, suchas a switching transient that is an incidental product ofthe operation of an electrical or electronic device.The impulse recurrence rate may or may not beregular. Pulse is the term used to describe anintentional, timed, momentary flow of energyproduced by an electronic device. The pulserecurrence rate is usually regular.Switching transient or impulses result from themake or break of an electrical current. They areextremely sharp pulses. The duration and peak valueof these pulses depend upon the amount of currentand the characteristics of the circuit being opened orclosed. The effects are sharp clicks in the audiooutput of a receiver and sharp spikes on anoscilloscope trace. The isolated occasionaloccurrence of a switching transient has little or nosignificance. However, when repeated often enoughand with sufficient regularity, switching transients arecapable of creating intolerable interference to audioand video circuits, thus degrading receiverperformance. Typical sources of sustained switchingtransients are ignition timing systems, commutatorsof dc motors and generators, and pulsed navigationallighting.Pulse interference is normally generated bypulsed electronic equipment. This type of interferenceis characterized by a popping or buzzing inthe audio output device and by noise spikes on anoscilloscope. The interference level depends upon thepulse severity, repetition frequency, and the regularityof occurrence. Pulse interference can trigger beaconsand IFF equipment and cause false target indicationson the radar screens. In certain types of navigationalbeacons, these pulses cause complete loss ofreliability.Random noise consists of impulses that are ofirregular shape, amplitude, duration, and recurrence10-2
ate. Normally, the source of the random noise is avariable contact between brush and commutator baror slip ring, or an imperfect contact or poor isolationbetween two surfaces.Narrow-Band InterferenceNarrow-band interference is almost alwayscaused by oscillators or power amplifiers in receiversand transmitters. In a receiver, the cause is usually apoorly shielded local oscillator stage. In a transmitter,several of the stages could be at fault. Theinterference could be at the transmitter operatingfrequency, a harmonic of its operating frequency, or atsome spurious frequency. A multichannel transmitterthat uses crystal-bank frequency synthesizing circuitscan produce interference at any of the frequenciespresent in the synthesize. Narrow-band interferencein a receiver can range in severity from an annoyingheterodyne whistle in the audio output to the completeblocking of received signals. Narrow-bandinterference affects single frequencies or spots offrequencies in the tuning range of the affectedreceiver.SOURCES OF ELECTRICAL NOISELearning Objective: Recognize the varioussources of electrical noise and the operatingcharacteristics of each.Any circuit or device that carries a varyingelectrical current is a potential source of receiverinterference. The value of the interference voltagedepends upon the amount of voltage change. Thefrequency coverage depends upon the abruptness ofthe change. The principal sources of man-madeinterference in aircraft include rotating electricalmachines, switching devices, pulsed electronicequipment, propeller systems, receiver oscillators,nonlinear elements, and ac power lines. Each of thesesources of noise is discussed in the followingsections.ROTATING ELECTRICAL MACHINESRotating electrical machines are a major source ofreceiver interference because of the large number ofelectric motors used in the aircraft. Rotatingelectrical machines used in aircraft may be dividedinto three general classes: dc motors, ac motors andgenerators, and inverters.DC MotorsModern aircraft use dc motors in great numbers,such as in flight control actuators, armamentactuators, and flight accessories. Most electronicequipment on the aircraft include one or more dcmotors for driving cycling mechanisms, compressorpumps, air circulators, and antenna mechanisms.Each of these motors can generate voltages capable ofcausing radio interference over a wide band offrequencies. Types of interfering voltages generatedby dc motors areas follows:l Switching transients generated as the brushmoves from one commutator bar to another(commutation interference). Random transients produced by varyingcontact between the brush and the commutator(sliding contact interference). Audio-frequency hum (commutator ripple). Radio frequency and static charges built up onthe shaft and the rotor assemblyThe dc motors used in aircraft systems are ofthree general types: the series- wound motor, theshunt-wound motor, and the permanent-magnet (PM)motor. The field windings of both series- andshunt-wound motors afford some filter action againsttransient voltages generated by the brushes. The PMmotor’s lack of such inherent filtering makes it a verycommon source of interference. The size of a dcmotor has little bearing upon its interferencegenerating characteristics. The smallest motor aboardthe aircraft can be the worst offender.AC Generators and MotorsThe output of an ideal alternating-currentgenerator is a pure sine wave. A pure sine-wavevoltage is incapable of producing interference exceptat its basic frequency. However, a pure waveform isdifficult to produce, particularly in a small acgenerator. Nearly all types of ac generators used innaval aircraft are potential sources of interference atfrequencies other than the output power frequency.Interference voltages are produced by the followingsources:l Harmonics of the power frequency. Generally,the harmonics are caused by poor waveform.. Commutation interference. This conditionoriginates in a series-wound motor.10-3
l Sliding-contact interference. This conditionoriginates in an alternator and in a series-woundmotor.Generally, an ac motor without brushes does notcreate interference.InvertersAn inverter is a dc motor with armature tapsbrought out to slip rings to supply an ac voltage. Theac output contains some of the interference voltagesgenerated at the dc end, as well as the brushinterference at the ac end of the inverter.SWITCHING DEVICESA switching device makes abrupt changes inelectrical circuits. Such changes are accompanied bytransients capable of interfering with the operation ofradio and other types of electronic receivers. Thesimple manual switch (occasionally operated) is oflittle consequence as a source of interference.Examples of switching devices (frequently operated)capable of causing appreciable or serious interferenceare the relay and the thyratron.RelaysA relay is an electromagnetically operatedremote-control switch. Its main purpose is to switchhigh-current, high-voltage, or other critical circuits.Since the relay is used almost exclusively to controllarge amounts of power with relatively small amountsof power, the relay is always a potential source ofinterference. This is especially true when the relay isused to control an inductive circuit. Relay-actuatingcircuits should not be overlooked as possibleinterference sources. Even though the actuatingcurrents are small, the inductances of the actuatingcoils are usually quite high. It is not unusual for thecontrol circuit of a relay to produce more interferencethan the controlled circuit.ThyratronsA thyratron is a gas-filled, grid-controlled,electronic switching tube used mainly in radarmodulators. The current in a thyratron is either ON orOFF; there is no in-between. Since the time requiredto turn a thyratron ON is only a few microseconds, thecurrent waveform in a thyratron circuit always has asharp leading edge. As a result, the waveform is richin radio interference energy. The voltage and peakpower in a radar modulator are usually very high, andthe waveforms are intentionally made as sharp andflat as possible. Although these factors are essentialfor proper radar operation, they also increase theproduction of interference energy.PULSED ELECTRONIC EQUIPMENTPulse interference is generated by pulsedelectronic equipment. Types of systems that fallwithin this category include radar, beacons,transponders, and coded-pulse equipment.RadarIn radar equipment, range resolution dependslargely on the sharpness of the leading and trailingedges of the pulse. The ideal pulse is a perfect squarewave. Target definition is also dependent on thenarrowness of the pulse. Both the steepness and thenarrowness of a pulse determine the number andamplitudes of harmonic frequencies. With respect tothe shape of a radar pulse, the better the radar isworking, the greater the interference it is capable ofproducing. Most of the interference is produced atfrequencies other than those leaving the radarantenna, except in receivers operating with the radarband.Radar interference at frequencies below theantenna frequency severely affects all receivers inuse. Principal sources of such interference are themodulator, pulse cables, and transmitter.Transponders, Coded-Pulse Equipment, andBeaconsThis group includes IFF, beacons, TACAN,teletype, and other coded-pulse equipment. Theinterference energy produced by this group is thesame as that produced by radar-pulsing circuits. Theeffects of this interference energy are lessenedbecause the equipment is usually self-contained inone shielded case, and uses lower pulse power. Theeffects are increased because the radiatingfrequencies are lower, which allows fundamentalfrequencies and harmonics to fall within thefrequency bands used by other equipment. Eachpiece of equipment is highly capable of producinginterference outside the aircraft where it can be pickedup by receiver antennas.10-4
PROPELLER SYSTEMSPropeller systems, whether hydraulically orelectrically operated, are potent generators of radiointerference. The sources of interference includepropeller pitch control motors and solenoids,governors and associated relays, synchronizers andassociated relays, deicing timers and relays, andinverters for synchro operation.Propeller control equipment generates clicks andtransients as often as 10 per second. The audiofrequency envelope of commutator interferencevaries from about 20 to 1000 Hz. The propellerdeicing timer generates intense impulses at amaximum rate of about 4 impulses per minute.Values of current in the propeller system arerelatively high; consequently, the interferencevoltages generated are severe. They are capable ofproducing moderate interference at frequencies below100 kHz and at frequencies above 1 MHz. However,the interference voltages can cause severeinterference at intermediate frequencies.RECEIVER OSCILLATORSEither directly or through frequency multipliersor synthesizers, the local oscillator in asuperheterodyne receiver generates an RF signal at agiven frequency. The local oscillator signal is mixedwith another RF signal to produce an intermediatefrequency (IF) signal. Depending on receiver design,the frequency of the local oscillator signal is eitherabove or below the frequency of the RF signal by afrequency equal to the IF.The amount of interference leaving the receiverthrough its antenna is roughly proportional to the ratioof the tuned input frequency to the intermediatefrequency. For any tuning band on the receiver,oscillator leakage is highest at the low end of theband. Also, the lower the intermediate frequency, thegreater the leakage probability.Although the receiver antenna is the principaloutlet of oscillator leakage, leakage can occur fromother points. Any path capable of introducinginterference into a receiver is also capable of carryinginternally generated interference out of the receiver.The paths of entry are discussed in more detail later inthis chapter.Oscillator leakage from a single communicationsreceiver in an aircraft is not likely to be a direct sourceof interference, except in a very large aircraft wheretwo or more frequencies in the same band are usedsimultaneously. However, high-order harmonics ofthe oscillator frequency can become troublesome inthe VHF band and above.Oscillator leakage from a swept-tuning receivercan produce interference in any receiver aboard theaircraft. This is done directly (on harmonics) or bynonlinear mixing, as shown in the following example:. Receiver A, operating at a frequency of 2100kHz, with an IF of 500 kHz, has oscillator leakage at2600 kHz (or 1600 kHz).. Receiver B, operating at 150 MHz, with an IFof 10 MHz, has oscillator leakage at 160 MHz (or 140MHz).. Receiver C, sweeping a frequency band from200 to 300 MHz, with an IF of 30 MHz, has oscillatorleakage across the band 170 to 270 MHz (or 230 to330 MHz).Each receiver is capable of interfering with theother receivers at the oscillator frequency and itsharmonics. In addition, with the presence of anonlinear detector, the leakage signals from the threereceivers can be mixed and interfere with thefollowing frequencies:l Receivers A and B, after nonlinear mixing, canproduce interference at 160±2.6 MHz.. Receivers A and C can similarly produceinterference at any frequency from 200±2.6 to 300±2.6 MHz; receivers B and C between 200 ±160 to300±160 MHz.NONLINEAR ELEMENTSA nonlinear element is a conductor,semiconductor, or solid-state device whose resistanceor impedance varies with the voltage applied across it.Consequently, the resultant voltage is not proportionalto the original applied voltage. Typical examples ofnonlinear elements are metallic oxides, certainnonconducting crystal structures, semiconductordevices, and electron tubes. Nonlinear elements thatcould cause radio interference in aircraft systems areoverdriven semiconductors and vacuum tubes,oxidized or corroded joints, cold-solder joints, andunsound welds.In the presence of a strong signal, a nonlinearelement acts like a detector or mixer. It produces sumand difference frequencies and any harmonics from10-5
the signal applied to it. These spurious frequenciesare called “external cross-modulation.” Thesespurious frequencies (sum, difference, andharmonics) can be expected to cause interferenceproblems when the combined product of their fieldstrengths exceed 1 millivolt.A common example of this action is the entry of astrong off-frequency RF voltage into the mixer stageof a superheterodyne receiver. By the time theinterfering signal has passed through the preselectorstages of the receiver, it has undergone distortion byclipping. Therefore, the interfering signal isessentially a rectangular wave that is rich inharmonics. Frequency components of the wave beatboth above and below the local oscillator frequencyand its harmonics, and produce, at the output of themixer, signals that are acceptable to the IF amplifier.POWER LINESAlternating current power sources have alreadybeen briefly discussed as broadband interference.Even though they are conducting a nearly sinusoidalwaveform, ac signals on power lines are capable ofinterfering with audio signals in receivers. In suchcases, only the power-line frequency appears.However, where multiple sources of ac power arepresent, these signals are capable of being mixed inthe same manner as discussed under receiveroscillators. Sum and difference frequencies appear.In at-powered equipment, ac hum can appear atthe power frequency or at the rectification ripplefrequency. The rectification ripple frequency is twicethe power frequency times the number of phases.Normally, aircraft systems use only single- andthree-phase sources at a nominal 400 Hz. Full-waverectification with single-phase 400-Hz power gives aripple frequency of 800 Hz. A three-phase sourcewould give a 2400 Hz ripple. This ripple producesinterference varying from annoyance to completeunreliability of equipment, depending upon theseverity and its coupling to susceptible elements.Openings in the outer shields of equipment arenecessary for the entrance of power leads, controlleads, mechanical linkages, ventilation, and antennaleads. Interference entering these openings isamplified by various amounts, depending upon thepoint of entry into the equipment’s circuits. Couplingbetween the entry path and the sensitive points of thereceiver can be in any form.CONDUCTIVE COUPLINGInterference is often coupled from its source to areceiver by metallic conduction. Normally, this isdone by way of mutual impedance, as shown infigure 10-1. Note in the figure that A is the powersource, B the receiver, and C the interference source.The interference is maximum at the interferencesource (C), and attenuates rapidly to a relatively lowvalue at the battery (A). This occurs because of thevery low impedance of the battery. It is apparent fromthe size of the arrows that the nearer the power tap ofthe receiver (B) to the interference source (C), thegreater the amplitude of interfering current in the BCloop.INDUCTIVE-MAGNETIC COUPLINGEvery current-carrying conductor is surroundedby a magnetic field whose intensity variations arefaithful reproductions of variations in the current inthe conductor. When another parallel conductor is cutby the lines of force of this field, the conductor has acurrent induced into it. The amplitude of the inducedcurrent depends upon the following factors:The strength of the current in the firstconductorThe nearness of the conductors to each otherThe angle between the conductorsThe length through which the conductors areexposed to each otherINTERFERENCE COUPLINGLearning Objective: Identify the varioustypes of electrical interference caused bycoupling, and recognize the means used toreduce the interference.Figure 10-1.-Path of conducted interference.10-6
The amount of the variation in the current thatdirectly affects variation in the magnetic fieldsurrounding the conductor depends upon the nature ofthe current. When the conductor is a power lead to anelectric motor, all the frequencies and amplitudesassociated with broadband interference are present inthe magnetic field. When the lead is an ac power lead,a strong sinusoidal magnetic field is present. Whenthe lead is carrying switched or pulsed currents,extremely complex broadband variations are present.As the magnetic field cuts across a neighboringconductor, a voltage replica of its variation is inducedinto the neighboring wire. This causes a current toflow in the neighboring wire. When the neighboringwire leads to a sensitive point in a susceptiblereceiver, serious interference with that receiver’soperation can result. Similarly, a wire carrying asteady, pure dc current of high value sets up amagnetic field capable of affecting the operation ofequipment whose operation is based upon the earth’smagnetic field.Shielding a conductor against magnetic inductionis both difficult and impractical. Nonferrousshielding materials have little or no effect upon amagnetic field. Magnetic shielding that is effective atlow frequencies is prohibitively heavy and bulky.In aircraft wiring, the effect of induction fieldsshould be minimized. This can be done by use of theproper spacing and coupling angle between wires.The degree of magnetic coupling diminishes rapidlywith distance. Interference coupling is least when thespace between active and passive leads is at amaximum, and when the angle between the leadsapproaches a right angle.INDUCTIVE-CAPACITIVE COUPLINGCapacitive (electric) fields are voltage fields.Their effects depend upon the amount of capacitanceexisting between exposed portions of the noisy circuitand the noise-free circuit. The power transfercapabilities are directly proportional to frequency.Thus, high-frequency components are more easilycoupled to other circuits. Capacitive coupling isrelatively easy to shield out by placing a groundedconducting surface between the interfering source andthe susceptible conductor.COUPLING BY RADIATIONAlmost any wire in an aircraft system can, atsome particular frequency, begin to act like anantenna through a portion of its length. Inside anairframe, however, this occurs only at very highfrequencies. At high frequencies, all internal leadsare generally well shielded against pickup ofmoderate levels of radiated energy. Perhaps the onlycases of true inside-the-aircraft radiation at HF andbelow occur in connection with unshielded orinadequately shielded transmitter antenna leads.COMPLEX COUPLINGSome examples of interference coupling involvemore than one of the types (conduction, induction, orradiation) just discussed. When more than onecoupling occurs simultaneously, corrective actions,such as bonding, shielding, or filtering, used tocorrect one type of coupling can increase the couplingcapabilities of another type of coupling. The resultmay be an increase in the transfer of interference. Forexample, an unbended, unfiltered dc motor cantransfer interference to a sensitive element byconduction, inductive coupling, capacitive coupling,and by radiation. Some frequencies are transmittedpredominately by one form of coupling and somefrequencies by others. At still other frequencies, allmethods of transmission are equally effective. On themotor used in the example above, bonding almostalways eliminates radiation from the motor shell. Italso increases the intensity in one of the othermethods of transmission, usually by conduction. Theexternal placement of a low-pass filter or a capacitorusually reduces the intensity of conductedinterference. At the same time, it may increase theradiation and induction fields. This occurs becausethe filter appears to interference voltages to be alow-impedance path across the line. Relatively highinterference currents then flow in the loop formedbetween the source and the filter. For complexcoupling problems, multiple solutions may berequired to prevent the interference.RADIO INTERFERENCE REDUCTIONCOMPONENTSLearning Objective: Recognize variousmethods and components used to reduceradio interference caused by electrical noise.Radio interference reduction at the source maybeaccomplished to varying degrees by one or more of10-7
the following methods: short circuiting, dissipation,open circuiting, or a combination of all three.Discrete components are normally used toachieve interference reduction at the source.Capacitors, resistors, and inductors are used to shortcircuit, dissipate, and open circuit the interference,respectively.CAPACITORSShort circuiting of interference is done by usingcapacitors connected across the source. The perfectcapacitor looks like an open circuit to dc or the powerfrequency, and progressively as a shoft circuit to ac asthe frequency is increased.FunctionThe function of a capacitor in connection withradio interference filtering is to provide alow-impedance, radio-frequency path across thesource. When the reactance of the capacitor is lowerthan the impedance of the power lines to the source,high-frequency voltages see the capacitor as a shorterpath to ground. The capacitor charges to the linevoltage. It then tends to absorb transient rises in theline voltage and to provide energy for cancelingtransient drops in the line voltage.LimitationsThe efficiency of a perfect capacitor in bypassingradio interference increases indirect proportion to thefrequency of the interfering voltage, and in directproportion to the capacitance of the capacitor. Allcapacitors have both inductance and resistance. Anylead for connecting the capacitor has inductance andresistance as a direct function of lead length andinverse function of lead diameter. Some resistance isinherent in the capacitor itself in the form of dielectricleakage. Some inductance is inherent in the capacitor,which is usually proportional to the capacitance.The effect of the inherent resistance in ahigh-grade capacitor is negligible as far as its filteringaction is concerned. The inherent inductance, plusthe lead inductance, seriously affects the frequencyrange over which the capacitor is useful. The bypassvalue of a capacitor with inductance in series varieswith frequency.At frequencies where inductive reactance is muchless than capacitive reactance, the capacitor looksvery much like a pure capacitance. As the frequencyapproaches a frequency at which the inductivereactance is equal to the capacitive reactance, the netseries reactance becomes smaller until the resonantfrequency, a point of zero impedance, is reached. Atthis point, maximum bypass action occurs. Atfrequencies above the resonant frequency, theinductive reactance becomes greater than thecapacitive reactance. The capacitor then exhibits anet inductive reactance, whose value increases withfrequency. At frequencies much higher than theresonant frequency, the value of the capacitor as abypass becomes lost.The frequency at which the reversal of reactanceoccurs is controlled by the size of the capacitor andthe length of the leads. For instance, the installationof a very large capacitor frequently requires the use oflong leads. As an example of the influence of leadlength upon the bypass value of a capacitor, thefollowing data is presented to a typical 4-microfaradcapacitor whose inherent inductance is 0.0129 henrys:LEAD LENGTHCROSSOVER FREQUENCY1 inch 0.47 MHz2 inches 0.41 MHz3 inches 0.34 MHz4 inches 0.30 MHz6 inches 0.25 MHzNote that for the 4-µF capacitor, each additionalinch of lead causes the capacitance-inductancecrossover point to be reduced.In figure 10-2, notice the capacitance-toinductancecrossover frequencies for various leadlengths of a 0.05 microfarad capacitor. Also, noticethe difference in the crossover frequencies for the3-inch lead for the 4-µF capacitor, discussed above,and for the 3-inch lead for the 0.05-capacitorreferenced in figure 10-2.Coaxial Feedthrough CapacitorsCoaxial feedthrough capacitors are available withcapacitances from 0.00005 to about 2 µF. Thesecapacitors work well up to frequencies several timesthose at which capacitors with leads become useless.10-8
Figure 10-2.-Crossover frequency of a 0.05-microfarad capacitor with various lead lengths.The curves in figure 10-3 compare the bypassvalue of a feedthrough capacitor of 0.05 µF with thatof a hypothetically perfect capacitor of the samecapacitance. The feedthrough capacitor differs fromthe capacitor with leads in that the feedthroughcapacitor type forms a part of both the circuit beingfiltered and the shield used to isolate the filteredsource. Lead length has been reduced to zero. Thecenter conductor of the feedthrough capacitor mustcarry all the current of the filtered source and musthave an adequate current rating to ensure against dcloss or power frequency insertion loss. The internalFigure 10-3.-Crosover frequency of a 0.05-microfarad feedthrough capacitor.10-9
Figure 10-4.-Internal construction of feedthrough and conventional capacitor.constructions of feedthroughcapacitors are shown in figuredifferences in the two types.Selection of Capacitorsand conventional10-4. Notice theCapacitors used for filtering circuits in aircraftshould be selected for characteristics such as physicalsize, high temperature and humidity tolerances, andphysical ruggedness. The capacitors should have anadequate voltage rating (at least twice that of thecircuit to be filtered), and should be installed withminimum lead length.Application of Capacitive FiltersEvery circuit carrying an unintentionally varyingvoltage or current capable of causing radiointerference should be bypassed to ground by suitablecapacitors. When the nature of the variations are suchthat interference is caused at both high and lowfrequencies, a capacitor should be chosen andinstalled to provide an adequate insertion loss at thelowest frequency where interference exists. Whenthe overall capacitance required at low frequencyprovides inadequate insertion loss at high frequencies,it should be bridged in the shortest and most directmanner possible by a second capacitor.A capacitive filter should be installed as near aspossible to the actual source of interference. Leadlength should be held to an absolute minimum for tworeasons. First, the lead to the capacitor carriesinterference that must not be allowed to radiate.Second, the lead has inductance that tends to lowerthe maximum frequency for which the capacitor is aneffective bypass.To the extent possible, a filter capacitor should beinstalled to make use of any element of the filteredcircuit that provides a better filtering action. Figures10-5, 10-6, and 10-7 illustrate proper use of filtercapacitors.Capacitive Filtering in an AC CircuitThe radio interference generated in slip ring acmotors and generators is a transient caused bysliding contacts plus high-frequency energy fromother internal sources. For this reason, filteringshould be aimed at reducing high-frequency andvery-high-frequency noise components with the useof low-capacitance, high-grade capacitors. Whereverpossible, feedthrough capacitors should be used.Capacitances should be chosen low enough in valueto represent a high impedance at the power frequencyand to avoid resonance with the internal inductancesof the filtered unit. Voltage ratings should be at leasttwice the peak voltage across the capacitors.In a four-wire electrical system, the neutral leadcarries all three phases; a large quantity of the thirdharmonic of the power frequency is present. ThisFigure 10-5.-Capacitive filtering of a reversible dc seriesmotor.10-10
Figure 10-6.-Capacitive filtering of a three-phase attenuator.frequency must be considered in setting capacitancelimits and in filtering the return lead. Normal valuesof capacitance for filtering 400-hertz leads vary from0.05 to 0.1 µF.Capacitive Filtering of Switching DevicesNormally, a capacitor should not be used by itselfas a filter on a switch in a dc system. In the openposition, the capacitor bridging the switch assumes acharge equal to the line voltage. When the switchcloses, the capacitor discharges at such a rapid ratethat it generates a transient energy, whose interferencevalue exceeds that caused by the opening of theunfiltered circuit. The capacitor across a switchshould have enough series resistance to provide aslow discharge when the capacitor is shorted by theswitch.RESISTIVE-CAPACITIVE FILTERSA resistive-capacitive (RC) filter is an effectivearc and transient absorber. The RC filter reducesinterference in two ways—by changing the waveformof transients and by dissipating transient energy.Figure 10-8 shows how an RC filter is connectedacross a switch.Without the RC filter, the voltage appearingacross the switch at the instant the switch is openedis equal to the sum of the line voltage and aninductive voltage of the same polarity. Theamplitude of the inductive surge depends upon theinductance of the line and the amplitude of theclosed-circuit current.When the sum of the voltages appearing acrossthe switch is great enough, arcing occurs. When thecapacitance is large enough, the capacitor absorbssufficient transient energy to reduce the voltage tobelow arcing value. During the charging time of thecapacitor, the resistor is passing current anddissipating some of the transient energy.For maximum absorption of the circuit openingtransients, resistance should be small and capacitanceshould be large. Good representative values areR = 1/5 load resistance and C = 0.25 µF.Figure 10-7.-Capacitive filtering of a servomotor.Figure 10-8.-An RC filter connected across a switch.10-11
Figure 10-9.-Methods for using RC filters in relay circuits.Figure 10-9 shows two RC filters used to absorbthe transient interference resulting from the openingof a relay field. In circuit A, the value of Ra should below enough to provide a resistance path to ground lessthan the line impedance and high enough to lower theQ sufficiently. The capacitor should be at least 0.25µF with a voltage rating several times the lonevoltage. Circuit B has the advantages of reducing thecapacitor and coil leads to absolute minimum andreducing the relay field current. It has thedisadvantage of carrying the dc coil current. Normalvalues of each resistance (Rb) in circuit B is 5 percentof the dc resistance of the coil. The capacitor isnormally 0.25 µF. Circuit B serves as both a dampingload and a high-loss transmission line.INDUCTIVE-CAPACITIVE FILTERSFiltering of radio interference is done by means ofan inductor inserted in series with the ac powersource. The inductor offers negligible impedance tothe ac or power-line frequency and an increasinglyhigh impedance to transient interference as frequencyis increased. Combinations of inductance andcapacitance are widely used to reduce both broadbandand narrow-band interference.filter prevents the transmission of interferencevoltages into the wiring harness, and blockstransmission or reception of radio-frequency energyabove a specified frequency.The ideal low-pass filter has no insertion loss atfrequencies below its cutoff frequency, but has aninfinite insertion loss at all higher frequencies.Practical filters fall short of the ideal in three ways.First, a filter of acceptable physical size and weighthas some insertion loss, even under dc conditions.Second, because of the lack of a pure inductor, thetransition from low to high impedance is gradualinstead of abrupt. Third, the impedance is held to afinite value for the same reason. Figure 10-10compares the insertion loss of a typical low-pass filterwith that of the hypothetical ideal filter.Figure 10-11 shows the arrangement and typicalparameters of a low-pass filter that has a design cutofffrequency of 100 kHz. Inductor L must carry loadcurrent. It must be wound of wire large enough thatIts dc insertion loss is negligible. Therefore, filtersare rated as to maximum current. The capacitors C1Filters used to reduce radio interference transmissionsare available in the Navy supply system.The filters come in a large variety of types and sizes.Filters are classified as to their frequency characteristics-namely,low-pass, high-pass, bandpass, andband-reject filters.Filters are also classified as to their applications-namely,power-line, antenna, and audiofilters. The type most often used in aircraft is thelow-pass, power-line filter.Low-Pass FiltersA low-pass filter is used in an aircraft to filterpower leads coming from interference sources. TheFigure 10-10.-Insertion loss curve of a low-pass power-linefilter.10-12
Figure 10-11.-Low-pass filter circuit.and C2 must withstand the line voltage. Therefore,filters are also rated as to maximum voltage.At frequencies immediately below cutoff, the filterlooks capacitive to both the generator and the load.Inductive reactance XL has very little influence, and nofiltering action takes place. However, at frequenciesabove cutoff, the series reactance of coil L becomesincreasingly higher. The series reactance of coil L islimited only by the resistance of the coil and itsdistributed capacitance. Coil L then functions as ahigh-frequency disconnect. The bypass values of bothC1 and C2 become increasingly higher, and are limitedonly by the inductance of the capacitors and their leads.As a result of these two actions, high-frequencyisolation between points A and B is achieved.High-Pass FiltersIn almost all radio transmitters operating at highfrequencies (HF) and above, the master oscillatorsignal is generated at a submultiple of the outputfrequency. By use of one or more frequencymultipliers, the basic oscillator frequency is raised tothe desired output frequency. At the input to theantenna, an overdriven output amplifier may outputthe output frequency and harmonics of the outputfrequency. A high-pass filter is very effective inpreventing the undesired harmonics from reaching theantenna and being radiated.High-pass filters are also useful for isolating ahigh-frequency receiver from the influence of energyof signals of lower frequencies. Figure 10-12 shows atypical high-pass filter being used to reduceradio-noise interference. In symmetrical high-passfilter sections (Z in= Z out), the series combination ofC1 and L should resonate at @ times the desiredcutoff frequency. The L/C ratio that is chosen shouldhave a square root equal to the terminal impedance.Figure 10-12.-Schematic diagram of a high-pass filter section.that band. Bandpass filters find their greatestapplication in the following reamer:Decoupling the receiver from shock andoverload by transmitters operating above andbelow the receiver bandMultiplexing and decoupling two or morereceivers or transmitters using the sameantennaA bandpass filter can be one of many forms andconfigurations, depending upon its application. Forfiltering antennas, a bandpass filter normally consists ofone or more high-pass filter sections, followed by one ormore low-pass filter sections. The configuration ofsections is normally selected so the upper limit of thepass band approaches or exceeds twice the frequency ofthe lower limit of the pass band. Figure 10-13 showstypical arrangements for bandpass filters.Bandpass FiltersBandpass filters provide a very high impedanceabove and below a desired band of frequencies withinFigure 10-13.-Examples of bandpass filter circuits.10-13
Band-Rejection FiltersA band-rejection (band-stop) filter is used toreject or block a band of frequencies from beingpassed. This filter allows all frequencies above andbelow this band to be passed with little or noattenuation.The band-stop filter circuit consists of inductiveand capacitive networks combined and connected toform a definite frequency response characteristic.The band-stop filter is designed to attenuate a specificfrequency band and to permit the passage of allfrequencies not within this specific band. Thefrequency range over which attenuation or poortransmission of signals occurs is called the“attenuation band.” The frequency range over whichthe passage of signals readily occurs is called the“bandpass.” The lowest frequency at which theattenuation of a signal starts to increase rapidly isknown as the lower cutoff frequency. The highestfrequency at which the attenuation of a signal starts toincrease rapidly is known as the upper cutofffrequency. The basic configurations into which theband-reject filter elements can be arranged orassembled are known as the L- or half-section, theT-section, and the Pi-section configurations. Theseconfigurations are shown in figure 10-14. For a morein-depth discussion on the various filters discussed inthis chapter, you should refer to NAVSHIPS0967-000-0120, (EIMB), section 4.becomes a high impedance. The impedance of such aresonant lead becomes greater without limit as the dcresistance becomes lower. Multiple bonding usingthe same length of bonding jumper increases theimpedance at the resonant frequency, but also tends tosharpen the high-impedance area around the resonantfrequency. This sharpening is done by the rapid fallof impedance on each side of resonance.PURPOSES OF BONDINGBonding must be designed and executed to obtainthe following results:l Protect the aircraft and personnel from hazardsassociated with lightning discharges. Provide power-current and fault-current returnpathsl Provide sufficient homogeneity and stability ofconductivity for RF currents affecting transmissionand reception. Prevent development of ac potentials onconducting frames, enclosures, cables of electricaland electronic equipment, and on conducting objectsadjacent to unshielded transmitting antenna lead-insBONDINGLearning Objective: Identify purposes andtechniques of bonding.Aircraft electrical bonding is defined as theprocess of obtaining the necessary electricalconductivity between all the metallic component partsof the aircraft. Bonding successfully brings all itemsof empennage and internal conduction objects toessentially the same dc voltage level appearing on thebasic structure of the fuselage. However, bonding forradio frequencies is not quite so simple. Only directbonding between affected components canaccomplish the desired results at all frequencies.Only when direct bonding is impossible oroperationally impracticable should bonding jumpersbe used. Regardless of its dc resistance, any length ofconductor has inductive reactance that increasesdirectly with frequency. At a frequency for which thelength of a bond is a quarter wavelength, the bondFigure 10-14.-Examples of band-reject filter circuits10-14
. Protect personnel from the shock hazardresulting from equipment that experiences an internalpower failurel Prevent the accumulation of static charges thatcould produce radio interference or be an explosionhazard due to periodic spark dischargeBONDING FOR LIGHTNINGPROTECTIONClose-riveted skin construction that divides anylightning current over a number of rivets is consideredadequately bonded to provide a lightning dischargecurrent path. Control surfaces and flaps should havea bonding jumper across each hinge. To protect thecontrol cables and levers, additional jumpers shouldbe connected between the control surface and thestructure. The length of a discharge path through thecontrol system should be at least 10 times the lengthof the path of the jumper or jumpers.All external electrically isolated conductingobjects (except antennas) should have a bondingjumper to the aircraft to ensure a low-impedance path.This is done so the voltage drop developed across thejumper system by the lightning discharge isminimized. The bonding jumpers must be kept asshort as possible. When practical, a bonding jumpershould not exceed 3 inches.ELECTROSTATIC DISCHARGELearning Objective: Recognize the hazardsto electrostatic discharge-sensitive devices,to include proper handling and packagingtechniques.The sensitivity of electronic devices andcomponents to electrostatic discharge (ESD) hasrecently become clear through use, testing, and failureanalysis. The construction and design features ofcurrent microtechnology have resulted in devicesbeing destroyed or damaged by ESD voltages as lowas 20 volts. The trend in this technology is towardgreater complexity, increased packaging density, andthinner dielectrics between active elements. Thistrend will result in devices even more sensitive toESD.Various devices and components are susceptibleto damage by electrostatic voltage levels commonlygenerated in production, test, operation, and bymaintenance personnel. The devices and componentsinclude the following:. All microelectronic and most semiconductordevices, except various power diodes and transistors. Thick and thin film resistors, chips and hybriddevices, and crystalsAll subassemblies, assemblies, and equipment containingthese components/devices without adequateprotective circuitry are ESD sensitive (ESDS).You can protect ESDS items by implementingsimple, low-cost ESD controls. Lack of implementationhas resulted in high repair costs, excessiveequipment downtime, and reduced equipmenteffectiveness.The operational characteristics of a system maynot normally show these failures. However, underinternal built-in-test monitoring in a digitalapplication, they become pronounced. For example,the system functions normally on the ground; but,when placed in an operational environment, adamaged PN junction might further degrade, causingits failure. Normal examination of these parts will notdetect the damage unless you use a curve tracer tomeasure the signal rise and fall times, or check theparts for reverse leakage current.STATIC ELECTRICITYStatic electricity is electrical energy at rest. Somesubstances readily give up electrons while othersaccumulate excessive electrons. When twosubstances are rubbed together, separated or flowrelative to one another (such as gas or liquid over asolid), one substance becomes negatively charged andthe other positively charged. An electrostatic field orlines of force emanate between a charged object to anobject at a different electrostatic potential or ground.Objects entering this field will receive a charge byinduction.The capacitance of the charged object relative toanother object or ground also has an effect on thefield. If the capacitance is reduced, there is an inverselinear increase in voltage, since the charge must beconserved. As the capacitance decreases, the voltageincreases until a discharge occurs via an arc.10-15
Causes of Static ElectricityGeneration of static electricity on an object byrubbing is known as the triboelectric effect. Thefollowing is a list of substances in the triboelecticseries. The list is arranged in such an order that whenany two substances in the list contact one another andthen separate, the substance higher on the list assumesa positive charge.AcetateGlassHuman hairNylonWoolFurAluminumPolyesterPaperCottonWoodSteelAcetate fiberNickel, copper, silverBrass, stainless steelRubberAcrylicPolystyrene foamPolyurethane foamSaranPolyethylenePolypropylenePVC (vinyl)KEL FTeflon ®The size of an electrostatic charge on twodifferent materials is proportional to the separation ofthe two materials. Electrostatic voltage levelsgenerated by nonconductors can be extremely high.However, air will slowly dissipate the charge to anearby conductor or ground. The more moisture inthe air, the faster a charge will dissipate. Table 10-1shows typical measured charges generated bypersonnel in a manufacturing facility. Note thedecrease in generated voltage with the increase inhumidity levels of the surrounding air.Table 10-1.-Typical Measured Electrostatic VoltagesMEANS OF STATIC GENERATIONVOLTAGE LEVELS @ RELATIVE HUMIDITYLOW 10-20% HIGH 65-90%WALKING ACROSS CARPET 35,000 1,500WALKING OVER VINYL FLOOR 12,000 250WORKER AT BENCH 6,000 100VINYL ENVELOPES FOR WORK 7,000 600INSTRUCTIONSCOMMON POLY BAG PICKED UP FROM 20,000 1,200BENCHWORK CHAIR PADDED WITH URETHANE 18,000 1,500FOAM10-16
Effects of Static ElectricityThe effects of ESD are not recognized. Failuresdue to ESD are often misanalyzed as being caused byelectrical overstress due to transients other than static.Many failures, often classified as other, random,unknown, etc., are actually caused by ESD.Misclassification of the defect is often caused by notperforming failure analysis to the proper depth.COMPONENT SUSCEPTIBILITYAll solid-state devices, except for various powertransistors and diodes, are susceptible to damage bydischarging electrostatic voltages. The discharge mayoccur across their terminals or through subjection ofthese devices to electrostatic fields.LATENT FAILURE MECHANISMSThe ESD overstress can produce a dielectricbreakdown of a self-healing nature when the currentis unlimited. When this occurs, the device may retestgood, but contain a hole in the gate oxide. With use,metal will eventually migrate through the puncture,resulting in a shorting of this oxide layer.Another structure mechanism involves highlylimited current dielectric breakdown from which noapparent damage is done. However, this reduces thevoltage at which subsequent breakdown occurs to aslow as one-third of the original breakdown value.ESD damage can result in a lowered damagethreshold at which a subsequent lower voltage ESDwill cause further degradation or a functional failure.ESD ELIMINATIONThe heart of an ESD control program is theESD-protected work area and ESD grounded workstation. When you handle an ESD-sensitive deviceoutside of its ESD protective packaging, you need toprovide a means to reduce generated electrostaticvoltages below the levels at which the item issensitive. The greater the margin between the level atwhich the generated voltages are limited and theESDS item sensitivity level, the greater theprobability of protecting that item.PRIME GENERATORSAll common plastics and other generators shouldbe prohibited in the ESD protected work area.Carpeting should also be prohibited. If you must usecarpet, it should be of a permanently antistatic type.Perform weekly static voltage monitoring wherecarpeting is in use.PERSONAL APPAREL AND GROUNDINGAn essential part of the ESD program isgrounding personnel and their apparel when handlingESDS material. Means of doing this are described inthis section.SmocksPersonnel handling ESDS items should wear longsleeve, ESD-protective smocks, short sleeve shirts orblouses, and ESD-protective gauntlets banded to thebare wrist and extending toward the elbow. If theseitems are not available, use other antistatic material(such as cotton) that will cover sections of the bodythat could contact an ESDS item during handling.Personnel Ground StrapsPersonnel ground straps should have a minimumresistance of 250,000 ohms. Based upon limitingleakage currents to personnel to 5 milliamperes, thisresistance will protect personnel from shock fromvoltages up to 125 volts RMS. The wrist, leg, orankle bracelet end of the ground strap should havesome metal contact with the skin. Bracelets madecompletely of carbon-impregnated plastic mayburnish around the area in contact with the skin,resulting in too high an impedance to ground.ESD-PROTECTIVE MATERIALSThere are two basic types of ESD-protectivematerial—conductive and antistatic. Conductivematerials protect ESD devices from static dischargesand electromagnetic fields. Antistatic material is anonstatic generating material. Other than notgenerating static, antistatic material offers no otherprotection to an ESD device.Conductive ESD-Protective MaterialsConductive ESD-protective materials consist ofmetal, metal-coated, and metal-impregnatedmaterials. The most common conductive materialsused for ESD protection are steel, aluminum, andcarbon-impregnated polyethylene and nylon. Thelatter two are opaque, black, flexible, heat sealable,electrically conductive plastics. These plastics are10-17
composed of carbon particles, impregnated in theplastic, that provide volume conductivity throughoutthe material.Antistatic ESD-Protective MaterialsAntistatic materials are normally plastic-typematerials (such as polyethylene, polyolefin,polyurethane, and nylon) that are impregnated with anantistatic substance. This antistatic migrates to thesurface and combines with the humidity in the air toform a conductive sweat layer on the surface. Thislayer is invisible, and although highly resistive, it isamply conductive to prevent the buildup ofelectrostatic charges by triboelectric methods innormal handling. Simply stated, the primary asset ofan antistatic material is that it will not generate acharge on its surface. However, this material won’tprotect an enclosed ESD device if it comes intocontact with a charged surface.This material is of a pink tint—a symbol of itsbeing antistatic. Antistatic materials are for innerwrappackaging. However, antistatic trays, vials,carriers, boxes, etc., are not used unless componentsand/or assemblies are wrapped in conductivepackaging.Hybrid ESD-Protective BagsLamination of different ESD-protective materialis available. This combination of conductive andantistatic material provides the advantage of bothtypes in a single bag.ESDS DEVICE HANDLINGThe following are general guidelines applicableto the handling of ESDS devices:l Make sure that all containers, tools, testequipment, and fixtures used in ESD-protected areasare grounded before and during use. This may bedone either directly or by contact with a groundedsurface.l Personnel handling ESDS items must avoidphysical activities that are friction-producing in thevicinity of ESDS items. Some examples are puttingon or removing smocks, wiping feet, and slidingobjects over surfaces.. Personnel handling ESDS items must wearcotton smocks and/or other antistatically treatedclothing.. Avoid the use or presence of plastics, synthetictextiles, rubber, finished wood, vinyls, and otherstatic-generating materials (table 10-1) where ESDSitems are handled out of their ESD-protectivepackaging.l Place the ESD-protective material containingthe ESDS item on a grounded work bench surface toremove any charge before opening the packagingmaterial.. Personnel must attach personnel groundingstraps to ground themselves before removing ESDSitems from their protective packaging.. Remove ESDS items from ESD-protectivepackaging with fingers or metal grasping tool onlyafter grounding, and place on the ESD-groundedwork bench surface.. Make periodic electrostatic measurements atall ESD-protected areas. This assures theESD-protective properties of the work station and allequipment contained have not degraded.. Perform periodic continuity checks ofpersonnel ground straps, ESD-grounded work stationsurfaces, conductive floor mats, and other connectionsto ground. Perform this check with amegohmmeter to make sure grounding resistivityrequirements are met.ESDS DEVICE PACKAGINGBefore an ESDS item leaves an ESD-protectedarea, package the item in one of the following ESDprotective materials:l Ensure shorting bars, clips, or noncorrectiveconductive materials are correctly inserted in or on allterminals or connectors.l Package ESDS items in an inner wrap, of typeII material conforming to MIL-B-81705, and an outerwrap of type I material conforming to MIL-B-81 705.You may use a laminated bag instead of the aboveprovided it meets the requirements of MIL-B-81705.Cushion-wrap the item with electrostatic-freematerial conforming to PPP-C-1842, type III, style A.Place the cushioned item into a barrier bag fabricatedfrom MIL-C-131 and heat-seal closed, method 1A-8.Place the wrapped, cushioned, or pouched ESDS itemin bags conforming to MIL-B-117, type I, class F,style I. Mark the packaged unit with the ESD symboland caution as shown in figure 10-15.10-18
s7.P\/ tCAUTIONSENSlTlVE ELECTRONIC DEVICESDO NOT SHIP OR STORE NEAR STRONGELECTROSTATIC, ELECTROMAGNETIC,MAGNETIC, OR RADlOACflVE FIELDSCAUTIONCONTENTS SUBJECT TO DAMAGE BYSTATIC ELECTRICITYDO NOT OPENUNLESS APPROVED STATIC CONTROLPRECAUTIONS ARE OBSEAVEDCAUTION - - THIS EQUIPMENT CONTAINS ASSEMBLIESSUBJECT TO DAMAGE BY STATIC ELECTRICITY. USEAPPROVED GROUNDING PROCEDURES BEFORE TOUCH.ING, REMOVING, OR INSERTING PRINTED WIRING AS-SEMBLIES.Figure 10.lbESDS markings.REVIEW QUESTIONS Q5.Ql. What causes internally generated noise in areceiver?Q2. Atmospheric static produces what indicationon a visual output device?Q3. What is the definition of a nonlinear device?Q4. What is the crossover frequency of a 4uF Q8.capacitor with 2-inch leads?Q6.Q7.A bonding jumper should not exceed howmany inches in length?What problems can arise if the ESD programis not implemented?What voltage level can be built up by walkingacross a carpet in low humidity?What are the two types of ESD-protectivematerial?10.19
APPENDIX 1REFERENCES USED TODEVELOP THE TRAMANNOTE: Although the following references were current when thisTRAMAN was written, their continued currency cannot be assured. Therefore,you need to be sure that you are studying the latest revision.Chapter 1Communication, TACAN, ADF Electronic Altimeter and IFF Systems, NavyModel F/TF-18A 160775 thru 161251, A1-F18AA-600-100, <strong>Naval</strong> AirSystems Command, Washington, D.C., 1 March 1980; Change 2, 15 October1980.Electronic Systems, Navy Model EA-6A Aircraft, NAVAIR 01-85ADB-2-3,<strong>Naval</strong> Air Systems Command, Washington, D.C., 15 April 1980; Change 3, 1March 1991.Integrated Navigation/Communication Station, Navy Model P-3C Aircraft,NAVAIR 01-75PAC-2-10, <strong>Naval</strong> Air Systems Command, Washington, D.C.,15 September 1991; Rapid Action Change 4, 15 June 1992.Navy Electricity and <strong>Electronics</strong> Training Series (NEETS), Module 17, RadioFrequency Communication Principles, NAVEDTRA 172-17-00-84, <strong>Naval</strong>Education and Training Program Development Center, Pensacola, Fla., 1984.Chapter 2Air Navigation, NAVAIR 00-80V-49, Chapters 1,2,4,7, 18, and 19, Office of theChief of <strong>Naval</strong> Operations, Washington D.C., 15 March 1983.Principles of Operation - Avionic Systems - Nonacoustic Sensors, ElectronicCountermeasures, Navigation, Automatic Flight Control andCommunications, Navy Model S-3A, NAVAIR 01-S3AAA-2-2.14, <strong>Naval</strong> AirSystems Command, Washington, D.C., 15 April 1979; Change 7, 15 April1989.Electronic Systems, Navy Model EA-6A Aircraft, NAVAIR 01-85ADB-2-3,<strong>Naval</strong> Air Systems Command, Washington, D.C., 15 April 1980; Change 3, 1March 1991.<strong>Electronics</strong> Installation and Maintenance Book (EIMB), General, NAVSEASE000-00-EIM-100, <strong>Naval</strong> Sea Systems Command, Washington D.C., 1983.Integrated Navigation/Communication Station, Navy Model P-3C Aircraft,NAVAIR 01-75PAC-2-10, <strong>Naval</strong> Air Systems Command, Washington, D.C.,15 September 1991; Rapid Action Change 4, 15 June 1992.Principles of Operation, Navigation Systems, Navy Models F-14A and F-14A(PLUS) Aircraft, NAVAIR 01-F14AAA-2-2-10, <strong>Naval</strong> Air SystemsCommand, Washington, D.C., 16 January 1989.AI-1
Chapter 3Principles of Operation - Avionic System - Nonacoustic Sensors, ElectronicCountermeasures, Navigation, Automatic Flight Control andCommunications, Navy Model S-3A, NAVAIR 01-S3AAA-2-2.14, <strong>Naval</strong> AirSystems Command, Washington, D.C., 15 April 1979; Change 7, 15 April1989.Communication, TACAN, ADE Electronic Altimeter and IFF Systems, NavyModel F/TF-18A 160775 thru 161251, A1-F18AA-600-100, <strong>Naval</strong> AirSystems Command, Washington, D.C., 1 March 1980; Change 2, 15 October1980.Integrated Sensor Station 3, Navy Models P-3C Aircraft, NAVAIR01-75PAC-2-8, <strong>Naval</strong> Air Systems Command, Washington, D.C., 1 October1984; Change 3, 1 March 1991.Chapter 4NATOPS Flight Manual S-3A Aircraft, NAVAIR 01-S3AAA-1, <strong>Naval</strong> AirSystem Command, Washington D.C., September 1982; Change 1, January1983.General Information and Principles of Operation, Volume II, Avionics, NavyModel SH-3H, NAVAIR 01-230HLH-2-1.2, <strong>Naval</strong> Air Systems Command,Washington, D.C., 1 November 1989; Change 7, 15 February 1992.Integrated Sensor Stations 1 and 2 - Update III, Navy Model P-3C Aircraft,NAVAIR 01-75PAC-2-15, <strong>Naval</strong> Air Systems Command, Washington, D.C.,1 April 1985; Change 5, 15 January 1989.Chapter 5Attitude Heading Reference System, AN/ASN-50, NAVAIR 05-35LAA-1, <strong>Naval</strong>Air Systems Command, Washington D.C., January 1984.Principles of Operation - Avionics Systems - Data Processing Display andControl Acoustic Processing, Armament and Stores Control, NAVAIR01-S3AAA-2-2.13, <strong>Naval</strong> Air System Command, Washington D.C.,February 1976, Change 5, December 1987.NATOPS Flight Manual S-3A Aircraft, NAVAIR 01-S3AAA-1, <strong>Naval</strong> AirSystem Command, Washington D.C., September 1982; Change 1, January1983.Integrated Flight Station Systems, Navy Model P-3C Aircraft, NAVAIR01-75PAC-2-9, <strong>Naval</strong> Air Systems Command, Washington, D.C., 31 October1984; Change 9, 1 February 1991.Chapter 6Forward Linking Infrared System, Navy Model F/TF-18A 160782 and 160785thru 161251, A1-F18AA-744-100, <strong>Naval</strong> Air Systems Command,Washington, D.C., 1 February 1981.Integrated Sensor Station 3, Navy Models P-3C Aircraft, NAVAIR01-75PAC-2-8, <strong>Naval</strong> Air Systems Command, Washington, D.C., 1 October1984; Rapid Action Change 9, 9 June 1988.AI-2
Chapter 7Airborne Weapons/Stores Loading Manual, Navy Model F-14A/A+ Aircraft,NAVAIR 01-F14AAA-75, <strong>Naval</strong> Air Systems Command, Washington, D.C.,1 July 1990; Rapid Action Change 23, 1 November 1990.Principles of Operation, Instruments and Displays, Navy Models F-14A andF-14A (PLUS) Aircraft, NAVAIR 01-F14AAA-2-2-8, <strong>Naval</strong> Air SystemsCommand, Washington, D.C., 16 January 1989.LAMPS MK III Weapon System Manual, A1-H60BB-NFM-010, <strong>Naval</strong> AirSystems Command, Washington, D.C., 1 March 1992.Chapter 8Navy Electricity and <strong>Electronics</strong> Training Series (NEETS), Module 22,Introduction to Digital Computers, NAVEDTRA B72-22-00-88, <strong>Naval</strong>Education and Training Program Management Support Activity, Pensacola,Fla., 1988Chapter 9Automatic Flight Control Systems AN/ASW-16 and AN/ASW-42, Navy ModelsA-6E and KA-6D Aircraft, NAVAIR 01-85 ADA-2-5.1, <strong>Naval</strong> Air SystemsCommand, Washington, D.C., 15 July 1974; Rapid Action Change 2, 15 May1991.Chapter 10<strong>Electronics</strong> Installation and Maintenance Book (EIMB), General, NAVSEASE000-00-EIM-100, <strong>Naval</strong> Sea Systems Command, Washington D.C., 1983.<strong>Electronics</strong> Installation and Maintenance Book (EIMB), General Maintenance,NAVSEA SE000-00-EIM-160, <strong>Naval</strong> Sea Systems Command, WashingtonD.C., 1981.Installation Practices Aircraft Electric and Electronic Wiring, NAVAIR01-1A-505, <strong>Naval</strong> Air Systems Command, Washington D.C., 1 December1987.AI-3
APPENDIX IIANSWERS TO REVIEWQUESTIONSCHAPTER 1A1.A2.A3.A4.A5.A6.A7.A8.A9.A10.A11.A12.A13.Radio.3 GHz to 30 GHzThree.Manchester word encoding/decoding.116.000 to 155.975 MHz20.An interface fault.7.9000 to 9.1000 MHz and 18.9000 to 20.1000 MHzTo protect the radio if lightning strikes the long-wire antenna.HF-1, HF-2, and UHF-2.The NAV/COMM.The TTY signal data converter.Communications Interface No. 1.CHAPTER 2A1.A2.A3.A4.A5.A6.A7.A8.A9.A10.A11.The position of one point in space relative to another without referenceto the distance between them.12 miles.Parallels of latitudes and meridians of longitudes.The actual height that an aircraft is above the surface of the earth.One.20 to 5,000 feet.It automatically resets.ADF mode, loop mode, and antenna mode.RECEIVE mode.10.2 kHz, 11.3 kHz and 13.6 kHz.Drift; angle and ground speed.AII-1
CHAPTER 3A1.A2.A3.A4.A5.A6.A7.A8.A9.A10.A11.A12.A13.A14.Airborne X-band.20 degrees down to 10 degrees up.Scan switch.Four.6 RPM.Three (search, fire control, and bomb director).3,500 yards.Jizzle.Greater than 700 knots.A large X is displayed.1, 2, 3/A, C, and 4.The UHF L-band blade antennas.1030 MHz carrier.The fail light on the control box.CHAPTER 4A1.A2.A3.A4.A5.A6.A7.A8.A9.A10.From the initial letters of SOund, NAvigation and Ranging.The transducerThe salinity, the pressure, and the temperature.It controls the brightness of the cursor.500±5 feet.Oil.A detectable distortion.The magnetic field will change.One.50.CHAPTER 5A1.A2.A3.A4.A5.A6.A7.A8.HSI.No.A fixed reference mark used to read the heading on the compass card.Head-Up Display.Tactical Display System.A transparent mirror positioned directly in front of the pilot at eye level.Seven.Five.AII-2
A9. The ADPA10. A pickup device.A11. The breaking up of the scene into minute elements and using theseelements in an orderly manner.A12. Four.CHAPTER 6A1.A2.A3.A4.A5.A6.A7.A8.A9.A10.A11.Between wavelengths 0.72 and 1,000 micrometers.They differ only in wavelength and frequency of oscillation.About 0.98 on a scale of 0 to 1.Photographic film.Each detector element requires a supporting electronic circuit.One element width.Passive.180.Three are connected in a wye configuration, and three are connected in adelta configuration.The position mode, the FWD mode, the computer track mode, and themanual track mode.False. The status light and the picture are the only indications of aproperly functioning indicator.CHAPTER 7A1.A2.A3.A4.A5.A6.A7.A8.False.Notify the appropriate person(s).It symbolizes that the weapon station is loaded, ready, and selected.The armament safety override switch.AIM-7 missiles.Eight.52.25.CHAPTER 8A1. Cathode-ray tubes, transistors, microchips, and printed circuit cards.A2. False.A3. Binary, octal, decimal equivalents.A4. Control unit, arithmetic-logic unit, and internal data storage unit.A5. Coincident-current technique.A6. 12.7 to 50.8 centimeters (5 to 20 inches).AII-3
A7. Linking two or more computers together.A8. Speed versus power dissipation.A9. The use of subroutines.A10. Statement, analysis, flow diagram, encoding, debugging, anddocumentation.CHAPTER 9A1. False.A2. Automatic, semiautomatic, and manual.A3. As the aircraft passes through the acquisition window.A4. No, the pilot can continue in any other mode.CHAPTER 10A1.A2.A3.A4.A5.A6.A7.A8.Circuit deficiencies.Grass.A conductor semiconductor or solid-state device whose resistance orimpedance varies with the voltage applied across it.0.41 MHz3 inches.High repair costs, excessive equipment downtime, and reducedequipment effectiveness.35,000 volts.Conductive and antistatic.AII-4
APPENDIX IIIFORMULASAIII-1
FORMULASAIII-2
AIII-3
AIII-4
BRIDGE CIRCUIT CONVERSION FORMULASAIII-5
Comparison of Units in Electric and Magnetic CircuitsForce, . . . . . . . . . . . . . .Flow . . . . . . . . . . . . . . .Opposition . . . . . . . . . .Electric circuitVolt, E, or emfAmpere, IOhms, RMagnetic circuitGilberts, F, or mmfFlux, φ, in maxwellsReluctance, RLaw . . . . . . . . . . . . . . . .Ohm’s law, I=;Rowland’s law, φ = ~Intensity of force . . . .Density . . . . . . . . . . . . .Volts per cm of length.Current density—forexample, amperes percm 2 .H = 1.257INgilbertsL ’per centimeter of length.Flux density—forexample, lines per cm 2or gausses.AIII-6
INDEXAAcoustic System AN/UYS-1, 4-27Control Indicator C-11104/UYS-1, 4-28operating principles, 4-27Power Supply PP-7467/UYS-1, 4-27Spectrum Analyzer TS-4008/UYS-1, 4-27Airborne navigation systems, 2-7automatic direction finder (ADF), 2-12Doppler, 2-18loran, 2-15omega, 2-16pressure altimeters, 2-8radar altimeter, 2-10radar altimeter warning set (RAWS), 2-11TACAN, 2-13Airborne sonar system, 4-9azimuth and range indicator, 4-10bathythermographic mode of operation, 4-14bearing and range indicator, 4-10cable assembly and reel, 4-10cable reeling machine, 4-11communication mode of operation, 4-14data computer, 4-14dome control, 4-10echo-ranging mode of operation, 4-14hydrophore, 4-11passive mode of operation, 4-14projector, 4-11receiver, 4-13recorder aspect mode of operation, 4-15recorder range mode of operation, 4-15Recorder RO-358/ASQ-13A, 4-11recorder test mode, 4-15test mode, 4-14transmitter, 4-13Altimeter errors, 2-9hysteresis, 2-9installation/position, 2-9mechanical, 2-9reversal, 2-9scale, 2-9Altimeters, 2-7counter-drum-pointer, 2-9counter-pointer, 2-8errors, types of, 2-9pressure, 2-8radar, 2-10Altitudes, 2-7absolute altitude, 2-8calibrated altitude, 2-8density altitude, 2-8indicated altitude, 2-8pressure altitude, 2-8standard datum plane, 2-7true altitude, 2-8Antisubmarine warfare, 4-1acoustic system, 4-27airborne sonar system, 4-9MAD recorder, 4-24magnetic anomaly detection, 4-15magnetic anomaly detection set, 4-21magnetic anomaly detection system, 4-20magnetic compensator group, 4-22selector control group, 4-23sonar principles, 4-1sonobuoys, 4-24sonobuoy receivers, 4-27submarine anomaly detection (SAD) group, 4-22INDEX-1
Antisubmarine warfare weapons systems, 7-11basic ASW weapons systems, 7-11fixed-wing kill store systems, 7-17fixed-wing release and control system, 7-18fixed-wing search store systems, 7-13helicopter kill store system, 7-18helicopter search store sytems, 7-14Automatic carrier landing system, 9-1block diagram, 9-2components, 9-1principles of operation, 9-3safety provisions, 9-5Automatic carrier landing system components, 9-1Approach Indexer 128AV653- 1,9-3Approach Power Compensator AN/ASN-54, 9-3Attitude Reference Indicator ID-1791/,4, 9-3Automatic Flight Control System AN/ASW-42,9-1Digital Data Communication Set AN/ASW-25B,9-1Discrete Message Indicator 1284V66836, 9-3Instrument Landing System AN/SPN-41, 9-1Landing Control Central System AN/SPN-42, 9-2Radar Beacon AN/APN-154B, 9-3Receiving-Decoding Group AN/ARA-63, 9-1warning indexer panel, 9-3Automatic carrier landing system operation, 9-3landing sequence, 9-4mode I landing operation, 9-4Automatic direction finder (ADF), 2-12ADF mode of operation, 2-12antenna mode of operation, 2-12Control Panel C-6899/ARN-83, 2-12Loop Antenna AS-1863/ARN-83, 2-12loop mode of operation, 2-12Receiver R-1391/ARN-83, 2-12sense antenna, 2-12BBearing-distance-heading indicator (BDHI), 5-4functions, 5-5indicator parts, 5-4Block diagramsAPS-115 signal flow, 3-8basic television system, 5-17data link, 1-21DIFAR sonobuoy, 4-26digital data processor, 8-3FLIR azimuth drive, 6-18FLIR control servomechanism bite, 6-22FLIR elevation drive, 6-19FLIR positioning/stabilization, 6-13FLIR power supply-video converter BITE, 6-17FLIR receiver-converter BITE, 6-14FLIR receiver-converter heat exchanger, 6-12FLIR system, 6-8FLIR TTSC, 6-24FLIR video indicator, 6-27FLIR video processing, 6-15heads-up display, 5-7HF radio system, 1-19tactical display system interface, 5-17teletype, 1-24Trainer 11D13A, 3-9UHF radio system, 1-15Bonding, 10-14lightning protection, 10-15purposes, 10-14CCamera tubes, 5-22image isocon, 5-23image orthicon, 5-22plumbicon, 5-25secondary electron conduction (SEC), 5-25vidicon, 5-24INDEX-2
Computer input/output units, 8-9devices, 8-11input devices, 8-11output devices, 8-12parallel transmission, 8-10parallel versus serial transmissions, 8-10serial transmission, 8-11Computer programming fundamentals, 8-13executive routines, 8-14flow charting, 8-15jump and return jump instructions, 8-14maintenance programs, 8-15program construction, 8-15subroutines, 8-14Computers, 8-1applications, 8-2integrated circuit technology, 8-12makeup, 8-1peripheral avionics systems, 8-16programming fundamentals, 8-13types, 8-2Computer types, 8-2analog, 8-2digital, 8-2general-purpose, 8-3special-purpose, 8-3DData link system, 1-20block diagram, 1-21comm interface No. 2, 1-21Control-Monitor Panel C7790/ACQ-5, 1-21Converter-Control CV-2528/ACQ-5, 1-20modes of operation, 1-22Power Supply PP-6140/ACQ-5, 1-21terms, 1-22Digital computers, 8-2data processor, 8-3input/output, 8-9operation, 8-3Digital data processor, 8-3arithmetic-logic unit, 8-5block diagram, 8-3control unit, 8-4internal data storage unit, 8-5Digital data storage, 8-5magnetic cores, 8-6magnetic disks, 8-8magnetic drums, 8-7magnetic tapes, 8-8semiconductor memories, 8-6thin film, 8-7Doppler, 2-18EAntenna AS-1350/APN- 153(V), 2-18Control Indicator C-4418A/APN-153(V), 2-18operational theory, 2-18Receiver Transmitter RT-680A/APN-153(V),2-18test indications, 2-19Electrical noise, 10-3ac generators and motors, 10-3beacons, 10-4coded-pulse equipment, 10-4dc motors, 10-3inverters, 10-4nonlinear elements, 10-5power lines, 10-6propeller systems, 10-5radar, 10-4receiver oscillators, 10-5relays, 10-4thyratrons, 10-4transponders, 10-4INDEX-3
Electrostatic discharge, 10-15component susceptibility, 10-17device handling, 10-18device packaging, 10-18elimination of, 10-17markings, 10-19personal apparel, 10-17personnel ground straps, 10-17prime generators, 10-17protective materials, 10-17static electricity, 10-15Electrostatic discharge program, 10-1bonding, 10-14electrical noise, 10-3electrostatic discharge, 10-15interference coupling, 10-6protective material, 10-17radio interference reduction components, 10-7receiver noise interface, 10-1static electricity, 10-15Electrostatic discharge protective material, 10-17antistatic material, 10-18conductive material, 10-17hybrid bags, 10-18FF-14 aircraft weapon systems, 7-1air combat maneuver (ACM) panel, 7-1AN/AWW-4 fuze function control system, 7-4armament control indicator panel, 7-2armament safety override switch, 7-4basic controls and components, 7-1control stick, 7-3decoy dispensing system, 7-4display control panel, 7-2jettison system, 7-4landing gear handle, 7-3F-14 aircraft weapon systems-ContinuedM61A1 20-mm automatic gun fire controlsystem, 7-4master light control panel, 7-3missile control system, 7-4multiple weapons release system, 7-4F/A-18 aircraft weapon systems, 7-5AGM-65 Maverick system, 7-10AGM-88 Harm system, 7-10AIM-7 Sparrow fire control system, 7-10AIM-9 Sidewinder fire control system, 7-11aircraft controller grip, 7-6AN/ALE-39 decoy dispensing system, 7-11AN/AWW-4 fuze function control system, 7-10AN/AWW-7B data link system, 7-10armament computer, 7-8armament safety override switch, 7-6basic controls and components, 7-5bomb release system, 7-10digital computers, 7-9digital display indicators (DDIs), 7-6ground power control panel, 7-5jettison system, 7-9landing gear control handle, 7-6M61A1 20-mm gun system, 7-11master arm control panel, 7-6rocket firing system, 7-10Walleye guided weapon system, 7-10Fighter aircraft weapon systems, 7-1F-14 aircraft, 7-1F/A-18 aircraft, 7-5Fire control radar, 3-9block diagram, 3-9bomb director mode, 3-10bomb director mode display, 3-15fire control (automatic search) display, 3-12INDEX-4
Fire control radar-Continuedfire control (automatic track) display, 3-14fire control (breakaway) display, 3-15fire control (lock on) display, 3-14fire control (manual search) display, 3-13fire control mode, 3-10operating modes, 3-9search display, 3-11search mode, 3-10system controls, 3-10Fixed-wing kill store systems, 7-17bomb bay system, 7-17P-3C wing launcher assembly, 7-18S-3A pylor/rack assembly, 7-18Fixed-wing release and control system, 7-18automatic mode, 7-19jettison, 7-20manual mode, 7-20operation, 7-19Forward-looking infrared system (FLIR), 6-7azimuth drive block diagram, 6-18azimuth drive computer track mode, 6-20azimuth drive forward mode, 6-20azimuth drive manual track mode, 6-20azimuth drive position mode, 6-19azimuth drive subsystem, 6-19block diagram, 6-8control box, 6-25control servomechanism assembly, 6-18control servomechanism BITE, 6-21control servomechanism BITE block diagram,6-22control servomechanism BITE 1 test, 6-23control servomechanism BITE 2 test, 6-23control servomechanism BITE 3 test, 6-23control servomechanism fault isolate test, 6-21Forward-looking infrared system (FLIR)—Continuedelevation drive block diagram, 6-19elevation drive subsystem, 6-21infrared to composite video conversion, 6-10infrared to video processing, 6-11positioning and stabilization, 6-12positioning/stabilization block diagram, 6-13power supply, 6-14power supply-video converter assembly, 6-14power supply-video converter BITE, 6-17power supply-video converter BITE blockdiagram, 6-17receiver-converter assembly, 6-9receiver-converter BITE, 6-13receiver-converter BITE block diagram, 6-14receiver-converter heat exchanger diagram, 6-12signal optical path, 6-10target track sight control, 6-25target track sight control block diagram, 6-24temperature control, 6-12video indicator, 6-26video indicator block diagram, 6-27video processing, 6-14video processing block diagram, 6-15Frequency band usage, 1-2Hfrequency spectrum, 1-2MF and HF band, 1-2VHF and UHF band, 1-2VLF and LF band, 1-2Heading indicators, 5-1bearing-distance-heading indicator (BDHI), 5-4horizontal situation indicator (HSI), 5-1INDEX-5
Heads-up display (HUD), 5-5air-to-air mode of operation, 5-13air-to-ground mode of operation, 5-14analog-to-digital conversion mode, 5-9BITE functions, 5-10block diagram, 5-7circle mode, 5-81cruise mode of operation, 5-13declutter, 5-10deflection module, 5-10digital computer, 5-7display unit, 5-9input receivers, 5-6landing mode of operation, 5-14line mode, 5-8optical module, 5-9signal data processor, 5-6symbol generator, 5-7symbology, 5-10takeoff mode of operation, 5-13video module, 5-9Helicopter search store sytems, 7-14SH-3 helicopter sonobuoy launcher, 7-16SH-60 helicopter sonobuoy launcher, 7-16HF communications, 1-16antenna, 1-18block diagram, 1-19Control Box C-9245/ARC- 161, 1-17Coupler CU-2070/ARC, 1-18lightning arrester, 1-18receive function, 1-19Receiver-Transmitter RT-1000/ARC-161, 1-17Remote Control Unit TSEC/KY-75, 1-19RF Amplifier AM-6561/ARC-161, 1-17Security Unit TSEC/KY-75, 1-18transmit function, 1-19Horizontal situation indicator (HSI), 5-1control box, Copilot A279, 5-2control box, NAV/COMM A309, 5-3control box, Pilot A280, 5-2Indicator ID-1540/A, 5-1system description, 5-4IIFF systems, 3-15interrogator set, 3-20transponder set, 3-15Indicators, 5-1bearing-distance-heading indicator (BDHI), 5-4heading indicators, 5-1heads-up display (HUD), 5-5horizontal situation indicator (HSI), 5-1tactical display system (non-bud) (TDS), 5-15Infrared, 6-1detectors, 6-4foward-looking infrared system (FLIR), 6-7imaging system, 6-5optics, 6-4radiation, 6-3thermal imaging, 6-1Infrared detectors, 6-4elemental detectors, 6-4imaging detectors, 6-4photon effect, 6-5thermal effect, 6-5Infrared imaging system, 6-5detector array, 6-5front end optics, 6-7image processing, 6-7refrigeration system, 6-7scene dissection, 6-6single detector, 6-6INDEX-6
Infrared radiation, 6-3sources, 6-3Intercommunication system, 1-3Control Panel C-8760/AI, 1-3Control Panel LS-602/AI, 1-4Converter-Interconnecting Box CV-3048, 1-4Crew ICS Panel LS-601/AI, 1-4indicators, 1-5Manchester word decoding, 1-7Manchester word encoding, 1-6multiplex transmission, 1-8roll call, 1-8signal interfaces, 1-4word format, 1-5Interference coupling, 10-6complex coupling, 10-7conductive coupling, 10-6inductive-capacitive coupling, 10-7inductive-magnetic coupling, 10-6radiation coupling, 10-7Integrated circuit technology, 8-12characteristics, 8-13classifications, 8-12Interrogator set, 3-20Antema AS-2719/AP, 3-20Computer KIR-1A/TSEC, 3-21Control Box C-7383/APX-76A(V), 3-20Electronic Synchronizer SN-416A/APX-76A(V),3-21mode 4 transmission, 3-22modes 1, 2, and 3/A transmission, 3-21performance monitoring, 3-23Receiver-Transmitter3-21reception, 3-22RT-868A/APX-76A(V),Switch Amplifier SA-1568A/APX-76A(V), 3-21LLoran, 2-15MControl Box C-6604/ARN-81, 2-15Indicator IP-796/ARN-81, 2-15Receiver R-1336/ARN-81, 2-15system function, 2-15Mad Recorder RO-32, 4-24Magnetic anomaly detection, 4-15anomaly strength, 4-17compensation for noise, 4-19dc circuit noise, 4-18magnetic anomaly, 4-15maneuver noise, 4-18submarine anomaly, 4-17Magnetic anomaly detection set, 4-21Amplifier Power Supply AM-4535, 4-21Control Box C-6983, 4-21Magnetic Detector DT-323, 4-21Magnetic anomaly detection system, 4-20MAD Recorder RO-32, 4-24Magnetic Anomaly Detection Set AN/ASQ-81,4-21Magnetic Compensator Group AN/ASA-65, 4-22Selector Control Group AN/ASA-71, 4-23Submarine Anomaly Detection GroupAN/ASA-64, 4-22Magnetic compensator group, 4-22compensation coils, 4-23Control Indicator C-8935, 4-22Electronic Control Amplifier AM-6459, 4-22Magnetic Field Computer CP-1390,4-23Magnetic Field Indicator ID-2254, 4-23Magnetometer Assembly DT-355, 4-22INDEX-7
NNavigation basics, 2-1airborne navigation, 2-7altitudes, 2-7compass rose, 2-5dead reckoning, 2-6direction, 2-5distance, 2-5earth’s size and shape, 2-2electronic assisted navigation, 2-6great circles and small circles, 2-2latitude, 2-3longitude, 2-4OOmega, 2-16Antenna Coupler AS-2623/ARN-99(V), 2-17operating frequencies, 2-16operational theory, 2-16Power Control Panel 960767,2-16Receiver-Converter OR-90/ARN-99(V), 2-17PPeripheral avionics systems, 8-16data link, 8-16navigation, 8-16ordnance/weapons, 8-16search/track radar, 8-16RRadar, 3-1fire control radar, 3-9IFF systems, 3-15search radar, 3-1Radar altimeter, 2-10Height Indicator ID-1760A/APN- 194,2-10Low-Altitude Alarm BZ-157A, 2-11low altitude warning light, 2-11Receiver-Transmitter RT-1042/APN-194, 2-11Radar altimeter warning set (RAWS), 2-11Radio communications, 1-1data link system, 1-20frequency band usage, 1-2HF communciations, 1-16intercommunication system (ICS), 1-3teletype system, 1-22types of, 1-1UHF communications, 1-13VHF communications, 1-11Radio communications types, 1-1radiotelegraph, 1-1radiotelephone, 1-1teletypewriter, 1-1Radio interference reduction components, 10-7bandpass filters, 10-13band-rejection filters, 10-14capacitive filter application, 10-10capacitive filtering, ac circuits, 10-10capacitive filtering, switching devices, 10-11capacitors, 10-8capacitors, selection of, 10-10coaxial feedthrough capacitors, 10-8high-pass filters, 10-13inductive-capacitive filters, 10-12low-pass filters, 10-12resistive-capacitive filters, 10-11Receiver noise interference, 10-1atmospheric static, 10-1broadband interference, 10-2cosmic noise, 10-2narrow-band interference, 10-3precipitation static, 10-2INDEX-8
SSearch radar, 3-1Antenna AS-2146/APS-115, 3-5antema characteristics, 3-5Antenna Control Box C-75 11A/APS-115, 3-2antenna elevation parking control, 3-5Antenna Position Programmer MX-7930/APS-115, 3-3Control Panel C-7512/APS-115, 3-5functional description, 3-8Radar Interface Unit (RIU) MX-7974/ASA-69,3-7Radar Scan Converter Control C-7557/ASA-69,3-6Receiver-Transmitter RT-889/APS-115, 3-3signal flow diagram, 3-8transmitter characteristics, 3-4Selector control group, 4-23Control Panel C-7693/ASA-71, 4-23Control Subassembly MX-8109/ASA-71, 4-24Sonar principles, 4-1absorption and scattering, 4-2depth and temperature, 4-4divergence, 4-3Doppler effect, 4-6echo-ranging, 4-1reflection, 4-2refraction, 4-3reverberation, 4-2sound beam speed, 4-3Sonobuoys, 4-24ATAC/DLC buoys, 4-27BT buoys, 4-26CASS buoys, 4-26deployment, 4-24DIC ASS buoys, 4-26DIFAR buoy block diagram, 4-26Sonobuoys–ContinuedDIFAR buoys, 4-25frequency channels, 4-24LOFAR buoys, 4-25markings, 4-25operating life, 4-25operation principles, 4-24RO buoys, 4-26SAR buoys, 4-26water entry and activation, 4-25Sonobuoy Receiver AN/ARR-72, 4-27Static electricity, 10-15causes of, 10-16effects of, 10-17triboelectric effect, 10-16Submarine anomaly detection group, 4-22TTACAN, 2-13air-to-air mode of operation, 2-15Antenna Assembly AS-26281A, 2-14Control Box C-9054/ARN-84, 2-14ground station, 2-13interruptive self-test, 2-15readiness monitoring, 2-15receive mode of operation, 2-14Receiver-Transmitter RT-1022/ARN-84, 2-14RF Transmission Line Switch SA-1818/A, 2-14Signal Data Converter CV-2837/ARN-84, 2-14station identification, 2-13transmit-receive mode of operation, 2-15Tactical display system (non-bud) (TDS), 5-15block diagram, 5-17copilot/cotac display, 5-15display generator unit, 5-15pilot display, 5-15senso ARU display, 5-16system interface, 5-16TACCO and SENSO displays, 5-16INDEX-9
Teletype system, 1-22block diagram, 1-24comm interface No. 1, 1-24Keyboard Transmitter TT-568/AGC-6, 1-23secure interface, 1-24security unit remote control unit, 1-24Security Unit TSEC/KW-7, 1-24signal data converter, 1-23system operation, 1-24teleprinter TT-567, 1-23Television, 5-16basic block diagram, 5-17camera tubes, 5-22fundamentals, 5-17picture tubes, 5-26scanning, 5-18signals, 5-19Television scanning methods, 5-18interlaced, 5-18noninterlaced, 5-18odd-line interlaced, modified sync pulse, 5-22odd-line interlaced, no special sync pulse, 5-21random interlaced, 5-20slow-speed scan, 5-22Television signals, 5-19picture average dc component, 5-20picture blanking pulses, 5-19picture information, 5-19picture synchronizing pulses, 5-20Thermal imaging, 6-2infrared detectors, 6-4infrared optics, 6-4infrared radiation, 6-3Transponder set, 3-15Computer KIT-1A/TSEC, 3-17Control Box C-6280(P)/APX, 3-16emergency function, 3-19IDENT function, 3-19mode 1, 3-19mode 2 and mode 3/A, 3-19mode 4, 3-19mode C, 3-19monitor function, 3-20pulse position for dial settings, 3-18received signals, 3-17Receiver-Transmitter RT-859/APX-72, 3-16RF Transmission Line Switch SA-1769/A, 3-16self-test, 3-20side lobe suppression, 3-17special position indicator, 3-20Test Set TS-1843/APX, 3-17transponder recognition, 3-17transponder response, 3-18X-pulse function, 3-20UUHF communications, 1-13block diagram, 1-15Control Box C-11950/ARC-187, 1-13modes of operation, 1-14operating modes, 1-16Receiver-Transmitter RT-1571/ARC-187, 1-13transmit functions, 1-15UHF-DF operation, 1-15UHF1 receive mode, 1-15UHF2 antenna select panel, 1-14UHF2 receive mode, 1-16voice and data signals, 1-15INDEX-10
VVHF communications, 1-11Antenna 949880, 1-12Control Box C-11067/ARC-197, 1-12receive mode of operation, 1-12Transceiver RT-1397/ARC-197, 1-12VHF communications-Continuedtransmit mode of operation, 1-13WWeapons systems, 7-1antisubmarine warfare aircraft, 7-11fighter aircraft, 7-1INDEX-11
Assignment QuestionsInformation: The text pages that you are to study areprovided at the beginning of the assignment questions.
ASSIGNMENT 1Textbook Assignment: “Communications,” chapter 1, pages 1-1 through 1-25.1-1. Electrical energy used byelectronic communication travels atwhat rate?1. The speed of light2. The speed of sound3. Speed proportionaltransmitter power4. Speed proportionalsensitivity1-2 l What is/are the majordisadvantage(s) of radiotelegraph?toto receiver1. Slow speed only2. Experienced sender only3. Experienced receiver only4. Slow speed and the need forexperienced operators at bothends1-3. What frequency bands wereoriginally used forradiotelegraphy?1. ELF and EHF2. VLF and LF3. MF and HF4. VHF and UHF1-4. What frequency bands have theprominent feature of ionosphericreflection?1. ELF and EHF2. VLF and LF3. MF and HF4. VHF and UHF1-5. VHF and UHF bands are known as whattype of transmission band?1. Over-the-horizon2. Fleet broadcast3. Line-of-sight4. Tactical1-6.1-7.1-8.1-9.1-10.Which of the following functions isNOT performed by the IRC panel?1. Controls VHF radio modes andfunctions2. Controls UHF radio modes andfunctions3. Controls HF radio modes andfunctions4. Displays IFPM status ofcommunication subsystems andcomponentsThe BITE indicator on the IRC panelwill illuminate when a fault isdetected in the1. IRC panel2. UHF1 or UHF2 only3. HF,DTS, or SLU only4. UHF1, UHF2, HF, DTS, or SLUThe LS-601/AI crew control panelsare all identical and operate thesame at each station.1. True2. FalseWhich of the following control(s)is/are located on the LS-602/AIcontrol panel?1. Radio select only2. ICS select only3. Volume control only4. Radio select, ICS select, andvolume controlWhat is the interrogation rate foreach crew ICS panel and IRC by thechange-of-status request from theSLU?1. 25 microseconds2. 25 milliseconds3. 10 microseconds4. 10 milliseconds1
1-11. What will the Sillumination onpanels indicateradio system?indicatorthe crew controlfor a particular1. System off2. System available3. System selected only4. System secure mode selected1-12. In the ICCG, which of the followingcomponents does NOT have identicalbinary coding and decodingcircuits?1. SLU2. IRC3. LS-601/AI4. LS-602/AI1-13. What binary number is recognized bythe SLU as the pilot crew ICS panelin bits 2 through 6 of the 36-bitformat?1. 011102. 010103. 101014. 101101-14. What is bit 36 of the 36-bit formatused for by the ICCG?1.2.3.4.1-15. Inis1.2.3.4.Parity bitEntry bitTag bitFlag bitthe Manchester word format, whatthe clock pulse rate?210 MHz210 kHz120 MHz120 kHz1-16. What component generates the rollcall for the communication system?1. IRC2. SLU3. GPDC4. LS-601/AI1-17.1-18.1-19.1-20.1-21.1-22.The exhale wordbetween the SLUcomponent(s)?is a status wordand which1. IRC only2. LS-601/AI only3. GPDC only4. IRC, LS-601/AI, and GPDCWhich components in the ICCGrespond to more than one roll calladdress?1. IRC and SLU2. IRC and LS-601/AI3. SLU and LS-601/AI4. SLU and LS-602/AIWhich ICCG component recognizes andprocesses the first part of rollcall 1 through the digital controlsection, line receiver, and inhaleword register?1. LS-601/AI2. LS-602/AI3. IRC4. SLUWhich ICCG component generates thesecond part of roll call 1?1. LS-601/AI2. LS-602/AI3. IRC4. SLUWhere are the data and clock pulsesseparated in the SLU?1. Digital control section2. Line receiver3. Input register4. Inhale word registerWhat circuit in the SLU is used toshift data from one buffer toanother once the data is shifted tothe input register in the SLU?1.2.3.4.Valid word registerInhale word registerMaster clockDerived clock2
l-23. What happens in the SLU if theinput word is invalid three times?1. The control register sets theBITE indicator on the SLU2. The status register sets theBITE indicator on the componentthat sent the word3. The status register sets theBITE indicator on the SLU4. The control register sets theBITE indicator on the componentthat sent the wordl-24. When does the IRC/SLU roll callexchange end?1. Last part of roll call 82. First part of roll call 83. First part of roll call 124. Last part of roll call 12I-25. Which CREW ICS panel processes thefirst part of roll call 9?1. TACCO2. SENSO3. Pilot4. Copilotl-26. What is the frequency range of theAN/ARC-l97 VHF transceiver?1. 116.000 to 151.975 Mhz2. 108.000 to 151.975 Mhz3. 116.000 to 151.975 kHz4. 108.000 to 151.975 kHzl-27. What are the microphone andheadphone jacks on theRT-1397/ARC-197 transceiver NOTused for?1. Maintenance2. Normal operation3. Emergency reception4. Emergency transmissionl-28. Whai increments are the frequenciesselectable on the AN/ARC-197?1. Every 1 kKz2. Every 1 MHz3. Every 25 kHz4. Every 25 MHzl-29. What component reduces thecrosstalk between the VHF and UHFsystems?1. VHF antenna2. UHF antenna3. UHF and VHF antenna coaxrouting4. VHF bandpas filterl-30. The VHF transmitter uses a total ofhow many stages of amplification toincrease the output to 20 watts?1. One2. Two3. Three4. Five1-31. Which of the following types ofoperation(s) is/are provided by theAN/ARC-l87 UHF communicationsystem?1. AM only2. FM only3. FSK only4. AM, FM, and FSKl-32. The MEMORY read display onlydisplays the frequency that hasbeen selected by the manualselector switches.1. True2. Falsel-33. The FAULT status indicator on theC-11950/ARC-187 indicates which ofthe following types of fault(s)?1. Receiver transmitter only2. Interface only3. Control box only4. Receiver transmitter,interface, and control boxl-34. What mode of frequency selection onthe C-11950/ARC-187 control boxdisables the guard receiver?1. SONOBUOY COMMAND2. MANUAL3. PRESET4. GUARD3
1-35.1-36.1-37.1-38.UHF-1 does NOT provide what type ofoperation?1.2.3.4.ADF navigationCipher voiceLink 11 dataCipher voice guardUHF-2 does NOT provide what type ofoperation?1. ADF navigation2. Cipher voice3. Link 11 data4. Cipher voice guardHow many channels are available forautomatic tuning in the UHFtransceivers?1. 87502. 85003. 75004. 7000What system is used as a backuptransmitter for the CASS system?1-41.1-42.1-43.What high-frequency security unitprovides cipher voice communicationwith the AN/ARC-161 HF radiosystem?1. TSEC/KY-752. TSEC/KY-583. TSEC/KY-284. TSEC/KW-7How many channels does theAN/ARC-161 HF radio system tune toautomatically?1. 820,0002. 280,0003. 180,0004. 128,000Coupling might NOT be possible onthe HF-1 antenna in which of thefollowing frequency ranges?1.2.3.4.2.0000 to 4.8000 MHz6.0000 to 12.0000 MHz12.0000 to 13.2000 MHz13.2000 to 19.2000 MHz1-39.1. UHF-12. UHF-23. UHF-34. UHF-4Which of the following componentsinterface(s) the UHF-1 radio setwith the voice and data sources?1-44.What component of the AN/ARC-161 HPradio system includes thelightening arrester?1. RT-1000/ARC-1612. AM-6561/ARC-1613. C-9245/ARC-1614. CU-2070/ARC1-40.1. COMM switching matrix2. UHF-1 set control only3. UHF-1 voice selector only4. UHF-1 set control and voiceselectorWhat componentrelay panel tooperation?1. UHF-1 RT2. UHF-2RT3. UHF-1 control box4. UHF-2 control boxactivates the SATCOMthe SATCOM mode of1-45.1-46.Illumination of the CPLR READYindicator on the C-9245/ARC-161indicates the associated couplerhas passed the self-test routine.1. True2. FalseWhat indicator on theC-9245/ARC-161 will illuminateanytime the radio set failsself-test?1. CPLR FAULT2. CONT FAULT3. SYS FAULT4. RT FAULT4
1-47. When does the XMTR OFF indicatorilluminate on the C-9245/ARC-161?1. First 5 minutes of initialpower up2. Operating frequency change lessthan 1 Mhz3. System fault that affects thetransmitter4. BLANKER ON deselected1-48. What switch on the C-9245/ARC-161sets the transmitter for high-poweroutput?1. COND2. RESET3. SQ OFF4. BLANKER ON1-49. What switch on the C-9245/ARC-161permits AHE transmission andreception?1. AME2. COND3. RESET4. MODE1-50. What component of the AN/ARC-161 HPradio system provides Impedancematching between the antenna andthe receiver transmitter?1. CU-2070/ARC2. AM-6561/ARC-1613. RT-1100/ARC-1614. C-9245/ARC-1611-51. What component of the AN/ARC-161 HFradio system provides a spark gapto protect the radio if lightningstrikes the long-wire antenna?1. CU-2070/ARC2. AM-6561/ARC-1613. RT-1100/ARC-1614. C-9245/ARC-1611-52. What type of mount are the topmounts for the HF long-wireantennas?1. Fixed2. Breakaway3. Feed-through4. Movable1-53. What switch on the TSEC/KY-75 RCUselects the storage area when thekey Is loaded in the KY-75?1. SIG CLR2. PWR/FILL3. KY-75 RCU4. ALARM1-54. What component of the AN/ARC-161 HFradio system has a mic/headsetconnection for emergency andmaintenance operation of voice andkeying signals?1. CU-2070/ARC2. RT-1100/ARC-1613. AM-6561/ARC-1614. C-9245/ARC-1611-55. Which of the following radiosystems may be used to transmit andreceive data link?1. HF-1, UHF-1, and UHF-22. HF-2, UHF-1, and UHF-23. HF-1, HF-2, and UHF-14. HF-1, HF-2, and UHF-21-56. What component of the data linksystem converts serial digital datainto audio tones for transmissionover a voice radio?1. PP-6140/ACQ-52. C-7790/ACQ-53. CV-2528/ACQ-54. RT-1254/ACQ-51-57. What unit converts 30-bit parallelbinary computer data words Into26-bit serial data transmissionlanguage?1. Conmunications switching matrix2. Communications secure switchingmatrix3. Communications interface No. 14. Communications interface No. 21-58. Who has the primary responsibilityfor the hardware setup of the datalink system?1. COTAC2. TACCO3. NAV/COMM4. SENSOR 35
1-59. What arethat thetactical1. Frames2. Sections3. Sectors4. Ringsthe fixed-lengthdata link systeminformation intoblocksformatscalled?IN ANSWERING QUESTIONS 1-60 THROUGH 1-63,SELECT FROM COLUMN B THE DATA LINKDEFINITION THAT DEFINES THE DATA LINK TERMIN COLUMN A.A. DATA LINKTERMS1-60. Participating1-61. Data net controlunit1-62. Picket unit1-63. Data linkreferenceunit 1.positionB. DATA LINKDEFINITIONS2.3.4.Any stationthat is notthe DNCUAny ship,or shorestationactive inthe datalink netAny unitthat hasoverallcontrolover thelink netLatitudeandlongitudereferencepositionfor alldatatransmittedon the net1-64. What is the data link system’snormal mode of operation?1. LONG BROADCAST2. SHORT BROADCAST3. Roll call4. Picket1-65.1-66.1-67.1-68.1-69.1-70.1-71.Which of the following selectionsare made on the DTS when thissystem is acting as the DNCU?1. PICKET and CONTROL2. PICKET and ROLL CALL3. DNCU and CONTROL4. CONTROL and ROLL CAILWhat selection is made on the DTSwhen a surface ship or ASWOC is theDNCU?1. CONTROL2. ROLL CALL3. PICKET4. DNCUHow long will the LONG BROADCASTfunction transmit when selected?1. 5 minutes2. Continuously3. Through a single set of data4. Through all data twiceHow long will the SHORT BROADCASTfunction transmit when selected?1. 5 minutes2. Continuously3. Through a single set of data4. Through all data twicePickets useduring roll1. True2. Falsethe broadcast functionscall.When radio silence is selected, theDTS will NOT receive data.1. True2. FalseWhich of the following radiosystems may be used to transmit andreceive TTY?1. HF-1, HF-2, and UHF-22. HF-1, HF-2, and UHF-13. HF-1, HF-2, and VHF4. HF-1, UHF-1, and VHF6
1-72. What security unit providesencryption and decryption for allteletype data in the aircraft?1. TSEC/KW-72. TSEC/KY-73. TSEC/KW-284. TSEC/KY-281-73. What unit provides an Interfacebetween the TTY system and theradios?1. Teleprinter secure interface2. TTY signal data converter3. Communcations interface No. 14. Communications interface No. 21-74. What unit connects the TTY systemwith the central computer?1. Teleprinter secure Interface2. TTY signal data converter3. Communications interface No. 14. Communications interface No. 21-75. What selection is made on the HSPto produce hard copy of computerdata?1. CMPTR2. HRD CPY3. CONST4. EDIT7
ASSIGNMENT 2Textbook Assignment: “Navigation,” chapter 2, pages 2-1 through 2-19.2-1. Which of the followingInstrument(s) invention in theearly 1700s made accuratenavigation possible, even when faraway from land?1. Astrolabe2. Sextant only3. Chronometer only4. Sextant and chronometerIN ANSWERING QUESTIONS 2-2 THROUGH 2-5,SELECT THE NAVIGATION TERM FROM COLUMN BTHAT IS DEFINED BY THE NAVIGATIONDEFINITION IN COLUMN A.2-2.2-3.2-4.2-5.A. DEFINITIONS B. TERMSPosition of one 1.point In spacerelative to 2.another pointwithout reference 3.to distance4.A point defined bystated or impliedcoordinatesAn elapsed intervalSeparation of twopoints, measured bythe length of theline joining themPositionDirectionDistanceTime2-6. What distance is the approximatedifference between the highestpoint and lowest point on theearth’s crust?1. 10 miles2. 12 miles3. 15 miles4. 18 miles2-7.2-8.2-9.2-10.In reference to the earth’s sizeand shape, which of the followingconditions best describes the termellipticity of the earth?1.2.3.4.The diameter of the earthmeasured around the equator(6,887.91 nmi)The diameter of the earthmeasured through the poles(6864.57 nmi)The ratio between theequatorial and polar diameters(.9966 to 1)The difference between thediameters around the equatorand through the poles(23.34 nmi)The arc of a great circle is theshortest distance between twopoints on a plane.1. True2. FalseHow many sections is a meridiandivided into by the equator and thepoles?1. Six2. Two3. Eight4. FourThe arbitrary starting point forlongitude is identified by which ofthe following terms?1. Greenwich or zero meridian only2. Prime or zero meridian only3. First or prime meridian only4. Greenwich, zero, prime, orfirst meridian8
2-11.Which of the following are thesubdivisions of a degree of arc?IN ANSWERING QUESTIONS 2-16 AND 2-17,REFER TO FIGURE 2-6 IN THE TEXTBOOK.2-12.2-13.1. Minutes and seconds, or minutesend tenths of minutes2. Hours, seconds, and tenths ofseconds3. Hours, minutes, and seconds4. Hours, minutes, end tenths ofminutesWhich of the following is thenautical miles to statute milesconversion ratio?1. 6,000 ft = 1 statute mile2. 1.15 nautical mile =1 statute mile3. 1.15 statute mile =1 nautical mile4. 5,280 ft = 1 nautical mileA speed of 500 knots and a speed of500 nautical miles per hour areequivalent.1. True2. FalseIN ANSWERING QUESTIONS 2-14 AND 2-15,REFER TO FIGURE 2-5 IN THE TEXTBOOK.2-14. What circle represents the horizondivided into 360 degrees?1. Compass gyro2. Wet compass3. Compass rose4. Magnetic compass2-15. What is the true heading of theaircraft?1. 000 degree2. 062 degrees3. 110 degrees4. 295 degrees2-16. If the true heading of the aircraftshown is changed to 225 degrees,what is the true bearing to theisland?1. 045 degrees2. 090 degrees3. 180 degrees4. 225 degrees2-17. If the true heading of the aircraftshown is changed to 225 degrees,what is the relative bearing to theisland?1. 045 degrees2. 090 degrees3. 180 degrees4. 225 degrees2-18. What type of navigation uses onlyspeed and heading measurements tocompute position changes from aninitial position fix?1. Inertial2. Dead reckoning3. Magnetic4. Doppler2-19. World War II fostered thedevelopment of which of thefollowing radio aids?1. Doppler2. TACAN3. Omega4. Loran2-20. Altitude is defined as thehorizontal distance of a level, apoint, or en object measured fromgiven point.1. True2. Falsea2-21. Every aircraft has what type ofaltimeter?1. Pressure2. Laser3. Radar4. Absolute9
IN ANSWERING QUESTIONS 2-22 THROUGH 2-28,SELECT FROM THE FOLLOWING LIST THE TERMDESCRIBED IN THE QUESTION.A. Absolute altitudeB. Calibrated altitudeC. Density altitudeD. Indicated altitudeE. Pressure altitudeF. True altitudeG. Standard datum plane2-22. The zero-elevation level of anImaginary atmosphere known as thestandard atmosphere1. A2. C3. E4. G2-23. The value ofdisplayed on1. A2. B3. D4. Faltitude that isthe pressure altimeter2-24. Indicated altitude corrected forinstallation/position error1. B2. D3. E4. F2-25. The height above the standard datumplane1. A2. C3. E4. G2-26. Pressure altitude corrected fortemperature1. B2. C3. E4. F2-27.2-28.The actual vertical distance abovemean sea level1. B2. D3. E4. FThe height above the terrain1. A2. C3. E4. GIN ANSWERING QUESTION 2-29, REFER TOFIGURE 2-7 IN THE TEXTBOOK.2-29. At standard pressure, how manyinches of mercury are equal to670.2 millibars?1. 17.582. 19.793. 20.584. 29.922-30. What type of altitude is indicatedon the pressure altimeter?1. Absolute altitude2. Calibrated altitude3. Density altitude4. Indicated altitude2-31. What part of the reference plane isindicated on the barometric scaleof the pressure altimeter?1. The barometric pressure (in.Hg)2. The barometric pressure(millibars)3. The standard temperature (°C)4. The standard temperature (°F)2-32. Which of the following types ofpressure altimeters is/are used inaircraft?1. Counter-drum only2. Counter-pointer only3. Counter-drum-pointer only4. Counter-drum-pointer andcounter-pointer10
2-33. What increments in feet, from 0 to IN ANSWERING QUESTIONS 2-38 THROUGH 2-42,80,000, does the counter-pointer SELECT FROM THE FOLLOWING LIST THE TYPE OFaltimeter two-digit display PRESSURE ALTIMETER ERROR DESCRIBED IN THEindicate?QUESTION.1. 1002. 5003. 1,0004. 10,0002-34. Misinterpreting altitude by 1,000feet immediately before or afterthe l,OOO-foot counter moves is aproblem with which of the followingtypes of pressure altimeters?1. Counter-drum only2. Counter-pointer only3. Counter-drum-pointer only4. Counter-drum-pointer andcounter-pointer2-35. Misinterpreting altitude by 1,000feet immediately before and afterthe l,OOO-foot counter moves isprevented by which of the followingtypes of altimeters?1. Counter-drum only2. Counter-pointer only3. Counter-drum-pointer only4. Counter-drum-pointer andcounter-pointer2-36. What mode of operation of thecounter-drum-pointer altimeter usesstatic pressure from the staticsystem that is NOT corrected forposition error?1. Standby2. Servoed3. code4. Decode2-37. If electrical power is lost to thecounter-drum-pointer altimeter, thealtimeter automatically switches towhat mode of operation?1. Standby2. Servoed3. Code4. Decode2-38A. MechanicalB. ScaleC. Installation/positionD. ReversalE. HysteresisThe lag in the altitude indicationdue to the elastic properties ofthe materials within the altimeter1. A2. B3. D4. E2-39 A momentary indication in theopposite direction1. A2. B3. D4. E2-40 Caused by the airflow around thestatic ports1. B2. c3. D4. E2-41 Caused by the irregular expansionof the aneroid cells2-42 .1. A2. B3. c4. DCaused by the misalignment in thegears and the levers1. A2. B3. c4. D11
2-43. What method does the AN/APN-194(V)radar altimeter use to determinealtitude?1. Doppler shift2. Frequency change3. Time delay4. Signal strength2-44. The control knob on theID-1760A/APN-194(V) has which ofthe following functions?1. Power switch only2. Self-test switch only3. Position control for the limitbug4. Power and self-test switch andposition control for the limitbug2-45. Locked at 550 feet, in whataltitude mode is theRT-1042/APN-194(V) operating?1. Search2. Track3. Low-level4. High-level2-46. Locked at 2,500 feet, in what rangemode is the RT-1042/APN-194(V)operating?1. Search2. Track3. Low-level4. High-level2-47. What component of the AN/APN-194(V)system provides isolation of thereceiver from the transmit antenna?1. BZ-157A2. RT-1042/APN-194(V)3. ID-176OA/APN-194(V)4. MX-9132A/APN-194(V)2-49. What altitude is the high-altitudeindex on the AN/APQ-107 system wheninstalled in the P-3C aircraft?1. 170 (+20) feet2. 380 (L-20) feet3. 700 (+20) feet4. 830 (+20) feet2-50. What altitude above takeoffaltitude does the RAWS inhibit theradar altimeter reliability signal?1. 170 feet2. 380 feet3. 700 feet4. 830 feet2-51. What control on the C-6899/ARN-83causes a tone to be produced fortuning purposes?1. ADF switch2. LOOP switch3. ANT switch4. BFO switch2-52. The loop antenna signals are mixedwith the sense antenna signal inthe R-1391/ARN-83 in what mode ofoperation?1. ADF2. BFO3. LOOP4. ANTENNA2-53. What mode of operation causes theR-1391/ARN-83 to act as a normalreceiver?1. ADF2. BFO3. LOOP4. ANTENNA2-48. What component in the EA-6Aaircraft applies a 2-second tonealternating between 700 and1,700 Hz at ~-HZ intervals to theIts?1. BZ-157A2. RT-1042/APN-194(V)3. ID-176OA/APN-194(V)4. MZ-9132A/APN-194(V)12,
IN ANSWERING QUESTIONS 2-54 THROUGH 2-56,REFER TO FIGURE 2-12 IN THE TEXTBOOK.2-54. What type of radiation pattern isgenerated by the parasitic antennaelements in the outer rotatingcylinder of a typical TACANstation?1. Nine-lobe for course bearing2. Nine-lobe for fine bearing3. Cardioid for course bearing4. Cardioid for fine bearing2-55. What type of radiation pattern Isgenerated by the parasitic antennaelement in the inner rotatingcylinder of a typical TACANstation?1. Nine-lobe for course bearing2. Nine-lobe for fine bearing3. Cardioid for course bearing4. Cardioid for fine bearing2-56. How many auxiliary reference burstsper revolution is/are there in thepattern from a typical TACANstation?1. One2. Five3. Eight4. Nine2-57. At what interval does the TACANground station identify itself bytransmitting its call letters inMorse code?1. 37.2 seconds2. 39.7 seconds3. 45.0 seconds4. 53.8 seconds2-58. Which of the following itemsfacilitate(s) calculation of slantrange from the aircraft to theground station?1. Ground station bearing2. Ground station identity3. Time between ground stationinterrogation and aircraftreply4. Time between aircraftinterrogation and groundstation reply2-59. Which of the following informationis computed and/or processed in theRT-1022/ARN-84(V)?1. Station bearing and slant rangeonly2. Station bearing and identityonly3. Station slant range andidentity only4. Station bearing, slant range,and identity2-60. Which of the following stationinformation is provided by theAN/ARN-84 system in the receivemode?1. Bearing and identity only2. Range and identity only3. Bearing and range only4. Bearing, range, and identity2-61. Which of the following stationinformation is provided by theAN/ARN-84 system in the T/R mode?1. Bearing and identity only2. Range and identity only3. Bearing and range only4. Bearing, range, and identity2-62. Two aircraft are using the A/A modeof operation. The first aircraftis on channel 23. On what channelis the second aircraft on?1. 232. 633. 864. 1262-63. Which of the following indicationswill be seen if a fault is detectedduring interruptive self-test inthe AN/ARN-84 system?1. GO indicator till light on thecontrol panel for 9 seconds2. NO-GO indicator will light onthe control panel only3. NO-GO indicator will light onthe RT only4. NO-GO indicators will light onthe control panel and the RT13
2-64. What distance is the maximum rangeto receive usable loran signalsover water?1. 2,000 miles2. 2,800 miles3. 3,000 miles4. 3,800 miles2-65. What antenna is used to receiveloran signals for the AN/ARN-83system?1. UHF1 top blade2. HF2 long-wire3. ADF sense4. VHF stub2-66. The omega ground stations transmiton which of the followingfrequencies?1. 10.0, 11.3, and 13.6 kHz2. 10.2, 11.3, and 13.6 kHz3. 10.2, 11.6, and 13.6 kHz4. 10.6, 11.3, and 13.2 kHz2-67. Omega ground station(s) is/aredeselected at what range(s)?1. Less than 600 nmi only2. More than 7,200 nmi only3. Less than 600 nmi and more than7,200 nmi4. Between 600 nmi and 7,200 nmi2-68. After synchronization of theAN/ARN-99(V) omega system, whatcomponent controls the antennaselection?1. Central computer2. Antenna coupler3. Control panel4. Receiver-converter2-69. What section of the OR-90/ARN-99(V)enables test signals to be injectedinto the omega system?1. Correlator2. Receiver3. Digital converter4. Discrete storage2-70. What section in the OR-90/ARN-99(V)acts as an interface between thecommunication and the receiversections?1. Correlator2. Digital converter3. Discrete storage4. Power supply2-71. The AN/APN-153(V) navigational setprovides which of the followingtypes of navigational information?1. Airspeed and altitude2. Ground speed and drift angle3. Airspeed and drift angle4. Ground speed and altitude2-72. What information is derived fromthe antenna azimuth position of theAN/APN-153(V) navigational set?1. Altitude2. Airspeed3. Drift angle4. Ground speed2-73. What component of the AN/APN-153(V)uses a magnetron power oscillator?1. Receiver-transmitter2. Control indicator3. Central computer4. Antenna2-74. What component of the AN/APN-153(V)contains the pitch and roll rotarycouplers?1. Receiver-transmitter2. Control indicator3. Central computer4. Antenna2-75. On the C-4418A/APN-153(V) after theTEST position is selected on themode switch, what is the delay timeprior to proper test indications?1. 1 minute2. 2 minutes3. 15 seconds4. 45 seconds14
ASSIGNMENT 3Textbook Assignments "Radar," chapter 3, pages 3-l through 3-23.3-l.3-2.3-3.3-4.3-5.3-6.The AN/APS-115B radar set is whatband of radar?1. w2. x3. Y4. zWhat component of the AN/APS-115Bradar set combines the radar video?1. APP2. RIU3. CRS4. SDDWhat component displays radar videoinformation?1. APP2. RIU3. CRS4. SDDTilt stabilization of the radarantennas is accomplished by use ofpitch and roll data from whatcomponent?1. APP2. RIU3. CRS4. SDDWith both antennas in full scan,which of the following points arethe crossover points relative toaircraft heading?1. OOO" and 180°2. 060° and 270°3. 090° and 270°4. 120° and 300°What operator station contains theradar system operating controls?1. Acoustic sensor2. Nonacoustic sensor3. Tactical coordinator4. Navigator/communicator3-l. What is the manual tilt range ofthe radar antenna control fromaircraft horizontal?1. +1502. *3003. +lOO to -2004. +200 to -1003-8. What will OOOO displayed indicatewith HEADING STAB selected on theradar antenna control?1. Aircraft heading2. True heading3. Magnetic heading4. Target heading3-9. With respect to the aircraft, whatis the mechanical limit for radarantenna stabilization?1. +1002. 51503. *2004. *3003-10. With the scan switch In FULL on theradar antenna control, how manydegrees will the antenna scanduring single system operation?1. 4502. 9003. 180°4. 240°3-11. With the scan switch in SECTOR onthe radar antenna control, how manydegrees will the antennas scan?1. 45O2. 9003. 180°4. 240°16
3-12.3-13.The antenna position programmergenerates which of the followingsignals?1.2.3.4.Signals for antenna azimuthdrive motors onlySignals for antenna tilt drivemotors onlySignals for timing andsynchronization of the RTs,RIU, and IFF onlySignals for antenna azimuth andtilt drive motors and signalsfor timing and synchronizationof the RTs, RIU, and IFFWhat position is selected on theAPP fault isolation switch for thenormal mode of operation?3-16.3-17.What component generates thesynchronization that locks thetransmitter and receiver AFCtogether?1. Manual varactor2. Motor-driven varactor3. Receiver agilemodulator-demodulator4. Transmitter agilemodulator-demodulatorWhat subsection of the radar RTcontains a desiccant cartridge?1. Waveguide pressurization system2. Transmitter3. Receiver4. BITE3-14.3-15.1. ON2. OFF3. NORMAL4. OPERATEWhat frequency agile component inthe radar transmitter of theAN/APS-115B radar system is NOT ina standard radar transmitter?1. Magnetron2. Klystron3. Modulator4. SynchronizerThe frequency agility of theAN/APS-115B radar system has whatpositive effect on the system?1. Doubles the PW of thetransmitter2. Enhances the clutterelimination capability3. Decreases the antenna scanspeed4. Decreases PRF, which increasesoperational range3-18.3-19.3-20.3-21.Which of the following two beammodes will the radar antennaradiate?1. Pencil and conical2. Elliptical and cosecant squared3. Pencil and cosecant squared4. Elliptical and conicalWhat are the dimensions of theAS-2146/APS-115 radar antennaspoiled beam?1. 2.5° by 2.5°2. 2.5° by 3.8°3. 2.5° by 20.0°4. 3.8° by 20.0°The antenna elevation parkingcontrol is used to stow the aftantenna at zero-degree relativeaircraft heading when the aft radaris secured.1. True2. FalseWhat mode is selected on theforward radar control panel tooperate the forward radar in thesweep frequency mode?1. LONG2. SHORT3. FIXED4. AGILE16
3-22. What mode is selected on the radarcontrol panels to operate the radarantennas at a 6-RPM scan rate?1. LONG2. SHORT3. STC4. FTC3-23. On the radar control panels, whatsection on the high voltage selectswitch indicates to the operatorthat the radar system Is ready foruse when illuminated?1. WARM-UP2. STANDBY3. HV OFF4. HV FAIL3-24. What selectioncontrol panelsdisplay when alandmass?1. LONG2. SHORT3. STC4. FTCis made on the radarto improve thetarget is near a3-25. What knob is adjusted on the radarcontrol panels to match the radarnoise levels between the forwardand aft radars?1. STC DEPTH2. STC RANGE3. RCVR GAIN4. MAN TUNE3-26. What knob on the radar controlpanels varies the amount ofreceiver attenuation for close-intargets?1. STC DEPTH2. STC RANGE3. RCVR GAIN4. MAN TUNE3-27.3-28.3-29.3-30.3-31.What knob on the radar controlpanels varies the distance between0 and 20 nautical miles to whichintensity of close-in targets iseffectively reduced?1. STC DEPTH2. STC RANGE3. RCVR GAIN4. MAN TUNEWith the AFC/MAN switch In the MANposition on the radar controlpanels, the radars are in what modeof operation?1. Short2. Long3. Sweep4. FixedThe radar scan converter controlroutes the on-line/off-lineselection of the radar setoperation to what component?1. APP2. RIU3. CRS4. SDDSelection ofon the radarwill disablethe on-line operationscan converter controlall manual selectionswith the exception of the powerswitch on the front panel of whatcomponent?1. CP2. APP3. RIU4. LU 1What light will illuminate on theradar scan converter control toindicate the radar set is in theoff-line mode of operation?1. APP2. RIU3. TEST4. OFF LINE17
3-32. The 128 nautical mile range is 3-31. The sensor station 3 keysetselected on the radar scan generates primary control signalsconverter control during off-line in the on-line mode of operation,operation of the radar set. How which are processed through themany range marks are added to the central computer, LU 1, and theradar video? RIU.1. 82. 23. 124. 43-33. What component combines andamplifies radar and IFF video, andthen routes this data to thenonacoustic operator‘s display?1. APP2. RIU3. CRS4. SDD1. True2. False3-38. What is the range of the llD13Aradar maintenance trainer?1. 0 to 80,000 miles2. 0 to 80,000 kilometers3. 0 to 80,000 yards4. 0 to 80,000 feet3-39. In what unit of measure is anactual weapons control radar rangesnormally expressed?3-34. On the RIU, what control is used by 1. Footthe operator to input commands 2. Yardselected on the front switch panel 3. Kilometerinto the logic circuits? 4. Mile1. ENTER push button2. LOAD push button3. STOR switch4. OPER switch3-35. Which of the following types ofdisplay presentations areselectable by the operator on theRIU front switch panel?1. A-scan and PPI scan only2. B-scan and PPI scan only3. A-scan and B-scan only4. A-scan, B-scan, and PPI scan3-36. What component processes andcoordinates forward and aft antennaposition and scan functions, theapplication of power to both sets,and controls transmit and receivemodes of the two RTs?3-40. What are the modes of operation ofthe llD13A trainer?1. Track, bomb director, and firecontrol2. Bomb director, track, andsearch (PPI)3. Fire control, bomb director,and track ,4. Search (PPI), bomb director,and fire control3-41. What is the total number ofsubmodes available in the firecontrol mode?1. Five2. Two3. Six4. Four1. Logic unit one2. Central computer3. Radar interface unit4. Antenna position programmer18
3-42. What is the automatic time-out(time-delay) circuit used toprevent in most radar sets?1. Power application to thefilaments2. Power application to thehigh-voltage sections prior toproper warm-up time3. Radar transmission untilairborne4. Personnel injury during radarmaintenance3-43. During the search mode ofoperation, which of the followingfunctions is NOT available?1. Selectable range marks2. Horizon antenna scan3. Manual antenna control4. Operable B-scope3-44. In the fire control mode. operationis limited to what minimum range inyards?1. 40,0002. 20,0003. 3,5004. 2,5003-45. Which of the following functions isNOT available in the bomb directormode?1. PPI display2. Controllable range and azimuthmarks3. Depressed-center sector scan4. Operating ranges same as thesearch mode3-46. The basic controls of the 11D13Aare grouped into what total numberof major categories?1. Five2. Two3. Six4. Four3-47. The standby position of the 11D13Apower switch applies which of thefollowing types of power to thesystem?1. Filament power only2. Keep alive voltage to the TRtubes only3. Filament power and keep alivevoltage to the TR tubes4. High voltage power to thevaractor3-48. The mode switch of the 11D13Aselects one of the submodes ofoperation.1. True2. False3-49. What component of the 11D13A allowsthe operator to select manualsearch operation?1. Antenna control2. Mode switch3. Receiver gain4. Power selector3-50. With the 11D13A in the basic searchmode, what type of display ispresented?1. Depressed-center PPI2. A-scope3. B-scope4. PPI3-51. With the 11D13A in the automaticsearch mode, which of the followingindicators will displayinformation?1. A-scope and B-scope2. A-scope and PPI3. B-scope and PPI4. B-scope and depressed-centerPPI3-52. Which of the following items causesthe “jizzle” on the display in afire control radar set during theautomatic search mode of operation?1. Antenna nutation2. Antenna beamwidth3. Acquisition marks4. Target return19
IN ANSWERING QUESTION 3-53,FIGURE 3-11 IN THE TEXTBOOK.REFER TOIN ANSWERING QUESTION 3-57,FIGURE 3-13 IN THE TEXTBOOK.REFER TO3-53. With the llD13A in the automaticsearch mode, what feature on theB-scope can be used to mark an areaof target return?1. Range sweep2. Acquisition symbol3 Jizzle4:' Horizon line3-54. What does the artificial horizonline indicate in a fire controlradar set automatic search mode ofoperation?1. Target elevation2. Target track3. Aircraft track4. Aircraft attitude3-55. Which of the following items doesNOT constitute the major displaydifferences between the automaticand manual search modes?1. The acquisition marks bracketthe B-trace2. The acquisition marks move withthe B-trace3. The antenna is controllable inazimuth4. Artificial horizon line ismanually controlled3-56. In the operation of a fire controlradar set, what action begins thetime period for acquisition?1. Lock on is obtained2. Power is applied3. The operator switches antennacontrol from automatic tomanual search4. The operator places theacquisition symbol over theselected target3-57. Which of the following indicationsis removed from the B-scope displayduring automatic track mode of afire control radar set?1. Acquisition symbol2. Range strobe3. Steering dot4. Range circle3-58. What is indicated by the steeringdot of a fire control radar set?1. Antenna azimuth2. Antenna elevation3. Antenna position4. Antenna range3-59. In the automatic track mode of afire control radar set, whathappens when the system breaks lockon?1. The system reverts to themanual search mode2. The system reverts to theautomatic search mode3. The system reverts to themanual track mode4. The system remains in automatictrack mode and reacquires thetarget when it is withinrequired parameters3-60. Which of the following eventsoccurs in the fire control radarset breakaway mode?1. The range circle appears2. The large X appears3. The steering dot disappears4. The range notch disappears3-61. Which of the following displays isused in the fire control radar bombdirector mode of operation?1. A-scope2. E-scope3. C-scope4. Depressed-center PPI20
3-62. What component of the IFFtransponder system on the S-3aircraft provides lobing action toprevent the antenna system frombeing blanked out during aircraftmaneuvers?1. C-6280(P)/APX2. SA-1769/A3. RT-859/APX-724. TS-1843/APX3-63. What component on the S-3 aircraftprovides the IFF transponderoperation and test controls?1. C-6280(P)/APX2. SA-1769/A3. RT-859/APX-724. TS-1843/APX3-64. What component on the S-3 aircraftprovides the GO/NO-GO indicationson the IFF transponder control?1. C-6280(P)/APX2. SA-1769/A3. RT-859/APX-724. TS-1843/APX3-65. What is the frequency of receivedsignals for the IFF transponder?1. 1030 kHz2. 1090 kHz3. 1030 MHz4. 1090 MHz3-66. On the S-3 aircraft, what componentdetermines the Mode C informationpulses for the IFF transponder?1. The transponder control2. The transponder RT3. Airspeed-altitude computer4. COTAC pressure altimeter3-67. What is the total number ofpossible codes available in Mode CIFF?1. 2,0482. 2,4653. 4,0964. 4,9303-68. When the IDENT function is used inMode 1 of the IFF transponder, howmany total times is the reply pulsetrain containing the code in usetransmitted for each trigger pulsereceived?1. One2. Two3. Three4. Four3-69. When is the SPI pulse present inthe reply pulse train in Mode C?1. When a D4 pulse is present2. When a D4 pulse is not present3. When a F2 pulse is present4. When a F2 pulse is not present3-70. In an IFF/SIF system, the X-pulseis used for which of the followingpurposes?1. Emergencies2. Timing3. Helicopters4. Drones3-71. The IFF interrogator transmits onwhat frequency?1. 1030 kHZ2. 1090 kHz3. 1030 MHz4. 1090 MHz3-72. What component of the interrogatorset generates the initiation andinterrogation cycles of the system?1. RT-868A/APX-76A(V)2. SN-416A/APX-76A(V)3. SA-1568A/APX-76A(V)4. C-7383/APX-76A(V)3-73. What is the nominal peak powerlevel of the RF pulses generated bythe RT-868A/APX-76A(V)?1. 1 kW2. 2 kW3. 6 kW4. 8 kW21
3-74. What is the nominal peak powerlevel of the RF pulses from theswitch-amplifier to the differenceantenna pattern?3-75. When the TEST-CHAN CC switch is setto TEST on the C-7383/APX-76A(V)interrogator control box, whatsignal is modified in the IFFsystem to place the zero-rangereplies at approximately 4 nauticalmiles on the radar display?1. 1 kW2. 2 kW3. 6 kW4. 8 kW 1. Normal suppression2. ISLS3. RSLS4. Trigger timing22
ASSIGNMENT 4Textbook Assignment: “Antisubmarine Warfare,” chapter 4, pages 4-1 through 4-17.4-1. Sonar is an acronym derived fromusing the first letters of whatterms?1. Sound, Navy, return2. Sound, naval, rate3. Sound, navigation, ranging4. Sound, NAVAIR, range4-2. Echo-ranging sonar relies on thereception of an echo to determinewhat information about a target?1. Range only2. Bearing only3. Range and bearing only4. Range, bearing, and frequency4-3. What type of sonar does NOTtransmit sound, but functions byreceiving sound from the target?1. Active2. Passive3. Reverberation4. Return4-4. A high-pressure area occurs in thewater next to a hydrophone eachtime the hydrophone moves in whatdirection?1. Inward only2. Outward only3. Upward only4. Downward only4-5. The high-pressure area in a soundwave is known as a4-7.4-8.4-9.4-10.4-11.The wavelength of a sound wave isequal to the distance between twosuccessive1. rarefactions only2. compressions only3. rarefactions or compressions4. diaphragm vibrationsThe frequency of a sound wave isdefined as the number of which ofthe following item that occurs in1 second?1. Wavelengths2. Compressions3. Rarefactions4. DepressionsAbsorption of sound waves in theocean is least during which of thefollowing water conditions?1. White-capped waves2. Smooth sea surface3. Ship’s wake4. RiptidesAbsorption of sound waves in theocean is greatest during which ofthe following transmissions?1. Low frequency2. High frequency3. Low amplitude4. High amplitudeForeign matter in seawater includeswhich of the following items?4-6.1. depression2. rarefaction3. compression4. wavelengthThe low-pressurewave is known as1. depression2. rarefaction3. compression4. wavelengtharea in a sounda1. Silt and animal life only2. Animal life and seaweed only3. Silt and seaweed only4. Silt, animal life, seaweed, andair bubbles23
4-12. Sonar transmission losses can becaused by1. low-frequency pinging signals2. low transducer power output3. high foreign matter content ofwater4. weak pinging signals4-13. Assume that the crew on a destroyerwhich was conducting passive sonaroperations, witnessed a surfacemine explosion at a distance ofseveral hundred yards. If thesonar equipment detected the sound4 seconds after the explosion,approximately how many seconds wererequired for the sound travelingthrough the air to reach the crew?1. 1 sec2. 8 sec3. 16 sec4. 4 sec4-14. What is the effect on a sound wavetraveling in the ocean when thewave strikes the sea surface?1. Downward reflection2. Downward refraction3. Upward reflection4. Upward refraction4-15. At what angle must a sound beamstrike the side of a submarine toproduce an echo?1. 180°2. 90°3. 45°4. 0°4-16. Of the following surfaces, whichone will cause the LEAST amount ofreflections?1. Calm sea2. Rough and rocky bottom3. Sandy bottom4. Soft and muddy bottom4-17. Most individual sound reflectionsare sharp and clear, but vary inintensity. Why does reverberationappear as a continuous sound?1. The sound waves are reflectedat different intensities fromvarious objects2. The individual reflectionsintermingle, and set up soundwaves of different speeds3. The individual reflectionsoccur at different distancesfrom the sonar, and arrive atdifferent times4. The sound waves are reflectedat different frequencies fromvarious objects4-18. Which of the following conditionswill cause the greatest amount ofreverberation in deep water?1. A smooth ocean surface2. A sudden change in waterdensity3. Choppy waves on the surface4. A sandy ocean bottom4-19. The factor that will most likelydetermine maximum sonar range whensound propagation conditions areideal is1. absorption2. refraction3. reverberation4. divergence4-20. Varying temperature differences inthe ocean have which of thefollowing effects on a sound beamtraveling therein?1. Bends and distorts only2. Splits and distorts only3. Bends and splits only4. Splits, bends, and distorts4-21. The bending of a sound beam when itpasses from a medium of giventemperature to a medium ofdifferent temperature is known as1. refraction2. deflection3. reflection4. diffraction24
4-22. An increase in refraction of asonar sound beam has what effect,if any, on the range of the sonar?1. Increases range only2. Decreases range only3. Increases range initially, thendecreases it4. NoneIN ANSWERING QUESTIONS 4-26 through 4-28,SELECT THE TEMPERATURE CONDITION FROMCOLUMN B THAT IS MOST CLOSELY RELATED TOEACH OF THE OPERATING CONDITIONS LISTED INCOLUMN A. NOT ALL RESPONSES IN COLUMN BARE USED.A. OPERATINGCONDITIONSB. TEMPERATURECONDITIONS4-23. Relative to propagation of sound inthe ocean, which of the followingstatements is correct?1. Speed is affected by salinity,pressure, and temperature2. The higher the temperature, thelower the speed3. Refraction increases effectiverange4. Sound bends toward highertemperature4-24. What is the density of seawater percubic foot?4-26. Unusual conditionthat results inupward refraction4-21. Sound refracteddownward becausetemperaturedecreases withdepth4-28. Even-temperaturewater throughoutoperating area1. Positivethermalgradient2. Thermocline3. Isothermal4. Negativegradient1. 6.24 lb2. 6.40 lb3. 62.40 lb4. 64.00 lb4-25. The effect of pressure on a soundwave in the ocean tends to bend thewave in what direction?1. Upward only2. Downward only3. Upward or downwardIN ANSWERING QUESTION 4-29,FIGURE 4-4 IN THE TEXTBOOK.4-29.REFER TOThe isothermal and cool waterconditions shown in the figure havewhat effect, if any, on the soundbeam?.1. Causes the beam to bend upwardonly2. Causes the beam to converge onthe target3. Causes the beam to split,bending part upward and partdownward4. None4-30.The definition for layer depth isthe depth from the ocean1. surface to the top of a sharppositive gradient‘2. surface to the top of a sharpnegative gradient3. bottom to the top of a sharppositive gradient4. bottom to the top of a sharpnegative gradient26
4-31.4-32.4-33.When positive gradient conditionsexist in the ocean, layer depth isdefined as the depth of which ofthe following temperatures?1. Minimum temperature2. Maximum temperature3. Optimum temperature4. Relative temperatureWhich of the following cruisingmaneuvers by a submarine shouldprove most effective in causing asurface vessel to lose contact withthe submarine?1.2.3.4.Cruising in a uniformtemperature areaCruising above layer depthCruising below a thermoclineCruising in an isothermal layerA car is waiting at a crossing fora train to go by. The driver ofthe car honks the horn as the trainapproaches. After the train passesthe crossing, the engineer on thetrain blows the whistle. How willthe sound of the car horn heard bythe train engineer compare to thesound of the whistle heard by thecar driver?1.2.3.4.The horn will sound lower thanit actually is, and the whistlewill sound higher than itactually isThe horn will sound lower thanit actually is, and the whistlewill sound lower than itactually isThe horn will sound higher thanit actually is, and the whistlewill sound higher than itactually isThe horn will sound higher thanit actually is, and the whistlewill sound lower than itactually is4-34. As a sound emitter moves away froma receiver, which of the followingapparent changes will occur?1.2.3.4.Only frequency will increaseOnly wavelength will increaseWavelength and frequency willincreaseWavelength will decrease4-35. Which of the following sounds arerarely heard by the sonar operator?1. Pings2. Target echoes only3. Reverberations only4. Reverberations and targetechoesIN ANSWERING QUESTIONS 4-36 THROUGH 4-39,SELECT FORM COLUMN B THE RELATIVE PITCH OFTHE REFLECTED SOUND THAT IS MOSTDESCRIPTIVE OF EACH OF THE MOTIONCONDITIONS LISTED IN COLUMN A. NOT ALLRESPONSES IN COLUMN B ARE USED.4-36.4-37.4-38.4-39.A. RELATIVEMOTIONSSonar stationary,all signalsreceived classedas reverberationechoesSonar and targetmoving in oppositedirections, andseparatingSonar and targetmoving towardeach otherSonar and targetmoving abreast andthe same directionB. RELATIVEPITCH1. Higher2. Lower3. Same4. Undulatingin26
IN ANSWERING QUESTIONS 4-40 THROUGH 4-43,SELECT FROM COLUMN B THE COMPONENT OF THESONAR SET THAT IS ASSOCIATED WITH THEFUNCTIONS LISTED IN COLUMN A.4-40.4-41.4-42.4-43.A. FUNCTIONS B. COMPONENTSDisplays target 1. Domeechoes on a CRTcontrolProvides the pilot 2. Azimuth andwith digital range rangeand bearingindicatorinformation3. RecorderEnergizes thereeling machine 4. Bearing andraise and lowerrangesequenceindicatorDisplays targetechoes on a paperchart4-44. In the event the hydraulic systemfails in the cable reeling machine,the sonar set operator shouldactivate what switch to raise thedome?1. RAISE/LOWER switch2. SEAT switch3. TRAIL switch4. AUXILIARY RAISE switch4-45. What tool is provided the sonar setoperator to manually retrievelowered cable and dome in the eventof an electrical or hydraulicfailure?1. Speed wrench2. Block and tackle3. Turnbuckle4. Pulley arrangement4-46. What is/are the function(s) of ahydrophone?1. Sound transmission only2. Sound reception only3. Sound transmission andreception only4. Sound transmission, reception,and inversionIN ANSWERING QUESTIONS 4-47 THROUGH 4-49,SELECT FROM COLUMN B THE FUNCTION OF EACHOF THE PROJECTOR ASSEMBLY COMPONENTSLISTED IN COLUMN A. NOT ALL RESPONSES INCOLUMN B ARE USED.A. COMPONENTS B. FUNCTIONS4-47. Projector 1. Radiatesdirectional4-48. Fluxgate compass pulses intothe air4-49. Pressurepotentiometer 2. Convertselectricalpulses toacousticpulses3. Provides asignal toindicatedomeazimuthdeviationrelative tomagneticnorth4. Provides asignal toindicatehow deepthe dome issubmerged4-50. The stave assemblies in thehydrophone assembly function to1. measure the temperature of thewater2. measure the depth of the domein the water3. convert acoustic signals intoelectrical signals4. convert low-level ac signalsInto acoustic signals4-51. How often, if ever, must thehydrophone be adjusted?1. Every 28 days2. Every 56 days3. Every 112 days4. Never27
4-52. The function of the dual cursorposition control is to1. determine the position of thecursor in range only2. determine the position of thecursor in azimuth and range3. apply a signal to control thedirection in which thetransducer will radiate4. apply bearing and rangeinformation to the pilot’sbearing and range indicatorIN ANSWERING QUESTION 4-53, REFER TOFIGURE 4-19 IN THE TEXTBOOK.4-57.4-58.When the sonar setECHO-RANGING mode,target bearings byis operating inthe set presentsscanning (a)what number of sectors of (b) whatsize each?1. (a) Four (b) 90°2. (a) Eight (b) 90°3. (a) Four (b) 45°4. (a) Eight (b) 45°The sonar operator can determinetarget bearing by noting theposition of the target with respectto what part of the sector in whichthe target appears?4-53.4-54.4-55.4-56.Which of the following componentsis NOT mounted on the front panelof the sonar transmitter?1.2.3.4.FAULT indicatorCURSOR POSITION switchPOWER circuit breakerSTANDBY indicatorThe SDC has which of the followingfunctions?1. Provides a digital readout oftarget range, speed, and depth2. Processes and displays LOFAR,DIFAR, and CASS sonobuoysignals on the sonar set’s CRT3. Provides a digital readout oftarget size4. Processes and displays LOFAR,DIFAR, and ASPECT sonobuoysignals on the sonar set’s CRTWhich of the following modesclassified as an operational1. PASSIVE2. TEST3. RANGE4. ECHO-RANGINGis NOTmode?Which of the following modes is NOTclassified as a recording mode?1. BT2. TEST3. COMM4. ASPECT4-59.4-60.4-61.1. Top2. Center3. Bottom4. EdgeThe sonar operator can determinethe nature of a target by notingwhich of the following features ofthe target?1. Display outlines only2. Audio quality and displayoutline3. Range4. Closeness to other targetsWhat information is displayed onthe RANGE RATE-KNOTS meter?1. Range and speed of the targetwithin the cursor circle2. Range and speed of all targets3. Only the range of the targetwithin the cursor circle4. Only the speed of the targetwithin the cursor circleWhile operating in the PASSIVEmode, the operator notices a noisespoke on the CRT. What does thespoke indicate?1. The CRT is burned2. The hydrophore ismalfunctioning3. An underwater sound source ispresent4. A nearby sonar set is operatingin the PASSIVE mode28
4-62. The sonar operator can use voicecommunications by moving the MODEswitch to COMM position andactivating the microphone by1. depressing a switch on themicrophone2. turning a panel switch3. depressing a foot switch4. speaking into a voice-activatedmicrophone4-63. When the sonar set operates in TESTmode, system voltages and functionsare sampled to see if they arewithin preset limits. How does theoperator know when a preset limitis exceeded?1. A special blip appears on theCRT2. A fault indicator lights up3. A sound is audible in theheadset4. A meter indicates thediscrepancy4-64. When the sonar set is operating inBT mode, the recorder plotstemperature on what part of themoving chart?1. Vertical axis2. Horizontal axis3. Left side4. Right side4-65. When the sonar set is operating inBT mode, the recorder plots domedepth on what part of the chart?1. Top2. Bottom3. Horizontal axis4. Vertical axis4-66. The recorder RANGE mode provideswhich of the following indications?1. A continuous digital display oftarget range2. A series of range scale marksof target range3. A strip-chart display of targetrange4. A selectable digital display oftarget range4-67. The recorder ASPECT mode provideswhich of the following indications?1. A strip-chart display of targetechoes of varying intensity2. A strip-chart display of targetechoes of constant intensity3. A stylus sweep that draws theoutline of the target on achart4. A stylus sweep that draws halfof the target outline on oneside of the chart and the otherhalf of the target outline onthe other side of the chart4-68. Which of the following is apractical means of detecting asubmerged submarine from anin-flight aircraft?1. Detecting radio waves reflectedfrom the submarine’s surface tothe aircraft2. Detecting acoustic wavesreflected from the submarine’ssurface to the aircraft3. Detecting disturbances in thesubmarine’s magnetic fieldcaused by interaction with theearth’s magnetic field4. Detecting disturbances in theearth’s magnetic field causedby the submarine’s magneticfield4-69. Magnetic lines of force areessentially undistorted in passingfrom water to air because bothmedia have approximately the same1. reactance2. retentivity3. permeability4. dielectric strength4-70. The angle of change in theeast-west direction of the earth’snatural magnetic field is known asthe1. angle of variation2. angle of incidence3. entry angle4. dip angle29
4-71. The angle between a magnetic lineof force and the horizontal of thesurface of the earth is known asthe1. angle of variation2. angle of incidence3. entry angle4. dip angle4-72. MAD equipment is used to measurewhich of the following changes inthe earth’s magnetic field near alarge mass of ferrous material?1. Long-trace variation and dipangle2. Short-trace variation andincident angle3. Long-trace variation andincident angle4. Short-trace variation and dipangleIN ANSWERING QUESTION 4-73, REFER TOFIGURE 4-20 IN THE TEXTBOOK.4-73. The dip angle at the North Polecomprises approximately how manydegrees?4-74. Which of the following conditionsdetermines the amount of distortiona submarine will cause in theearth’s magnetic field?1. The submarine’s alignment inthe earth’s magnetic field only2. The submarine’s magneticqualities only3. The submarine’s latitudeposition on the earth’s surfaceonly4. The submarine’s alignment inthe earth’s magnetic field,magnetic qualities, andlatitude position4-75. The strength of the magnetic fieldof a submarine varies in which ofthe following ways with respect tothe distance from the submarine?1. As the square of the distance2. As the inverse square of thedistance3. As the cube of the distance4. As the inverse cube of thedistance1. 45°2. 90°3. 135°4. 180°30
ASSIGNMENT 5Textbook Assignment: “Antisubmarine Warfare,” chapter 4, pages 4-17 through 4-28.5-1. MAD equipment must be operated atvery low altitudes for which of thefollowing reasons?1. To place the detector as closeas possible to the anomaly2. To minimize noise caused by theionosphere3. To prevent high-voltagearc-over in the detector4. To prevent detection by thesubmarine’s radar5-2. MAD equipment must be capable ofdetecting distortion of the earth’smagnetic field at a rate of 1 partin1. 90,0002. 80,0003. 60,0004. 40,000IN ANSWERING QUESTIONS 5-3 THROUGH 5-5,REFER TO FIGURE 4-23 IN THE TEXTBOOK.5-3. What does the zero reference linerepresent in view C?1.2.3.4.The points of the anomaly wheremaximum concentration of theearth’s field is locatedThe path traveled by theaircraft in determining theparameters of the anomalyThe intensity of the earth’sfield at a given latitude andlongitude after distortion by aferrous metal massThe intensity of the earth’sfield at a given latitude andlongitude under normalconditions5-4. Position d of view A is representedby what value on the anomaly recordshown in view C?5-5. What position in view A representswhere a peak minus intensity isreached?1. f2. e3. d4. c5-6. Which of the following itemsdetermines the stylus swingmagnitude in a MAD recorder?1. Recorder calibration2. Magnetometer alignment3. Stronger signal at higheraltitude4. Anomaly signal intensity5-7. With MAD equipment, what two majorcategories of magnetic noise mustbe compensated for?1. Permanent magnetic and inducedmagnetic noise2. Maneuver and permanent magneticnoise3. Maneuver and direct currentcircuit noise4. Induced magnetic and directcurrent circuit noise5-8. Aircraft maneuver noise may becaused by which of the followingtypes of fields?1. Induced magnetic, permanent,and eddy current2. Induced magnetic, permanent,and direct current3. Induced magnetic, directcurrent, and eddy current4. Permanent, direct current, andeddy current1. 0.42. 0.23. 0.14. 0.031
IN ANSWERING QUESTIONS 5-9 THROUGH 5-12,SELECT FROM COLUMN B THE CAUSE OF EACHTYPE OF MAGNETIC NOISE LISTED IN COLUMN A.5-9.5-10.5-11.5-12.A. TYPES OF NOISEInduced magneticfieldEddy current fieldPermanent magnetfieldDirect currentcircuitB. CAUSES1. An aircraftelectricalload change2. The partsof anaircraft’sstructure3. An aircraftflightdirectionchange4. The currentflow in theaircraftstructure5-13. Which of the following is NOT anaxial coordinate term used todescribe the direction of amagnetic field?1. Vertical2. Horizontal3. Lateral4. Longitudinal5-14. Which of the following types offields are constant for a giventype of aircraft?1.2.3.4.Eddy current and direct currentcircuitInduced magnetic and permanentmagneticEddy current and inducedmagneticPermanent magnetic and directcurrent circuit5-15. The detecting head is placed in amagnetically quiet area tocompensate for what type ofmagnetic noise?1. Permanent magnetic field2. Induced magnetic field3. Direct current circuit4. Eddy current field5-16. What type of magnetic noise isnormally compensated for by the useof Permalloy strips?1. Permanent magnetic field2. Induced magnetic field3. Direct current circuit4. Eddy current field5-17. Outrigger compensators of Permalloyare oriented near the detectingelement to compensate for amagnetic field that varies underwhich of the following conditions?1.2.3.4.After major internal structuralchanges are made to theaircraftWhen the aircraft’s directcurrent load changesWhen the aircraft’s headingchangesAccording to the rate at whicha maneuver is conducted5-18. Electrical coils are used tocompensate for which of thefollowing aircraft magnetic fields?1. Permanent2. Induced3. Direct current circuit4. Eddy current5-19. Electromagnetic compensating loopsare used to compensate for whataircraft magnetic field?1. Permanent2. Induced3. Direct current circuit4. Eddy current32
5-20. The number of what factordetermines how many sets ofcompensating loops that are used tocompensate for dc magnetic noise onan aircraft?1. Aircraft axes requiringcompensation2. Aircraft magnetic fieldsrequiring compensation3. Aircraft dc load distributioncenters4. Aircraft detector magnetometersused5-21. Of the following manufacturingpractices, which one minimizes thesize of the electromagneticcompensating loops used in neweraircraft?1. Installing ground return wiresin the aircraft2. Removing the ground returnwires in tie aircraft3. Increasing the size of thevariable resistor connectedacross the loops4. Decreasing the size of thevariable resistor connectedacross the loops5-22. What are the flight characteristicsof an aircraft during adjustment ofthe MAD dc compensation system?1. Straight and any heading2. Level and any heading3. Straight and level, and twocardinal headings4. Straight and level, and fourcardinal headings5-23. MAD equipment compensation isusually performed under which ofthe following conditions?1. On a test bench at AIMD2. With a test set at compass rose3. In flight at sea4. In flight over land5-24. What is the purpose of MADcompensation?1. To eliminate all magneticfields near the magnetometer2. To eliminate the effect of theearth’s natural magnetic fieldon the magnetometer3. To balance the magnetic fieldof the magnetometer4. To balance the magnetic fieldsnear the magnetometer5-25. Due to the arrangement of thehelium absorption cells and the IRdetectors, the final output of whatcomponent of the AN/ASQ-81 MAD setis NOT affected by aircraftmaneuvers?1. AM-45352. DT-3233. DT-3554. C-69835-26. What component detects the anomalysignal from the AN/ASQ-81 MAD setmagnetic detector output signal?1. AM-45352. DT-3233. DT-3554. C-69835-27. On the AN/ASQ-81 MAD setamplifier-power supply, what switchis used to check the quickreplaceable assemblies in theamplifier-power supply?1. RES OSC ADJ switch2. CONF SELECT switch3. BUILT IN TEST switch4. MODE SELECT switch5-28. On the maintenance panel of theAN/ASQ-81 MAD set amplifier-powersupply, what switch is used toselect various systemconfigurations necessary for propermaintenance and troubleshooting?1. RES OSC ADJ switch2. CONF SELECT switch3. BUILT IN TEST switch4. MODE SELECT switch33
5-29. What component contains theoperating switches and indicatorsfor the AN/ASQ-81 MAD system?1. AM-45352. DT-3233. DT-3554. C-6983IN ANSWERING QUESTIONS 5-30 THROUGH 5-32,REFER TO FIGURE 4-27 IN THE TEXTBOOK.5-30.5-31.What indicator number indicates anamplifier failure?1. No. 12. No. 23. No. 34. No. 4What knob inhibits system outputwhen depressed?1.2. REC ZERO3. BANDPASS (right)4. BANDPASS (left)5-35. The potentiometers for adjustingthe maneuver and correlated signalsinto compensating terms are locatedon what AN/ASA-65 system component?1. AM-64592. C-89353. CP-13904. ID-2254IN ANSWERING QUESTIONS 5-36 THROUGH 5-38,REFER TO FIGURE 4-28 IN THE TEXTBOOK.5-36. The adjustment index for thepotentiometer in the transverse,longitudinal, and verticalmagnetometer circuits is providedby what set of index indicators?1. The top three2. The bottom three3. The top six4. The bottom SIX5-37. Except when compensation isrequired, in what position must theMAG TERM knob be?5-32.5-33.5-34.What knob is used to selectsensitivity ranges or self-test?1.2. REC ZERO3. BANDPASS (right)4. BANDPASS (left)The SAD inhibit signal is generatedin cases of excessive aircraftpitch and yaw rates.1. True2. FalseCompensation currents for the MADboom compensation coils areprovided by what component of theAN/ASA-65 magnetic compensatorgroup?1. AM-64592. C-89353. CP-13904. ID-22541. UP2. DOWN3. ON4. OFF5-38. What switchdirectly toselected?1. POWER-OFF2. UP-DOWN3. RATE4. SERVO-OFFprovides voltagethe servomotor5-39. Three coils oriented to sensemagnetic strength in each of thebasic axes are contained in whatcomponent of the AN/ASA-65 magneticcompensator group?1. DT-3552. CP-13903. ID-22544. DT-32334
5-40. The adjustment value for the ninemagnetic terms is calculatedsimultaneously by what component ofthe AN/ASA-65 magnetic compensatorgroup?1. DT-3552. CP-13903. ID-22544. DT-3235-41. The operator initiates autocompensation on what component ofthe AN/ASA-65 magnetic compensatorgroup?1. C-89352. CP-13903. ID-22544. DT-323IN ANSWERING QUESTIONS 5-42 THROUGH 5-44,REFER TO FIGURE 4-29 IN THE TEXTBOOK.5-42. What component initiates allcommands?1. MODE switch2. WPN LOAD switch3. EXEC button4. BITE button5-43. What component provides computeridentification and control of fixedcompensation functions?1. MODE switch2. WPN LOAD switch3. EXEC button4. BITE button5-44. What component providescompensation for at least80 percent of the weaponsinterference field?1. MODE switch2. WPN LOAD switch3. EXEC button4. BITE button5-45. What component of the AN/ASA-71selector group selects the signalto be recorded on the MAD recorder?1. C-76932. C-89353. RO-324. MX-81095-46. What component of the AN/ASA-71selector group generates a SAD mark1-kHz tone for the SENSORoperator’s ICS?1. C-76932. C-89353. RO-324. MX-81095-47. What component makes a hardcopy ofMAD contacts and SAD marks?1. C-76932. C-89353. RO-324. MK-81095-48. Where should the black pen trace onthe MAD recorder with B selected onthe mode knob?1. The +4 line2. The +2 line3. The +1 line4. The zero line5-49. All sonobuoys perform the samemission?1. True2. False5-50. When an area of the ocean isthought to contain a submarine,what minimum number of sonobuoy(s)is/are usually dropped?1. One2. Two3. Three4. Four35
5-51. What type of RF output signal istransmitted from a sonobuoyantenna?1. Frequency modulated VHF signal2. Frequency modulated UHF signal3. Amplitude modulated VHF signal4. Amplitude modulated UHF signal5-52. You should refer to which of thefollowing manuals before handling,storing, or disposing of sonobuoys?1. NAVAIR2. NAVAIR3. NAVAIR4. NAVAIR5-53. What totalselectablesonobuoy?1. 992. 503. 324. 3128-AQS-500-128-ASQ-500-128-SQS-500-128-SSQ-500-15-54. What total numberused in the olderare preset at the1. 992. 503. 324. 31number of channels areon an EFS systemof channels aresonobuoys thatfactory?5-55. Which of the following informationis stamped on both ends of anon-EFS system sonobuoy?1.2.3.4.Depth setting and RF frequencySerial number andmanufacturer’s codeContract lot number and weightSonobuoy type and RF channelnumber5-56. The sonobuoy is aircraft deployableby what total number of methods?1. Five2. Two3. Three4. Four5-57. Sonobuoys equipped with parachutesand rotochutes are NOT intermixedin the same tactical pattern forwhich of the following reasons?1. To maintain minimuminterference between sonobuoys2. To maintain proper sonobuoyspacing in the water3. To prevent rotochute andparachute entanglement4. To prevent hydrophore crosstalk5-58. What component is deployed from asonobuoy when the bottom plate isjettisoned?1. The hydrophore2. The parachute/rotochute3. The antenna4. The float5-59. What component(s) is/are deployedby some sonobuoys that have aseawater-activated battery thatfires a squib?1. A float and a hydrophore2. A float containing an antenna3. A hydrophore and an antenna4. A parachute/rotochute and abottom plate5-60. Most sonobuoys in the fleet containwhat type of battery to providepower to the sonobuoy circuits?1. Lithium dry cell2. Seawater-activated lithium3. Seawater-activated4. Zinc-oxide dry cell5-61. Data transmission usually startswithin at least how many minutesafter the sonobuoy enters thewater?1. 1.0 minute2. 2.0 minutes3. 3.0 minutes4. 0.5 minute36
5-62.5-63.5-64.5-65.5-66.What category of sonobuoy only hasthe listening feature?1. Active2. Passive3. Special purpose4. Multiple purposeWhat system is an improved passiveacoustic sensing system?1. DIFAR2. LOFAR3. CASS4. DICASSWhat are characteristics of thesonar pulse output from theself-timed active sonobuoy?1. Fixed pulse length and fixedpulse interval2. Fixed pulse length and variablepulse interval3. Variable pulse length and fixedpulse interval4. Variable pulse length andvariable pulse intervalThe command activated sonobuoy willping in response to command signalsfrom what source?1. The random generator in theCASS sonobuoy2. The automatic generator in theCASS sonobuoy3. The controlling aircraft4. The underwater targetWhat is the BT temperature probedescent rate?1. 15 feet per second2. 10 feet per second3. 5 feet per second4. 4 feet per secondIN ANSWERING QUESTIONS 5-67 THROUGH 5-72,SELECT FROM COLUMN B THE TYPE OF SONOBUOYASSOCIATED WITH EACH OF THE FUNCTIONSLISTED IN COLUMN A. SOME ITEMS IN COLUMNB WILL BE USED MORE THAN ONCE.5-67.5-68.5-69.5-70.5-71.5-72.A. FUNCTIONS B. TYPES OFSONOBUOYUsed for submarine 1. SARdetection andlocalization 2. BTMeasures water 3. ATAC/DLCtemperature4. CASSProvides data fordetermining water depthUsed as a floating RFbeacon for rescue purposesProvides one-way voicecommunicationProvides aircraft/submarinetwo-way communication5-73. How many separate sonobuoy channelscan be received simultaneously onthe AN/ARR-75 radio receiving set?1. 82. 163. 314. 995-74. What component of the SASP systemis a high-speed signal processorused to extract acoustic targetinformation from active and passivesonobuoy data?1. PP-74672. C-111043. TS-40084. SP-21435-75. What component of the SASP systemcontrols the power to the CASStransmitter?1. PP-74672. C-111043. TS-40084. SP-214337
ASSIGNMENT 6Textbook Assignment: “Indicators,” chapter 5, pages 5-1 through 5-27.6-1. Which of the following systemssupply information displayed on theHSIs and BDHIs?1. Communication systems2. Radar systems only3. Navigation systems only4. Radar/navigation systems6-2. In the HSI group, which, if any, ofthe following components areinterchangeable between thepilot’s, copilot’s, and NAV/COMM’sstation?1. HSI group controls only2. HSI group indicators only3. HSI group controls andindicators4. None of the above6-3. On the ID-1540/A horizontalsituation indicator, what is thereference line for reading theaircraft’s heading on the compasscard?1. The lubber line2. The bearing line3. The marker line4. The range lineIN ANSWERING QUESTIONS 6-4 THROUGH 6-8,SELECT FROM COLUMN B THE FUNCTION OF THEHSI ITEMS LISTED IN COLUMN A. SOME ITEMSIN COLUMN B WILL BE USED MORE THAN ONCE.A. HSI ITEMS6-4. Bearing pointer 1. Indicates theNo. 1lubber line6-5. COURSE indicator 2. Points to thebearing of6-6. To-From the selectedindicatorB. FUNCTIONSnavigationalpoint6-7. Bearing pointerNo. 2 3. Displays thecourse arrow6-8. Aircraft symbol setting in adigitalreadout indegrees4. Indicateswhether theselectedcourse isgoing towardor away fromthe selectedbeaconstation6-9. What component controls the inputsto the pilot’s HSI?1. A2082. A2793. A2804. A30938
6-10. The HDG selector switch on thepilot’s HSI control selects whichof the following heading signalsources for display on the HSIcompass card?1. INS-1 and INS-22. INS-1 and STBY GYRO3. INS-2 and STBY GYRO4. Vertical gyro and STBY GYRO6-11. On the pilot’s HSI control, theATTD selector controls which of thefollowing sources of attitudesignals for the pilot’s FDI sphere?1. INS-1 and INS-22. INS-1 and STBY GYRO3. INS-2 and STBY GYRO4. Vertical gyro and STBY GYRO6-12. On the pilot’s HSI control, withthe BRG 1 switch in DA, the COURSEHSI-FDI selector switch must be inwhat position to receive signalsfrom the central computer?1. TACAN2. VOR-1/ILS3. VOR-24. TAC NAV6-13. The BRG 1 switch selects the sourceof the bearing signal displayed onthe bearing pointer 1 on which ofthe following HSIs?1. Pilot’s, copilot’s, and TACCO’s2. Pilot’s, NAv/COMM’S, andTACCO‘s3. Copilot’s, NAV/COMM’S, andTACCO‘s4. Pilot’s, copilot’s, andNAV/COMM’s6-14. On the copilot’s HSI control, theATTD selector controls which of thefollowing sources of attitudesignals for the copilot’s FDIsphere?6-15. The BRG 2 switch on the copilot’sHSI control selects the source ofthe bearing signal displayed on thebearing pointer 2 on which of thefollowing HSIs?1. Pilot’s and copilot’s2. Copilot’s and NAV/COMM’s3. Copilot’s and TACCO’s4. TACCO’s and NAV/COMM’s6-16. When there is a failure with theheading function in the centralrepeater system, what indicatorilluminates on the NAV/COMM HSIcontrol?1. DIST NO-GO2. ATTD BEARING NO-GO3. INS NO-GO4. HEADING NO-GO6-17. Which of the following signals areselected for display on theNAV/COMM HSI by the NAV/COMM HDGswitch?1. MAG and TRUE heading signals2. INS-1 and INS-2 heading signals3. INS-1 and MAG heading signals4. INS-2 and TRUE heading signals6-18. What indication appears on the HSIwith VOR-1 selected if the inputsignal from VOR-1 becomesunreliable?1. VOR-1 NO-Go2. NAV NO-GO3. VOR-1 flag4. NAV flag6-19. What signal will be supplied to theHSI by the UHF-DF/OPTI and the ADFsystems when either is selected?1. Bearing signal2. To-From signal3. Course deviation signal4. NAV flag signal1. INS-1 and INS-22. INS-1 and STBY GYRO3. INS-2 and STBY GYRO4. Vertical gyro and STBY GYRO39
6-20. On the HSI, when a tactical mode isselected, true heading informationis switched out of the circuit, andthe compass card will be driven bymagnetic heading information.1. True2. False6-21. What is/are the quantity ofpointers on a BDHI?1. One2. Two3. Three4. Four6-22. From what reference is the BDHIcompass card read for aircraftheading?1. Pointer No. 12. Pointer No. 23. Lubber index4. Lubber line6-23. The BDNI distance counterof how many total synchroreceivers to position the1. Five2. Two3. Three4. Fourconsiststorquenumerals?6-24. The visual display system used byaircrew to search for, attack, anddestroy the enemy is commonlycalled the1. MDS2. PDS3. SDS4. TDS6-25. To displaythe pilot,attack information tothe electro-opticaldisplay system uses what type ofsource?1. Electronic2. Light3. Analog4. Digital6-26. The electro-optical sightused by the pilot is the1. EOD2. EODU3. HUD4. HUDUsystem6-27. Which of the following sourcesprovide(s) aircraft performancedata?1. Bore sight reference2. Aircraft systems3. Tactical computer set4. Aircraft flight sensors6-28. The transparent mirror thatdisplays information to the pilotin the HUD set is called a1. reflector2. combiner3. mirror/reflector4. windscreenIN ANSWERING QUESTION 6-29 REFER, TOFIGURE 5-8 IN THE TEXTBOOK.6-29. Which of the following informationis/are NOT processed by the signaldata processor for the head-updisplay unit?1. Bore sight reference2. Discrete signals3. Tactical computer input4. Aircraft flight sensor data6-30. The HUD set signal data processorinput receivers operate on which ofthe following channels at the sametime?1. One and two; three and four2. One and three; two and four3. One and four; two and three4. One, two, three, and four6-31. The identity signal for the HUD setinput receivers of the signal dataprocessor consists of how manytotal bits of data?1. 242. 203. 134. 1040
6-32. What digital computer section ofthe HUD set signal data processordistributes the clock pulses?1. Control logic2. Sequence control3. Symbol generator4. Processor counter6-33. The symbol generator operates inthree major modes. Each mode isdependent on the other, and all arecompleted simultaneously.1. True2. False6-34. During the sixth and seventhoperations of the line mode, whataction occurs with respect to the Xand Y data?1. X data is shifted2. Y data is shifted3. The X and Y channel rateregisters are shifted by thesymbol generator4. The BITE circuits check alldata in the X and Y channelrate registers for correctness6-35. The symbol generator samples theHUD busy signal for what reason?1. To decode information2. To generate a self-test mode3. To transfer data to the HUDimmediately4. To transfer data to the HUDwhen it is ready6-36. When the circle mode of operationin the symbol generator is beingused, the circle is drawn (a) inwhat direction and (b) begins atwhat point on the CRT?1. (a) Clockwise (b) top2. (a) Clockwise (b) bottom3. (a) Counterclockwise (b) top4. (a) Counterclockwise (b) bottom6-37. What is the purpose of thebright-up pulse delay in the circlemode of the signal generator?1. To compensate for the slowresponse time of the deflectioncircuits in the HUD2. To compensate for the fastresponse time of the deflectioncircuits in the HUD3. To turn off the symbolgenerator4. To turn on the signal generator6-38. What voltage is applied to the CRTanode of the HUD?1. 5,000 volts2. 10,000 volts3. 15,000 volts4. 20,000 volts6-39. The electrical power used for theoperation of the standby reticle ofthe HUD is obtained from whatsource?1. The high-voltage power supply2. The low-voltage power supply3. Outside of the HUD4. The HUD battery6-40. In the optical module of the HUD,what is the purpose of theautobrilliance sensor?1. To detect ambient light changes2. To adjust output voltage levelto the sensor3. To amplify manual brightnessinput signals from the controlpanel4. To detect ambient light changesand amplify output voltagelevel to the sensor6-41. At what rate are the symbols drawnon the CRT of the HUD video module?1. 15 times per second2. 25 times per second3. 50 times per second4. 100 times per second41
6-42. What control(s) the symbolbrightness of the CRT in the HUD?1. The X and Y bright-up signal2. The X and Y amplifiers3. The control grid circuit of theCRT4. The cathode bias circuit6-43. Which, if any, of the followingordnance information is availableto the pilot on the AVA-12 HUD?1. Armed/unarmed2. Type of fusing3. Type of weapon selected4. None of the aboveIN ANSWERING QUESTION 6-44, REFER TOFIGURE 5-9 IN THE TEXTBOOK.6-44. In the takeoff mode, what is themaximum radar altitude indication?1. 1,400 ft2. 1,500 ft3. 1,600 ft4. 1,700 ft6-45. Which of the following is afunction of the declutter featureof the AVA-12 HUD?1. To rearrange the symbols on theHUD2. To operate the air-to-groundmode3. To remove preselected unwantedsymbols from the display4. To remove all symbols from thedisplay6-46. The AVA-12 HUD has what totalnumber of basic modes of operation?1. One2. Two3. Three4. Five6-47. Which of the following informationis NOT available to the pilot inthe landing mode of the AVA-12 HUD?6-48. On the TDS display, tactical plotdata, required to maintain theaircraft position, is limited towhat station?1. Pilot’s2. Copilot’s3. Tactical coordinator’s(TACCO‘S)4. Sensor operator’s (SENSO’s)6-49. The display generator unit (DGU)sends all data types to alldisplays.1. True2. False6-50. The data presented on the pilot’sdisplay, produced by the GPDC, iscontrolled by which, if any, of thefollowing systems?1. GPDC2. INCOS3. DGU4. None of the above6-51. Which of the following informationis NOT available to the COTACdisplay?1. Raw radar2. S/C radar3. FLIR4. MAD6-52. What is the only informationpresented on the ARU display?1. FLIR2. Analog passive acoustic data3. MAD4. Raw radar6-53. A television system has how manytotal basic elements?1. One2. Two3. Three4. Four1. Radar altitude2. Target designator3. Angle-of-attack4. Vertical descent42
6-54. Which of the following is NOT apickup devise?1. Image orthicon2. Microwave relay link3. SEC tube4. Vidicon6-55. What type of scanning is used intelevision systems?1. Synchronized2. Nonsynchronized3. Horizontal4. VerticalIN ANSWERING QUESTION 6-56, REFER TOFIGURE 6-22 IN THE TEXTBOOK.6-56.In the transmitter, what is addedto the electrical picture signalfrom the camera to make a compositevideo signal?1. A sync operator signal2. A signal from the pickup device3. A receiver signal4. A synchronizing signal6-60. Interlaced scanning is used in mosttelevision systems for which of thefollowing reasons?1. To increase flicker2. To decrease bandwidth by afactor of 23. To increase bandwidth by afactor of 24. To decrease resolution6-61. What is the horizontal scanningfrequency of commercial broadcastand most CCTV systems?1. 30 Hz2. 60 Hz3. 525 HZ4. 15,750 Hz6-62. The standard television signalconsists of what total number ofelements?1. One2. Two3. Three4. Four6-57.6-58.6-59.What total amount of time isrequired for one scan of thepicture in the television systemsin the United States?1. 1/15 second2. 1/30 second3. 1/60 second4. 1/75 secondIn commercial broadcast television,for resolution of the fine detailin the horizontal direction, whattotal number of scanning lines areused?1. 1002. 2753. 3504. 525Of the following scanning methods,which is the simplest?1. Interlaced2. Noninterlaced3. Vertical4. Horizontal6-63. For commercial television pictureinformation, what is (a) themaximum percentage for black and(b) the minimum percentage forwhite of the maximum carriervoltage ?1. (a) 75 (b) 52. (a) 65 (b) 53. (a) 75 (b) 154. (a) 65 (b) 156-64. The kinescope blanking pulsesuppresses the scanning beam duringwhat time?1. Vertical flyback time only2. Horizontal flyback time only3. Vertical and horizontal flybacktime43
6-65. Which, if any, of the followingtypes of picture synchronizingpulses provides a means offrequency discrimination?1. Vertical sync pulse2. Horizontal sync pulse3. Serrated horizontal sync pulse4. None of the above6-66. A television system that usesrandom interlace, no special syncpulses, exhibits which, if any, ofthe following undesirablecharacteristics?1. Circuit complexity2. Long-range transmission useonly3. Insufficient resolution4. None of the above6-67. What is the video bandwidth of aslow-speed scan television system?1. 500 HZ to 250 kHZ2. 750 kHz to 10 MHz3. 10 MHz to 100 MHz4. 100 MHz to 10 GHz6-68. If four dynodes having a gain of 5were used in the image orthicontube, what would the be the gain ofthe multiplier section?1. 52. 253. 1254. 6256-69. The polarity of the signaldeveloped by the isocon is the sameas the polarity of the orthicon.1. True2. False6-71. A plumbicon tube with a designationof 67423B has a color response forwhat color?1. Red2. Green3. Blue4. WhiteIN ANSWERING QUESTIONS 6-72 AND 6-73,REFER TO FIGURE 5-31 IN THE TEXTBOOK.6-72. The tin dioxide contained on thefaceplate inner surface is whattype of semiconductor?1. N-type2. P-type3. PNP-type4. NPN-type6-73. What type of junction is formed inview B?1. PNP2. NPN3. PN4. PIN6-74. Which of the following is NOT anapplication of the SEC tube?1. Commercial television2. Extremely low-light3. High internal amplification4. Fast response to moving objects6-75. What is the basic differencebetween color and monochromepicture tubes?1. The type of phosphors coatingthe screen2. The type of biasing used3. The cathode circuit4. The grid circuit6-70. What is the transparent conductivecoating on the inner surface of thevidicon camera tube known as?1. Signal electrode2. Signal grid3. Signal cathode4. Signal anode44
ASSIGNMENT 7Textbook Assignment: “Infrared,” chapter 6, pages 6-1 through 6-28.7-1.7-2.7-3.7-4.7-5.7-6.Which of the following types ofremote sensing is natural lightphotography?1. Active only2. Passive only3. Active and passive4. InteractiveWhat are the differences between IRwaves and light, RF, and otherelectromagnetic waves?1. Reflection and frequency2. Refraction and absorption3. Wavelengths and speed4. Frequency and wavelengthsWhat is the IR frequency range?1. 300 MHz to 400 GHz2. 400 MHz to 300 GHz3. 300 GHz to 400 THz4. 400 GHz to 300 THzThe IR region lies between whatwavelengths of the electromagneticspectrum?1. 1.00 and 7,200 nanometers2. 1.00 and 7,200 micrometers3. 0.72 and 1,000 nanometers4. 0.72 and 1,000 micrometersThermal imaging is referenced interms of1. temperature2. reflectivity3. visible light4. colorThe types of IR imaging systemsgenerally used are fast-framing,mechanical-scanning devices know as1. BLIR2. FLIR3. SLIR4. WLIRIN ANSWERING QUESTION 7-7, REFER TO FIGURE6-2 IN THE TEXTBOOK.7-7. What effect does the atmospherehave on the target signal?1. Attenuates and blurs the signal2. Enhances and sharpens thesignal3. Attenuates and sharpens thesignal4. Enhances and blurs the signalIN ANSWERING QUESTION 7-8, REFER TO TABLE6-1 IN THE TEXTBOOK.7-8. IR radiation is broken into howmany total regions?1. One2. Two3. Three4. FourIN ANSWERING QUESTION 7-9, REFER TO FIGURE6-3 IN THE TEXTBOOK.7-9. The best IR windows in thetransmission spectrum of theatmosphere are between which of thefollowing wavelengths?1. 2 µm and 5 µm, 8 µm and 13 µm2. 3 µm and 5 µm, 8 µm and 14 µm3. 3 µm and 6 µm, 8 µm and 15 µm4. 2 µm and 7 µm, 9 µm and 15 µm7-10. All rotter emits IR radiation abovewhat temperature?1. -273°C2. -273°F3. 0°C4. 0°F45
7-11. If the temperature of a black bodyis increased 10 times, the IRradiation will be increased whatnumber of times?1. 1002. 1,0003. 10,0004. 100,0007-12. All materials commonly used invisible light optics aretransparent at IR frequencies.1. True2. False7-13. Which of the following qualities isdesired in optical material used InIR imaging systems?1.2.3.4.Transparent to visible lightHigh coefficient of thermalexpansionLow mechanical strengthHigh surface hardness7-14. What optical materials, if any,have all of the qualities desiredin IR optics?1. Silicon, germanium, and zincselenide2. Silicon, germanium, and zincsulfide3. Silicon, zinc selenide, andzinc sulfide4. None7-15. What component in the JR imagingsystem is the most important?1. Detector2. Optic3. Receiver4. Sensor7-16. A photographic film is an exampleof what type of detector?1. Elemental2. Imaging3. Photon4. Thermal7-17. What type of energy-matterinteraction involves the absorptionof radiant energy in the detector?1.2.3.4.Thermal effectPhoton effectElementalImagingIN ANSWERING QUESTIONS 7-18 THROUGH 7-21,SELECT THE DESCRIPTION FROM COLUMN B THATMATCHES THE TERM LISTED IN COLUMN A.A. TERM B. DESCRIPTION7-18. Photon effect 1. Radiationcauses7-19. Photoconductivity photocathodesurface7-20. Photoelectric electronemission7-21. Photoemissive to thesurroundingspace2. Radiantenergyphotonsinteractdirectlywithdetectormaterial3. Radiantenergychangesdetectormaterial’selectricalconduction4. Radiantsignalcauses adifferenceofpotentialacross a PNjunction46
IN ANSWERING QUESTIONS 7-22 THROUGH 7-25,SELECT THE COMPONENT FROM COLUMN B THATMATCHES THE DESCRIPTION IN COLUMN A.7-22.7-23.7-24.7-25.A. DESCRIPTION B. COMPONENTCollects the 1.incoming energy andfocuses the image 2.at the detectorsConverts the IRradiation signal 3.into an electricalsignal4.Converts the datacollected by thedetectors into avideo displayScans the scene imageDetectorsScenedissectionsystemFront-endopticsImageprocessingsystem7-26. What type of detector coolingsystem uses a heat exchanger and acompressor?1. Tricycle2. Quad-cycle3. Closed-cycle4. Opened-cycle7-27. What term is synonymous with FLIRso far as system operation isconcerned?1. FIRS2. IRDS3. FLIRDS4. IRFLDS7-28. What assembly of a FLIR systemconverts IR energy into a usablevideo signal?1. IRDS control2. Power supply-video converter3. Receiver-converter4. Video indicator7-29.7-30.7-31.7-32.7-33.What type of housing is used forthe FLIR receiver-converter?1. Forward section of astation-mounted FLIR pod only2. Separate pod mounted on theforward, lower aircraftfuselage only3. Separate pod mounted on theaft, lower aircraft fuselageonly4. Dependent on the aircraft modelThe FLIR receiver-converter breaksdown functionally into how manytotal subsystems?1. One2. Two3. Three4. FourIn the wide FOV mode of operation,what components are NOT in thesignal optical path?1. The TV camera optics2. The IR imaging optics3. The afocal optic lenses4. The visible collimating lensesChanges in temperature of anoptical lens changes what index?1. Refraction2. Reflection3. Diffraction4. DeflectionThe bottom side of the scan mirrorscans the visible light signals andreflects the signal into whatcomponent?1. The visible collimating lens2. The afocal optics unit3. The TV camera optics4. The IR imaging optics47
7-34.A scan mirror is indexed three linewidths in the vertical direction,making a total of 400 lines ofvideo, with only 100 detectors andamplifier channels. What is theinterlacing ratio?1. 4:12. 3:13. 2:14. 1:17-39. The FLIR heat exchangerconditioned air to whatsuppliesassemblyfor environmental control?1.2.3.4.Power supply-video converterControl servomechanismTarget tracking sight controlReceiver-converterIN ANSWERING QUESTIONS 7-40 AND 7-41,REFER TO FIGURE 6-14 IN THE TEXTBOOK.7-35.7-36.7-37.For proper operation, the IRdetectors are kept at whattemperature level?1. 0°C2. 0°F3. Cryogenic4. CarcinogenicFor each IR detector within thearray, the video amplifier modulecontains one preamplifier and threepostamplifiers for which of thefollowing purposes?1. To decrease the videointerference2. To increase the IR signal to auseable level3. To Increase the video ac level4. All the aboveThe output of the LED array isapplied to what unit?1. The reticle optics2. The IR imaging optics3. The collimating lens4. The afocal lens7-40.7-41.7-42.7-43.B-1 operates when which of thefollowing conditions occurs?1. The FLIR system is turned on2. K-1 is energized3. K-2 is energized4. K-3 is energizedB-2 operates when which of thefollowing conditions occurs?1.2.3.4.The FLIR system is turned onK-1 is energizedK-2 is energizedK-3 is energizedThe FLIR heat exchanger willmaintain the receiver-convertercompartment at what temperaturerange?1. 50°F to 68°F2. 50°C to 68°C3. 68°F to 77°F4. 68°C to 77°CWhich of the following is afunction of the receiver-converterstabilized gimbal subsystem?7-38.A light signal is applied to the TVcamera to indicate the receivinghead position from what unit?1. The2. The3. The4. Thereticle opticsIR imaging opticscollimating lensafocal lens1. To ensure coolant fluids arenot spilled2. To maintain a steady image ofIR patterns3. To ensure stabilized operatingtemperatures4. To maintain constant LOS withthe nose of the aircraft48
7-44. Azimuth and elevation commands areprocessed, and then applied to thereceiver head positioning motorsand gimbals by what WRA?1. Receiver-converter2. Control servomechanism3. Target tracking sight control4. Power supply-video converter7-45. The CS assembly inhibits thestabilization system when LOS ofthe receiver is operated by whatcomponent?1. An aircraft computer,2. Target tracking sight control3. IR detecting set control4. FLIR detecting set control7-46. The BITE logic module is located inwhat assembly?1. Power supply-video converter2. Control servomechanism3. Video indicator4. Target tracking sight control7-47. What subsystem Is NOT a powersupply-video converter subsystem?1. Power supply2. BITE3. Video processing4. Scan and interlace7-48. Receiver-converter synchronizingdrive and timing signals aregenerated by what powersupply-video converter subsystem?1. Power supply2. BITE3. Video processing4. Scan and interlacing7-49. Gray scale video is displayed onthe indicator as ten differentshades of gray. The operator usesthese shades of gray to performwhich of the following actions?1. Estimate the depth of thetarget2. Calibrate the camera assembly3. Estimate the target’stemperature4. Calibrate the TTSC7-50. The video processor receives rawvideo signals from what device?1. The LED array2. The TV camera3. The sync generator control4. The scanning mirror7-51. In the BITE mode of operation, asignal is generated to indicatethat the sync generator has failed.This signal is generated by whatBITE module?1. Receiver-converter2. TV video3. IRDSC4. CS7-52. To position the receiver head, theposition and rate commands from theIRDSC are processed as1. analog drive signals2. digital drive signals3. clamped dc averages4. sync voltage pulses7-53. In the position mode, the azimuthdrive signal is amplified to asignal large enough to drive thereceiver head azimuth motor by whatazimuth module?1. Mode logic2. Position compensation3. Rate compensation4. Heat sink7-54. In the FWD mode of operation thereceiver head is driven to whatazimuth position?1. 0°2. 45°3. 90°4. 180°7-55. What signal enables the azimuthrate compensation module to acceptazimuth position rate signals fromthe D/A converter only?1. Computer track command2. Rate compensation3. Decoder conversion4. Gimbal control49
7-56. What is the primary differencebetween the azimuth and elevationdrive subsystems?1. Manual override is only usedfor azimuth2. A computer is not used forazimuth3. Tachometer feedback is not usedin elevation circuitry4. Gimbal drive circuitry isdifferent7-57. In the FWD mode of operation, thereceiver head is slewed to whatelevation position?1. 0°2. -2°3. -3°4. -4°7-58. What is the primary function of thecontrol servomechanism BITEsubsystem?1. To maintain constant servo syncpulses2. To automatically locateservo-system failures3. To isolate component failures4. To convert computer Inputs togimbal bits7-61. During BITE 1 test, the receiverhead is slewed to what position?1. 0° azimuth and 0° elevation2. 0° azimuth and 4° elevation3. 0° azimuth and -4° elevation4. 4° azimuth and -4° elevation7-62. During BITE 2 test, the receiverhead is slewed to what position?1. 60° azimuth and -130° elevation2. 60° azimuth and 130° elevation3. 130° azimuth and -60° elevation4. 130° azimuth and 60° elevation7-63. The TTSC is used in what mode ofoperation?1. Computer2. Azimuth3. Elevation4. Manual7-64. Adjusting the thumb control on theTTSC produces voltage outputs fromwhich of the following transducer?1. Rate and climb angle2. Climb and azimuth angle3. Elevation and rate angle4. Elevation and azimuth angle7-59. When a BITE initiate signal isstarted, each test sequence lastswhat approximate length of time?1. 10 to 12 seconds2. 15 to 17 seconds3. 20 to 22 seconds4. 25 to 27 seconds7-60. During the fault isolate test, theDCI fault isolate signal goes tomode logic and1. coder storage module2. decoder storage module3. clock module4. memory module50
IN ANSWERING QUESTIONS 7-65 THROUGH 7-67,REFER TO FIGURE 6-26 IN THE TEXTBOOK.7-65. With the MODE switch in the STBYposition, the receiver head isstowed in what position?1. CW and up limits2. CCW and up limits3. CW and down limits4. CCW and down limits7-66. The FOV switch selects either awide or narrow field of view byswitching what assembly in or outof the receiver’s optical path?1. The afocal lens2. The collimating lens3. The imaging optics4. The camera optics7-67. The brightness of the reticle thatis superimposed on the video signalapplied to the video indicator iscontrolled by what knob?1. GAIN2. LEVEL3. RTCL BRT4. WHT HOT7-68. When a failure occurs in the videoindicator, what module extinguishesthe STATUS light?1. Sweep heat sink2. Video line driver3. Video amplifier/sync stripper4. Vertical and horizontal sweep51
ASSIGNMENT 8Textbook Assignment: “Weapons Systems,” chapter 7, pages 7-1 through 7-21.8-1.The computer-controlled weaponssystems provide a higher degree ofsafety by significantly reducingthe degree of which of thefollowing factors?8-6.With the F-14 weapon station IAloaded, ready, and selected, whatindication will the weapon statusindicator labeled 1A show on theACM panel?1. Mechanical failure2. Electronic failure3. Electronic error4. Human error1. Black2. White3. Gray4. Checkerboard8-2.The ACM panel in the F-14 islocated in the8-7.What F-14 control contains theDLC/CHAFF dispense push button?1. aft cockpit, center console2. aft cockpit, left console3. forward cockpit, center console4. forward cockpit, left console1. Control stick2. Displays control3. ACM JETT control4. HOT TRIGGER control8-3.Which of the following componentsis NOT located on the ACM panel inthe F-14?8-8.Master arm power on the F-14 Isremoved by what component when theaircraft is on the ground?8-4.8-5.1. Armament safety override switch2. Weapon status indicator3. Master arm switch4. ACM JETT switchBefore applying external power, thetechnician must ensure that allarmament switches are in theirproper position?1. True2. FalseThe stores on the station selectedon the armament panel in the F-14are jettisoned when what switch ispressed?1. Weapon status2. HOT TRIGGER3. Master arm4. ACM JETT8-9.8-10.1.2.3.4.Port main landing gearweight-on-wheels switchStarboard main landing gearweight-on-wheels switchNose landing gearweight-on-wheels switchLanding gear handle switchassemblyThe armament safety override switchon the F-14 is located in the1. forward cockpit, center2. nosewheel well3. control stick4. landing gear handleThe purpose of the armamentoverride switch on the F-14consolesafetyis to1. arm weapons2. bypass missile control system3. bypass landing gear safetycircuit for ground maintenance4. remove master arm power forground maintenance52
8-11.8-12.8-13.8-14.8-15.8-16.On the F-14, what are the modes ofoperation in the M61A1 20-mmgunfire control system?1. A/G and A/A only2. A/G and ACM encounter only3. A/A and ACM encounter only4. A/G, A/A, and ACM encounterThe AN/AWW-4 fuze function controlsystem on the F-14 provides (a)what type of voltage for chargingand arming and (b) what type ofarmament electrical fuzes?1. (a) High ac (b) bomb2. (a) High dc (b) bomb3. (a) High ac (b) missile4. (a) High dc (b) missileThe decoy dispensing system ejectswhat types of decoy rounds on theF-14?1. Flares only2. Chaff packages only3. Flares and chaff packagesWhat jettison modes are pilotcontrolled on the F-14?1. Emergency and ACM encounter2. Emergency and selective3. ACM encounter and auxiliary4. Selective and auxiliaryThe landing gear handle may be inthe DOWN position for what jettisonmode on the F-14?1. Emergency2. ACM encounter3. Selective4. AuxiliaryThe F/A-18 armament system containswhat data link system?1. AN/AWW-42. AN/AWW-73. AIM-74. AIM-98-17.8-18.On the F/A-18 ground power controlpanel, the application of externalpower to the instrument and avionicsystems is controlled by what totalnumber of toggle switches?1. One2. Two3. Three4. FourOn the F/A-18 ground power controlpanel, the RESET position of theexternal power switch accomplisheswhich, if any, of the followingfunctions?1. Provides electrical power tothe aircraft2. Removes electrical power fromthe aircraft3. Provides a circuit breaker foran overload4. None of the aboveIN ANSWERING QUESTIONS 8-19 AND 8-20,REFER TO FIGURE 7-9 IN THE TEXTBOOK.8-19. Normal weapon release, launch, andfire signals are disabled with theLDG GEAR control handle in the DNposition.1. True2. False8-20. With the LDG GEAR control handle inthe UP position, 28-volt dc poweris applied to the master armcircuit breaker from what relay?1. Main landing gearweight-on-wheels2. Main landing gearweight-off-wheels3. Nose landing gearweight-on-wheels4. Nose landing gearweight-off-wheels53
8-21. With the landing gear handle in theDN position to enable F/A-18weapons systems for groundoperational maintenance, whatswitch is used for override? 1. 1 and 92. 2 and 81. Landing gear override2. Armament safety override3. Master arm override4. Weight-on-wheels override8-22. With the F/A-18 master arm switchin the SAFE position, what is theonly armament release mode that canbe initiated?8-26. In the A/A and A/G computer modes,what weapon stations are alwaysdisplayed on the DDIs?3. 3 and 74. 4, 5, and 68-27. With the MASTER switch In the SAFEposition and in the A/G mode, aweapon selection will change theweapon loaded display by addingwhich of the following indicationson the DDIs?1. Bomb jettison2. Missile jettison3. Emergency jettison4. Selectable jettison8-23. The F/A-18 aircraft controller gripassembly contains which of thefollowing switches?1. The bomb release only2. The A/A only3. The trigger only4. The bomb release, A/A, andtriggerIN ANSWERING QUESTIONS 8-24 THROUGH 8-28,REFER TO FIGURE 7-13 IN THE TEXTBOOK.8-24. When will the DDIs display aprogram list?1. When In the A/A mode2. When in the A/G mode3. When the wing-form is displayed4. When the wing-form is notdisplayed8-25. The wing-form display on the DDIsis displayed during what mode(s) ofoperation?1. A/G only2. A/A only3. A/G and A/A4. SMP1. A box around the acronym only2. An X through the acronym only3. A box around and an X throughthe acronym4. A RDY indication below theacronym8-28. When a weapon is selected, thefirst priority station that hasthis particular weapon loaded isindicated by what indication on theDDIs?1. A box around the acronym only2. An X through the acronym only3. A box around and an X throughthe acronym4. A RDY indication below theacronym8-29. What component(s) control(s) theSMP?1. Digital display indicators2. Digital computers3. Master arm switch4. Armament safety override switch8-30. A weapon-type code is NOT requiredon what weapons loaded on F/A-18fuselage stations 4 and 6?1. AIM-7 missiles2. AIM-9 missiles3. MK-82 bombs4. MK-92 bombs54
8-31. On the F/A-18 MC/HYD ISOL panel,when the MC switch is in the NORMposition, power is applied to whichof the following computers?1. Computer No. 1 only2. Computer No. 2 only3. Computers Nos. 1 and 2 only4. Armament computer and computersNOS. 1 and 28-32. The F/A-18 jettison system has howmany total modes of release?1. One2. Two3. Three4. Four8-33. The F/A-18 auxiliary jettison modeis used to jettison weapons on thefive pylon stations at which of thefollowing times?1. When the emergency jettisonmode fails only2. When the selective jettisonmode fails only3. When the emergency or theselective jettison mode fails4. When the emergency and theselective jettison modes fail8-34. The F/A-18 normal bomb release haswhat total number of electricallycontrolled modes of operation?1. One2. Two3. Three4. Four8-35. Voltage is applied to the F/A-18bomb arming unit through aircraftwiring from what power source?1. PS-64192. PP-64193. AN/AWW-7B4. AN/AWW-48-36. Where on the F/A-18 is theCAGE/UNCAGE switch for the Walleyeguided missile system located?1. The throttle2. The armament control panel3. The flap control panel4. The aircraft controller gripassembly8-37. What F/A-18 system provides controland guidance to the Mk 21 and Mk 27Walleye weapons?1. AN/AWW-42. AN/AWW-7B3. AN/AIM-74. AN/AIM-98-38. On the F/A-18 aircraft controllergrip assembly, what trigger switchposition, if any, initiates launchof the AGM-65 Maverick missile?1. First detent2. Second detent3. Third detent4. None8-39. Control of the AGM-88 HARM missileis supplied through what F/A-18component or system?1. DDI2. SMP3. Data link4. Radar8-40. Control of the AIM-7 Sparrowmissile in the F/A-18 is suppliedthrough SW and what othercomponent or system?1. DDI2. FLIR3. Radar4. Data link8-41. On the F/A-18 DDI, what indicationshows that the Sparrow missileselected is NOT tuned?1. The SEL light will notilluminate2. An X through the SP acronym3. The box around the SP acronymflashes4. No X through the SP acronym55
8-42. With the F/A-18 AIM-9 Sidewindermissile IR COOL switch in the NORMposition, coolant is enabled to allseeker heads at which of thefollowing times?1.2.3.4.8-43. ThehasWhen the weight is off thewheelsWhen the MASTER switch is inthe ARM positionWhen the station is selected onthe DDIWhen the acronym SW has SELdisplayed below on the DDIF/A-18 M61A1 20-mm gun systemwhat total number of submodes?1. One2. Two3. Three4. Five8-44. The P-3C has what total number ofbomb bay and wing stations?1. 82. 103. 184. 668-45. The S-3A has what total number ofbomb bay and wing stations?1. Five2. Two3. Six4. Four8-46. What stores will the P-3Celectrical jettison release systemrelease or eject?1. All kill stores only2. All search stores only3. All kill and search stores8-47. What stores will the S-3Aelectrical jettison release systemrelease or eject?1. All wing stations stores only2. All search stores only3. All wing stations and searchstores8-48.8-49.8-50.8-51.8-52.8-53.What total number of free-fallsearch stores launch chutes, ifany, is on the S-3A aircraft?1. One2. Two3. Three4. NoneWhat is the approximatethe P-3C size B chute?1. 5 in.2. 7 in.3. 10 in.4. 12 in.diameter ofOn the P-3C, what device shears thepin lugs and ejects the sonobouystores from the SLC?1. The CAD2. The SUS3. The SLT4. The TLCOn the P-3C and the S-3A, whataction prevents the inadvertentfiring of the SLT stores on thedeck?1.2.3.4.Manually placingsafety switch inpositionLeaving the sonoaccess door openManually placingsafety switch topositionDeactivating thecircuit breakerthe sonothe SAFEsafety switchthe sonothe OFFsono launchIn the S-3A, what item is alwaysloaded in tube P2?1. A MLM2. A SUS3. A SLT sonobuoy4. A SAR sonobuoyWith the exception of tube P2 inthe S-3, when the emergencyjettison circuit is activated, allSLCs will jettison in less than 10seconds.1. True2. False56
8-54. The SH-3 contains what total numberof size A launcher tubes?1. 122. 243. 484. 728-55. What type of system is used tolaunch sonobuoys in the SH-60?1. Hydraulic2. Pneumatic3. Free-fall4. CAD8-56. With multiple faults detected bythe SH-60 ECU and launcher BITEtest, the failure codes will cycleat what intervals?1. 12-second2. 10-second3. 5-second4. 3-second8-57. Without electrical power, which ofthe following devices operate theP-3C bomb bay doors for groundmaintenance?1. A hand pump only2. A hand pump and manual controlvalve3. A 3/8-inch drive crank only4. A 3/8-inch drive crank andmanual control valve8-58. Without electrical power, which ofthe following devices operate(s)the S-3A bomb bay doors for groundmaintenance?1. A hand pump only2. A hand pump and manual controlvalve3. A 3/8-inch drive crank only4. A 3/8-inch drive crank andmanual control valve8-59. When working in the bomb bays ofeither the P-3C or S-3A, what itemmust be in place?1. Electrical power2. The 3/8-inch drive crank3. The sono door safety pin4. The bomb bay door safety pin8-60. What crew member has final controlof the release of bomb bay storesIn the P-3C and S-3A?1. The TACCO2. The SENSO3. The pilot4. The copilot8-61. The P-3C wing launcher assemblyuniversal pylon uses what bombrack?1. Aero 58A-12. Aero 65A-13. BRU-11A/A4. BRU-22A/A8-62. The S-3A wing pylon supports whatejector rack?1. Aero 58A-12. Aero 65A-13. BRU-11A/A4. BRU-22A/A8-63. In the P-3C, control and release ofsearch and kill stores from theaircraft is concentrated betweenwhat crew members?1. The pilot and TACCO2. The pilot and SENSO3. The copilot and SENSO4. The copilot and TACCO8-64. In the S-3A, control and release ofsearch and kill stores from theaircraft is concentrated betweenwhat crew members?1. The pilot and TACCO2. The pilot and SENSO3. The copilot and SENSO4. The copilot and TACCO8-65. The P-3C search store release andcontrol in the manual mode iscompleted by what crew member?1. The pilot2. The SENSO3. The TACCO4. The ordnance57
8-66. The jettison of wing stores Inpairs on the P-3C is at whatintervals?1. 1-second2. 2-second3. 3-second4. 4-second8-67. What landing gear weight-on-wheelsswitches disable the P-3C and S-3Ajettison circuits on the ground?1. Main2. Nose3. Right4. Left58
ASSIGNMENT 9Textbook Assignment: "Computers," chapter 8, pages 8-1 through 8-17.9-1. Which of the following items areexamples of computer hardware?1. Compilers2. Assmemblers3. Transistors4. Executive routines9-2. Which of the following items areexamples of computer software?1. Microchips2. Printed circuit cards3. Input/output libraries4. Cathode-ray tubesIN ANSWERING QUESTIONS 9-3 THROUGH 9-6,SELECT FROM COLUMN B THE PROGRAMMINGLANGUAGE THAT PERFORMS THE FUNCTION LISTEDIN COLUMN A.A. FUNCTIONS9-3. Used for business 1. Jovialonly2. FORTRAN9-4. Used for real-timesystems 3. PL/19-5. Used for business 4. COBOLand scientificprograms9-6. Used for large scalecommand and controlSystemsB. PROGRAMMINGLANGUAGES9-7. What are the two basic types ofcomputers?1. Linear and octal2. Binary and logic3. Linear and digital4. Analog and digital9-8. As it applies to computers, whatcharacteristic applies to the termanalog?1. Representation by means ofcontinuously variable physicalquantities2. Representation by the use ofnumerical equivalents3. Representation by the use ofgraphic analysis4. Representation by the SWAG9-9. Because of their design, analogcomputers have unlimitedapplications.1. True2. False9-10. What method is used to representthe instructions used by a digitalcomputer?1. Numerical equivalents2. Delayed transmission3. Direct translation4. Analog input9-11. What are the two basic types ofdigital computers?1. Special-purpose and linear2. Special-purpose and nonlinear3. Linear and Nonlinear4. Special-purpose andgeneral-purpose9-12. What method is used to change theoperation of a special-purposedigital computer?1. The input frequency is changed2. The construction of the machineis altered3. The instruction input ischanged4. The primary RTMS is changed59
9-13. What method is used to change theoperation of a general-purposedigital computer?1. The input frequency is changed2. The construction of the machineis altered3. The instruction Input ischanged4. The primary RTMS is changed9-14. In a digital computer, what are aseries of electronic devices forthe temporary storage of a binaryword?1. Registers2. Counters3. Gates4. Compilers9-15. In a digital computer, what seriesof electronic devices progressthrough a specific binary sequence?1. Registers2. Counters3. Gates4. Compilers9-16. In a digital computer, what seriesof electronic devices are used toset a flip-flop or generate a timescondition signal?1. Registers2. Counters3. Gates4. CompilersIN ANSWERING QUESTION 9-18. REFER TOFIGURE 8-1 IN THE TEXTBOOK.9-18. The digital data processor containswhat total number of basic units?1. Five2. Two3. Three4. FourIN ANSWERING QUESTIONS 9-19 THROUGH 9-21,PERTAINING TO A DIGITAL COMPUTER CP,SELECT THE UNIT FROM COLUMN B THATPERFORMS THE FUNCTION LISTED IN COLUMN A.NOT ALL RESPONSES IN COLUMN B ARE USED.A. FUNCTIONS B. UNITS9-19. Performs the 1. Controlactual processing unit9-20. Stores the data 2. ALUto be processed3. I/O unit9-21. Directs theoverall computer 4. InternaloperationdatastorageunitIN ANSWERING QUESTIONS 9-22 THROUGH 9-25,PERTAINING TO A DIGITAL COMPUTER CONTROLSECTION, SELECT THE REGISTER FROM COLUMN BTHAT IS DESCRIBED IN COLUMN A.9-17. In a digital computer, what devicesare used to control the transfer ofdata words from one register toanother?1. Registers2. Compilers3. Counters4. Gates9-22.9-23.9-24.9-25.A. DESCRIPTIONS B. REGISTERSHolds the 1. Pinstruction codeduring execution 2. SCContains the 3. Generaladdress of thenext sequential 4. Instructioninstruction to beexecutedStores the quantityused for address modificationConsists of one or tworegisters to accomplish theholding of a shift count60
9-26. What computer is the most practicaltype to use when speed and fullyautomatic operation is desired.1. Stored-program2. Internally stored-program3. Externally stored-program4. Multiaddressed-program9-27. Computer instructions are brokendown into what four categories?1. Bit, byte, digit, and literal2. Input, output, shift, anddouble3. Transfer, control, arithmetic,and logic4. Binary, octal, digital, andhexadecimal9-28. Instructions that provide thecomputer with the ability to makedecisions based on the results ofpreviously generated data are knownas what category of instructions?1. Literal2. Logic3. Shift4. Binary9-29. Each instruction refers to only oneoperand, and the instructions arenormally taken from the memory insequential order. This is acharacteristic of what type ofcomputer?1. Single-address2. Single-address-sequential3. Multiaddress4. Multiaddress-sequential9-30. Logic and arithmetic operations areperformed in what section of adigital computer?1. RAM2. I/O3. CPA4. ALU9-31. After an arithmetic process iscompleted, the result is stored inwhat location in the arithmeticunit?1. The assembler2. The accumulator3. ‘The compiler4. The input/output libraries9-32. The process by which instructionsand data are read into astored-program type of computerbefore a calculation is started isknown as1. inputting2. outputting3. loading4. down loading9-33. Which of the following is thepurpose of "bootstrap"Instructions?1. To cause the program to"branch," depending on whethera certain condition is met2. To place enough instructionsinto a computer memory so thatthese instructions can be usedto bring in more instructions-3. To cause the program toterminate if a "bad-data" inputis sensed4. To perform multiplication ofcertain numbers9-34. A nonmagnetic toroidal form is usedin what type of memory storagedevice?1. A tape wound core2. A semiconductor3. A ferrite core4. A thin film9-35. A toroidal form molded from ceramiciron oxide, possessing magneticproperties, is used in what type ofmemory storage device?1. A tape wound core2. A semiconductor3. A ferrite core4. A thin film61
9-36. In magnetic core memories, a singlecore can store how many total bitsof a word?1. One2. Two3. Three4. Four9-37. In the core element of a magneticcore memory, what conditiondetermines whether a 1 or a 0 isstored?1. The temperature of the coreaperture2. The absence or presence of amagnetic field3. The intensity of the magneticfield around the core4. The direction of the currentflow around the core9-38. Most of the semiconductor memoriesused in modern digital computersare of what type?1. ROM MSI2. RAM SSI3. MOS LSI4. NIS NSI9-39. A ferromagnetic material depositedon a substrate of thin glass iswhat type of memory storage device?1. Magnetic disk2. Magnetic drum3. Magnetic tape4. Thin film9-40. A cylinder that rotates at aconstant speed is what type ofmemory storage device?1. Magnetic disk2. Magnetic drum3. Magnetic tape4. Thin film9-41. A storage medium NOT used as a mainstorage medium due to its longaccess time, but widely used tostore large amounts of data or as amain storage backup, is what typeof memory storage device?1. Magnetic disk2. Magnetic drum3. Magnetic tape4. Thin film9-42. A convenient storage medium forsemipermanent storage of massvolumes of production programs iswhat type of memory storage device?1. Magnetic disk2. Magnetic drum3. Magnetic tape4. Thin film9-43. What section of the digitalcomputer is the interfacethe computer and externalbetweendevices?1. CU2. I/O3. ALU4. IDSU9-44. What two methods are usedtransmit digital data?to1. Linear and nonlinear2. Serial and nonserial3. Serial and parallel4. Parallel and nonparallel9-45. Each bit of a binary word to betransmitted must have its own datapath. This is a characteristic ofwhat type of digital datatransmission system?1. Nonlinear2. Nonserial3. Serial4. Parallel9-46. What is the simpler and lessexpensive method of digital datatransmission?1. Nonlinear2. Nonserial3. Serial4. Parallel62
9-47. What type of data transmissionpermits data transmission by radio?1. Nonlinear2. Nonserial3. Serial4. Parallel9-48. What is the least efficient generalform of input data to a computer?1. Manual inputs from a MMI, suchas a keyboard or console2. Analog inputs from instrumentsor sensors3. Digital inputs from instrumentsor sensors4. Inputs from a source on or inwhich data has been previouslystored in a form intelligibleto the computer9-49. Which of the following limitationsis common to most input devices?1. Not compatible with thecomputer2. Requires single-phase power3. Located a great distance fromthe computer4. Involves some mechanicaloperation9-50. The output information from acomputer generally takes which ofthe following forms?1. Codes and symbols displayed ona monitor screen or otherdevice2. Manually generated controlinformation3. Information recorded in ROM4. Software documentationIN ANSWERING QUESTIONS 9-51 THROUGH 9-54,SELECT FROM COLUMN B THE DEVICE THATMATCHES THE DESCRIPTION IN COLUMN A.A. DESCRIPTIONS B. DEVICES9-51. 12 or more 1. SSIcircuits,equvalent in 2. MSIcomplexity to atypical logic gate 3. LSI9-52. Fewer than 10 4. VSLIcircuits, no morecomplex than atypical logic gate9-53. Contains the equivalentto 1,000 or more logic gates9-54. Large and complex circuitry,equivalent to 100 or morelogic gates9-55. A computer program that takescertain commands and translatesthem into instructions necessaryfor a computer to execute is whattype of program?1. Converter2. Interpreter3. Translator4. Compiler9-56. What is the purpose of asubroutine?1. To store the entire program atvarious places in order toensure reliability2. To eliminate repeating certaingroups of instructionsthroughout the program3. To enter administrative datarelative to the programinstruction4. To “delay” a program63
9-57. What typeaccess toof instructions controlthe various subroutines?1. Operational routines of themain program2. Executive routines of the mainprogram3. Selection routines of the mainprogram4. Access routines of the mainprogram9-58. Instructions that provide thecomputer with the ability to leavethe sequential execution of themain program, perform a subroutine,and return to the sequentialexecution are what type ofinstructions?1. Selection2. Executive3. Sequencing4. Jump and return jumpIN ANSWERING QUESTIONS 9-59 THROUGH 9-62,SELECT FROM COLUMN B THE PROCESS THATMATCHES THE DESCRIPTION LISTED IN COLUMNA.9-63. A thorough and rapid method for thedetection of failures in a specificportion of a computer is performedby what program?1. Analysis2. Debugging3. Maintenance4. Error check9-64. What type of maintenance program isdesigned to detect the existence oferrors?1. Reliability2. Diagnostic3. Utility4. Locator9-65. What type of maintenance program isused to locate the circuits inwhich computer malfunctionsoriginate?1. Reliability2. Diagnostic3. Utility4. LocatorA. DESCRIPTIONS9-59. To locate errorsB. PROCESSES1. Analysis9-60. To use symbols to 2. Debuggingrepresent thevarious operations 3. Encodingto be performed4. Flow9-61. To lay out the diagramproblem in a formthat will lend itselfto interpretation9-62. To convert flow chartoperations into computerlanguage64
ASSIGNMENT 10Textbook Assignment: “Automatic Carrier Landing System,” chapter 9, and “ElectrostaticDischarge Program,” chapter 10, pages 9-1 through 10-18.IN ANSWERING QUESTIONS 10-1 THROUGH 10-4,SELECT FROM COLUMN B THE ITEMS DESCRIBEDIN COLUMN A.10-1.10-2.10-3.10-4.A. DESCRIPTIONS B. ITEMSUsed to lock ontothe landingpatternUsed to establishthe proper glidepathProvides warningsif automaticcarrier landingmode becomesuncoupled or isdegradedEnsures that the pilotand the aircraft havethe best and safestpossible approach anddescent to the carrierdeck and touchdown1. ACLS system2. Autopilotsystem3. Data linkpitchcommands4. Data linkrollcommands10-5. What system provides the interfacebetween the data link and theflight control surfaces?1. APC2. AFCS3. DDCS4. R-DG10-6. Data link messages and signals arereceived, invalid messages arescreened out, and signals are sentto the autopilot system by whatsystem?1. APC2. AFCS3. DDCS4. R-DG10-7. What system determines theglide-path errors from thecarrier’s instrument landingsystem radar?1. APC2. AFCS3. DDCS4. R-DG10-8. The glide-path, pulse-coded,Ku-band information is transmittedfrom the carrier to the aircraftby what system?1. LCCS2. ACLS3. ILS radar4. Radar beacon10-9. Ka-band signals are transmittedfrom the carrier to the aircraftto track the aircraft and comparethe aircraft’s position to thedesired glide path by what system?1. LCCS2. ACLS3. ILS radar4. Radar beacon10-10. What subsystem of the AN/SPN-42system will generate a waveoffsignal?1. Control console2. Data link monitor3. Digital computer4. Tracking pulse radar set10-11. What system transmits X-bandreplies to the carrier to provideprecise aircraft position data?1. LCCS2. ACLS3. ILS radar4. Radar beacon65
10-12. To maintain the angle-of-attack,and thus the airspeed duringaircraft landing approach, whatsystem automatically adjusts thethrottles?1. APC2. AFCS3. DDCS4. R-DGIN ANSWERING QUESTIONS 10-13 THROUGH10-16, SELECT FROM COLUMN B THE COMPONENTDESCRIBED IN COLUMN A.A. DESCRIPTIONS10-13. Determines anddisplays backuppitch and rollattitudeB. COMPONENTS1. Discretemessageindicator2. VGI10-14. Displays ninestatus indications 3. Approachfrom the one-way indexerlink system, theradar beacon, and 4. Warningautopilotindexerpanel10-15. Provides anotherangle-of-attack inthe pilot’s field of view10-16. Provides status indications forthe APC and AFCS, and whether awaveoff has been initiated10-17. A fully automatic approach fromentry point to touchdown on theflight deck is what ACLS mode ofoperation?1. Mode I2. Mode II3. Mode III4. Mode IV10-18. Manual pilot control to touchdownon the flight deck with talkdownguidance by a shipboard controlleris what ACLS mode of operation?1. Mode I2. Mode II3. Mode III4. Mode IV10-19. During Mode I landing operation,the pilot is cleared for approachby what indicator illumination onthe discrete message indicator?1. CMD CONTROL2. ACL READY3. AP CPLR4. LDG CHK10-20. During Mode I landing operation,deck motion compensation will beadded to the glide-path commandsat how many seconds fromtouchdown?1. 1.5 sec2. 12.5 sec3. 15.0 sec4. 17.5 sec10-21. During Mode I landing operation,the landing system will freeze thepitch and bank commands at howmany seconds from touchdown?1. 2.5 sec2. 2.0 sec3. 1.5 Sec4. 1.0 secIN ANSWERING QUESTION 10-22, REFER TOFIGURES 9-4 AND 9-5 IN THE TEXTBOOK.10-22.During Mode I landing operation,the LCC sends a wave-off signalautomatically if the aircraftexceeds the boundaries at how manyseconds from touchdown?1. From 2.5 to 17.5 sec2. From 2.0 to 10.0 sec3. From 1.5 to 12.5 sec4. From 1.0 to 7.5 sec66
10-23. At which of the followingfrequencies is atmospheric staticmost critical?1. 500 kHz2. 25 MHz3. 50 MHZ4. 500 MHz10-24. Precipitation static is a severeproblem in which of the followingfrequency bands?1. Low only2. Medium only3. Low and medium4. Ultra high10-25. Cosmic noise is normally heard inwhich of the following frequencybands?1. Low only2. Medium only3. Low and medium4. Ultra high10-26. Which of the following is atypical source of sustainedswitching transients?1. Receivers2. Transmitters3. Synchronizers4. Generators10-27. Broadband random noise consists ofimpulses that have which of thefollowing characteristics?1. Regular in shape andrecurrence rate2. Irregular in shape andduration3. Constant in voltage andduration only4. Constant in voltage, duration,shape, and recurrence rate10-28. A circuit or device that carries avarying electrical current is apotential source of receiverinterference.1. True2. False10-29. What type of dc motor, if any, ismore apt to cause interference(noise) in a radio receiver?1. Permanent magnet2. Series wound3. Shunt wound4. None10-30. The control circuit of a relay maycause more interference than thehigher powered circuit beingcontrolled by the relay.1. True2. False10-31. Radio interference from operatingradar is most likely caused bywhich of the following circuits?1. Indicator2. Modulator3. Receiver4. Synchronizer10-32. In the tuning band of a receiver,oscillator leakage is the greatestat which of the following points?1. Both the high and low ends2. The low end3. The middle range4. The high end10-33. If a receiver has an operatingfrequency of 150 MHz and an IF of20 MHz. what is the oscillatorleakage frequency?1. 20 MHz or 150 MHz2. 120 MHz or 150 MHz3. 130 MHz or 170 MHz4. 150 MHz or 170 MHz10-34. Radio interference is caused by acold-solder joint for which of thefollowing reasons?1. Its reactance varies withapplied voltage2. Its resistance varies withapplied voltage3. Its capacitance variesinversely with frequency4. Its inductance varies withfrequency67
10-35. A receiver tuned to 2.4 kHzexperiences extreme full-waverectification interference. Whichof the following aircraftcomponents is the probable source?1. Starter motor2. Wing-flap motor3. Single-phase invertor4. Three-phase generatorIN ANSWERING QUESTION 10-36, REFER TOFIGURE 10-1 IN THE TEXTBOOK.10-36. Interference is very low at thepower source for which of thefollowing reasons?1. Source operation highfrequency2. Source operation low frequency3. Battery high impedance4. Battery low impedance10-37. Which of the following actionswill reduce inductive magneticcoupling in aircraft wiring?1. Increasing the spacing betweenthe wires2. Decreasing the spacing betweenthe wires3. Decreasing the angle betweenthe wires4. Replacing all the existingwire with shielded wire10-38. Which of the following antennaleads is a source of radioreceiver noise in the HF range?1. Shielded receiver2. Unshielded receiver3. Shielded transmitter4. Unshielded transmitter10-39. What elements are normally used toachieve interference reduction atthe source?10-40. The efficiency of a perfectcapacitor in bypassing radiointerference increases in whatproportion to the capacitance ofthe capacitor?1. Linearly2. Exponentially3. Directly4. Indirectly10-41. The value of a capacitor as abypass is lost at which of thefollowing frequencies?1. At the resonant frequency2. At frequencies much lower thanthe resonant frequency only3. At frequencies much higherthan the resonant frequencyonly4. At frequencies much higher andlower that the resonantfrequency10-42. The ideal position to place acapacitive filter to reduce radiointerference is in what location?1. Between the source of theinterference and the receiver2. Close to the source ofinterference3. The receiver circuit4. The source circuit10-43. Feedthrough capacitors used tofilter interference in an accircuit should have a voltagerating of at least what magnitudeacross the capacitor?1. Twice the applied voltage2. Twice the peak voltage3. Four times the applied voltage4. Four times the peak voltage1. High-frequency diodes2. High-value components3. Discrete components4. Transistors68
10-44. A capacitor is NOT normally usedalone as a filter in a dcswitching circuit for which of thefollowing reasons?1. It only works in an ac circuit2. Its reactance is too high fora dc circuit3. Its value is too large for adc circuit4. Its interference exceeds thatof opening an unfilteredcircuit10-45. A resistor used for proper RCfiltering should be what size inrespect to the load resistance?1. One-fifth2. One-fourth3. One-third4. One-half10-46. When the inductance-capacitancefilter method is used, theinductor should be connected inthe dc power supply in whatconfiguration with respect to theload?1. In series only2. In parallel only3. In series or parallel,depending on the inductorrating4. In series-parallel10-47. An ideal low-pass filter has noinsertion loss at which of thefollowing frequencies?1. At its cutoff frequency2. Below its cutoff frequencyonly3. Above its cutoff frequencyonly4. Above or below its cutofffrequency10-48. To eliminate radiation ofharmonics produced by anoverdriven output amplifier, whattype of filter is used?1. Bandpass2. Band-reject3. Low-pass4. High-pass10-49.10-50.10-51.10-52.10-53.10-54.The bandpass filter configurationof sections for an antenna isnormally selected so the upperlimit of the pass band approachesor exceeds the frequency of thelower limit of the pass band bywhat multiple factor?1 0Six2. Two3. Eight4. FourBand-reject filter elements arearranged in which of the followingbasic configuration?1. W-section2. V-section3. P-section4. L-sectionWhich of the following bondingmethods is considered ideal forall frequencies?1. Direct2. Indirect3. Simplex4. MultipleWhich of the following lengths ofbonding jumpers is the mosteffective in eliminating lightningdischarge?1. 8 in.2. 2 in.3. 6 in.4. 4 in.What is the lowest voltage thatwill destroy or damage anESD-sensitive device?1. 10 V2. 20 V3. 30 V4. 35 VThe generation of staticelectricity on an object byrubbing is known as the1. electrostatic charge2. dielectric effect3. triboelectric effect4. prime charge69
10-55. When rubbed against any of theother three, which of thefollowing substances will assumethe positive charge whenseparated?1. Saran2. Nickel3. Steel4. Aluminum10-56. Under which of the followingconditions is generated staticelectricity decreased?1. Hot air2. Dry air3. Cold air4. Humid air10-57. Which of the following is NOT anESD prime generator?1. Synthetic mats2. Vinyl3. Common solder suckers4. Carbon impregnatedpolyethylene10-58. What is the minimum resistance forpersonnel ground straps?1. 25,000 ohms2. 150,000 ohms3. 250,000 ohms4. 500,000 ohms10-59. Which of the following proceduresshould NOT be performed whenworking on ESD-sensitive devices?1.2.3.4.Make continuity checks onpersonnel ground straps with aSimpson 260 meter orequivalentGround the work area,personnel ground straps, andequipmentMake periodic electrostaticmeasurements at allESD-protected work areasWear cotton smocks whenworking with ESD-sensitivedevices70