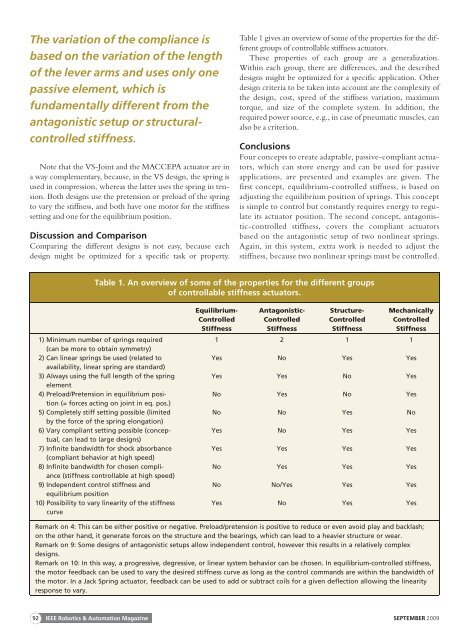
The variation <strong>of</strong> the compliance isbased on the variation <strong>of</strong> the length<strong>of</strong> the lever arms and uses only onepassive element, which isfundamentally different from theantagonistic setup or structuralcontrolledstiffness.Note that the VS-Joint and the MACCEPA actuator are ina way complementary, because, in the VS design, the spring isused in compression, whereas the latter uses the spring in tension.Both designs use the pretension or preload <strong>of</strong> the springto vary the stiffness, and both have one motor for the stiffnesssetting and one for the equilibrium position.Discussion and ComparisonComparing the different designs is not easy, because eachdesign might be optimized for a specific task or property.Table 1 gives an overview <strong>of</strong> some <strong>of</strong> the properties for the differentgroups <strong>of</strong> controllable stiffness actuators.These properties <strong>of</strong> each group are a generalization.Within each group, there are differences, and the describeddesigns might be optimized for a specific application. Otherdesign criteria to be taken into account are the complexity <strong>of</strong>the design, cost, speed <strong>of</strong> the stiffness variation, maximumtorque, and size <strong>of</strong> the complete system. In addition, therequired power source, e.g., in case <strong>of</strong> pneumatic muscles, canalso be a criterion.ConclusionsFour concepts to create adaptable, passive-compliant actuators,which can store energy and can be used for passiveapplications, are presented and examples are given. Thefirst concept, equilibrium-controlled stiffness, is based onadjusting the equilibrium position <strong>of</strong> springs. This conceptis simple to control but constantly requires energy to regulateits actuator position. The second concept, antagonistic-controlledstiffness, covers the compliant actuatorsbased on the antagonistic setup <strong>of</strong> two nonlinear springs.Again, in this system, extra work is needed to adjust thestiffness, because two nonlinear springs must be controlled.Table 1. An overview <strong>of</strong> some <strong>of</strong> the properties for the different groups<strong>of</strong> controllable stiffness actuators.1) Minimum number <strong>of</strong> springs required(can be more to obtain symmetry)2) Can linear springs be used (related toavailability, linear spring are standard)3) Always using the full length <strong>of</strong> the springelement4) Preload/Pretension in equilibrium position(= forces acting on joint in eq. pos.)5) Completely stiff setting possible (limitedby the force <strong>of</strong> the spring elongation)6) Vary compliant setting possible (conceptual,can lead to large designs)7) Infinite bandwidth for shock absorbance(compliant behavior at high speed)8) Infinite bandwidth for chosen compliance(stiffness controllable at high speed)9) Independent control stiffness andequilibrium position10) Possibility to vary linearity <strong>of</strong> the stiffnesscurveEquilibrium-ControlledStiffnessAntagonistic-ControlledStiffnessStructure-ControlledStiffnessMechanicallyControlledStiffness1 2 1 1Yes No Yes YesYes Yes No YesNo Yes No YesNo No Yes NoYes No Yes YesYes Yes Yes YesNo Yes Yes YesNo No/Yes Yes YesYes No Yes YesRemark on 4: This can be either positive or negative. Preload/pretension is positive to reduce or even avoid play and backlash;on the other hand, it generate forces on the structure and the bearings, which can lead to a heavier structure or wear.Remark on 9: Some designs <strong>of</strong> antagonistic setups allow independent control, however this results in a relatively complexdesigns.Remark on 10: In this way, a progressive, degressive, or linear system behavior can be chosen. In equilibrium-controlled stiffness,the motor feedback can be used to vary the desired stiffness curve as long as the control commands are <strong>with</strong>in the bandwidth <strong>of</strong>the motor. In a Jack Spring actuator, feedback can be used to add or subtract coils for a given deflection allowing the linearityresponse to vary.92 IEEE Robotics & Automation MagazineSEPTEMBER 2009
The third concept, structural-controlled stiffness, allowsadaptable compliance. The Jack Spring was presented,which actively tunes the intrinsic stiffness <strong>of</strong> the spring.The last concept is mechanically controlled stiffness, inwhich the MACCEPA and VS-Joint are novel actuators<strong>with</strong> independently controllable compliance and equilibriumposition.We believe that adjustable, passive, compliant actuators willrise in importance for two reasons, safe human/machineinteraction, and energy savings. Although different designs <strong>of</strong>compliant actuators are currently under investigation, theultimate design combining a stiffness range from completelystiff to zero stiffness, lightweight and compact, and easy tocontrol has not yet been invented. One can conclude that, inthe field <strong>of</strong> compliant actuation, much research is still possibleon the actuator itself, applications, and how to control theadjustable compliance. We hope to see more roboticists designingthe next generation <strong>of</strong> passive, compliant-actuatorsand their controller architectures.KeywordsControllable stiffness actuators, adjustable complianceactuators.References[1] R. Alexander, ‘‘Three uses <strong>of</strong> springs in legged locomotion,’’ Int. J.Robot. Res. (Special Issue on Legged Locomotion), vol. 9, no. 2, pp. 53–61,1990.[2] M. Zinn, O. Khatib, B. Roth, and J. Salisbury, ‘‘Playing it safe [humanfriendlyrobots],’’ IEEE Robot. Automat. Mag., vol. 11, no. 2, pp. 12–21,June 2004.[3] A. Bicchi and G. Tonietti, ‘‘Fast and s<strong>of</strong>t arm tactics: Dealing <strong>with</strong> thesafety-performance trade-<strong>of</strong>f in robot arms design and control,’’ IEEERobot. Automat. Mag., vol. 11, no. 2, pp. 22–33, 2004.[4] W. Stiehl, C. B. L. Lieberman, J. Breazeal, M. Lalla, and L. Wolf,‘‘Design <strong>of</strong> a therapeutic robotic companion for relational, affectivetouch,’’ in Proc. IEEE Int. Workshop on Robot and Human Interactive Communication(ROMAN’05), 2005, pp. 408–415.[5] J. Saldien, K. Goris, B. Vanderborght, B. Verrelst, R. Van Ham,and D. Lefeber, ‘‘Anty: The development <strong>of</strong> an intelligent huggablerobot for hospitalized children,’’ in Proc. 9th Int. Conf. Climbing andWalking Robots and the Support Technologies for Mobile Machines,2006.[6] S. Jezernik, G. Colombo, T. Keller, H. Frueh, and M. Morari,‘‘Robotic orthosis lokomat: A rehabilitation and research tool,’’ Neuromodulation,vol. 6, no. 2, pp. 108–115, Apr 2003.[7] P. Beyl, M. Van Damme, R. Van Ham, R. Versluys, B. Vanderborght,and D. Lefeber, ‘‘An exoskeleton for gait rehabilitation: Prototypedesign and control principle,’’ in Proc. IEEE Int. Conf. Robotics and Automation(ICRA’08), 2008, pp. 2037–2042.[8] J. Veneman, R. Kruidh<strong>of</strong>, E. Hekman, R. Ekkelenkamp, E. VanAsseldonk, and H. van der Kooij, ‘‘Design and evaluation <strong>of</strong> thelopes exoskeleton robot for interactive gait rehabilitation,’’ IEEETrans. Neural Syst. Rehabil. Eng., vol.15,no.3,pp.379–386, Sept.2007.[9] S. K. Banala, S. K. Agrawal, A. Fattah, V. Krishnamoorthy, W.-L. S.Hsu, and K. J. Rudolph, ‘‘Gravity-balancing leg orthosis and itsperformance evaluation,’’ IEEE Trans. Robot., vol. 22, no. 6, pp. 1228–1239, Dec. 2006.[10] H. Blaya and J. A. Herr, ‘‘Adaptive control <strong>of</strong> a variable-impedanceankle-foot orthosis to assist drop-foot gait,’’ IEEE Trans. Neural Syst.Rehabil. Eng., vol. 12, no. 1, pp. 24–31, Mar. 2004.[11] K. W. Hollander, R. Ilg, T. G. Sugar, and D. Herring, ‘‘An efficientrobotic tendon for gait assistance,’’ J. Biomech. Eng., vol. 128, no. 5,pp. 788–791, Oct. 2006.[12] S. Au, J. Weber, and H. Herr, ‘‘Biomechanical design <strong>of</strong> a poweredankle-foot prosthesis,’’ in Proc. IEEE 10th Int. Conf. RehabilitationRobotics (ICORR’07), June 2007, pp. 298–303.[13] J. Hitt, R. Bellman, M. Holgate, T. Sugar, and K. Hollander, ‘‘Thesparky (spring ankle <strong>with</strong> regenerative kinetics) projects: Design andanalysis <strong>of</strong> a robotic transtibial prosthesis <strong>with</strong> regenerative kinetics,’’ inProc. ASME Int. Design Engineering Technical Conf., Sept. 2007, pp. 1–10[CD–ROM].[14] R. Van Ham, B. Vanderborght, M. Van Damme, B. Verrelst, and D.Lefeber, ‘‘MACCEPA, the mechanically adjustable compliance andcontrollable equilibrium position actuator: Design and implementationin a biped robot,’’ Robot. Autonom. Syst., vol. 55, no. 10, pp. 761–768,Oct. 2007.[15] S. H. Collins, A. Ruina, R. Tedrake, and M. Wisse, ‘‘Efficient bipedalrobots based on passive-dynamic walkers,’’ Science, vol. 18, no. 307,pp. 1082–1085, Feb. 2005.[16] J. W. Hurst, J. Chestnutt, and A. A. Rizzi, ‘‘An actuator <strong>with</strong> physicallyvariable stiffness for highly dynamic legged locomotion, NewOrleans, USA,’’ in Proc. IEEE Int. Conf. Robotics and Automation(ICRA’04), 2004, pp. 4662–4667.[17] B. VanderBorght, B. Verrelst, R. Van Ham, M. Van Damme, P. Beyl,and D. Lefeber, ‘‘Development <strong>of</strong> a compliance controller to reduceenergy consumption for bipedal robots,’’ Autonom. Robots, vol. 24,no. 4, pp. 419–434, May 2008.[18] A. Albu-Schaffer, C. Ott, U. Frese, and G. Hirzinger, ‘‘Cartesianimpedance control <strong>of</strong> redundant robots: Recent results <strong>with</strong> the DLRlight-weight-arms,’’in Proc. IEEE Int. Conf. Robotics and Automation(ICRA’03), Sept. 2003, vol. 3, pp. 3704–3709.[19] G. A. Pratt and M. M. Williamson, ‘‘Series elastic actuators,’’ in Proc.IEEE Int. Workshop on Intelligent Robots and Systems (IROS’95), Pittsburg,USA, 1995, pp. 399–406.[20] J. Jayender, R. Patel, S. Nikumb, and M. Ostojic, ‘‘Modeling and control<strong>of</strong> shape memory alloy actuators,’’ IEEE Trans. Control Syst. Technol.,vol. 16, no. 2, pp. 279–287, 2008.[21] N. Takesue, Z. G. , M. Furusho, and J. Sakaguchi, ‘‘Precise positioncontrol <strong>of</strong> robot arms using a homogeneous ER fluid,’’ IEEE ControlSyst. Mag., vol. 19, no. 2, pp. 55–61, 1999.[22] B. Jones and C. Liang, ‘‘Magnetostriction: Revealing the unknown,’’IEEE Aerospace Electron. Syst. Mag., vol. 11, no. 3, pp. 3–6, 1996.[23] J. Shea, ‘‘Electroactive polymers (EAP),’’ IEEE Electr. Insul. Mag.,vol. 18, no. 1, pp. 47–48, 2002.[24] S. K. Au, J. Weber, E. Martinez-Villapando, and H. Herr, ‘‘Poweredankle-foot prosthesis for the improvement <strong>of</strong> amputee ambulation,’’ inProc. IEEE Int. Conf. Engineering in Medicine and Biology, Aug. 2007,pp. 3020–3026.[25] S. A. Migliore, E. A. Brown, and S. P. DeWeerth, ‘‘Biologicallyinspired joint stiffness control,’’ in Proc. IEEE Int. Conf. Robotics andAutomation (ICRA’05), Apr. 2005, pp. 4519–4524.[26] K. Koganezawa, T. Inaba, and T. Nakazawa, ‘‘Stiffness and angle control<strong>of</strong> antagonistially driven joint,’’ in Proc. 1st IEEE/RAS-EMBS Int.Conf. Biomedical Robotics and Biomechatronics (BioRob’06), 2006,pp. 1007–1013.[27] C. English and D. Russell, ‘‘Mechanics and stiffness limitations <strong>of</strong> avariable stiffness actuator for use in prosthetic limbs,’’ Mechanism Mach.Theor., vol. 34, no. 1, pp. 7–25, Jan. 1999.[28] G. Tonietti, R. Schiavi, and A. Bicchi, ‘‘Design and control <strong>of</strong> avariable stiffness actuator for safe and fast physical human/robot interaction,’’in Proc. 2005 IEEE Int. Conf. Robotics and Automation (ICRA’05),2005, pp. 526–531.[29] R. Kolacinski and R. Quinn, ‘‘Design and mechanics <strong>of</strong> an antagonisticbiomimetic actuator system,’’ in Proc. 1998 IEEE Int. Conf. Roboticsand Automation, 1998, vol. 2, pp. 1629–1634.[30] R. Horst and R. Marcus, ‘‘Flexcva: A continuously variable actuatorfor active orthotics,’’ in 28th Proc. Annu. Int. Conf. IEEE Engineering inMedicine and Biology Society (EMBS’06), 2006, vol. 1, pp. 2425–2428.SEPTEMBER 2009 IEEE Robotics & Automation Magazine 93