Review of Actuators with Passive Adjustable Compliance ...
Review of Actuators with Passive Adjustable Compliance ...
Review of Actuators with Passive Adjustable Compliance ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
BY RONALD VAN HAM,THOMAS G. SUGAR,BRAM VANDERBORGHT,KEVIN W. HOLLANDER,AND DIRK LEFEBER© EYEWIRE<strong>Review</strong> <strong>of</strong> <strong>Actuators</strong> <strong>with</strong> <strong>Passive</strong><strong>Adjustable</strong> <strong>Compliance</strong>/ControllableStiffness for Robotic ApplicationsIn the growing fields <strong>of</strong> wearable robotics, rehabilitationrobotics, prosthetics, and walkingrobots, variable stiffness actuators (VSAs) oradjustable compliant actuators are beingdesigned and implemented because <strong>of</strong> theirability to minimize large forces due to shocks, tosafely interact <strong>with</strong> the user, and their ability tostore and release energy in passive elastic elements.This review article describes the state <strong>of</strong>the art in the design <strong>of</strong> actuators <strong>with</strong> adaptablepassive compliance. This new type <strong>of</strong> actuator isnot preferred for classical position-controlledapplications such as pick and place operations butis preferred in novel robots where safe human–robot interaction is required or in applicationswhere energy efficiency must be increased byadapting the actuator’s resonance frequency. Theworking principles <strong>of</strong> the different existingdesigns are explained and compared. The designsare divided into four groups: equilibrium-controlledstiffness, antagonistic-controlled stiffness,structure-controlled stiffness (SCS), and mechanicallycontrolled stiffness.In classical robotic applications, actuators arepreferred to be as stiff as possible to make preciseposition movements or trajectory tracking controleasier (faster systems <strong>with</strong> high bandwidth).The biological counterpart is the muscle that hassuperior functional performance and a neuromechanicalcontrol system that is much moreadvanced at adapting and tuning its parameters.The superior power-to-weight ratio, force-toweightratio, compliance, and control <strong>of</strong> muscle,when compared <strong>with</strong> traditional robotic actuators,are the main barriers for the development <strong>of</strong>machines that can match the motion, safety, andenergy efficiency <strong>of</strong> human or other animals.One <strong>of</strong> the key differences <strong>of</strong> these systems is thecompliance or springlike behavior found in biologicalsystems [1]. Although such compliantDigital Object Identifier 10.1109/MRA.2009.933629SEPTEMBER 2009 1070-9932/09/$26.00ª2009 IEEE IEEE Robotics & Automation Magazine 81
The equilibrium position <strong>of</strong> acompliant actuator is defined as theposition <strong>of</strong> the actuator where theactuator generates zero forceor zero torque.actuators are probably less suited for classical position-controlledapplications, they <strong>of</strong>fer valuable advantages in certain novel applications,e.g., safe human–robot interaction, comfortable actuatedprostheses, and orthoses, and in the design <strong>of</strong> legged robots.It is worth mentioning that the range <strong>of</strong> compliance that isrequired depends on the application, as is the torque requirement<strong>of</strong> the actuator. In this article, no specific torques aregiven for the actuators, because only the concepts <strong>of</strong> the actuatorsare described. Most actuators <strong>with</strong> controllable stiffnessconsist <strong>of</strong> two classical stiff actuators that can be easily dimensionedfor the required torque.Applications requiring adaptable compliance can bedivided into two groups: those for robot–human interactionand those to adjust natural dynamics. The distinction betweenthese groups depends on the primary use <strong>of</strong> the compliance<strong>with</strong>in the application.Adaptable <strong>Compliance</strong> inRobot–Human InteractionAdaptable compliance is used to make the interaction betweenrobots and humans safer and more natural. The following is anonexhaustive list <strong>of</strong> application examples.u Industrial robots are heavy machines actuated by stiffsystems, and they do not give or comply in a collision,thereby inducing severe damage. Therefore, for safetyreasons, these devices are placed in a human-free environment.However, for some applications, it is useful tohave robots and humans fulfilling tasks together [2].This requires safer robots, which can be achieved bydesigning compliant joints. However, <strong>with</strong> a compliantjoint, it is harder to place the tool center point in anexact position or to track a specific trajectory accurately.In this case, an actuator <strong>with</strong> adaptable compliance canact stiff during precise positioning at low speeds (graspingand placing an object) and compliant when positioningis not as important when moving at higherspeeds (moving from one position to another) [3].u Most robotic toys are actuated by stiff electrical drives.This inflexible movement results in the typical artificialway <strong>of</strong> moving and interacting. Especially for cuddlytoys such as Huggable [4] or Anty [5], a compliant,natural movement is preferred. When children play<strong>with</strong> these toys, they can impose motions on it thatare different from the desired-controlled motion,which can damage the drive mechanism. <strong>Compliance</strong>in actuation can prevent damage from occurring andgive the cuddly toys a more natural feeling. Adaptablecompliance can also be used to emphasize emotions,e.g., anger by making the joints stiffer or fatigue bymaking the joints more compliant.u Gait rehabilitation is generally aided by multiple physicaltherapists, resulting in expensive sessions—limitedin time—which extends the overall rehabilitationprocess. Therefore, robots that can assist in the rehabilitationprocess are being proposed, e.g., Lokomat [6]and Autoambulator, which impose gaitlike motionpatterns to the legs <strong>of</strong> a patient. Paraplegic patientsand stroke survivors <strong>of</strong>ten suffer from severe spasms.When using stiff actuators, undesired motions, such asthose caused by spasms, can cause large actuator forcesthat could potentially harm the leg. Adding complianceto the actuation system can naturally absorb largeposition errors, thus preventing damage to the systemand insuring safety <strong>of</strong> the wearer.Additionally, in the beginning <strong>of</strong> the rehabilitation process,a relatively low stiffness might be preferred for safety, and stiffnesscould be gradually raised when the patient has regained acertain level <strong>of</strong> control over their legs. The Automated LocomotionTraining using an Actuated Compliant RoboticOrthosis project (ALTACRO) [7] intends to build a gait rehabilitationrobot <strong>with</strong> adaptable compliance. This field is growingrapidly <strong>with</strong> many compliant systems: Bowden cables [8],gravity balanced systems [9], ankle devices that use series elasticactuators (SEAs) [10], and robotic tendons [11].Adaptable <strong>Compliance</strong> to Adjustthe Natural DynamicsBy adjusting the natural dynamics <strong>of</strong> a mechanical system, itwill have a natural motion close to the desired motion toreduce energy consumption. Some application examplesinclude the following:u Robotic prosthesis: many prostheses manufacturers focus onthe enhancement <strong>of</strong> comfort for the user, but the stiffness<strong>of</strong> their designs is fixed. For example, in a transtibialprosthesis, the compliance is fixed during the designphaseandsettoanaveragevalue,suchthatthenaturalfrequency <strong>of</strong> the device is fixed. Thus, only for a certainstiffness <strong>of</strong> the ground and walking speed, this devicewill allow a comfortable feeling for the user. In contrast,when the compliance is adaptable, it can be chosen toobtain an optimal behavior for a wide range <strong>of</strong> circumstancesand desired motions. Besides the improvementsto enhance the comfort, research to optimize energyefficiency and avoid pathologies due to incorrect gaitpatterns has started. Today, most prostheses are still passive,but more advanced systems are being developed,which have an actuator and a compliant element, suchastheworkbyAuetal.[12]andHittetal.[13].u Walking and running robots: an actuator <strong>with</strong> adaptablecompliance extends the capabilities <strong>of</strong> these devices.The setting <strong>of</strong> the compliance can be used to maximizethe amount <strong>of</strong> energy, which can be stored duringtouchdown <strong>of</strong> the feet and released during push-<strong>of</strong>f. Inaddition, by varying the stiffness <strong>of</strong> the joints, the natural82 IEEE Robotics & Automation MagazineSEPTEMBER 2009
frequency <strong>of</strong> the system can be adjusted to allow sloweror faster walking [14]–[17].The goal <strong>of</strong> this article is to provide an overview <strong>of</strong> existingcompliant actuator designs and categorize the actuator designsinto four main groups to develop a standard terminology.Neither specific applications <strong>of</strong> these devices nor their appliedcontrol approaches will be discussed in any detail.Compliant <strong>Actuators</strong>To define what a compliant actuator is, a definition <strong>of</strong> a noncompliantactuator —better known as a stiff actuator—is useful.A stiff actuator is a device that is able to move to a specificposition or to track a predefined trajectory. Once a position isreached, it will remain at that position, whatever the externalforces exerted on the actuator (<strong>with</strong>in the force limits <strong>of</strong>the device).A compliant actuator, on the other hand, will allow deviationsfrom its own equilibrium position, depending on theapplied external force. The equilibrium position <strong>of</strong> a compliantactuator is defined as the position <strong>of</strong> the actuator where theactuator generates zero force or zero torque. This concept isspecifically introduced for compliant actuators, since it doesnot exist for stiff actuators.Some remarks must be made concerning terminology.Because compliance is the opposite <strong>of</strong> stiffness, both the termsare used to describe the compliant or nonstiff behavior <strong>of</strong> anactuator. To describe an actuator <strong>with</strong> a variable stiffness, theterm adjustable compliance can be used; variable compliance,adjustable stiffness, and controllable stiffness are also used.These examples are given to show that there is no standardterminology (yet) to describe these types <strong>of</strong> actuators. Throughoutthis article, a number <strong>of</strong> existing designs are described usingthe terminology used by the inventors. We prefer controllablestiffness because the term fits <strong>with</strong> our groupings explainedlater.<strong>Passive</strong> compliant actuators contain an elastic element, i.e.,a spring that can store energy—which is not the case for actuators<strong>with</strong> active compliance, where the controller <strong>of</strong> a stiffactuator mimics the behavior <strong>of</strong> a spring [18]. The latter hasthe disadvantage that no energy can be stored in the actuationsystem, and because <strong>of</strong> the limited bandwidth <strong>of</strong> the controller,no shocks can be absorbed. An advantage <strong>of</strong> active complianceis that the controller can make the compliance online adaptable.Online adaptability means that the compliance can beadapted during normal operation. In this review article, wewill not focus on active compliant actuators.The stiffness <strong>of</strong> an actuator is comparable <strong>with</strong> the stiffness<strong>of</strong> a linear spring. The variation <strong>of</strong> the length <strong>of</strong> a linear springdepends on the force acting on the spring, according toHooke’s Law:F ¼ k (x x 0 ): (1)This means that a spring <strong>with</strong> rest length x 0 and an actuallength x generates a force F. If the actual length equals the restlength, zero force is generated. This is comparable <strong>with</strong> a compliantactuator at its equilibrium position. When a spring <strong>with</strong>Pneumatic muscles are actuators<strong>with</strong> a high power-to-weight ratioand can be directly coupled to thejoint <strong>with</strong>out a heavy and complexgearing mechanism.linear force-displacement characteristic is used, the stiffness—inverse <strong>of</strong> the compliance—can be defined ask ¼ F ¼ constant: (2)DxWhen the force-displacement relationship is nonlinear, thestiffness is considered to vary <strong>with</strong> the positionk(x) ¼ dF 6¼ constant: (3)dxFor a spring, the equilibrium position is fixed and is equalto its free length. However, a compliant actuator can changethis position by moving the attachment point <strong>of</strong> the spring.An example <strong>of</strong> a passive compliant actuator is the originalSEA [19], which is a spring in series <strong>with</strong> a stiff actuator. Thecompliance <strong>of</strong> this actuator is fixed and determined by theselection <strong>of</strong> the spring; thus, the physical compliance cannotbe changed during operation. Further discussion about theSEA will be provided in a later section.It is worth mentioning that this discussion about compliantactuators is restricted to conventional actuators used in themajority <strong>of</strong> robotic and automated mechanical systems, e.g.,hydraulic, pneumatic, and electric actuators. Recently, advancesin material technology have introduced new substances,making it possible to build structurally strong articulated mechanismsthat are compact and lightweight. Examples <strong>of</strong> suchmaterials that can be used to develop novel actuators are shapememoryalloys (SMAs) [20], electrorheological fluids (ERFs)[21], electrostrictive and magnetostrictive materials (includingpiezoelectric substances) [22], and electroactive polymers [23].The use <strong>of</strong> these new materials as compliant actuators is notobvious, since their current operational speeds are very low,<strong>with</strong> response times in the scale <strong>of</strong> tens <strong>of</strong> seconds.<strong>Actuators</strong> <strong>with</strong> a fixed compliance can be used for forcecontrol [19] or safe human–robot interaction [3], but they donot control the natural frequency <strong>of</strong> a mechanical system. Asexplained in the ‘‘Adaptable <strong>Compliance</strong> to Adjust the NaturalDynamics’’ section, controlling the natural frequency can bedone by introducing adaptable, passive compliance.One way to vary the compliance <strong>of</strong> an actuator is by s<strong>of</strong>twarecontrol <strong>of</strong> a stiff actuator [17]. Based on the measurement <strong>of</strong> theexternal force or torque, a certain deviation is calculated by thecontroller and set by the stiff actuator. This type <strong>of</strong> compliantactuator requires an actuator, a sensor, and a controller that areall fast enough for the application, but it permits the adjustmentSEPTEMBER 2009 IEEE Robotics & Automation Magazine 83
The compliance adjustment <strong>of</strong> theJack Spring mechanism is achievedby adding or subtracting the number<strong>of</strong> available coils used in a spring.<strong>of</strong> the compliance during operation. Thus, the characteristic <strong>of</strong>an imitated spring is programmed and as such is adjusted online;this is <strong>of</strong>ten referred to as active compliance. The main disadvantage<strong>of</strong> active compliance is continuous energy dissipation,whereas energy could be stored and subsequently released againwhen a passive element (e.g., a spring) is used.To combine energy storage and adaptable compliance, anelastic element to store energy is needed, together <strong>with</strong> a way toadapt the compliance. A substantial number <strong>of</strong> designs has beendeveloped. However, four main ideas can be distinguished.u Equilibrium-controlled stiffness: these compliant actuatorsuse a fixed stiffness spring in series <strong>with</strong> a traditionalmethod <strong>of</strong> actuation, e.g., electric motors or hydraulicsystems. The SEA measures the displacement <strong>of</strong> theunit and force on the spring to adjust the torque suppliedby the motor, otherwise known as impedancecontrol. To obtain variable stiffness, the virtual stiffness<strong>of</strong> the actuator is adjusted by dynamically adjusting theequilibrium position <strong>of</strong> the spring as is explained inthe ‘‘Equilibrium-Controlled Stiffness’’ section.u Antagonistic-controlled stiffness: two actuators <strong>with</strong> nonadaptablecompliance and nonlinear force-displacementcharacteristics are coupled antagonistically, workingagainst each other. By controlling both actuators andusing nonlinear springs, the compliance and equilibriumposition <strong>of</strong> this antagonistic setup can be set. Tobe able to vary the compliance, it is required that thespring characteristic <strong>of</strong> the two actuators is non-linear,while the resulting spring characteristic is linear. Inthe ‘‘Antagonistic-Controlled Stiffness’’ section, thisprinciple is described in more detail and some examplesare given.u Structure-controlled stiffness: unlike the previous twoconcepts, structure control modulates the effectivephysical structure <strong>of</strong> a spring to achieve variations instiffness. When using a beam as elastic element, thestiffness depends on material modulus, the moment <strong>of</strong>inertia, and the effective beam length. During operation,the stiffness can be controlled by adjusting one <strong>of</strong>these parameters. In the Jack Spring, the number <strong>of</strong>active coils in a helical spring is adjusted to vary the+F desiredΣ Controller−F loadActuatorSpringSensorFigure 1. Force control using a series elastic actuator.Loadstiffness. More about these types <strong>of</strong> designs can befound in the ‘‘Structure-Controlled Stiffness’’ section.u Mechanically controlled stiffness: similar to structure control,mechanical control also adjusts the effective physicalstiffness <strong>of</strong> the system. However, in this case, thefull length <strong>of</strong> the spring is always in use. The variationis done by changing the pretension or the preload <strong>of</strong>the spring, as is the case in the mechanically adjustablecompliance and controllable equilibrium positionactuator (MACCEPA) and the variable stiffness joint(VS-Joint). These actuators require only one compliantelement. The complete actuator behaves as a torsionspring where the spring characteristics and equilibriumposition can be controlled independently during operation.The principles and designs are elaborated in the‘‘Mechanically Controlled Stiffness’’ section.<strong>Passive</strong>, Controllable Stiffness <strong>Actuators</strong>Equilibrium-Controlled StiffnessThis section starts <strong>with</strong> a description <strong>of</strong> the SEA, which isforce controlled and has a fixed compliance. Then, an example<strong>of</strong> a SEA variant <strong>with</strong> a second spring used in parallel isgiven. Finally, the concept <strong>of</strong> equilibrium-controlled stiffnessis explained.Series Elastic ActuatorThe SEA [19] is essentially a spring in series <strong>with</strong> a stiff actuator.The compliance is determined by the spring constant andis therefore not adjustable during operation. The SEA is acompliant actuator allowing force to be controlled in an easymanner. Figure 1 shows a typical setup <strong>of</strong> a SEA for force control.The elongation <strong>of</strong> the spring is used as force measurementand fed back in the control loop.SEA VariantAu et al. at Massachusetts Institute <strong>of</strong> Technology (MIT) [24]developed a prosthetic ankle-foot device that uses a variant <strong>of</strong>the SEA in a parallel configuration <strong>with</strong> a passive unidirectionalspring that is elongated when the ankle angle is less thanzero degrees (ankle dorsiflexed). The stiffness <strong>of</strong> the parallelspring is chosen by estimating the slope <strong>of</strong> the measured torque-anglecurve and is also used to reduced shock loads. Theparallel stiffness is also selected to increase the required openloopforce-bandwidth.Equilibrium-Controlled Stiffness ConceptSugar has also developed a spring-based actuator, which usesthe concept <strong>of</strong> equilibrium-controlled stiffness. A linear springis added in series to a stiff actuator, and the equilibrium position<strong>of</strong> the spring is controlled to exert a desired force ordesired stiffness [11], [25]. The compliance is actively changedusing a control law instead <strong>of</strong> fixing the compliance by passivelyadding springs. The force-control problem is convertedto a position-control problem using electric motors. Themotor position is adjusted based on the deflection <strong>of</strong> the springto alter the tension or compression <strong>of</strong> the spring.84 IEEE Robotics & Automation MagazineSEPTEMBER 2009
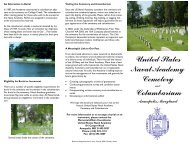
The intrinsic spring stiffness cannot be altered, but the linkor limb stiffness can be selectively varied using an active controllaw, therefore adjusting the virtual stiffness. Figure 2explains the control <strong>of</strong> a single actuator. The force applied bythe link is given byF ¼ K act (l s a), (4)where l is the length <strong>of</strong> the actuator, s is the length <strong>of</strong> the internalball screw that adjusts the equilibrium position <strong>of</strong> thespring, and a is the free length <strong>of</strong> the spring. K act is the intrinsicspring stiffness. If a desired behavior is given byF F o ¼ K des (l l o ), (5)about an operating point (F o , l 0 ), the desired actuator positionis given bys des ¼ l a þ (F 0 K des (l l 0 ))=K act : (6)Thus, a position-control scheme achieves the stiffness control<strong>of</strong> a single compliant limb. Controlling the position <strong>of</strong> dcmotors is very simple and differs from the work by Pratt wherethey controlled the torque on the motors and, in turn, controlledthe impedance. The disadvantages <strong>of</strong> using an approachto control the virtual stiffness are that the performance islimited by the bandwidth <strong>of</strong> the controller (e.g., during impactthe hardware stiffness will be felt), and it consumes energy toadjust the position <strong>of</strong> the spring. One overlooked advantage isthat the compliant spring acts to passively change the transmissionratio <strong>of</strong> the system. For example, if a force compresses thespring to the left and the desired behavior is to move the limbto the right, then as the spring compresses, the motor mustspin faster thus increasing the transmission ratio at the opportunemoment.Antagonistic-Controlled StiffnessThe best-known example <strong>of</strong> an antagonistic setup is the combination<strong>of</strong> biceps and triceps in the human arm. When thebiceps contracts and the triceps relaxes, the arm is flexed. Whenthe triceps contracts and the biceps relaxes, the arm extends.One <strong>of</strong> the reasons why an antagonistic setup is required is thefact that muscles can only pull and not push. However, morecan be achieved <strong>with</strong> this setup: when both biceps and tricepscontract, the elbow becomes stiff; when they both relax, theelbow becomes very compliant and the arm hangs freely. Inreality, the muscles in the human arm are controlled in acontinuous way and, thus, the system can cover a whole range<strong>of</strong> positions and compliant behavior. The biologically inspiredconcept <strong>of</strong> an antagonistic setup is used in a number <strong>of</strong>mechanical actuators to obtain adaptable compliance.The Necessity <strong>of</strong> Nonlinear SpringsThe nonlinearity <strong>of</strong> the spring is essential to obtain the adaptablecompliance. To explain this, a simple linear antagonisticsetup (Figure 3) is used. The two springs are linear and havethe same spring constant. In Figure 3, x 0A and x 0B are the<strong>Adjustable</strong>, passive, compliantactuators will rise in importance fortwo reasons, safe human/machineinteraction, and energy savings.controllable positions when zero force is applied by thesprings (the rest length <strong>of</strong> both springs is assumed zero). Eachposition can be independently controlled requiring twoactuators. The force on the block in the center is the sum <strong>of</strong>the forces <strong>of</strong> both springs:The stiffness becomesF ¼ k(x x 0A ) þ k(x 0B x)¼ 2kx þ k(x 0A x 0B ): (7)j ¼ dF ¼ 2k: (8)dxThis result is independent <strong>of</strong> the controllable parametersx 0A and x 0B , and consequently, the compliance is uncontrollableif linear springs are selected.When two springs <strong>with</strong> a quadratic characteristic are used,the force isx 0AF ¼ k(x x 0A ) 2 þ k(x 0B x) 2¼ 2kx(x 0A x 0B ) þ k(x 2 0B x 2 0A ): (9)x(a)sFigure 3. Demonstration <strong>of</strong> the necessity <strong>of</strong> using nonlinearsprings.(b)(c)x 0Ba = Free LengthK actFigure 2. System for one limb. The limb length is measuredby l, whereas the internal motor adjusts the length s. Thecompliance <strong>of</strong> the limb is adjusted by varying the length s.lSEPTEMBER 2009 IEEE Robotics & Automation Magazine 85
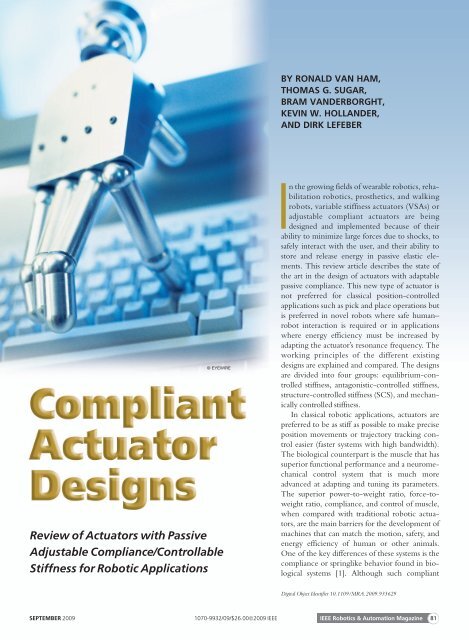
AntagonistServoβ0°0°αAgonistServoRφNFRoller GuideBall BearingRollerFrameF SR SX 2X 1R SAppliedForceY c Y r0°θX rX cContact PointRollerTrajectoryT loadR J(a) (b) (c)Figure 4. (a) Picture <strong>of</strong> setup. (b) Schematic drawing <strong>of</strong> the antagonistic setup <strong>of</strong> two SEA. (c) Schematic <strong>of</strong> a quadratic springdevice. With permission from Migliore.The local stiffness is thenj ¼ dFdx ¼ 2k(x 0A x 0B ): (10)As can be seen, the stiffness is a linear function <strong>of</strong> the differencebetween the controllable parameters. The equilibriumposition is the position where no forces are generated:2kx(x 0A x 0B ) þ k(x 2 0B x 2 0A ) ¼ 0, (11)) x ¼ x2 0A x 2 0B2(x 0A x 0B ) ¼ x 0A þ x 0B: (12)2This result is the average <strong>of</strong> x 0A and x 0B . Thus, by controllingthe two positions x 0A and x 0B , both compliance andequilibrium position can be set. This principle is used in anumber <strong>of</strong> different designs, which are described in the followingsections.Biological Inspired Joint Stiffness ControlMigliore et al. [25] describe a device based on the antagonisticsetup <strong>of</strong> two nonlinear springs. This biologically inspired joint4 48 1 92371 910 32875 6(a) (b) (c)aR, q a R, q bL b,a l2 r L b,a l2α F sDFigure 5. (a) and (b) Two CAD views <strong>of</strong> the VSA and (c) mechanism to make thesprings nonlinear in the VSA. With permission from Tonietti.l sk sstiffness control is a rotational joint, actuated by two SEAs asshown in Figure 4(a) and (b).Figure 4(c) shows how the linear characteristic <strong>of</strong> the springis transferred into a quadratic characteristic, by using specialshaped pieces, over which two wheels roll. The centers <strong>of</strong> thewheels are interconnected by a linear spring.When both servomotors rotate in the same direction, theequilibrium position <strong>of</strong> the joint is changed. When theyrotate in the opposite direction, the stiffness <strong>of</strong> the joint willbe changed.The advantage <strong>of</strong> this design is that the force-elongationcharacteristic <strong>of</strong> the springs is chosen during the design phase,as well as the resulting compliance characteristic <strong>of</strong> the overallsystem. The drawback is the size, extra complexity, and friction<strong>of</strong> the mechanisms to make the quadratic springs. Othersystems using antagonistic quadratic springs include the workby Koganezawa [26] and English [27].Variable Stiffness ActuatorTonietti et al. [28] describe the VSA. This design is based onthe same antagonistic setup. However, it is not as obvious as theprevious design. In Figure 5(a) and (b), two computer-aideddesign (CAD) views <strong>of</strong> the VSA are shown. The VSA consists<strong>of</strong> three pulleys 1, 2, and 3 over which atiming (toothed) belt 10 is placed. Two<strong>of</strong> the pulleys 2 and 3 are controlled,bh b,aeach by a servomotor 5 and 6. The otherpulley 1 is connected to the arm 4. Onthe belt between the pulleys, three tensioningmechanisms 7, 8, and 9 areplaced. Although all three tensioningmechanisms are equal, their function isdifferent. The two tensioning mechanisms8 and 9, neighboring the pulleyconnected to the arm, form the nonlinearsprings. The other mechanism 7 is86 IEEE Robotics & Automation MagazineSEPTEMBER 2009
just a tension mechanism to keep the timing belt 10 against theother two pulleys.One can see that the VSA is actually made <strong>with</strong> two SEAs:2, 5, 8 and 3, 6, 9. The two springs 8 and 9 <strong>of</strong> each SEA are linear,but because <strong>of</strong> the tensioning mechanisms, they are madenonlinear. The mechanism that makes the springs nonlinear isshown in Figure 5(c). The big circle on the left represents thepulley <strong>with</strong> the radius arm 1, and the big circle on the right iseither pulley 2 or 3, depending on the considered SEA. As seenfrom Figure 5(c), the length <strong>of</strong> the spring is a nonlinear function<strong>of</strong> the length <strong>of</strong> the belt between the two pulleys. Thecomplete formula for the torque can be found in [28].To make the VSA stiffer, pulley 2 <strong>with</strong> motor 5 has to rotatecounterclockwise, and pulley 3 <strong>with</strong> motor 6 has to rotateclockwise. As a result, the two springs in the mechanism 8 and9 are compressed, and spring 7 elongates to keep the belt tightagainst the pulleys. When rotating both pulleys 2 and 3 in thesame direction, the spring’s length does not change, and assuch, the compliance will stay the same, but the equilibriumposition will change. As is the case for each antagonistic setup,both actuators have to be used to influence only one variable:compliance or equilibrium position.The control <strong>of</strong> the VSA is more complicated than theprevious design, since the nonlinearity is more complex. TheVSA described in this section is the first generation concept.The researchers are working currently on a more compactimplementation, the VSA-II.Other similar systems include an actuator, employing biomimeticresearch that was developed by Kolacinski and Quinn[29]. Their actuator can modulate the position and stiffness,although the system’s stiffness law is very complicated. TheFlexCVA [30] uses a mechanism similar to that shown in Figure5(c) to create nonlinear springs.Actuator <strong>with</strong> Mechanically <strong>Adjustable</strong>Series <strong>Compliance</strong>Another design based on the same principle is the actuator <strong>with</strong>mechanically adjustable series compliance (AMASC) developedby Hurst et al. [31]. As shown in Figure 6, the AMASC is arather complex mechanism <strong>with</strong> a great number <strong>of</strong> pulleys andcables. Nevertheless, the advantage is that only one actuator isused to control compliance or equilibrium position. Thus, each<strong>of</strong> the actuators has its specific function, allowing different motortypes to optimize the weight <strong>of</strong> the completesystem. The working principle isbased still on the antagonistic setup <strong>of</strong>two nonlinear springs.In Figure 6(b), a schematic overview<strong>of</strong> the AMASC is given. The springs F Yare two fiberglass leaf springs, which areplaced on both sides <strong>of</strong> the prototype[Figure 6(a)]. In the case <strong>of</strong> the AMASC,the nonlinear spring is formed by a set <strong>of</strong>spiral pulleys. The reduction ratio <strong>of</strong> thepulleys varies proportionally <strong>with</strong> thefiberglass spring deflection to obtain thequadratic relationship. The pulleys are(a)also used to uncouple the control <strong>of</strong> compliance and equilibriumposition.The leg <strong>of</strong> the actuator is placed on pulley J 2 . One motorcontrols the angle h 1 <strong>of</strong> pulley J 1 , which is the setting for theequilibrium position. When this motor turns counterclockwise,the set <strong>of</strong> floating pulleys Z A will move to the left, andthe set <strong>of</strong> floating pulleys Z B will move to the right. Thismotion will result in a counterclockwise rotation <strong>of</strong> the leg,which is connected to pulley J 2 . All this can be done <strong>with</strong>outchanging the lengths <strong>of</strong> the springs, thus keeping the complianceconstant.On the other hand, when the displacement X 3 —controlledby the second motor—moves to the left, both sets <strong>of</strong> pulleysZ A and Z B will also move to the left. This will elongate bothsprings, and thus make the joint stiffer, while the equilibriumposition is kept constant.The AMASC is an actuator where the compliance and theequilibrium position can be controlled independently, each bya dedicated motor. This independence makes the control easierand allows one to design the two motors separately to meetthe demands <strong>of</strong> a specific application, e.g., compliance variesslowly while the equilibrium position has to be set faster. Themain disadvantage <strong>of</strong> the AMASC is its complexity. Based onthis concept, the biped robot BiMASC is designed. Here, thestiffness <strong>of</strong> the whole leg can changed instead <strong>of</strong> the stiffness <strong>of</strong>the joints. Thorson [32] developed a linear variant where control<strong>of</strong> equilibrium position and stiffness are adjusted by twoseparate motors.Pneumatic Artificial MusclesInstead <strong>of</strong> using a SEA, pneumatic artificial muscles (PAMs)are <strong>of</strong>ten used. When pressurized, the muscle contracts axiallywhile expanding radially. The compressibility <strong>of</strong> air makesthem inherently compliant, behaving in a spring-like fashion.The McKibben muscle [33] is the most well-known design.Its overall shape resembles a thin cylinder, which is easy to usein robotic devices. One <strong>of</strong> the drawbacks is the hysteresisintroduced by friction, which makes it difficult to control,and it has a substantial threshold <strong>of</strong> pressure, before any forceis generated. The pleated PAM (PPAM) [34] drasticallyreduces hysteresis and overcomes the threshold <strong>of</strong> pressure.Figure 7 shows an implementation <strong>of</strong> the PPAM in the bipedLucy [34].Y AZ A , F ZAF Y (Y A )G(Zθθ A )21legBJ 1 B 21 r1 J 2 r 2 τ legτ motorG(Z B ) FY (Y B )Z B , F ZBX 3 Y B(b)Figure 6. (a) Picture <strong>of</strong> AMASC [31] and (b) schematic overview <strong>of</strong> AMASC, basedon [31].SEPTEMBER 2009 IEEE Robotics & Automation Magazine 87
High-PressureTubingAngularPositionLimiterTo AirSupplyCompressedAir Bufferthe angle <strong>of</strong> bending or slope. In this representation <strong>of</strong> bending,the term EI/L represents the bending stiffness. To controlthe stiffness <strong>of</strong> the structure, any <strong>of</strong> the three parameters in thisbending stiffness can be manipulated.The parameter E is a material property, which cannot becontrolled by a structural change, but for some materials, it canbe changed by changing the temperature. In most instances,the temperature <strong>of</strong> such a material cannot be changed fastenough to be useful to create adaptable compliant actuators forbipedal walking. Examples <strong>of</strong> mechanisms where the moment<strong>of</strong> inertia I and the length <strong>of</strong> the elastic element L are changedare discussed in the following sections.Pneumatic muscles are actuators <strong>with</strong> a high power-toweightratio and can be directly coupled to the joint <strong>with</strong>out aheavy and complex gearing mechanism. The drawbacks <strong>of</strong> ajoint actuated by two pneumatic muscles are the nonlinearcharacteristic <strong>of</strong> the joint, slow dynamics (especially depressurizingthe muscle is slow), presence <strong>of</strong> hysteresis, and need forpressurized air.Structure-Controlled StiffnessAs an alternative to the antagonistic setup <strong>of</strong> two nonlinearsprings, variations in stiffness can also be achieved throughmanipulation <strong>of</strong> the effective structure <strong>of</strong> a spring, also calledSCS [35]. As an example, bending a leaf spring is a form <strong>of</strong>storing energy. However, apart from simple loading (energystorage) and unloading (energy return) <strong>of</strong> the leaf spring, anextra step <strong>of</strong> altering the leaf spring’s effective stiffness is introduced.To understand the basic concepts <strong>of</strong> a SCS actuator,consider the small deflection beam equationM ¼ExhaustFigure 7. Antagonistic setup <strong>of</strong> two PPAM.Low-PressureTubingEI 3 h, (13)Lwhere M is the bending moment, E the material modulus, Ithe moment <strong>of</strong> inertia, L the effective beam length, and h is(a) (b) (c)Figure 8. Variation <strong>of</strong> moment <strong>of</strong> inertia by rotating the beam.Variation <strong>of</strong> Moment <strong>of</strong> Inertia by Axial RotationAn actuator can be built that has a passive element <strong>with</strong>variable mechanical impedance, resulting in an actuator <strong>with</strong>adaptable compliance. For example, when the aspect ratio <strong>of</strong> abeam differs from one, then compliance can be changed byrotating the beam over 90°. A prototype <strong>of</strong> a spring <strong>with</strong>variable stiffness used in wearable robotic orthoses [36] isshown in Figure 8. The purpose <strong>of</strong> the helical spring in thisdesign is to reduce the effects <strong>of</strong> lateral buckling.When the moment <strong>of</strong> inertia is calculated <strong>with</strong> the wellknownformula, it can be seen that it varies, depending onthe width-to-thickness ratio <strong>of</strong> the beam. Depending on therotation, the thickness and width have to be exchanged inthe formulathickness 3 width3I stiff ¼ (14)12width 3 thickness3I compliant ¼ (15)12This is a very easy way to obtain a compliant element <strong>with</strong>two predefined settings <strong>of</strong> the compliance. Because <strong>of</strong> thelateral buckling, it is difficult to have intermediate settings.Work by Seki et al. [37] have employed a concept similar tothe rotated leaf spring approach, although these authors didnot account for beam deflections beyond 15° in experimentsnor did they address the limitations because <strong>of</strong> lateral buckling.Union Is Strength: Increasing the Moment <strong>of</strong> InertiaKawamur changed the moment <strong>of</strong> inertia by controlling theforce to press together an element consisting <strong>of</strong> many layeredsheets [38] as shown in Figure 9(a). When external forces acton the element, the loose stack <strong>of</strong> sheetsbend, as is depicted in Figure 9(b).However, if the sheets are firmlypressed together, they will not slip because<strong>of</strong> friction. As a result, the elementstiffens, and larger forces are needed tobend the element. Different methods <strong>of</strong>pressing the sheets together such as electrostatic[39] or vacuum [38] can beused. To be able to create a vacuum, thesheets are covered <strong>with</strong> a rubber or vinylsheet to make an airtight chamber. By88 IEEE Robotics & Automation MagazineSEPTEMBER 2009
decreasing the pressure in the chamber, the atmospheric pressuregenerates a normal force on the sheets. It should be notedthat holding the sheets together is very difficult because thetransverse shear forces are very high.To estimate the variation <strong>of</strong> compliance <strong>of</strong> the element, themoment <strong>of</strong> inertia in both the normal and vacuumed state canbe calculated. Consider that the number <strong>of</strong> sheets is n. The systemis compliant when the sheets are separated. When thevacuum is applied, the system is stiff.n 3 width 3 thickness3I compliant ¼ (16)12width 3 (n 3 thickness)3I stiff ¼ (17)12Consequently, the stiffness <strong>of</strong> the element can be increasedby a factor n 2 when vacuum is applied. This is an effectivemethod to obtain a large stiffness range since the number <strong>of</strong>sheets can be increased easily when using thin sheets such asfilms. Based on the same idea, a two-dimensional variant canbe made using wires <strong>with</strong> a square cross section [38].The advantages <strong>of</strong> this system are the simple constructionand wide stiffness range that is possible. However, the frictionmakes the precise control <strong>of</strong> the compliance difficult. Moreover,the compliance will depend on the deflection when thevolume is in a vacuum applied state.Mechanical Impedance AdjusterAnother way to adjust the compliance is to vary the effectivelength <strong>of</strong> a compliant element. An active knee brace varies thelength <strong>of</strong> beam to adjust the stiffness [36]. Figure 10 depicts themechanical impedance adjuster [40]. The compliant elementis a leaf spring connected to the joint by a wire and pulley. Theeffective length <strong>of</strong> the spring can be changed by a slider. Aroller is placed on the slider to hold the leaf spring close to thestructure. The motor rotates the feed screw, which moves theslider, and thus changes the compliance.A rotational version was developed [41] for implementationin a robotic joint. In Figure 11, a conceptual drawing <strong>of</strong> theproposed design is shown. Figure 11(a) and (b) shows the situationwhen the mechanism is compliant and stiff, respectively.The two vertical spindles, which are actuated by a motor, canmove the slider up and down. The four wheels placed on theslider roll over the leaf spring. When the slider is movedupward, the effective length <strong>of</strong> the leaf spring is shortened.An advantage <strong>of</strong> both <strong>of</strong> these mechanisms is that they areeasy to construct. They are easy to control because the setting<strong>of</strong> the compliance and the equilibrium position are completelyindependent. This mechanism allows all possibleintermediate states between compliant and very stiff. Thisimplies one actuator for the compliance and one actuator forthe equilibrium position can be used to allow independentcontrol. Similar devices include the following example. DeUri Tasch designed a two-degree-<strong>of</strong>-freedom finger, whichagain uses leaf springs, but has the ability to control thecoupling compliance as well [42].Jack Spring ActuatorRecently, a new type <strong>of</strong> actuator, based on the structure controlledstiffness concept, was presented in [43], named the JackSpring actuator. A helical spring is used as the compliant element.It should be noted that, because a helical spring has thesame geometry as a lead screw or jack screw, the mathematicsto describe a lead screw can be used to describe a Jack Spring.The main difference is that the lead <strong>of</strong> the Jack Spring changesunder an applied axial load.The compliance adjustment <strong>of</strong> the Jack Spring mechanismis achieved by adding or subtracting the number <strong>of</strong>available coils used in a spring. The basic concept for theadjustment <strong>of</strong> stiffness can be seen in the equation <strong>of</strong> thespring constant (stiffness):K ¼Gd48 3 D 3 n a, (18)where G represents a material property called shear modulus.Each <strong>of</strong> the parameters <strong>of</strong> (18) influences the stiffness <strong>of</strong> acoiled spring. In particular, an increase in wire diameter, d, willincrease stiffness, whereas either an increase in coil diameter,D, or number <strong>of</strong> active coils, n a , will decrease spring stiffness.Therefore, to create a SCS device, based on the properties <strong>of</strong> aLeaf SpringMotorWireFeed ScrewTo JointSliderPulleyFigure 10. Conceptual design <strong>of</strong> mechanical impedanceadjuster.F(a)Figure 9. (a) Laminated structure and (b) deformation.(b)(a)Figure 11. Conceptual design <strong>of</strong> rotational mechanicalcompliance adjuster.(b)SEPTEMBER 2009 IEEE Robotics & Automation Magazine 89
ActiveCoilRegionInactiveCoilRegion(a)Fcoil spring, any <strong>of</strong> these parameters could potentially beadjusted. The simplest parameter to change and adjust stiffnessis the number <strong>of</strong> active coils, n a . A conceptual diagram <strong>of</strong> thisapproach can be seen in Figure 12.The diagram shows an extending helical spring or JackSpring. Through a rotation <strong>of</strong> either the spring or the shaft/nut, coils can be added to or subtracted from the number <strong>of</strong>active coils, thus changing the effective stiffness <strong>of</strong> the structure.In this example, both displacement and stiffness are coupled.The Jack Spring actuator is novel, compact, and easy toimplement. The external force can act in both directions. Incombination <strong>with</strong> a stiff actuator, both compliance andequilibrium position are adaptable. However, both are coupledin this first concept. Moreover, setting the compliance, whileforces are working on the spring, results in friction and deformation<strong>of</strong> the space where the surface has to slide but the torquethat is required is reduced in compression. Also, if rollingpins are used, the system is similar to a ball screw instead <strong>of</strong> alead screw. In a second concept, a second motor can be used totranslate the Jack Spring. In this concept, one motor is used toadjust the equilibrium position <strong>of</strong> the actuator, and a secondmotor is used to adjust the stiffness.Mechanically Controlled StiffnessSimilar to structure control, mechanical control also adjuststhe effective physical stiffness <strong>of</strong> the system. However,mechanical control adjusts stiffness by varying the pointswhere a compliant element is attached to the structure, thuschanging the pretension or preload <strong>of</strong> the spring.XDatumDatumFigure 12. Active and inactive coil region in the Jack Spring actuator.(b)axis 8. The lever arm 3 is also placed onthe same rotational axis. The position <strong>of</strong>lever arm 3, relative to arm 1, can beτcontrolled by a servomotor 4. Thespring 7 generates a torque that tends toline up bodies 2 and 3. This restoringforce is transmitted by the cable 9 thatruns from a point on body 3 to a pointon body 2. Servomotors 5 and 6 rotatethe threaded spindles, which move thesepoints to or away from the rotationalaxis, resulting in shorter or longer leverarms and thus a lower or higher torque (or torsion stiffness).The spindle, powered by servomotor 5, also moves the pointwhere the spring 7 is attached. Figure 13(a) shows the situation<strong>with</strong> short lever arms, resulting in a joint <strong>with</strong> low stiffness. InFigure 13(b), the situation is shown where the lever arms arelonger, which makes the joint stiffer.The variation <strong>of</strong> the compliance is based on the variation <strong>of</strong>the length <strong>of</strong> the lever arms and uses only one passive element,which is fundamentally different from the antagonistic setupor structural-controlled stiffness. This design has a number <strong>of</strong>drawbacks. The use <strong>of</strong> three motors, <strong>of</strong> which two are controlledtogether, is expensive but difficult to avoid. It is possibleto reduce the number <strong>of</strong> motors by connecting both slidersusing a cable running through the rotational axis. However,this will result in a complex mechanism <strong>with</strong> considerable friction.For practical reasons, the two points that ensure tensioning<strong>of</strong> the cable cannot be placed at the same distance from therotational axis, resulting in nonlinearity <strong>of</strong> the torque-anglecharacteristic for small angles. For larger angles, the torqueanglecharacteristic will become nonlinear since the cable willfollow a straight line (a chord) instead <strong>of</strong> an arc <strong>with</strong> the rotationalaxis as the center. This nonlinearity is because the length<strong>of</strong> an arc is a linear function <strong>of</strong> the angle, which is not the casefor a chord.Also, the fact that friction occurs in the point where thecable is guided around arm 2, resulting in hysteresis, made thisdesign unfavorable, especially <strong>with</strong> respect to passive walking.A similar approach is presented in [44], where only the length<strong>of</strong> one <strong>of</strong> the lever arms is changed.Lever Arm Length AdjustmentA first type <strong>of</strong> actuator based on mechanical-controlled stiffnesswas developed at the Vrije Universiteit Brussel. As shownin Figure 13, the proposed system is a rotational joint consisting<strong>of</strong> grounded arm 1 and movable arm 2, connected by an2675(a)3 41982765(b)Figure 13. Variation <strong>of</strong> the length <strong>of</strong> the lever arms.3 4198MACCEPAStarting from the previous design, a new design was developed,named MACCEPA [45]. In Figure 14, the essentialparts <strong>of</strong> the MACCEPA are drawn. As can be seen, there arealso three bodies pivoting around one rotational axis.Around the rotational axis, a lever arm is pivoting, depictedas a smaller body in Figure 14. A spring is placed between afixed point b on the lever arm and a cable that runs around c(a fixed point on the right body) and is attached to a pretensionmechanism.The angle j between the lever arm and left body is set by aclassical actuator (e.g., a servomotor). When a—the anglebetween the lever arm and right body—differs from zero, theforce due to the elongation <strong>of</strong> the spring will generate a torqueT that tends to line up the right body <strong>with</strong> the lever arm.90 IEEE Robotics & Automation MagazineSEPTEMBER 2009
When the angle a is zero—this is the equilibrium position—the spring will not generate any torque. The equilibrium positionitself is determined by the value <strong>of</strong> j. A second classicalactuator present in the pretension mechanism at point b determinesthe length <strong>of</strong> the piece <strong>of</strong> cable between points c and b,thus setting the pretension <strong>of</strong> the spring. This pretension willinfluence the torque for a certain angle a, thus controlling thespring constant <strong>of</strong> the equivalent torsion spring used to modelthe device. In Figure 15, a CAD drawing <strong>of</strong> the MACCEPAprototype is shown.The advantages are that the MACCEPA actuator can bebuilt <strong>with</strong> standard <strong>of</strong>f-the-shelf components and that it has alinear angle-torque characteristic. The control <strong>of</strong> complianceand equilibrium position are fully independent, and these controlsignals are independent <strong>of</strong> the current position. However,the friction in the joint depends on the setting <strong>of</strong> the compliance,and the servomotors require some space in the structure.Recently, this novel concept is implemented on two bipedalwalking robots [14] and [46] and in an elbow rehabilitationdevice developed by Sulzer [47].VS JointAt DLR, the German Aerospace Center in Germany, anotherdevice based on mechanically controlled stiffness is developed:the VS-Joint [48]. Figure 16 shows a picture <strong>of</strong> thevariable stiffness part. The cam disk (lower part) is connectedto the joint. The vertical position <strong>of</strong> the spring base slider isdefined by the spindle that is actuated by the small motor forthe stiffness setting. This upper plate compresses the springs.The angular position <strong>of</strong> the upper plate is controlled by theposition motor.Figure 17 shows the unwinded schematic <strong>of</strong> the VS-Joint.The shaded part is one <strong>of</strong> the three cam disks, which are connectedto the joint, whereas the linear bearing in the figure isconnected to the upper plate and position motor. A roller ispushed by a spring to the lowest position in the cam disk.When a torque is applied on the joint, there will be a jointdeflection <strong>of</strong> the roller, e.g., to the right, as shown in Figure17(b), and pushing the roller upward causing a translationaldeflection <strong>of</strong> the springs. The spring pushes the roller downwards,which will generate a force in the direction <strong>of</strong> the lowestpoint <strong>of</strong> the cam disk. This lowest point is the equilibriumposition <strong>of</strong> the joint. By changing the position motor, theangle <strong>of</strong> the stiffness mechanism is adjusted, and thus also theposition where no torque is generated.BaαϕFigure 14. Working principle <strong>of</strong> the MACCEPA.cCbThe AMASC is an actuator wherethe compliance and the equilibriumposition can be controlledindependently, each bya dedicated motor.The advantage <strong>of</strong> this design is that can easily be integratedinto a robotic arm. The shape <strong>of</strong> the cam disk can be adjustedto obtain a progressive, degressive, or linear system behavior.Although one spring is enough, the VS joint uses three springsfor symmetry. It is also a design where two motors <strong>of</strong> differentsizes can be used: a small one for the stiffness preset and a morepowerful motor for the link position.Figure 15. CAD drawing <strong>of</strong> the MACCEPA prototype.StifferPresetTranslationalDeflectionJointDeflectionFigure 16. VS-Joint mechanism.Roller(a)LinearBearingCam DiskSpindleSpring Base SliderConnection toLinear BearingRoller SliderCam RollersCam Disk (Fixedto Circular Spline)Axis <strong>of</strong> RotationRoller Position<strong>of</strong> UndeflectedJointαFDeflection(b)Figure 17. (a) Unwinded schematic <strong>of</strong> the VS-Joint principle inequilibrium position and (b) deflected position.ΤSEPTEMBER 2009 IEEE Robotics & Automation Magazine 91
The variation <strong>of</strong> the compliance isbased on the variation <strong>of</strong> the length<strong>of</strong> the lever arms and uses only onepassive element, which isfundamentally different from theantagonistic setup or structuralcontrolledstiffness.Note that the VS-Joint and the MACCEPA actuator are ina way complementary, because, in the VS design, the spring isused in compression, whereas the latter uses the spring in tension.Both designs use the pretension or preload <strong>of</strong> the springto vary the stiffness, and both have one motor for the stiffnesssetting and one for the equilibrium position.Discussion and ComparisonComparing the different designs is not easy, because eachdesign might be optimized for a specific task or property.Table 1 gives an overview <strong>of</strong> some <strong>of</strong> the properties for the differentgroups <strong>of</strong> controllable stiffness actuators.These properties <strong>of</strong> each group are a generalization.Within each group, there are differences, and the describeddesigns might be optimized for a specific application. Otherdesign criteria to be taken into account are the complexity <strong>of</strong>the design, cost, speed <strong>of</strong> the stiffness variation, maximumtorque, and size <strong>of</strong> the complete system. In addition, therequired power source, e.g., in case <strong>of</strong> pneumatic muscles, canalso be a criterion.ConclusionsFour concepts to create adaptable, passive-compliant actuators,which can store energy and can be used for passiveapplications, are presented and examples are given. Thefirst concept, equilibrium-controlled stiffness, is based onadjusting the equilibrium position <strong>of</strong> springs. This conceptis simple to control but constantly requires energy to regulateits actuator position. The second concept, antagonistic-controlledstiffness, covers the compliant actuatorsbased on the antagonistic setup <strong>of</strong> two nonlinear springs.Again, in this system, extra work is needed to adjust thestiffness, because two nonlinear springs must be controlled.Table 1. An overview <strong>of</strong> some <strong>of</strong> the properties for the different groups<strong>of</strong> controllable stiffness actuators.1) Minimum number <strong>of</strong> springs required(can be more to obtain symmetry)2) Can linear springs be used (related toavailability, linear spring are standard)3) Always using the full length <strong>of</strong> the springelement4) Preload/Pretension in equilibrium position(= forces acting on joint in eq. pos.)5) Completely stiff setting possible (limitedby the force <strong>of</strong> the spring elongation)6) Vary compliant setting possible (conceptual,can lead to large designs)7) Infinite bandwidth for shock absorbance(compliant behavior at high speed)8) Infinite bandwidth for chosen compliance(stiffness controllable at high speed)9) Independent control stiffness andequilibrium position10) Possibility to vary linearity <strong>of</strong> the stiffnesscurveEquilibrium-ControlledStiffnessAntagonistic-ControlledStiffnessStructure-ControlledStiffnessMechanicallyControlledStiffness1 2 1 1Yes No Yes YesYes Yes No YesNo Yes No YesNo No Yes NoYes No Yes YesYes Yes Yes YesNo Yes Yes YesNo No/Yes Yes YesYes No Yes YesRemark on 4: This can be either positive or negative. Preload/pretension is positive to reduce or even avoid play and backlash;on the other hand, it generate forces on the structure and the bearings, which can lead to a heavier structure or wear.Remark on 9: Some designs <strong>of</strong> antagonistic setups allow independent control, however this results in a relatively complexdesigns.Remark on 10: In this way, a progressive, degressive, or linear system behavior can be chosen. In equilibrium-controlled stiffness,the motor feedback can be used to vary the desired stiffness curve as long as the control commands are <strong>with</strong>in the bandwidth <strong>of</strong>the motor. In a Jack Spring actuator, feedback can be used to add or subtract coils for a given deflection allowing the linearityresponse to vary.92 IEEE Robotics & Automation MagazineSEPTEMBER 2009
The third concept, structural-controlled stiffness, allowsadaptable compliance. The Jack Spring was presented,which actively tunes the intrinsic stiffness <strong>of</strong> the spring.The last concept is mechanically controlled stiffness, inwhich the MACCEPA and VS-Joint are novel actuators<strong>with</strong> independently controllable compliance and equilibriumposition.We believe that adjustable, passive, compliant actuators willrise in importance for two reasons, safe human/machineinteraction, and energy savings. Although different designs <strong>of</strong>compliant actuators are currently under investigation, theultimate design combining a stiffness range from completelystiff to zero stiffness, lightweight and compact, and easy tocontrol has not yet been invented. One can conclude that, inthe field <strong>of</strong> compliant actuation, much research is still possibleon the actuator itself, applications, and how to control theadjustable compliance. We hope to see more roboticists designingthe next generation <strong>of</strong> passive, compliant-actuatorsand their controller architectures.KeywordsControllable stiffness actuators, adjustable complianceactuators.References[1] R. Alexander, ‘‘Three uses <strong>of</strong> springs in legged locomotion,’’ Int. J.Robot. Res. (Special Issue on Legged Locomotion), vol. 9, no. 2, pp. 53–61,1990.[2] M. Zinn, O. Khatib, B. Roth, and J. Salisbury, ‘‘Playing it safe [humanfriendlyrobots],’’ IEEE Robot. Automat. Mag., vol. 11, no. 2, pp. 12–21,June 2004.[3] A. Bicchi and G. Tonietti, ‘‘Fast and s<strong>of</strong>t arm tactics: Dealing <strong>with</strong> thesafety-performance trade-<strong>of</strong>f in robot arms design and control,’’ IEEERobot. Automat. Mag., vol. 11, no. 2, pp. 22–33, 2004.[4] W. Stiehl, C. B. L. Lieberman, J. Breazeal, M. Lalla, and L. Wolf,‘‘Design <strong>of</strong> a therapeutic robotic companion for relational, affectivetouch,’’ in Proc. IEEE Int. Workshop on Robot and Human Interactive Communication(ROMAN’05), 2005, pp. 408–415.[5] J. Saldien, K. Goris, B. Vanderborght, B. Verrelst, R. Van Ham,and D. Lefeber, ‘‘Anty: The development <strong>of</strong> an intelligent huggablerobot for hospitalized children,’’ in Proc. 9th Int. Conf. Climbing andWalking Robots and the Support Technologies for Mobile Machines,2006.[6] S. Jezernik, G. Colombo, T. Keller, H. Frueh, and M. Morari,‘‘Robotic orthosis lokomat: A rehabilitation and research tool,’’ Neuromodulation,vol. 6, no. 2, pp. 108–115, Apr 2003.[7] P. Beyl, M. Van Damme, R. Van Ham, R. Versluys, B. Vanderborght,and D. Lefeber, ‘‘An exoskeleton for gait rehabilitation: Prototypedesign and control principle,’’ in Proc. IEEE Int. Conf. Robotics and Automation(ICRA’08), 2008, pp. 2037–2042.[8] J. Veneman, R. Kruidh<strong>of</strong>, E. Hekman, R. Ekkelenkamp, E. VanAsseldonk, and H. van der Kooij, ‘‘Design and evaluation <strong>of</strong> thelopes exoskeleton robot for interactive gait rehabilitation,’’ IEEETrans. Neural Syst. Rehabil. Eng., vol.15,no.3,pp.379–386, Sept.2007.[9] S. K. Banala, S. K. Agrawal, A. Fattah, V. Krishnamoorthy, W.-L. S.Hsu, and K. J. Rudolph, ‘‘Gravity-balancing leg orthosis and itsperformance evaluation,’’ IEEE Trans. Robot., vol. 22, no. 6, pp. 1228–1239, Dec. 2006.[10] H. Blaya and J. A. Herr, ‘‘Adaptive control <strong>of</strong> a variable-impedanceankle-foot orthosis to assist drop-foot gait,’’ IEEE Trans. Neural Syst.Rehabil. Eng., vol. 12, no. 1, pp. 24–31, Mar. 2004.[11] K. W. Hollander, R. Ilg, T. G. Sugar, and D. Herring, ‘‘An efficientrobotic tendon for gait assistance,’’ J. Biomech. Eng., vol. 128, no. 5,pp. 788–791, Oct. 2006.[12] S. Au, J. Weber, and H. Herr, ‘‘Biomechanical design <strong>of</strong> a poweredankle-foot prosthesis,’’ in Proc. IEEE 10th Int. Conf. RehabilitationRobotics (ICORR’07), June 2007, pp. 298–303.[13] J. Hitt, R. Bellman, M. Holgate, T. Sugar, and K. Hollander, ‘‘Thesparky (spring ankle <strong>with</strong> regenerative kinetics) projects: Design andanalysis <strong>of</strong> a robotic transtibial prosthesis <strong>with</strong> regenerative kinetics,’’ inProc. ASME Int. Design Engineering Technical Conf., Sept. 2007, pp. 1–10[CD–ROM].[14] R. Van Ham, B. Vanderborght, M. Van Damme, B. Verrelst, and D.Lefeber, ‘‘MACCEPA, the mechanically adjustable compliance andcontrollable equilibrium position actuator: Design and implementationin a biped robot,’’ Robot. Autonom. Syst., vol. 55, no. 10, pp. 761–768,Oct. 2007.[15] S. H. Collins, A. Ruina, R. Tedrake, and M. Wisse, ‘‘Efficient bipedalrobots based on passive-dynamic walkers,’’ Science, vol. 18, no. 307,pp. 1082–1085, Feb. 2005.[16] J. W. Hurst, J. Chestnutt, and A. A. Rizzi, ‘‘An actuator <strong>with</strong> physicallyvariable stiffness for highly dynamic legged locomotion, NewOrleans, USA,’’ in Proc. IEEE Int. Conf. Robotics and Automation(ICRA’04), 2004, pp. 4662–4667.[17] B. VanderBorght, B. Verrelst, R. Van Ham, M. Van Damme, P. Beyl,and D. Lefeber, ‘‘Development <strong>of</strong> a compliance controller to reduceenergy consumption for bipedal robots,’’ Autonom. Robots, vol. 24,no. 4, pp. 419–434, May 2008.[18] A. Albu-Schaffer, C. Ott, U. Frese, and G. Hirzinger, ‘‘Cartesianimpedance control <strong>of</strong> redundant robots: Recent results <strong>with</strong> the DLRlight-weight-arms,’’in Proc. IEEE Int. Conf. Robotics and Automation(ICRA’03), Sept. 2003, vol. 3, pp. 3704–3709.[19] G. A. Pratt and M. M. Williamson, ‘‘Series elastic actuators,’’ in Proc.IEEE Int. Workshop on Intelligent Robots and Systems (IROS’95), Pittsburg,USA, 1995, pp. 399–406.[20] J. Jayender, R. Patel, S. Nikumb, and M. Ostojic, ‘‘Modeling and control<strong>of</strong> shape memory alloy actuators,’’ IEEE Trans. Control Syst. Technol.,vol. 16, no. 2, pp. 279–287, 2008.[21] N. Takesue, Z. G. , M. Furusho, and J. Sakaguchi, ‘‘Precise positioncontrol <strong>of</strong> robot arms using a homogeneous ER fluid,’’ IEEE ControlSyst. Mag., vol. 19, no. 2, pp. 55–61, 1999.[22] B. Jones and C. Liang, ‘‘Magnetostriction: Revealing the unknown,’’IEEE Aerospace Electron. Syst. Mag., vol. 11, no. 3, pp. 3–6, 1996.[23] J. Shea, ‘‘Electroactive polymers (EAP),’’ IEEE Electr. Insul. Mag.,vol. 18, no. 1, pp. 47–48, 2002.[24] S. K. Au, J. Weber, E. Martinez-Villapando, and H. Herr, ‘‘Poweredankle-foot prosthesis for the improvement <strong>of</strong> amputee ambulation,’’ inProc. IEEE Int. Conf. Engineering in Medicine and Biology, Aug. 2007,pp. 3020–3026.[25] S. A. Migliore, E. A. Brown, and S. P. DeWeerth, ‘‘Biologicallyinspired joint stiffness control,’’ in Proc. IEEE Int. Conf. Robotics andAutomation (ICRA’05), Apr. 2005, pp. 4519–4524.[26] K. Koganezawa, T. Inaba, and T. Nakazawa, ‘‘Stiffness and angle control<strong>of</strong> antagonistially driven joint,’’ in Proc. 1st IEEE/RAS-EMBS Int.Conf. Biomedical Robotics and Biomechatronics (BioRob’06), 2006,pp. 1007–1013.[27] C. English and D. Russell, ‘‘Mechanics and stiffness limitations <strong>of</strong> avariable stiffness actuator for use in prosthetic limbs,’’ Mechanism Mach.Theor., vol. 34, no. 1, pp. 7–25, Jan. 1999.[28] G. Tonietti, R. Schiavi, and A. Bicchi, ‘‘Design and control <strong>of</strong> avariable stiffness actuator for safe and fast physical human/robot interaction,’’in Proc. 2005 IEEE Int. Conf. Robotics and Automation (ICRA’05),2005, pp. 526–531.[29] R. Kolacinski and R. Quinn, ‘‘Design and mechanics <strong>of</strong> an antagonisticbiomimetic actuator system,’’ in Proc. 1998 IEEE Int. Conf. Roboticsand Automation, 1998, vol. 2, pp. 1629–1634.[30] R. Horst and R. Marcus, ‘‘Flexcva: A continuously variable actuatorfor active orthotics,’’ in 28th Proc. Annu. Int. Conf. IEEE Engineering inMedicine and Biology Society (EMBS’06), 2006, vol. 1, pp. 2425–2428.SEPTEMBER 2009 IEEE Robotics & Automation Magazine 93
[31] J. W. Hurst, J. Chestnutt, and A. Rizzi, ‘‘An actuator <strong>with</strong> mechanicallyadjustable series compliance,’’ Carnegie Mellon Univ., USA,CMU-RI-TR-04-24, Apr. 2004.[32] I. Thorson, M. Svinin, S. Hosoe, F. Asano, and K. Taji, ‘‘Design considerationsfor a variable stiffness actuator in a robot that walks and runs,’’in Proc. JSME Conf. Robotics and Mechatronics, May 2007, pp. 101–105.[33] C.-P. Chou and B. Hannaford, ‘‘Measurement and modeling <strong>of</strong> mckibbenpneumatic artificial muscles,’’ IEEE Trans. Robotics and Automation,vol. 12, no. 1, pp. 90–102, 1996.[34] B. Verrelst, R. Van Ham, B. Vanderborght, F. Daerden, and D. Lefeber,‘‘The pneumatic biped LUCY actuated <strong>with</strong> pleated pneumatic artificialmuscles,’’ Autonom. Robots, vol. 18, no. 13, pp. 201–213, 2005.[35] K. Bharadwaj, T. G. Sugar, J. B. Koeneman, and E. J. Koeneman,‘‘Design <strong>of</strong> a robotic gait trainer using spring over muscle actuators forankle stroke rehabilitation,’’ ASME J. Biomech. Eng. (Special Issue onMedical Devices), vol. 127, pp. 1009–1013, 2005.[36] K. Hollander and T. Sugar, ‘‘Concepts for compliant actuation inwearable robotic systems,’’ in Proc. US-Korea Conf. Science, Technology andEntrepreneurship (UKC’04), 2004, vol. 128, pp. 644–650.[37] H. Seki, A. Takada, Y. Kamiya, M. Hikizu, and H. Nomura, ‘‘Development<strong>of</strong> a robot joint mechanism <strong>with</strong> variable compliance by rotatinga leaf spring,’’ in Proc. Japan/USA Flexible Automation Conf., 2000,pp. 13019–13024.[38] S. Kawamura, T. Yamamoto, D. Ishida, T. Ogata, Y. Nakayama, O.Tabata, and S. Sugiyama, ‘‘Development <strong>of</strong> passive elements <strong>with</strong>variable mechanical impedance for wearable robots,’’ in Proc. IEEE Int.Conf. Robotics and Automation (ICRA’02), 2002, vol. 1, pp. 248–253.[39] O. Tabata, S. Konishi, P. Cusin, Y. Ito, F. Kawai, S. Hirai, and S.Kawamura, ‘‘Micr<strong>of</strong>abricated tunable bending stiffness device,’’ in Proc.13th Annu. Int. Conf. Micro Electro Mechanical Systems (MEMS 2000),Jan. 2000, pp. 23–27.[40] T. Morita and S. Sugano, ‘‘Development <strong>of</strong> a new robot joint using amechanical impedance adjuster,’’ in Proc. IEEE Int. Conf. Robotics andAutomation (ICRA’95), May 1995, vol. 3, pp. 2469–2475.[41] ——, ‘‘Development <strong>of</strong> an anthropomorphic force-controlled manipulatorwam-10,’’ in Proc. 8th Int. Conf. Advanced Robotics (ICAR’97),1997, pp. 701–706.[42] A. D. U. Tasch, ‘‘A two-d<strong>of</strong> manipulator <strong>with</strong> adjustable compliancecapabilities and comparison <strong>with</strong> the human finger,’’ J. Robot. Syst.,vol. 13, no. 1, pp. 25–34, 1996.[43] K. Hollander, T. Sugar, and D. Herring, ‘‘<strong>Adjustable</strong> robotic tendonusing a ‘‘jack spring’’,’’ in Proc. 9th Int. Conf. Rehabilitation Robotics(ICORR’05), June–July 2005, pp. 113–118.[44] V. Duindam and S. Stramigioli, ‘‘Optimization <strong>of</strong> mass and stiffnessdistribution for efficient bipedal walking,’’ in Proc. 2005 Int. Symp. NonlinearTheory and Its Applications, 2005, pp. 481–484.[45] R. Van Ham, M. Van Damme, B. Verrelst, B. Vanderborght, and D.Lefeber, ‘‘MACCEPA, the mechanically adjustable compliance andcontrollable equilibrium position actuator: A 3DOF joint <strong>with</strong> 2 independentcompliances,’’ Int. Appl. Mech., vol. 4, pp. 130–142, Apr. 2007.[46] Y. Mao, J. Wang, P. Jia, S. Li, Z. Qiu, L. Zhang, and Z. Han, ‘‘A reinforcementlearning based dynamic walking control,’’ in Proc. IEEE Int.Conf. Robotics and Automation (ICRA 2007), April 2007.[47] J. Sulzer, M. Peshkin, and J. Patton, ‘‘MARIONET: An exotendondriven,rotary series elastic actuator for exerting joint torque,’’ in InternationalConference on Robotics for Rehabilitation (ICORR 2005), 2005,pp. 103–108.[48] S. Wolf and G. Hirzinger, ‘‘A new variable stiffness design: Matchingrequirements <strong>of</strong> the next robot generation,’’ in accepted at ICRA 2008:IEEE International Conference on Robotics and Automation (ICRA2008), 2008.Ronald Van Ham received his degree in electromechanicalengineering at the Vrije Universiteit Brussel in 1999and Ph.D. degree in applied science in 2007. He is currentlya postdoctoral researcher on the integration <strong>of</strong> theseactuators in rehabilitation robots. He performed research onpleated pneumatic muscles and later developed the MAC-CEPA actuator.Thomas G. Sugar received his B.Sc. and Ph.D. degrees inbusiness and mechanical engineering from the University <strong>of</strong>Pennsylvania. He worked as a project engineer for W. L.Gore and Associates. He has been a faculty member in theDepartment <strong>of</strong> Mechanical and Aerospace Engineering andthe Department <strong>of</strong> Engineering at Arizona State University.His research interests include compliant wearable robotsusing tunable springs.Bram Vanderborght received his degree in mechanicalengineering at the Vrije Universiteit Brussel in 2003 andPh.D. degree in applied sciences in May 2007. The focus <strong>of</strong>his research was the use <strong>of</strong> adaptable compliance <strong>of</strong> pneumaticartificial muscles in the biped Lucy. From October2007 to September 2008, he worked as postdoctoral researcherat the Italian Institute <strong>of</strong> Technology (IIT). SinceOctober 2008, he works both at the IIT and the VUB. Hisresearch interests include humanoids, bipedal locomotion,compliant actuation, rehabilitation robotics, and safe andcognitive HRI.Kevin W. Hollander has been involved in a variety <strong>of</strong> biomechanicsand clinical-related research projects over the past17 years, including the areas <strong>of</strong> bone and tissue research andhuman gait. The JackSpring actuator concept and the basicRobotic Tendon design approach were developed as part <strong>of</strong>his Ph.D. thesis.Dirk Lefeber received his degree in civil engineering andPh.D. degree in applied sciences at the Vrije UniversiteitBrussel in 1979 and 1986, respectively. He is currently a fullpr<strong>of</strong>essor and head <strong>of</strong> the Mechanical Engineering Departmentand the Robotics and Multibody Mechanics ResearchGroup, Vrije Universiteit Brussel. His research interestsinclude new actuators <strong>with</strong> adaptable compliance, dynamicallybalanced robots, robot assistants, rehabilitation robotics,and multibody dynamics. He is a Member <strong>of</strong> the IEEE.Address for Correspondence: Ronald Van Ham, Department <strong>of</strong>Mechanical Engineering, Vrije Universiteit Brussel, Pleinlaan2, 1050 Brussel, Belgium. E-mail: ronald.van.ham@vub.ac.be.94 IEEE Robotics & Automation MagazineSEPTEMBER 2009