The compliance adjustment <strong>of</strong> theJack Spring mechanism is achievedby adding or subtracting the number<strong>of</strong> available coils used in a spring.<strong>of</strong> the compliance during operation. Thus, the characteristic <strong>of</strong>an imitated spring is programmed and as such is adjusted online;this is <strong>of</strong>ten referred to as active compliance. The main disadvantage<strong>of</strong> active compliance is continuous energy dissipation,whereas energy could be stored and subsequently released againwhen a passive element (e.g., a spring) is used.To combine energy storage and adaptable compliance, anelastic element to store energy is needed, together <strong>with</strong> a way toadapt the compliance. A substantial number <strong>of</strong> designs has beendeveloped. However, four main ideas can be distinguished.u Equilibrium-controlled stiffness: these compliant actuatorsuse a fixed stiffness spring in series <strong>with</strong> a traditionalmethod <strong>of</strong> actuation, e.g., electric motors or hydraulicsystems. The SEA measures the displacement <strong>of</strong> theunit and force on the spring to adjust the torque suppliedby the motor, otherwise known as impedancecontrol. To obtain variable stiffness, the virtual stiffness<strong>of</strong> the actuator is adjusted by dynamically adjusting theequilibrium position <strong>of</strong> the spring as is explained inthe ‘‘Equilibrium-Controlled Stiffness’’ section.u Antagonistic-controlled stiffness: two actuators <strong>with</strong> nonadaptablecompliance and nonlinear force-displacementcharacteristics are coupled antagonistically, workingagainst each other. By controlling both actuators andusing nonlinear springs, the compliance and equilibriumposition <strong>of</strong> this antagonistic setup can be set. Tobe able to vary the compliance, it is required that thespring characteristic <strong>of</strong> the two actuators is non-linear,while the resulting spring characteristic is linear. Inthe ‘‘Antagonistic-Controlled Stiffness’’ section, thisprinciple is described in more detail and some examplesare given.u Structure-controlled stiffness: unlike the previous twoconcepts, structure control modulates the effectivephysical structure <strong>of</strong> a spring to achieve variations instiffness. When using a beam as elastic element, thestiffness depends on material modulus, the moment <strong>of</strong>inertia, and the effective beam length. During operation,the stiffness can be controlled by adjusting one <strong>of</strong>these parameters. In the Jack Spring, the number <strong>of</strong>active coils in a helical spring is adjusted to vary the+F desiredΣ Controller−F loadActuatorSpringSensorFigure 1. Force control using a series elastic actuator.Loadstiffness. More about these types <strong>of</strong> designs can befound in the ‘‘Structure-Controlled Stiffness’’ section.u Mechanically controlled stiffness: similar to structure control,mechanical control also adjusts the effective physicalstiffness <strong>of</strong> the system. However, in this case, thefull length <strong>of</strong> the spring is always in use. The variationis done by changing the pretension or the preload <strong>of</strong>the spring, as is the case in the mechanically adjustablecompliance and controllable equilibrium positionactuator (MACCEPA) and the variable stiffness joint(VS-Joint). These actuators require only one compliantelement. The complete actuator behaves as a torsionspring where the spring characteristics and equilibriumposition can be controlled independently during operation.The principles and designs are elaborated in the‘‘Mechanically Controlled Stiffness’’ section.<strong>Passive</strong>, Controllable Stiffness <strong>Actuators</strong>Equilibrium-Controlled StiffnessThis section starts <strong>with</strong> a description <strong>of</strong> the SEA, which isforce controlled and has a fixed compliance. Then, an example<strong>of</strong> a SEA variant <strong>with</strong> a second spring used in parallel isgiven. Finally, the concept <strong>of</strong> equilibrium-controlled stiffnessis explained.Series Elastic ActuatorThe SEA [19] is essentially a spring in series <strong>with</strong> a stiff actuator.The compliance is determined by the spring constant andis therefore not adjustable during operation. The SEA is acompliant actuator allowing force to be controlled in an easymanner. Figure 1 shows a typical setup <strong>of</strong> a SEA for force control.The elongation <strong>of</strong> the spring is used as force measurementand fed back in the control loop.SEA VariantAu et al. at Massachusetts Institute <strong>of</strong> Technology (MIT) [24]developed a prosthetic ankle-foot device that uses a variant <strong>of</strong>the SEA in a parallel configuration <strong>with</strong> a passive unidirectionalspring that is elongated when the ankle angle is less thanzero degrees (ankle dorsiflexed). The stiffness <strong>of</strong> the parallelspring is chosen by estimating the slope <strong>of</strong> the measured torque-anglecurve and is also used to reduced shock loads. Theparallel stiffness is also selected to increase the required openloopforce-bandwidth.Equilibrium-Controlled Stiffness ConceptSugar has also developed a spring-based actuator, which usesthe concept <strong>of</strong> equilibrium-controlled stiffness. A linear springis added in series to a stiff actuator, and the equilibrium position<strong>of</strong> the spring is controlled to exert a desired force ordesired stiffness [11], [25]. The compliance is actively changedusing a control law instead <strong>of</strong> fixing the compliance by passivelyadding springs. The force-control problem is convertedto a position-control problem using electric motors. Themotor position is adjusted based on the deflection <strong>of</strong> the springto alter the tension or compression <strong>of</strong> the spring.84 IEEE Robotics & Automation MagazineSEPTEMBER 2009
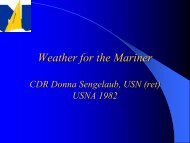
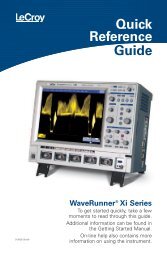
The intrinsic spring stiffness cannot be altered, but the linkor limb stiffness can be selectively varied using an active controllaw, therefore adjusting the virtual stiffness. Figure 2explains the control <strong>of</strong> a single actuator. The force applied bythe link is given byF ¼ K act (l s a), (4)where l is the length <strong>of</strong> the actuator, s is the length <strong>of</strong> the internalball screw that adjusts the equilibrium position <strong>of</strong> thespring, and a is the free length <strong>of</strong> the spring. K act is the intrinsicspring stiffness. If a desired behavior is given byF F o ¼ K des (l l o ), (5)about an operating point (F o , l 0 ), the desired actuator positionis given bys des ¼ l a þ (F 0 K des (l l 0 ))=K act : (6)Thus, a position-control scheme achieves the stiffness control<strong>of</strong> a single compliant limb. Controlling the position <strong>of</strong> dcmotors is very simple and differs from the work by Pratt wherethey controlled the torque on the motors and, in turn, controlledthe impedance. The disadvantages <strong>of</strong> using an approachto control the virtual stiffness are that the performance islimited by the bandwidth <strong>of</strong> the controller (e.g., during impactthe hardware stiffness will be felt), and it consumes energy toadjust the position <strong>of</strong> the spring. One overlooked advantage isthat the compliant spring acts to passively change the transmissionratio <strong>of</strong> the system. For example, if a force compresses thespring to the left and the desired behavior is to move the limbto the right, then as the spring compresses, the motor mustspin faster thus increasing the transmission ratio at the opportunemoment.Antagonistic-Controlled StiffnessThe best-known example <strong>of</strong> an antagonistic setup is the combination<strong>of</strong> biceps and triceps in the human arm. When thebiceps contracts and the triceps relaxes, the arm is flexed. Whenthe triceps contracts and the biceps relaxes, the arm extends.One <strong>of</strong> the reasons why an antagonistic setup is required is thefact that muscles can only pull and not push. However, morecan be achieved <strong>with</strong> this setup: when both biceps and tricepscontract, the elbow becomes stiff; when they both relax, theelbow becomes very compliant and the arm hangs freely. Inreality, the muscles in the human arm are controlled in acontinuous way and, thus, the system can cover a whole range<strong>of</strong> positions and compliant behavior. The biologically inspiredconcept <strong>of</strong> an antagonistic setup is used in a number <strong>of</strong>mechanical actuators to obtain adaptable compliance.The Necessity <strong>of</strong> Nonlinear SpringsThe nonlinearity <strong>of</strong> the spring is essential to obtain the adaptablecompliance. To explain this, a simple linear antagonisticsetup (Figure 3) is used. The two springs are linear and havethe same spring constant. In Figure 3, x 0A and x 0B are the<strong>Adjustable</strong>, passive, compliantactuators will rise in importance fortwo reasons, safe human/machineinteraction, and energy savings.controllable positions when zero force is applied by thesprings (the rest length <strong>of</strong> both springs is assumed zero). Eachposition can be independently controlled requiring twoactuators. The force on the block in the center is the sum <strong>of</strong>the forces <strong>of</strong> both springs:The stiffness becomesF ¼ k(x x 0A ) þ k(x 0B x)¼ 2kx þ k(x 0A x 0B ): (7)j ¼ dF ¼ 2k: (8)dxThis result is independent <strong>of</strong> the controllable parametersx 0A and x 0B , and consequently, the compliance is uncontrollableif linear springs are selected.When two springs <strong>with</strong> a quadratic characteristic are used,the force isx 0AF ¼ k(x x 0A ) 2 þ k(x 0B x) 2¼ 2kx(x 0A x 0B ) þ k(x 2 0B x 2 0A ): (9)x(a)sFigure 3. Demonstration <strong>of</strong> the necessity <strong>of</strong> using nonlinearsprings.(b)(c)x 0Ba = Free LengthK actFigure 2. System for one limb. The limb length is measuredby l, whereas the internal motor adjusts the length s. Thecompliance <strong>of</strong> the limb is adjusted by varying the length s.lSEPTEMBER 2009 IEEE Robotics & Automation Magazine 85